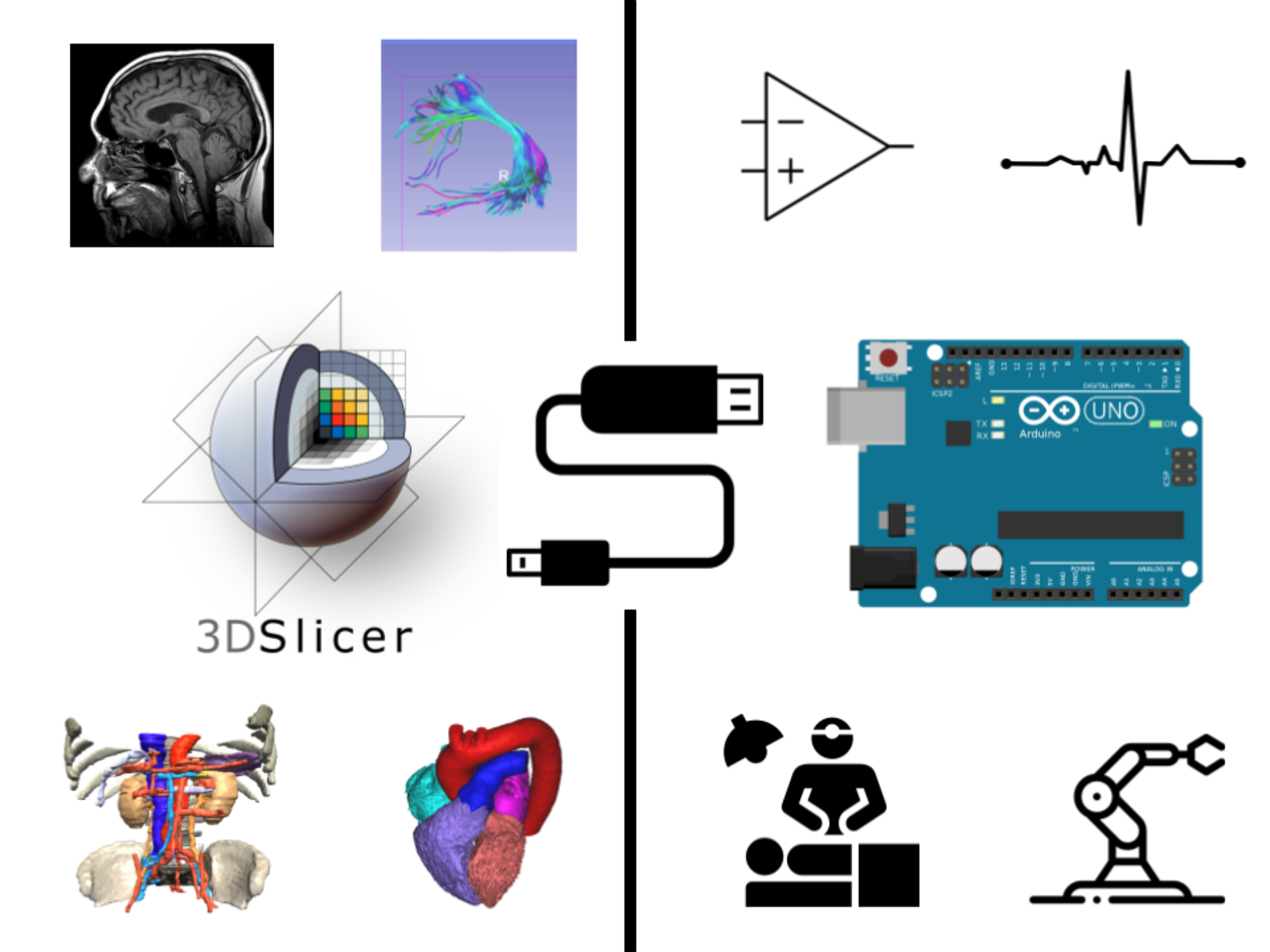
SlicerArduino: A Bridge between Medical Imaging Platform and Microcontroller

 ,
,  ,
, 
 and
and
Abstract
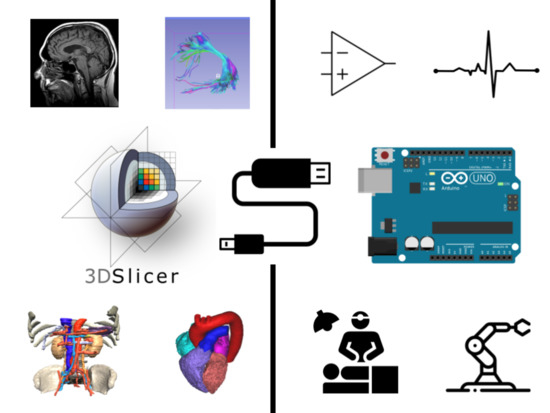
1. Introduction
2. Materials and Methods
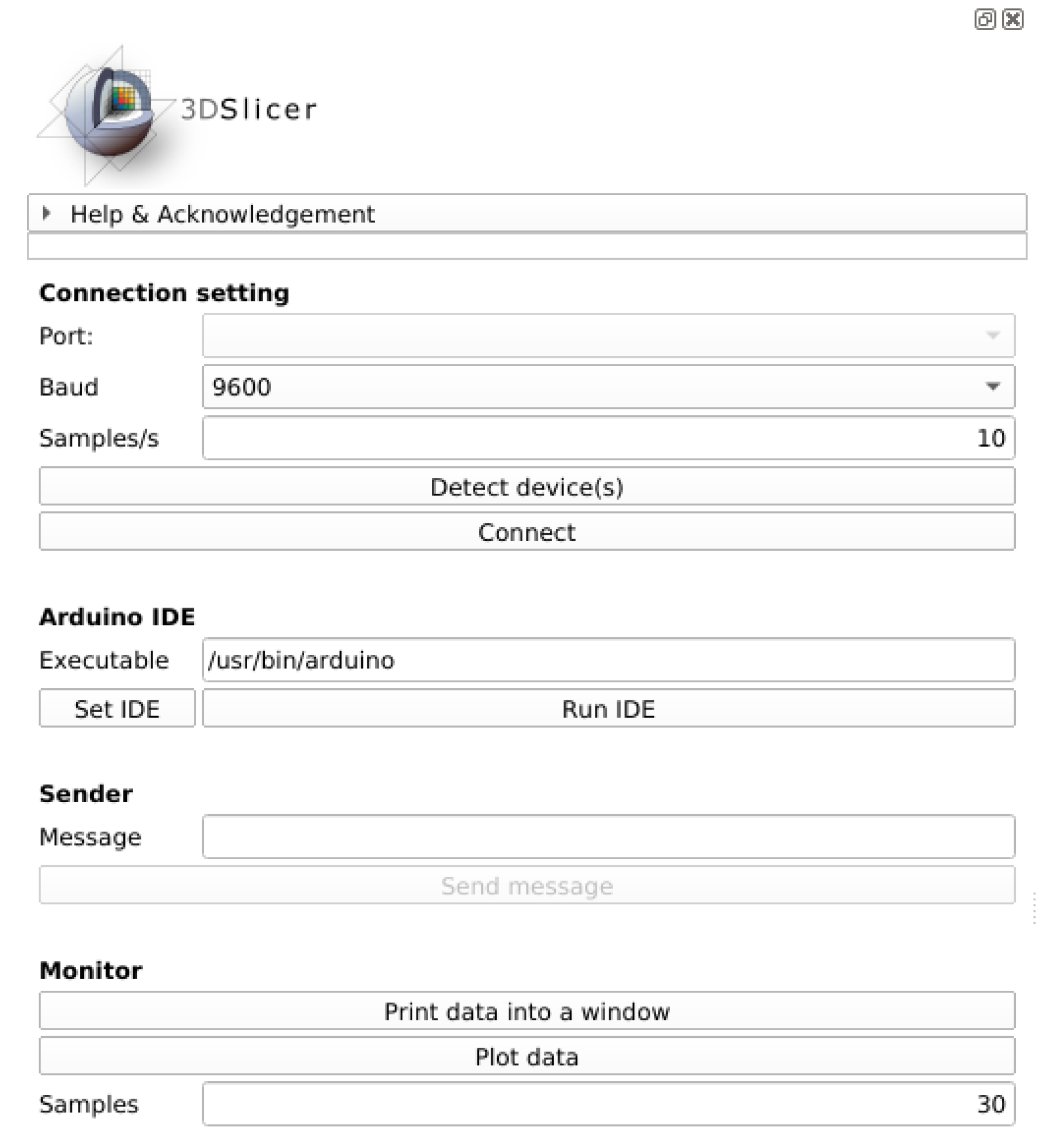
2.1. General Extension Description
- Connection setting: In this section, it is possible to set the serial port for communicating with the Arduino board, the baud rate, and the sampling frequency used to interrogate the buffer. Once these parameters are defined, it is possible to connect/disconnect the device. The list of the available serial ports is dynamically created by inspecting the connected hardware.
- Arduino IDE: As it could be necessary to reprogram the board, the Arduino IDE can be run directly from Slicer. The extension automatically searches for the IDE executable in the system path or, alternatively, it can be manually set. Once the path is defined, it will be made persistent until a new choice is made.
- Sender: If a connection is established, by using this section is possible to send text string to the board.
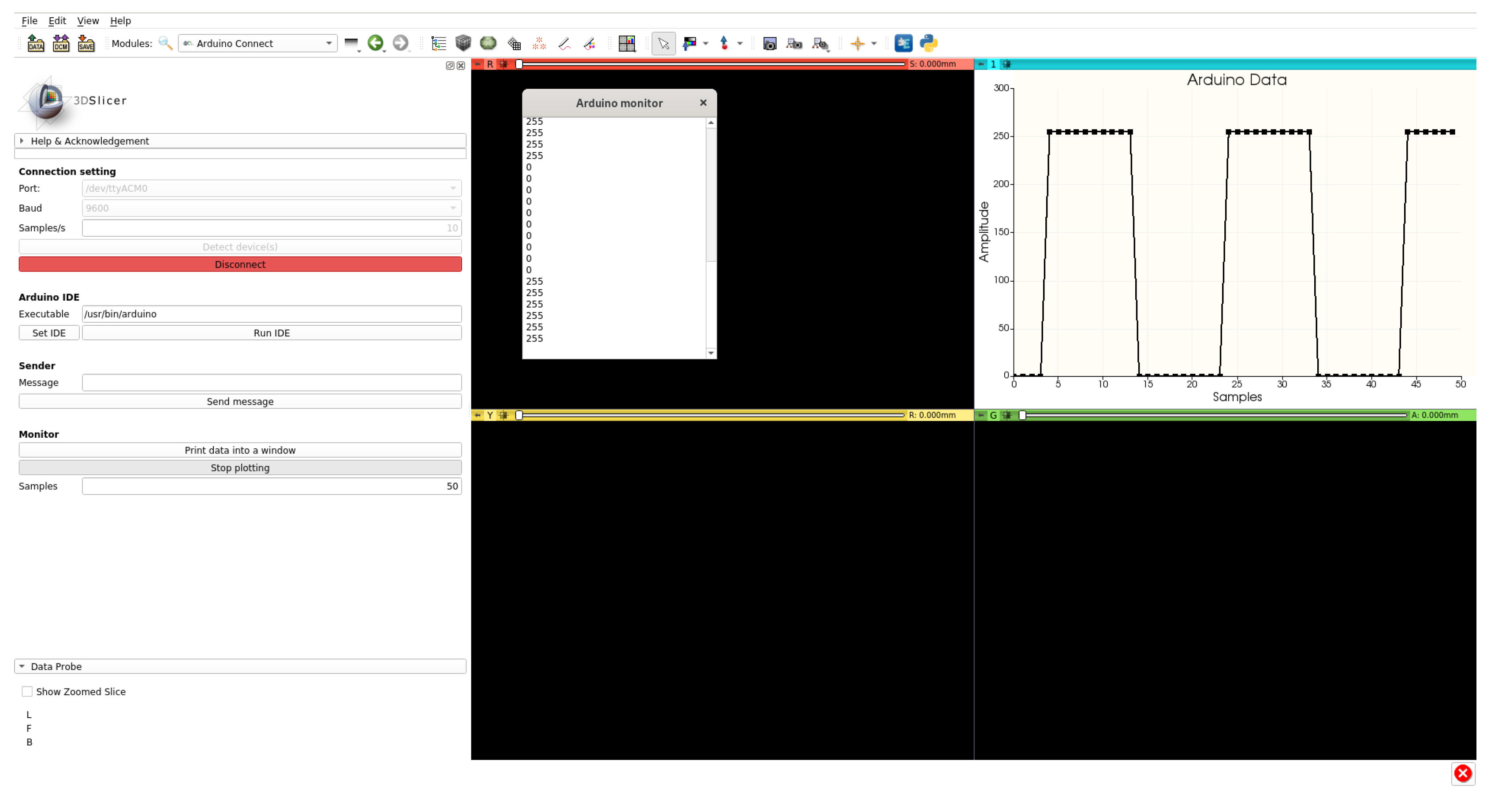
- Monitor: Data coming from the board can be inspected in real-time. If the data stream contains characters and/or numbers, they can be shown in a dedicated window. If the data stream is made only of numbers, they can be plotted by taking advantage of the Slicer plotting infrastructure. The amount of samples to plot can be defined by the user. Monitoring the stream does not interfere with the other tasks that use Arduino data.
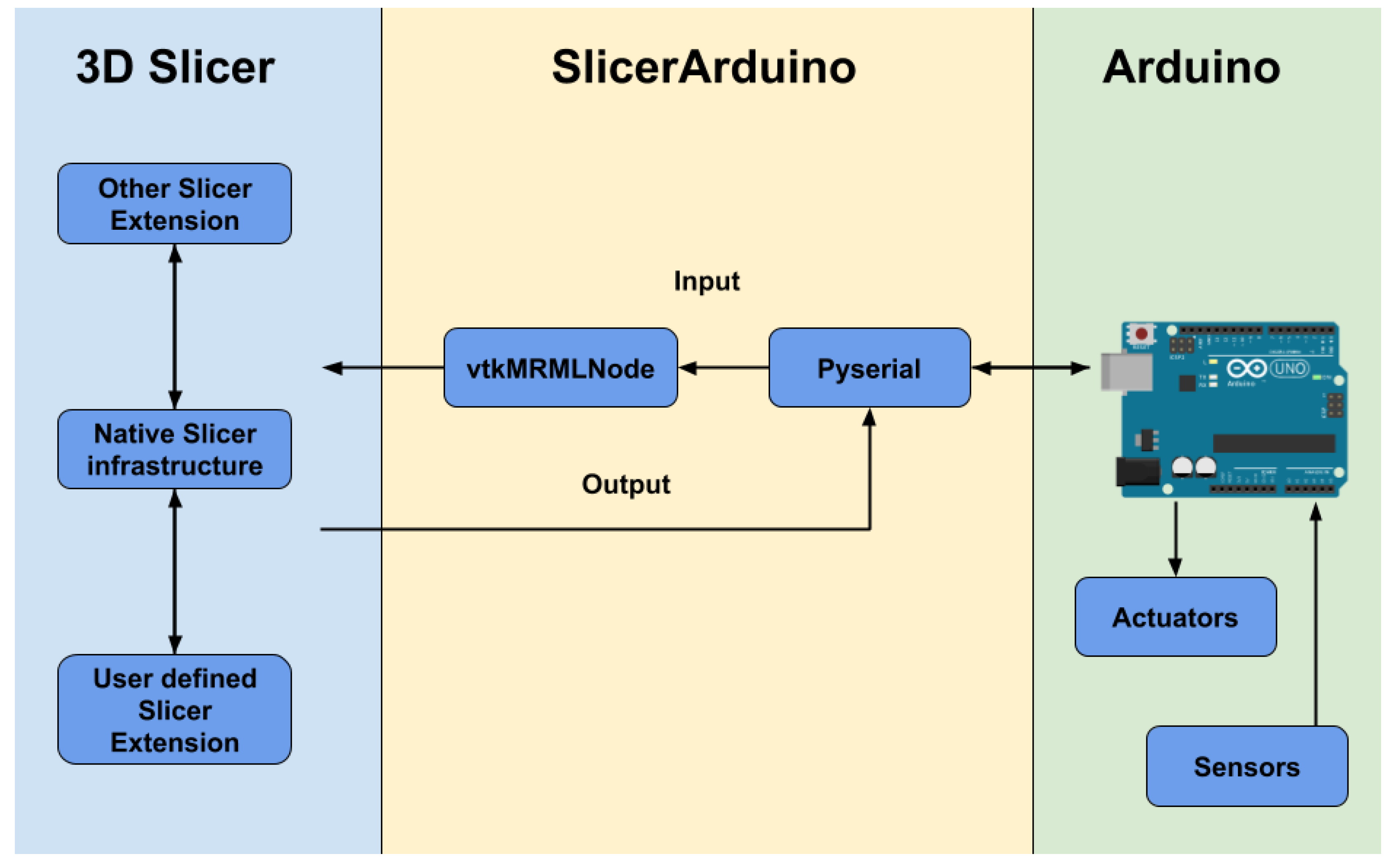
2.2. Slicer Integration
2.3. Exemplary Use Cases
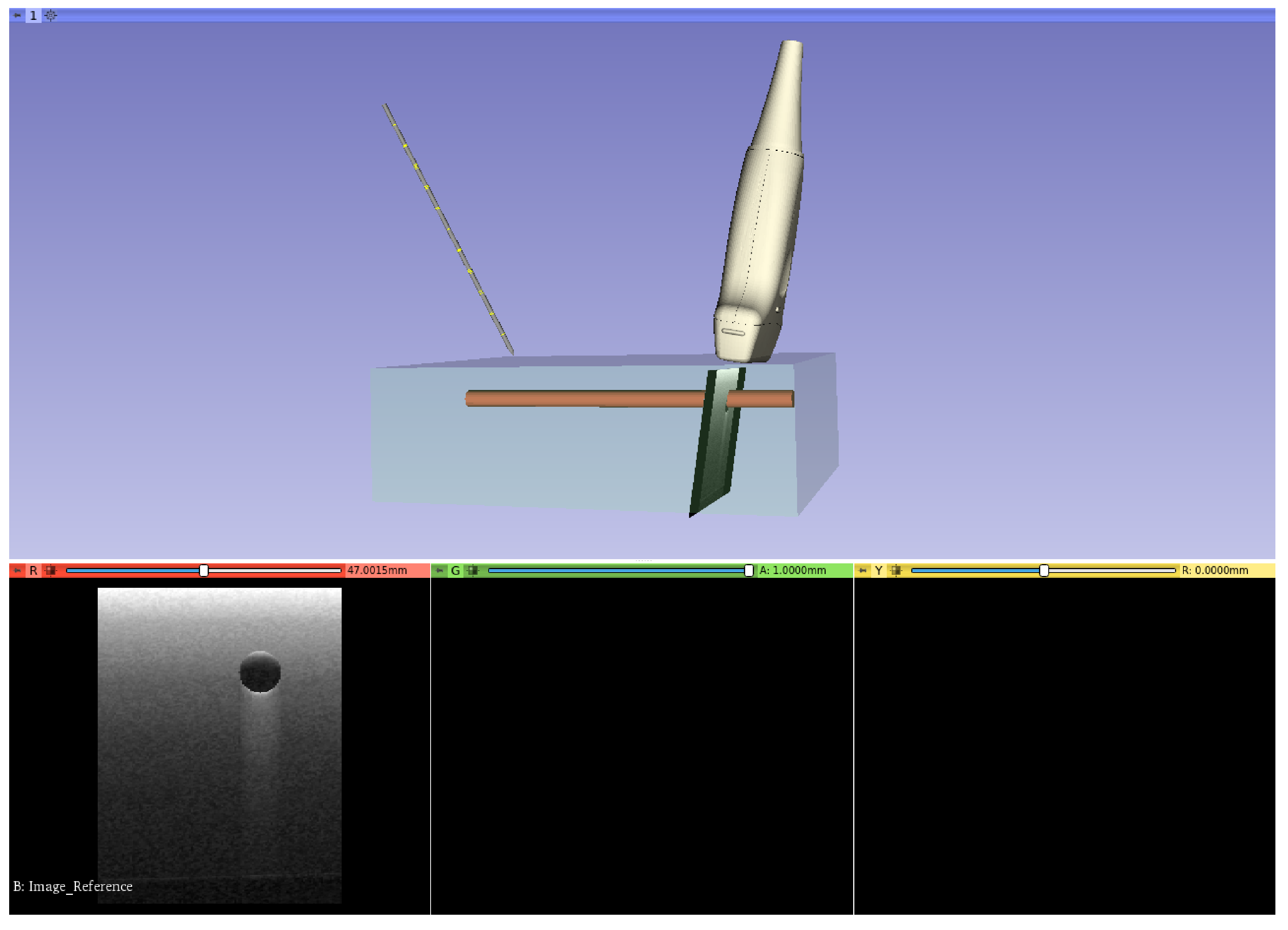
2.3.1. From External Environment to Medical Imaging Platform
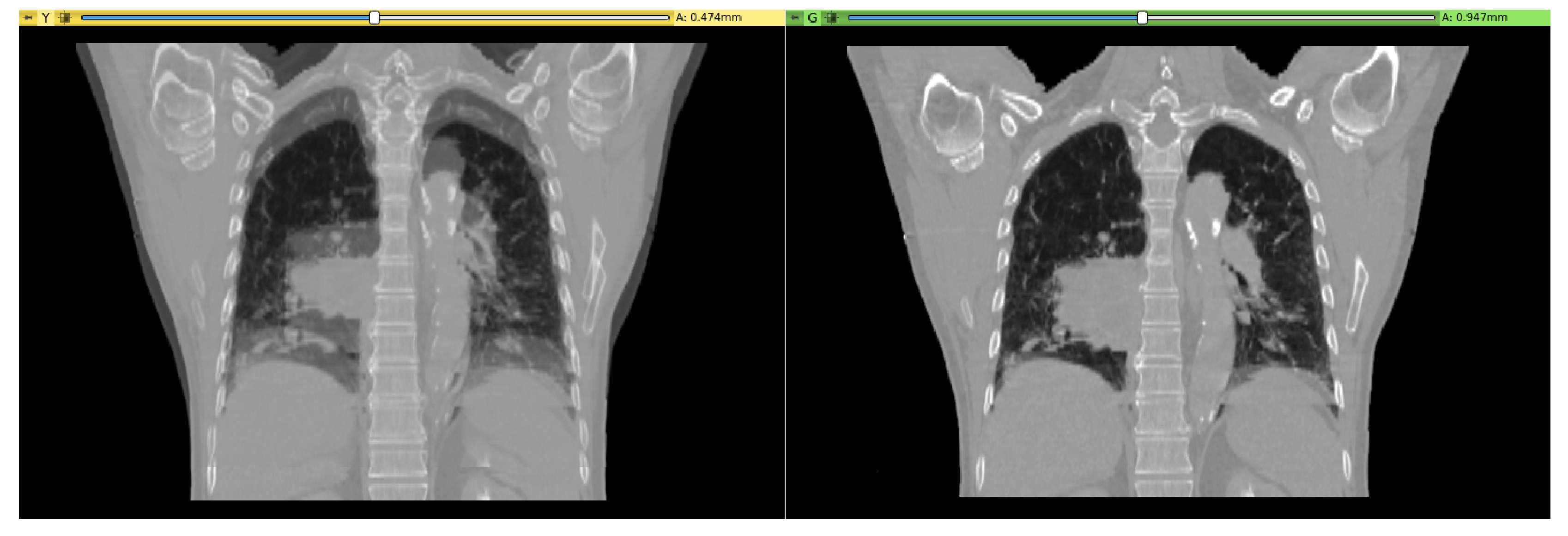
2.3.2. From Medical Imaging Platform to External Environment
3. Results
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Tabrizi, L.B.; Mahvash, M. Augmented reality–guided neurosurgery: Accuracy and intraoperative application of an image projection technique. J. Neurosurg. 2015, 123, 206–211. [Google Scholar] [CrossRef] [PubMed]
- Pelargos, P.E.; Nagasawa, D.T.; Lagman, C.; Tenn, S.; Demos, J.V.; Lee, S.J.; Bui, T.T.; Barnette, N.E.; Bhatt, N.S.; Ung, N.; et al. Utilizing virtual and augmented reality for educational and clinical enhancements in neurosurgery. J. Clin. Neurosci. 2017, 35, 1–4. [Google Scholar] [CrossRef] [PubMed]
- Peterhans, M.; vom Berg, A.; Dagon, B.; Inderbitzin, D.; Baur, C.; Candinas, D.; Weber, S. A navigation system for open liver surgery: Design, workflow and first clinical applications. Int. J. Med Robot. Comput. Assist. Surg. 2011, 7, 7–16. [Google Scholar] [CrossRef] [PubMed]
- Ebert, L.C.; Flach, P.M.; Thali, M.J.; Ross, S. Out of touch—A plugin for controlling OsiriX with gestures using the leap controller. J. Forensic Radiol. Imaging 2014, 2, 126–128. [Google Scholar] [CrossRef]
- Wipfli, R.; Dubois-Ferrière, V.; Budry, S.; Hoffmeyer, P.; Lovis, C. Gesture-controlled image management for operating room: A randomized crossover study to compare interaction using gestures, mouse, and third person relaying. PLoS ONE 2016, 11, e0153596. [Google Scholar] [CrossRef] [PubMed]
- Patete, P.; Riboldi, M.; Spadea, M.F.; Catanuto, G.; Spano, A.; Nava, M.; Baroni, G. Motion compensation in hand-held laser scanning for surface modeling in plastic and reconstructive surgery. Ann. Biomed. Eng. 2009, 37, 1877–1885. [Google Scholar] [CrossRef] [PubMed]
- Achenbach, S.; Goroll, T.; Seltmann, M.; Pflederer, T.; Anders, K.; Ropers, D.; Daniel, W.G.; Uder, M.; Lell, M.; Marwan, M. Detection of coronary artery stenoses by low-dose, prospectively ECG-triggered, high-pitch spiral coronary CT angiography. JACC Cardiovasc. Imaging 2011, 4, 328–337. [Google Scholar] [CrossRef] [PubMed]
- Gianoli, C.; Riboldi, M.; Spadea, M.F.; Travaini, L.L.; Ferrari, M.; Mei, R.; Orecchia, R.; Baroni, G. A multiple points method for 4D CT image sorting. Med. Phys. 2011, 38, 656–667. [Google Scholar] [CrossRef] [PubMed]
- Spadea, M.F.; Baroni, G.; Gierga, D.P.; Turcotte, J.C.; Chen, G.T.; Sharp, G.C. Evaluation and commissioning of a surface based system for respiratory sensing in 4D CT. J. Appl. Clin. Med. Phys. 2011, 12, 162–169. [Google Scholar] [CrossRef] [PubMed]
- Buzurovic, I.; Huang, K.; Yu, Y.; Podder, T. A robotic approach to 4D real-time tumor tracking for radiotherapy. Phys. Med. Biol. 2011, 56, 1299. [Google Scholar] [CrossRef] [PubMed]
- Buzurovic, I.; Yu, Y.; Werner-Wasik, M.; Biswas, T.; Anne, P.; Dicker, A.; Podder, T. Implementation and experimental results of 4D tumor tracking using robotic couch. Med. Phys. 2012, 39, 6957–6967. [Google Scholar] [CrossRef]
- Pieper, S.; Halle, M.; Kikinis, R. 3D Slicer. In Proceedings of the 2004 2nd IEEE International Symposium on BIOMEDICAL Imaging: Nano to Macro (IEEE Cat No. 04EX821), Arlington, VA, USA, 18 April 2004; IEEE: Piscataway, NJ, USA, 2004; pp. 632–635. [Google Scholar]
- Fedorov, A.; Beichel, R.; Kalpathy-Cramer, J.; Finet, J.; Fillion-Robin, J.C.; Pujol, S.; Bauer, C.; Jennings, D.; Fennessy, F.; Sonka, M.; et al. 3D Slicer as an image computing platform for the Quantitative Imaging Network. Magn. Reson. Imaging 2012, 30, 1323–1341. [Google Scholar] [CrossRef] [PubMed]
- Kikinis, R.; Pieper, S.D.; Vosburgh, K.G. 3D Slicer: A platform for subject-specific image analysis, visualization, and clinical support. In Intraoperative Imaging and Image-Guided Therapy; Springer: New York, NY, USA, 2014; pp. 277–289. [Google Scholar]
- McCormick, M.M.; Liu, X.; Ibanez, L.; Jomier, J.; Marion, C. ITK: Enabling reproducible research and open science. Front. Neuroinform. 2014, 8, 13. [Google Scholar] [CrossRef] [PubMed]
- Schroeder, W.; Martin, K.; Lorensen, B. The Visualization Toolkit, 4th ed.; Kitware: Clifton Park, NY, USA, 2006. [Google Scholar]
- Available online: http://www.qt.io/ (accessed on 1 September 2020).
- Tokuda, J.; Fischer, G.S.; Papademetris, X.; Yaniv, Z.; Ibanez, L.; Cheng, P.; Liu, H.; Blevins, J.; Arata, J.; Golby, A.J.; et al. OpenIGTLink: An open network protocol for image-guided therapy environment. Int. J. Med. Robot. Comput. Assist. Surg. 2009, 5, 423–434. [Google Scholar] [CrossRef] [PubMed]
- Lasso, A.; Heffter, T.; Rankin, A.; Pinter, C.; Ungi, T.; Fichtinger, G. PLUS: Open-source toolkit for ultrasound-guided intervention systems. IEEE Trans. Biomed. Eng. 2014, 61, 2527–2537. [Google Scholar] [CrossRef] [PubMed]
- Badamasi, Y.A. The working principle of an Arduino. In Proceedings of the 2014 11th international conference on electronics, computer and computation (ICECCO), Abuja, Nigeria, 29 September–1 October 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–4. [Google Scholar]
- D’Ausilio, A. Arduino: A low-cost multipurpose lab equipment. Behav. Res. Methods 2012, 44, 305–313. [Google Scholar] [CrossRef] [PubMed]
- Available online: https://github.com/pyserial/pyserial (accessed on 1 September 2020).
- Available online: https://github.com/pzaffino/SlicerArduinoController (accessed on 1 September 2020).
- Kapur, T.; Pieper, S.; Fedorov, A.; Fillion-Robin, J.C.; Halle, M.; O’Donnell, L.; Lasso, A.; Ungi, T.; Pinter, C.; Finet, J.; et al. Increasing the impact of medical image computing using community-based open-access hackathons: The NA-MIC and 3D Slicer experience. Med. Image Anal. 2016, 33, 176–180. [Google Scholar] [CrossRef] [PubMed]
- Available online: https://pzaffino.github.io/SlicerArduinoController/ (accessed on 1 September 2020).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Polling Frequency (Hz) | Mean (ms) | Standard Deviation (ms) |
|---|---|---|
| 50 | 20.0 | 2.4 |
| 100 | 17.4 | 1.7 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zaffino, P.; Merola, A.; Leuzzi, D.; Sabatino, V.; Cosentino, C.; Spadea, M.F. SlicerArduino: A Bridge between Medical Imaging Platform and Microcontroller. Bioengineering 2020, 7, 109. https://doi.org/10.3390/bioengineering7030109
Zaffino P, Merola A, Leuzzi D, Sabatino V, Cosentino C, Spadea MF. SlicerArduino: A Bridge between Medical Imaging Platform and Microcontroller. Bioengineering. 2020; 7(3):109. https://doi.org/10.3390/bioengineering7030109
Chicago/Turabian StyleZaffino, Paolo, Alessio Merola, Domenico Leuzzi, Virgilio Sabatino, Carlo Cosentino, and Maria Francesca Spadea. 2020. "SlicerArduino: A Bridge between Medical Imaging Platform and Microcontroller" Bioengineering 7, no. 3: 109. https://doi.org/10.3390/bioengineering7030109
APA StyleZaffino, P., Merola, A., Leuzzi, D., Sabatino, V., Cosentino, C., & Spadea, M. F. (2020). SlicerArduino: A Bridge between Medical Imaging Platform and Microcontroller. Bioengineering, 7(3), 109. https://doi.org/10.3390/bioengineering7030109