
Design of and Experiment with a Dual-Arm Apple Harvesting Robot System



Abstract
1. Introduction
2. Materials and Methods
2.1. System Design
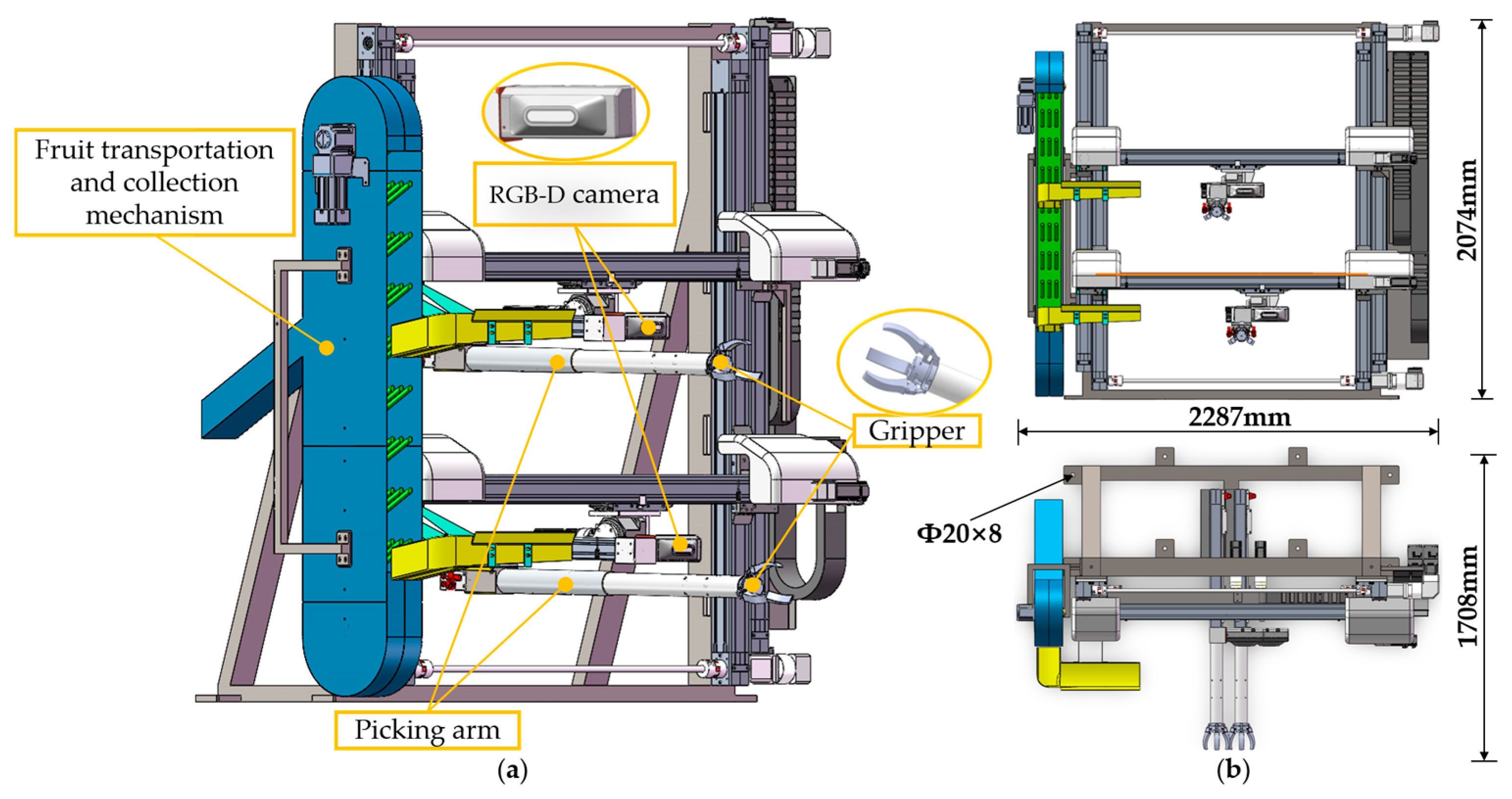
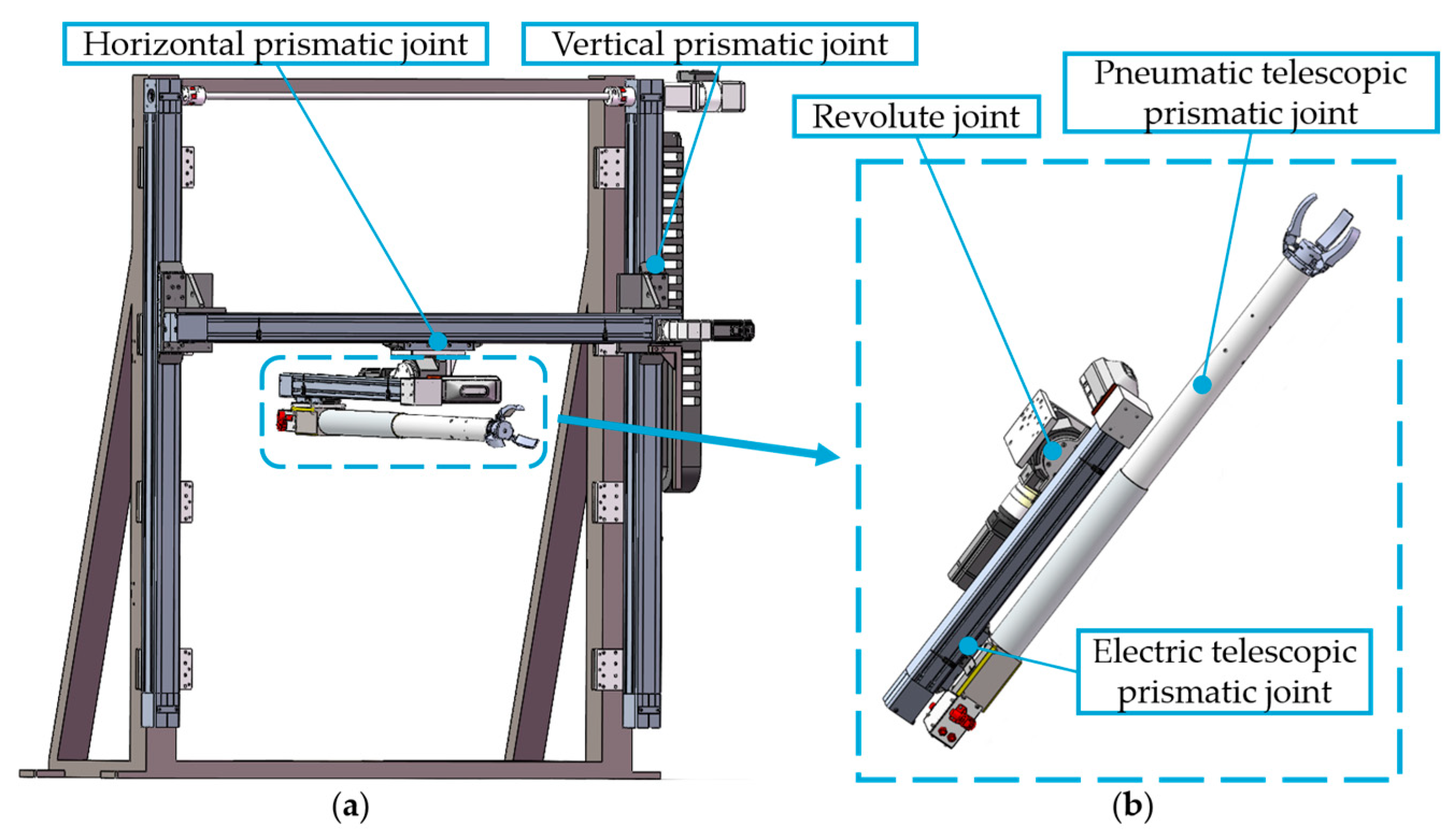
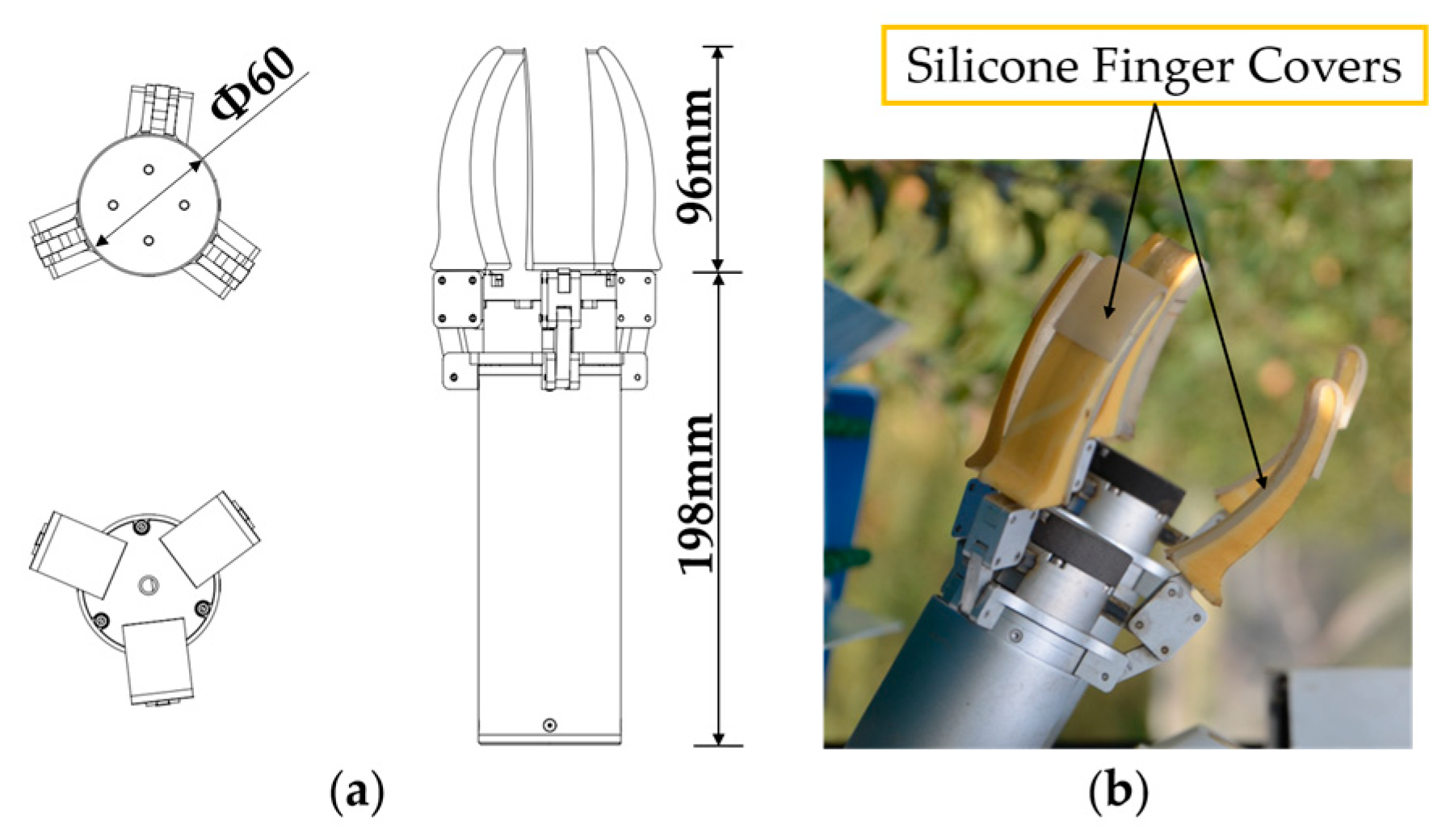
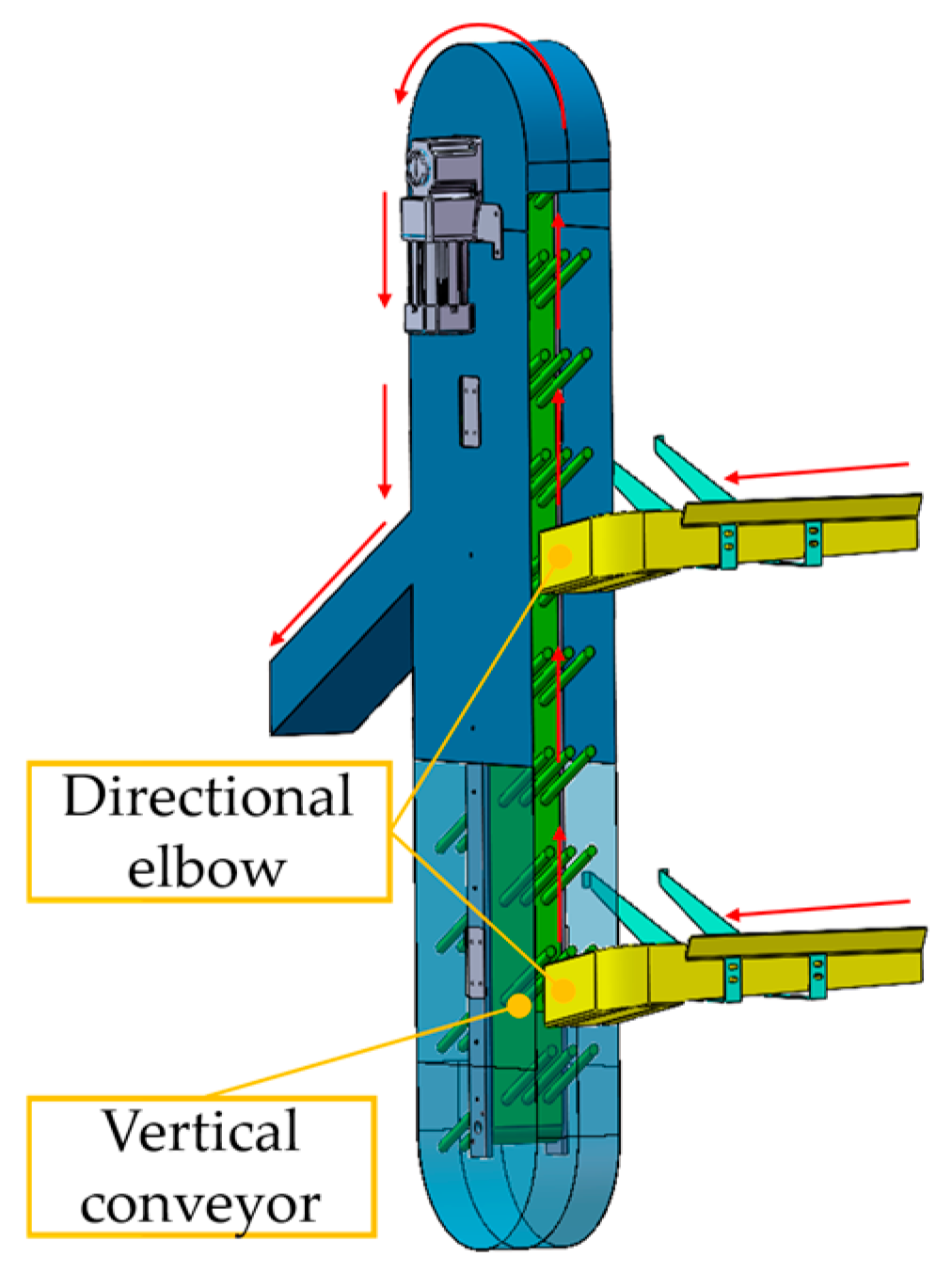
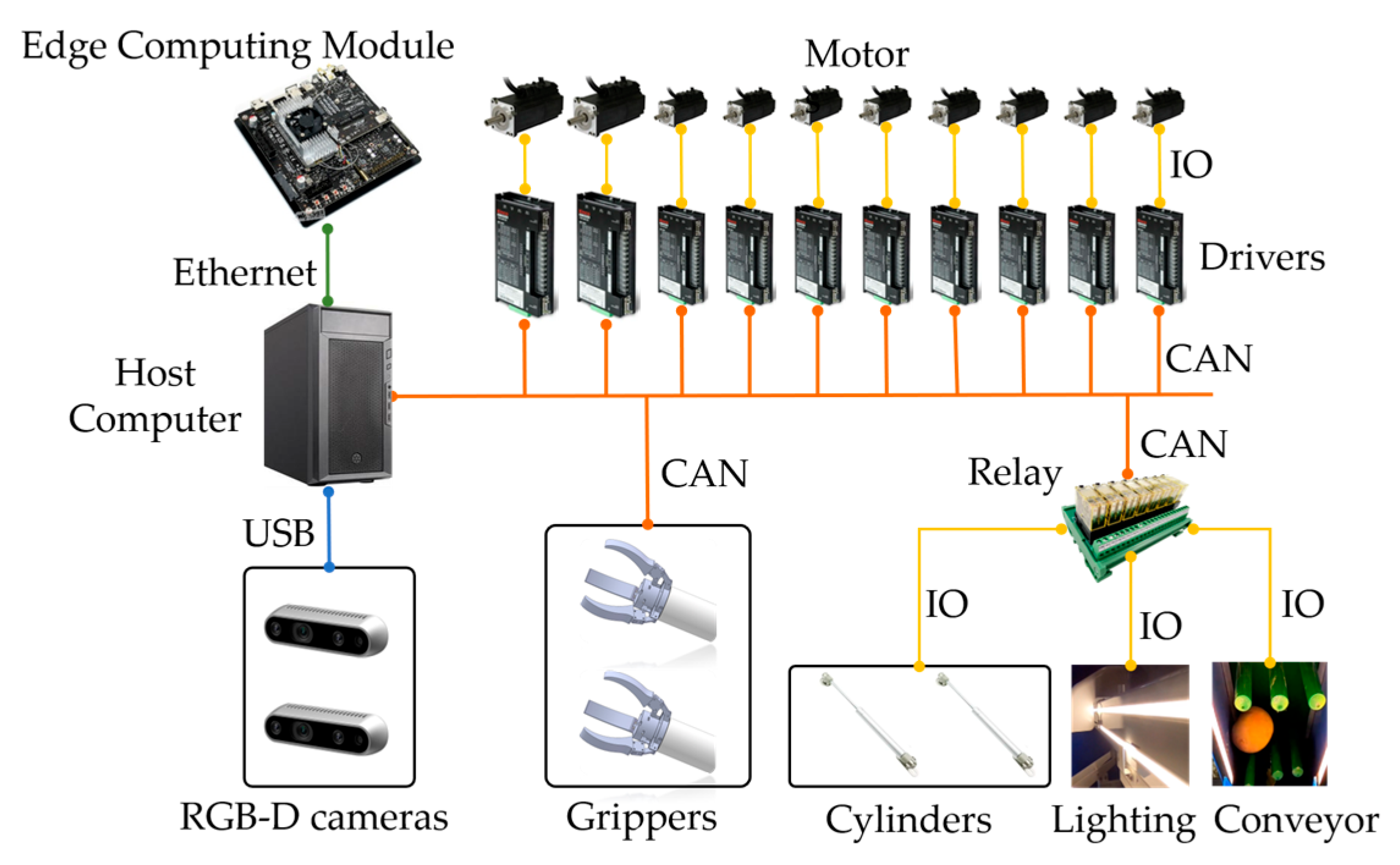
2.1.1. Hardware Design
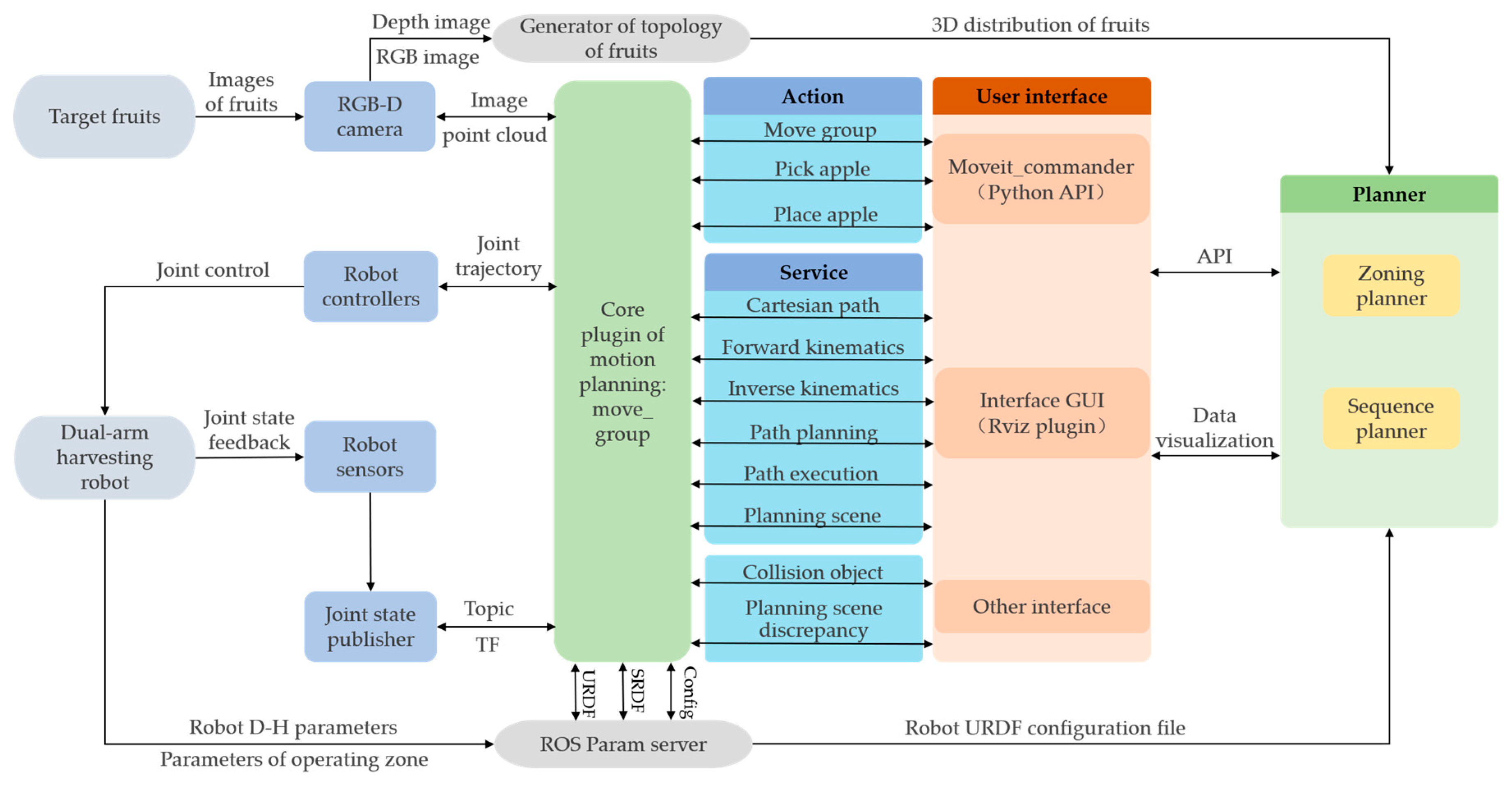
2.1.2. Control System Design
2.1.3. Workflow
2.2. Fruit Detection and Localization
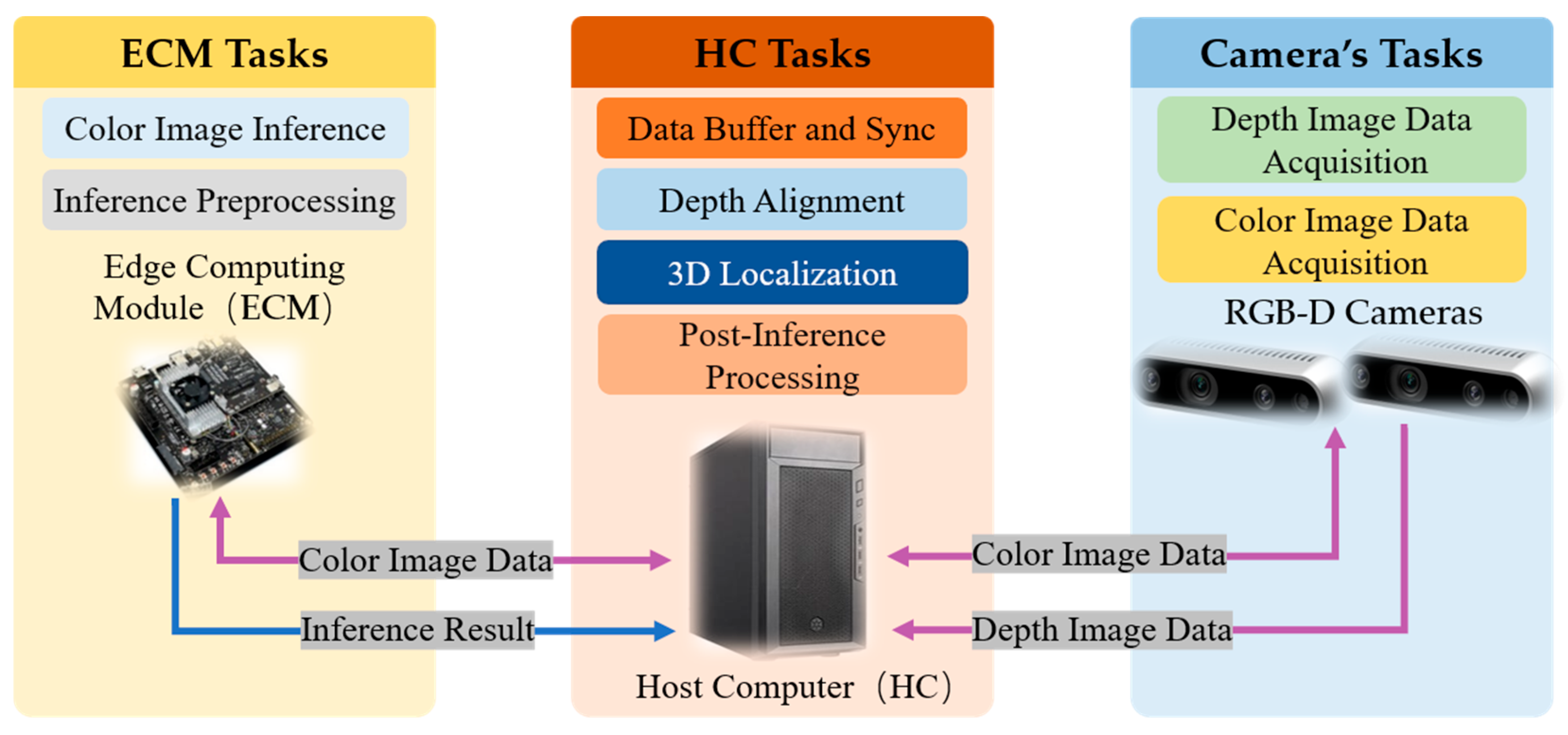
2.2.1. Dual-Vision Fruit Information Acquisition System
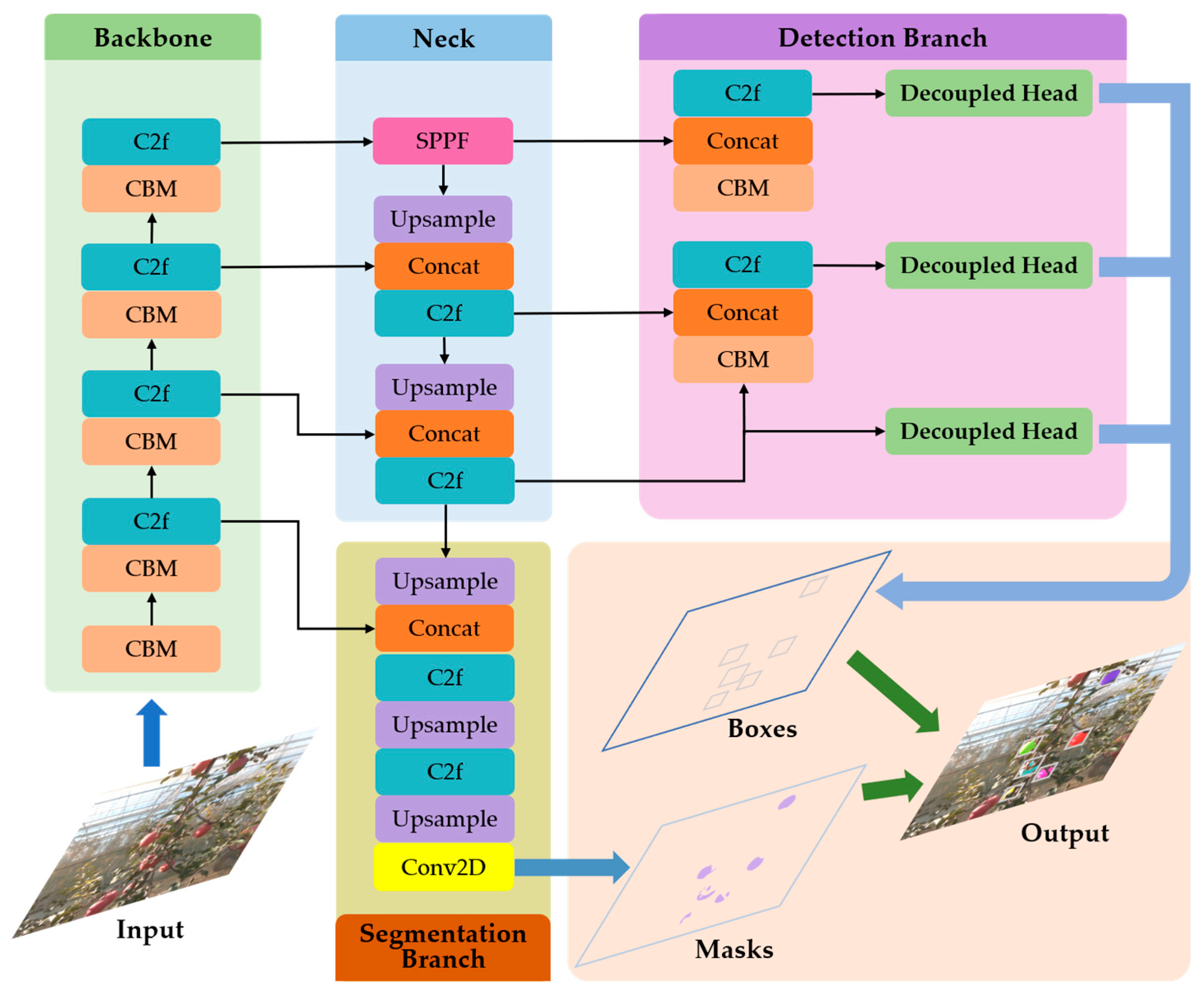
2.2.2. Multi-Task Network Based on Improved YOLOv8
2.2.3. Accurate 3D Localization of Fruit Based on Visual Cone Method
2.3. Genetic Algorithm Based on Dual-Arm Task Planning
3. Robot Field Experiments and Results
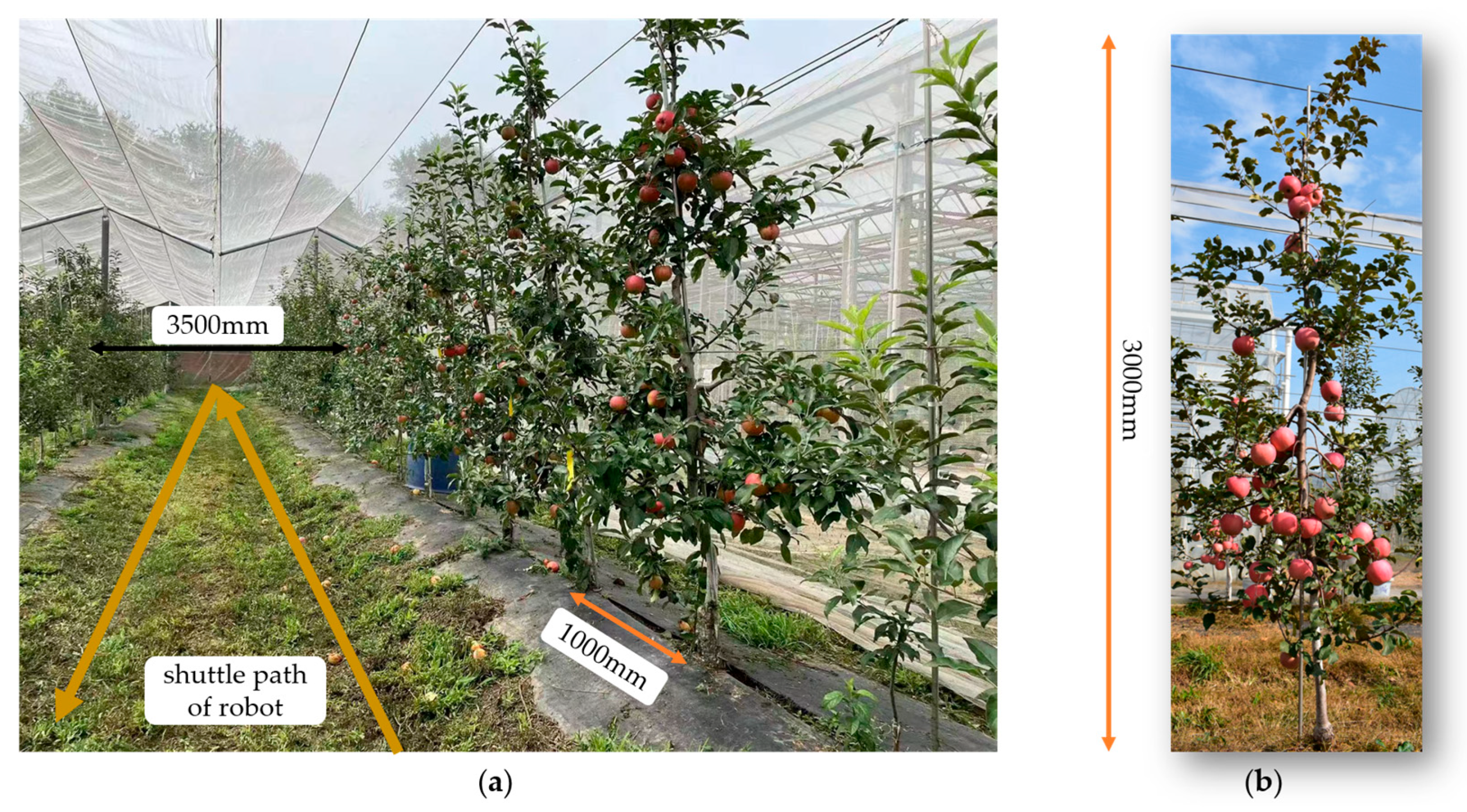
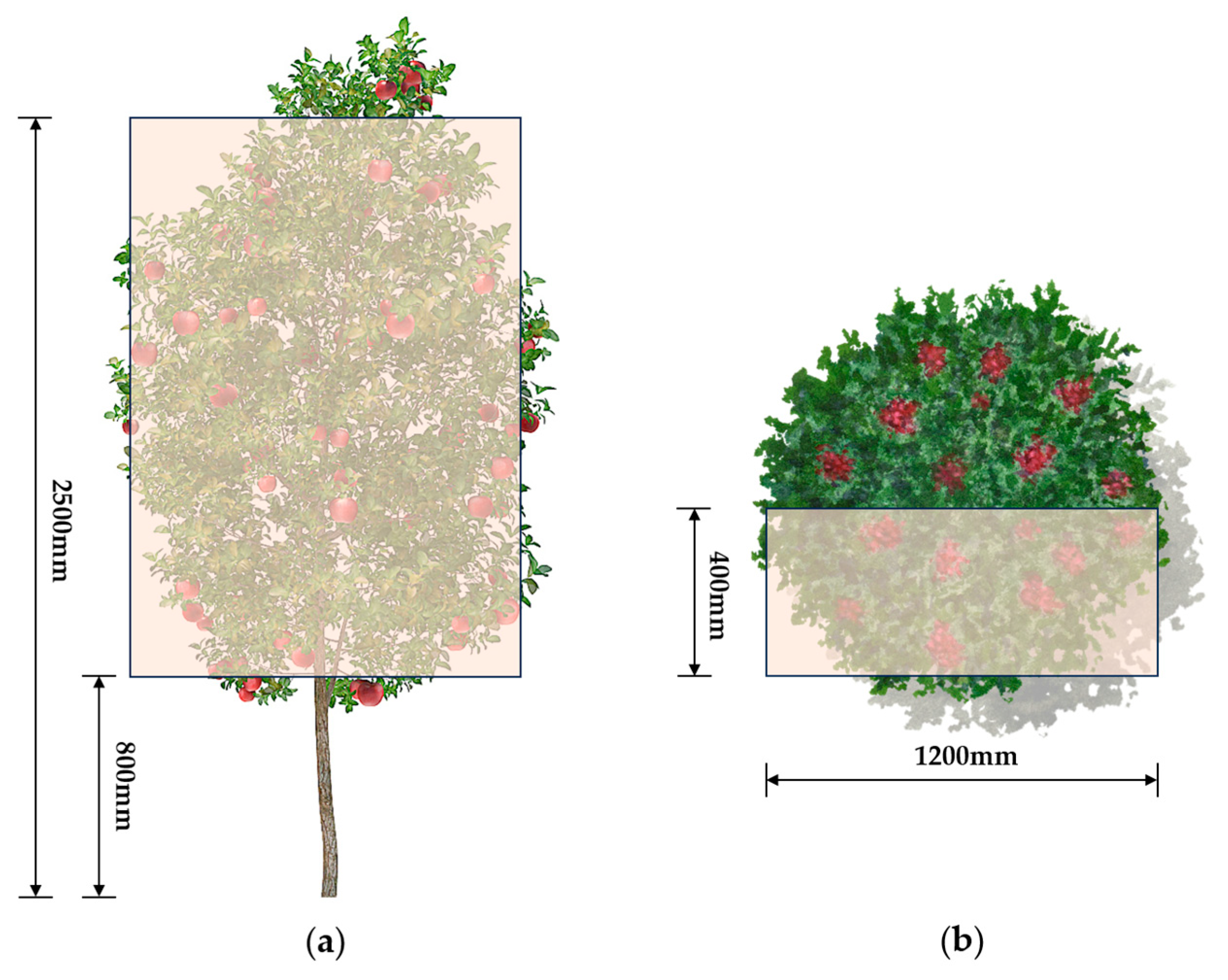
3.1. Experimental Scenario
3.2. Results Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chang, Q.; Li, J. Development trend of apple industry in China since 2000. North. Hortic. 2021, 3, 155–160. [Google Scholar]
- Fang, J. Present situation and development of mobile harvesting robot. Trans. Chin. Soc. Agric. Eng. 2004, 20, 273–278. [Google Scholar]
- Ao, M. Research status and countermeasures of fruit and vegetable picking robot. Equip. Manuf. Technol. 2019, 3, 128–131. [Google Scholar]
- Zhang, Z.; Igathinathane, C.; Li, J.; Chen, H.; Lu, Y.; Flores, P. Technology progress in mechanical harvest of fresh market apples. Comput. Electron. Agric. 2020, 175, 105606. [Google Scholar] [CrossRef]
- Bac, C.W.; Hemming, J.; van Tuijl, B.A.J.; Barth, R.; Wais, E.; van Henten, E.J. Performance Evaluation of a Harvesting Robot for Sweet Pepper. J. Field Robot. 2017, 34, 1123–1139. [Google Scholar] [CrossRef]
- Duan, J.; Wang, Z.; Ye, L.; Yang, Z. Research progress and development trend of motion planning of fruit picking robot arm. J. Intell. Agric. Mech. 2021, 2, 7–17. [Google Scholar]
- Jia, W.; Zhang, Y.; Lian, J.; Zheng, Y.; Zhao, D.; Li, C. Apple harvesting robot under information technology: A review. Int. J. Adv. Robot. Syst. 2020, 17, 255688461. [Google Scholar] [CrossRef]
- Ling, X.; Zhao, Y.; Gong, L.; Liu, C.; Wang, T. Dual-arm cooperation and implementing for robotic harvesting tomato using binocular vision. Robot. Auton. Syst. 2019, 114, 134–143. [Google Scholar] [CrossRef]
- Au, C.; Barnett, J.; Lim, S.H.; Duke, M. Workspace analysis of cartesian robot system for kiwifruit harvesting. Ind. Robot. 2020, 47, 503–510. [Google Scholar] [CrossRef]
- Tang, Y.; Chen, M.; Wang, C.; Luo, L.; Li, J.; Lian, G.; Zou, X. Recognition and localization methods for vision-based fruit picking robots: A review. Front. Plant Sci. 2020, 11, 510–521. [Google Scholar] [CrossRef]
- Cheng, X.; Song, X. Review on visual system for picking robots of fruits and vegetables. J. Zhejiang Agric. Sci. 2019, 60, 490–493. [Google Scholar]
- Silwal, A.; Davidson, J.R.; Karkee, M.; Mo, C.; Zhang, Q.; Lewis, K. Design, integration, and field evaluation of a robotic apple harvester. J. Field Robot. 2017, 34, 1140–1159. [Google Scholar] [CrossRef]
- Yuan, J. Research progress analysis of robotics selective harvesting technologies. Trans. Chin. Soc. Agric. Mach. 2020, 51, 1–17. [Google Scholar]
- Williams, H.; Ting, C.; Nejati, M. Improvements to and large-scale evaluation of a robotic kiwifruit harvester. J. Field. Robot. 2020, 37, 187–201. [Google Scholar] [CrossRef]
- Tibbetts, J.H. Agricultural disruption: New technology, consolidation, may yield production gains, job upheaval. BioScience 2019, 69, 237–243. [Google Scholar] [CrossRef]
- Xiong, Y.; Ge, Y.; Grimstad, L.; From, P.J. An autonomous strawberry harvesting robot: Design, development, integration, and field evaluation. J. Field Robot. 2019, 37, 202–224. [Google Scholar] [CrossRef]
- Zhao, D.; Wu, R.; Liu, X.; Zhang, X.; Ji, W. Design and Experiment of Apple Harvesting Robot Based on Gas-electric Hybrid Drive. Trans. Chin. Soc. Agric. Mach. 2020, 51, 21–28. [Google Scholar]
- Li, T.; Xie, F.; Zhao, Z.; Guo, X.; Feng, Q. A multi-arm robot system for efficient apple harvesting: Perception, task plan and control. Comput. Electron. Agric. 2023, 211, 107979. [Google Scholar] [CrossRef]
- Lin, G.; Tang, Y.; Zou, X. Fruit detection in natural environment using partial shape matching and probabilistic Hough transform. Precis. Agric. 2020, 21, 160–177. [Google Scholar] [CrossRef]
- Yan, B.; Li, X. RGB-D Camera and Fractal-Geometry-Based Maximum Diameter Estimation Method of Apples for Robot Intelligent Selective Graded Harvesting. Fract. Fract. 2024, 8, 649. [Google Scholar] [CrossRef]
- Jia, W.; Mou, S.; Wang, J. Fruit recognition based on pulse coupled neural network and genetic Elman algorithm application in apple harvesting robot. Int. J. Adv. Robot. Syst. 2020, 17, 255791245. [Google Scholar] [CrossRef]
- Zhao, B.; Guo, A.; Ma, R.; Zhang, Y.; Gong, J. YOLOv8s-CFB: A lightweight method for real-time detection of apple fruits in complex environments. J. Real-Time Image Process. 2024, 21, 1–13. [Google Scholar] [CrossRef]
- Jing, W.; Li, C.; Jing, X. Fruit identification with apple tree side view based on deep learning. Chin. Agric. Inf. 2019, 31, 75–83. [Google Scholar]
- Wang, F.; Tang, Y.; Gong, Z.; Jiang, J.; Chen, Y.; Xu, Q.; Hu, P.; Zhu, H. A lightweight Yunnan Xiaomila detection and pose estimation based on improved YOLOv8. Front. Plant Sci. 2024, 15, 1421381. [Google Scholar] [CrossRef]
- Xu, S.; Lu, K.; Pan, L.; Liu, T.; Zhou, Y.; Wang, B. 3D Reconstruction of Rape Branch and Pod Recognition Based on RGB-D Camera. Trans. Chin. Soc. Agric. Mach. 2019, 50, 21–27. [Google Scholar]
- Li, T.; Feng, Q.; Qiu, Q.; Xie, F.; Zhao, C. Occluded apple fruit detection and localization with a frustum-based point-cloud-processing approach for robotic harvesting. Remote Sens 2022, 14, 482. [Google Scholar] [CrossRef]
- Gene-Mola, J.; Sanz-Cortiella, R.; Rosell-Polo, J.R. Fruit detection and 3D location using instance segmentation neural networks and structure-from-motion photogrammetry. Comput. Electron. Agric. 2020, 169, 105165. [Google Scholar] [CrossRef]
- Gene-Mola, J.; Sanz-Cortiella, R.; Rosell-Polo, J.R. In-field apple size estimation using photogrammetry-derived 3D point clouds: Comparison of 4 different methods considering fruit occlusions. Comput. Electron. Agric. 2021, 188, 106343. [Google Scholar] [CrossRef]
- Hu, T.; Wang, W.; Gu, J.; Xia, Z.; Zhang, J.; Wang, B. Research on apple object detection and localization method based on improved yolox and rgb-d images. Agronomy 2023, 13, 1816. [Google Scholar] [CrossRef]
- Bac, C.W.; Hemming, J.; van Tuijl, B.A.J.; Barth, R.; Wais, E.; van Henten, E.J. Harvesting robots for high-value crops: State-of-the-art review and challenges ahead. J. Field Robot. 2014, 31, 888–911. [Google Scholar] [CrossRef]
- Zhang, S. Control Method of Dual Arm Picking Robot for Kiwifruit. Ph.D. Thesis, North West Agriculture and Forestry University, Xianyang, China, 2018. [Google Scholar]
- Williams, H.A.M.; Jones, M.H.; Nejati, M. Robotic kiwifruit harvesting using machine vision, convolutional neural networks, and aobotic arms. Biosyst. Eng. 2019, 181, 140–156. [Google Scholar] [CrossRef]
- Barnett, J.; Duke, M.; Au, C.K.; Lim, S.H. Work distribution of multiple cartesian robot arms for kiwifruit harvesting. Comput. Electron. Agric. 2020, 169, 105202. [Google Scholar] [CrossRef]
- Mann, M.P.; Zion, B.; Shmulevich, I.; Rubinstein, D.; Linker, R. Combinatorial optimization and performance analysis of a multi-arm cartesian robotic fruit harvester-extensions of graph coloring. J. Intell. Robot. Syst. 2016, 82, 399–411. [Google Scholar] [CrossRef]
- Li, T.; Qiu, Q.; Zhao, C. Task planning of multi-arm harvesting robots for high-density dwarf orchards. Trans. Chin. Soc. Agric. Eng. 2021, 37, 1–10. [Google Scholar]
- Sun, L.; Yu, X.; Guo, J.; Yan, Y.; Yu, X. Deep reinforcement learning for task assignment in spatial crowdsourcing and sensing. IEEE Sens. J. 2021, 21, 25323–25330. [Google Scholar] [CrossRef]
- Jiang, Z. Research on the Precise Picking Robot of High-Quality Tea Sprout with Multi-Arm Coordination. Ph.D. Thesis, Shandong University, Jinan, China, 2022. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tree ID | Quantity of Fruits | Harvested Fruits | Harvest Success Rate (%) | Total Time Cost (s) | Average Time Cost per Fruit (s) |
|---|---|---|---|---|---|
| Tree 1 | 28 | 22 | 78.57 | 156 | 7.09 |
| Tree 2 | 32 | 25 | 78.13 | 183 | 7.32 |
| Tree 3 | 30 | 23 | 76.67 | 165 | 7.17 |
| Tree 4 | 31 | 25 | 80.64 | 178 | 7.12 |
| Tree 5 | 35 | 28 | 80.00 | 202 | 7.21 |
| Tree 6 | 27 | 20 | 74.07 | 148 | 7.40 |
| Tree 7 | 29 | 21 | 72.41 | 146 | 6.95 |
| Tree 8 | 30 | 22 | 73.33 | 172 | 7.82 |
| Tree 9 | 34 | 27 | 79.41 | 198 | 7.33 |
| Tree 10 | 28 | 21 | 75.00 | 157 | 7.47 |
| Totals | 304 | 234 | 76.97 | 1705 | 7.29 |
| Failed Fruits | Recognition and Localization Error | Obstacle Obstruction | Grasp Failure | Separation Failure |
|---|---|---|---|---|
| 70 | 28 (30%) | 24 (11.43%) | 13 (37.14%) | 5 (11.43%) |
| Damage Condition | Evaluation Criteria | Quantity | Percentage (%) |
|---|---|---|---|
| Intact and Undamaged | Stem Intact and Undamaged | 221 | 94.44 |
| Stem Missing | Stem Missing | 9 | 3.85 |
| Intact but Slightly Damaged Peel | Stem Intact and Damage Area ≤ 1 cm2 | 3 | 1.28 |
| Intact but Severely Damaged Peel | Stem Intact and Damage Area > 1 cm2 | 1 | 0.43 |
| Version | Harvest Success Rate (%) | Average Time Cost per Fruit (s) | Damage Rate (%) |
|---|---|---|---|
| The latest dual-arm harvesting robot | 76.97 | 7.29 | 5.56 |
| The previous single-arm harvesting robot | 65.85 | 9.78 | 10.28 |
| The previous four-arm harvesting robot | 72.69 | 8.06 | 9.85 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, W.; Miao, Z.; Wu, T.; Guo, Z.; Han, W.; Li, T. Design of and Experiment with a Dual-Arm Apple Harvesting Robot System. Horticulturae 2024, 10, 1268. https://doi.org/10.3390/horticulturae10121268
Huang W, Miao Z, Wu T, Guo Z, Han W, Li T. Design of and Experiment with a Dual-Arm Apple Harvesting Robot System. Horticulturae. 2024; 10(12):1268. https://doi.org/10.3390/horticulturae10121268
Chicago/Turabian StyleHuang, Wenlei, Zhonghua Miao, Tao Wu, Zhengwei Guo, Wenkai Han, and Tao Li. 2024. "Design of and Experiment with a Dual-Arm Apple Harvesting Robot System" Horticulturae 10, no. 12: 1268. https://doi.org/10.3390/horticulturae10121268
APA StyleHuang, W., Miao, Z., Wu, T., Guo, Z., Han, W., & Li, T. (2024). Design of and Experiment with a Dual-Arm Apple Harvesting Robot System. Horticulturae, 10(12), 1268. https://doi.org/10.3390/horticulturae10121268