

Finger-Individuating Exoskeleton System with Non-Contact Leader–Follower Control Strategy

 , , and
, , and
Abstract

1. Introduction
2. Materials and Methods
2.1. Related Work
- Transmission Method
- 2.
- Single-Joint Precision Assistance
- 3.
- Actuator
- 4.
- Wearing Method
- 5.
- Control Strategies
2.2. Design Philosophy of This Research
- Exoskeleton Design
- 2.
- Motion Control Strategy
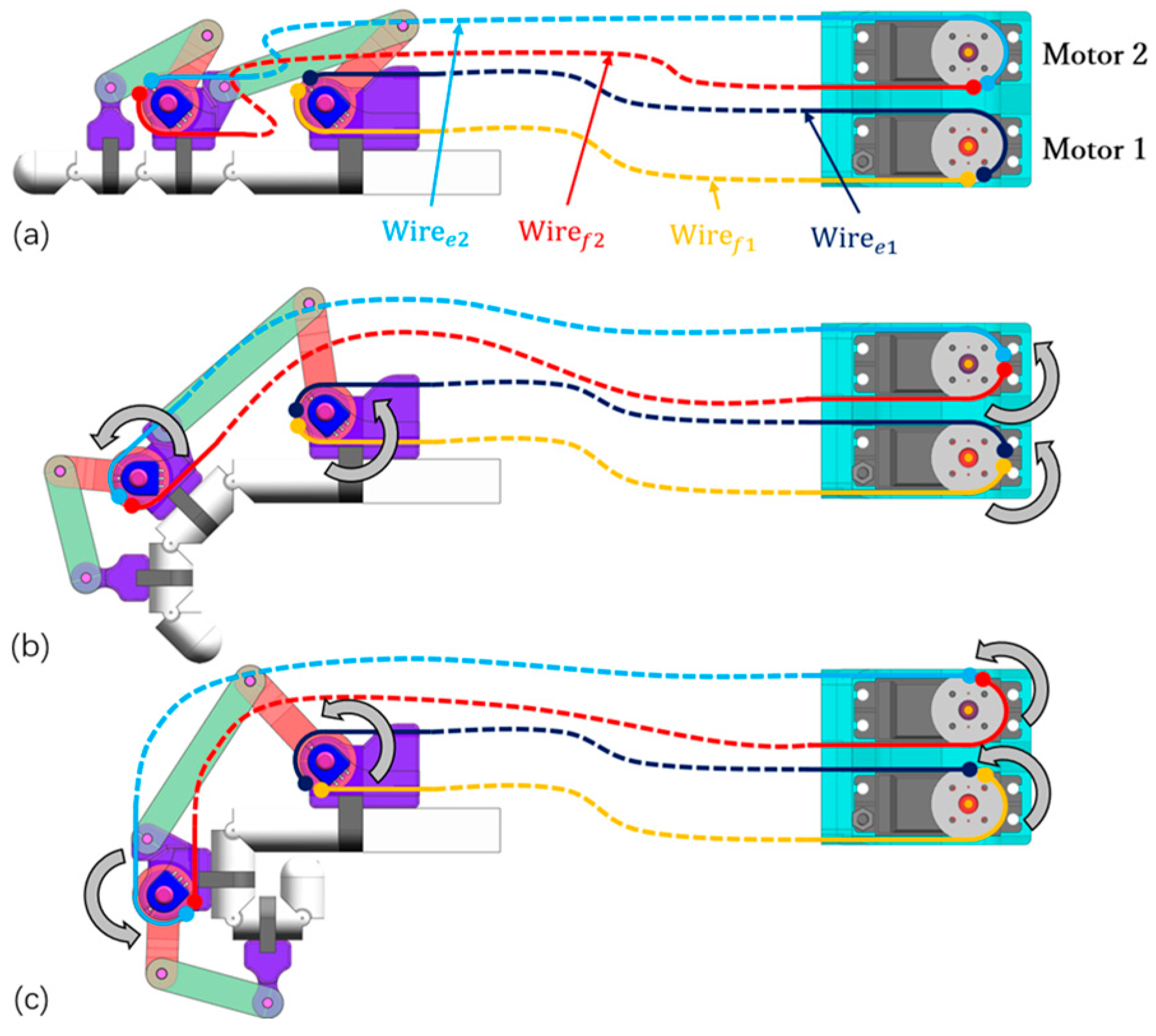
2.3. Finger-Individuating Exoskeleton Mechanism
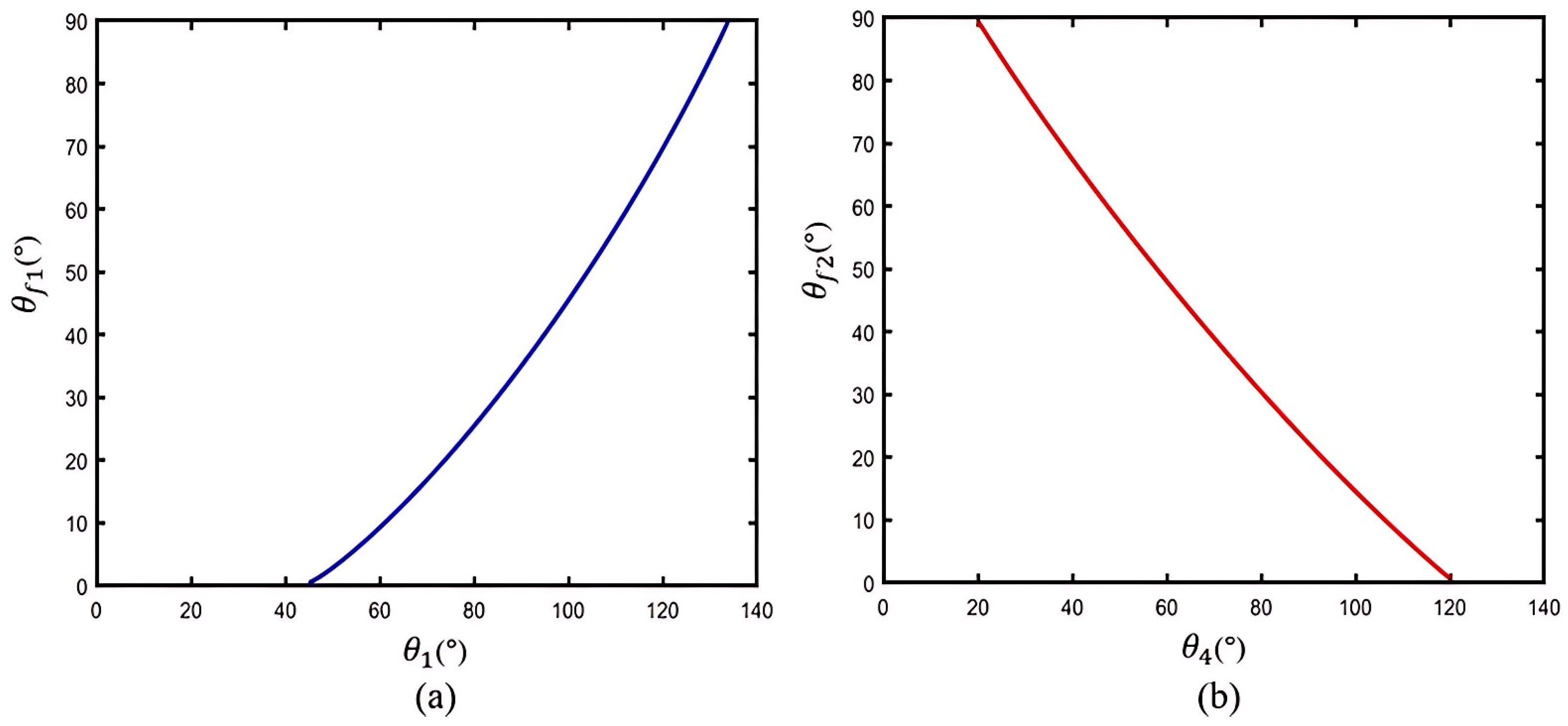
2.4. Mechanical Parameters
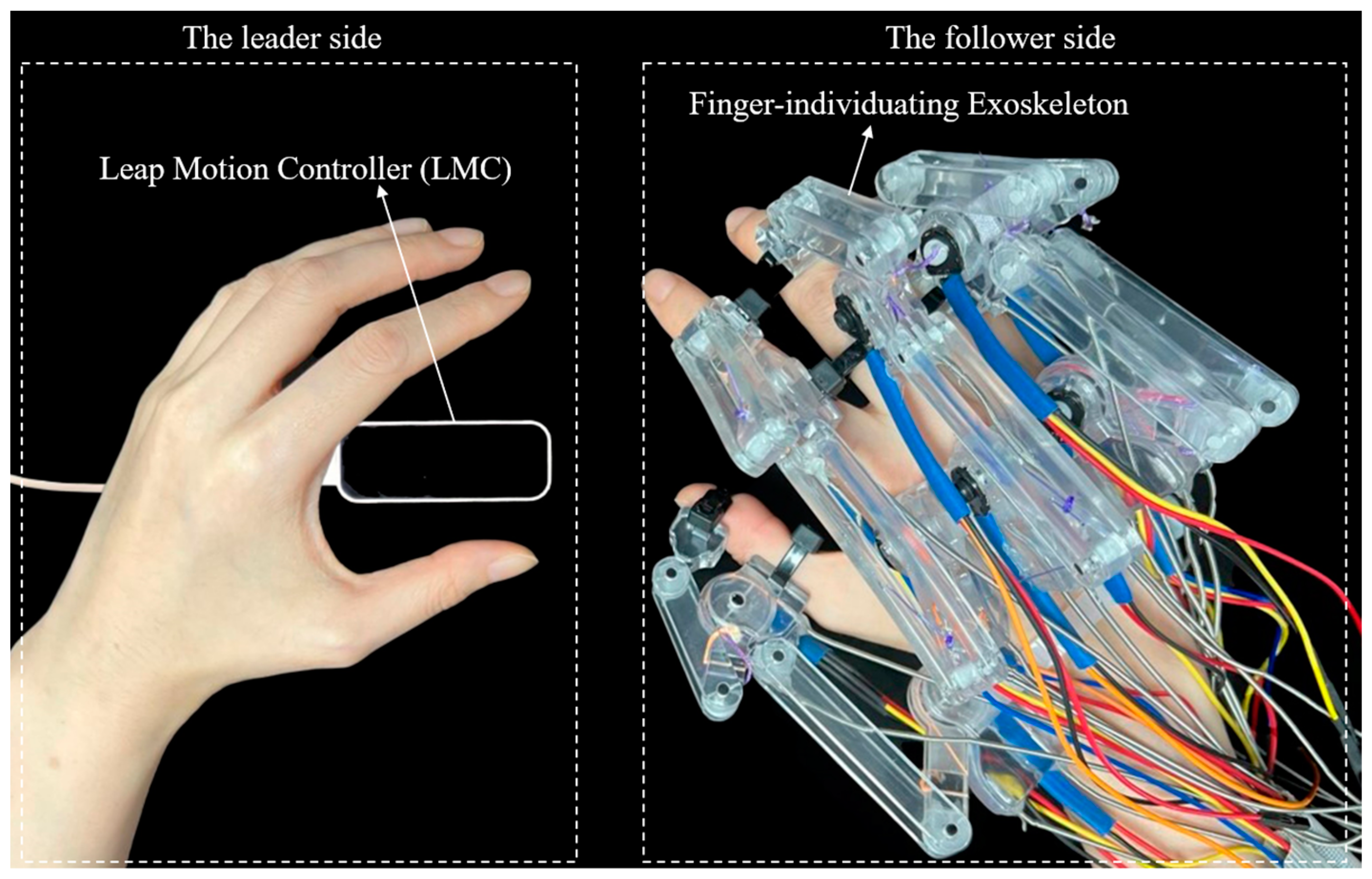
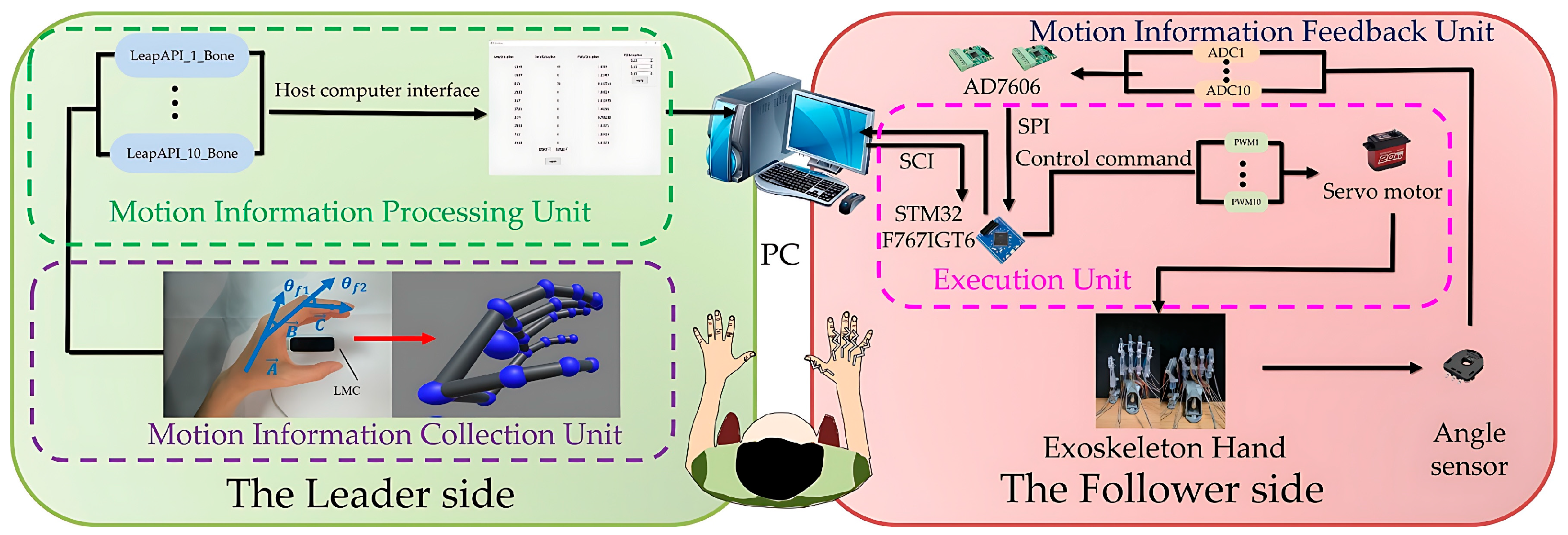
2.5. Non-Contact Leader–Follower Control Strategy
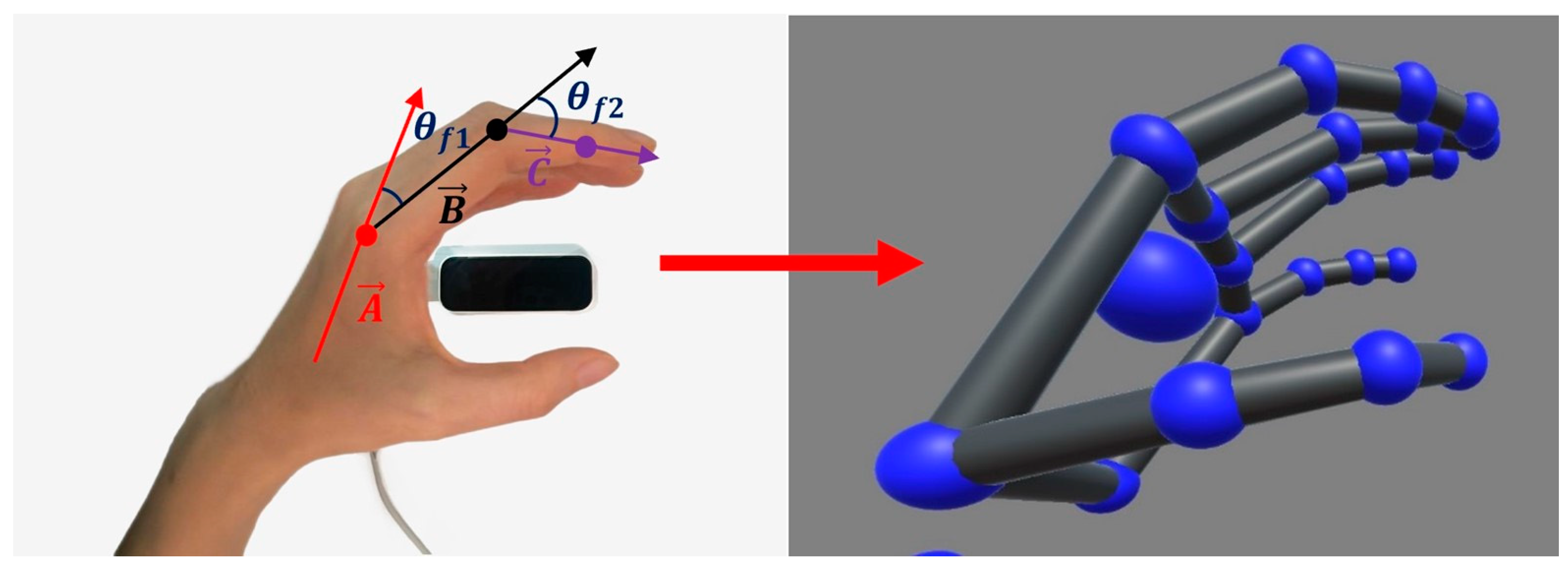
2.5.1. Leader Side
2.5.2. Follower Side
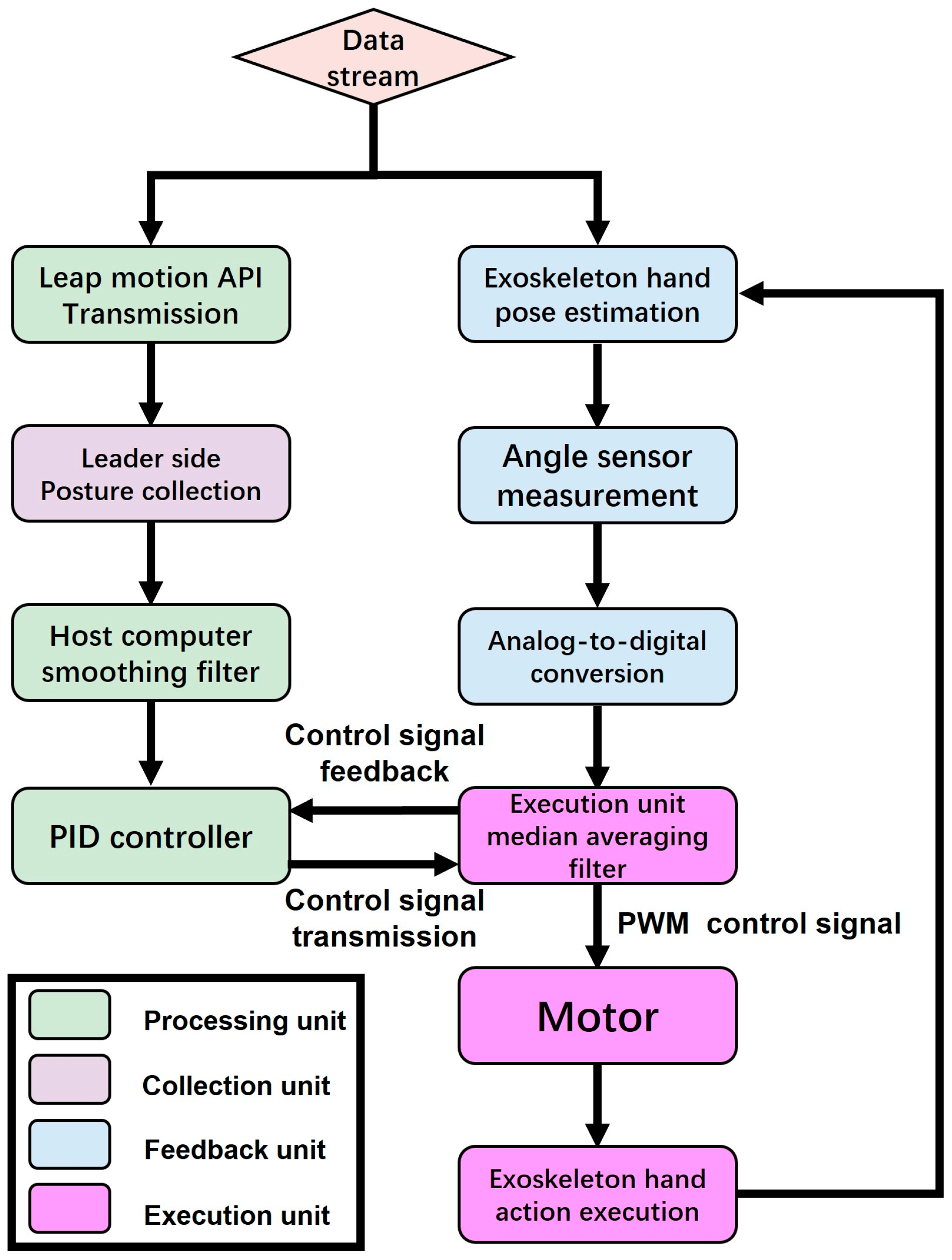
2.5.3. Control Flow Chart
3. Results
3.1. Experiment
3.1.1. Flow Chart of the Experiments
3.1.2. Experiments for a Single Finger
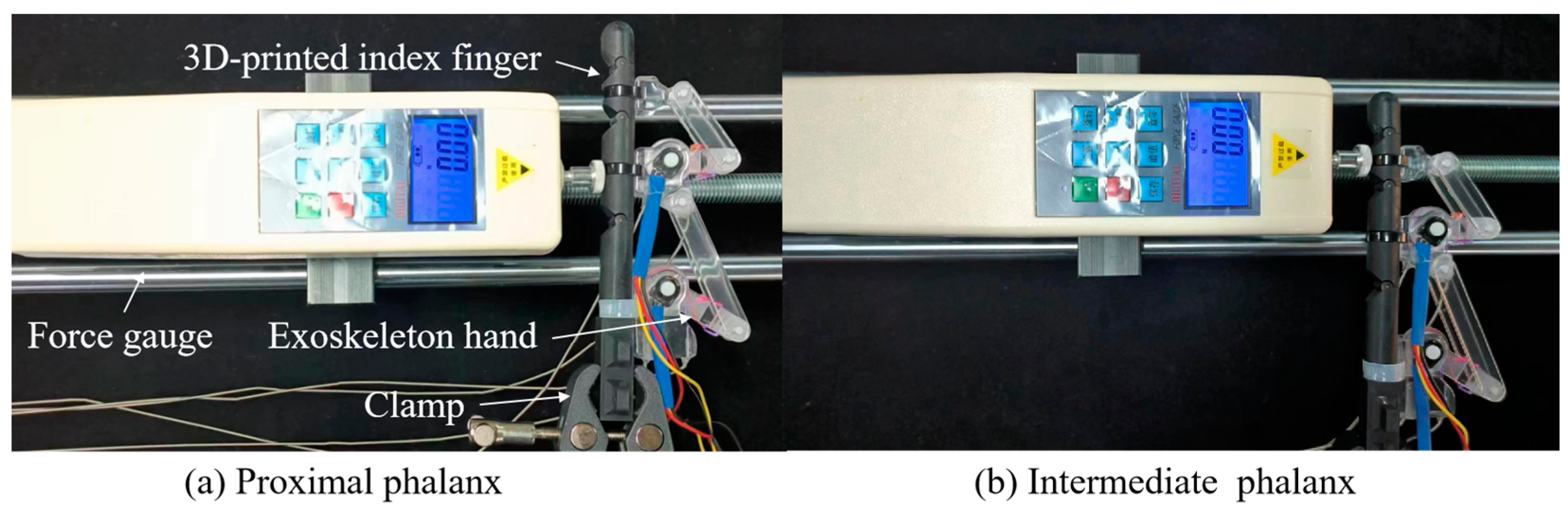
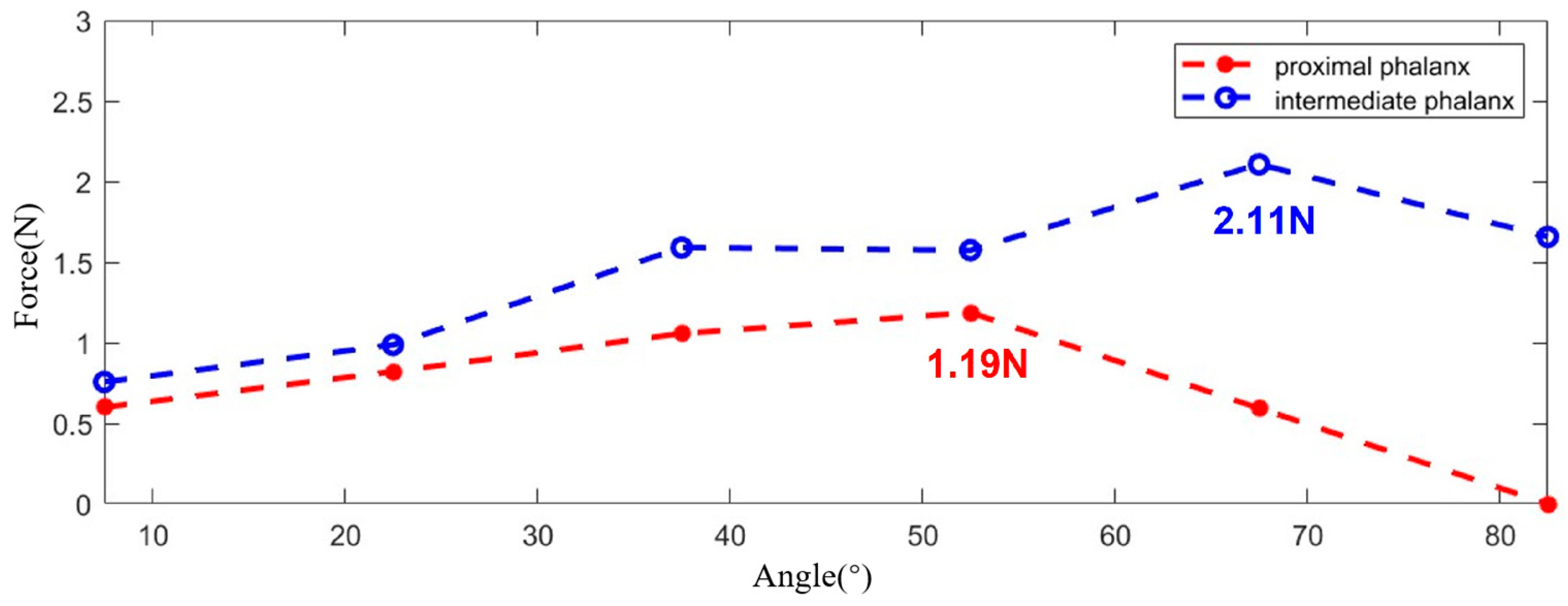
- Output Force
- 2.
- Control Accuracy
3.1.3. Experiments for the Whole Hand
- Assistive ROM
- 2.
- Grasping Performance
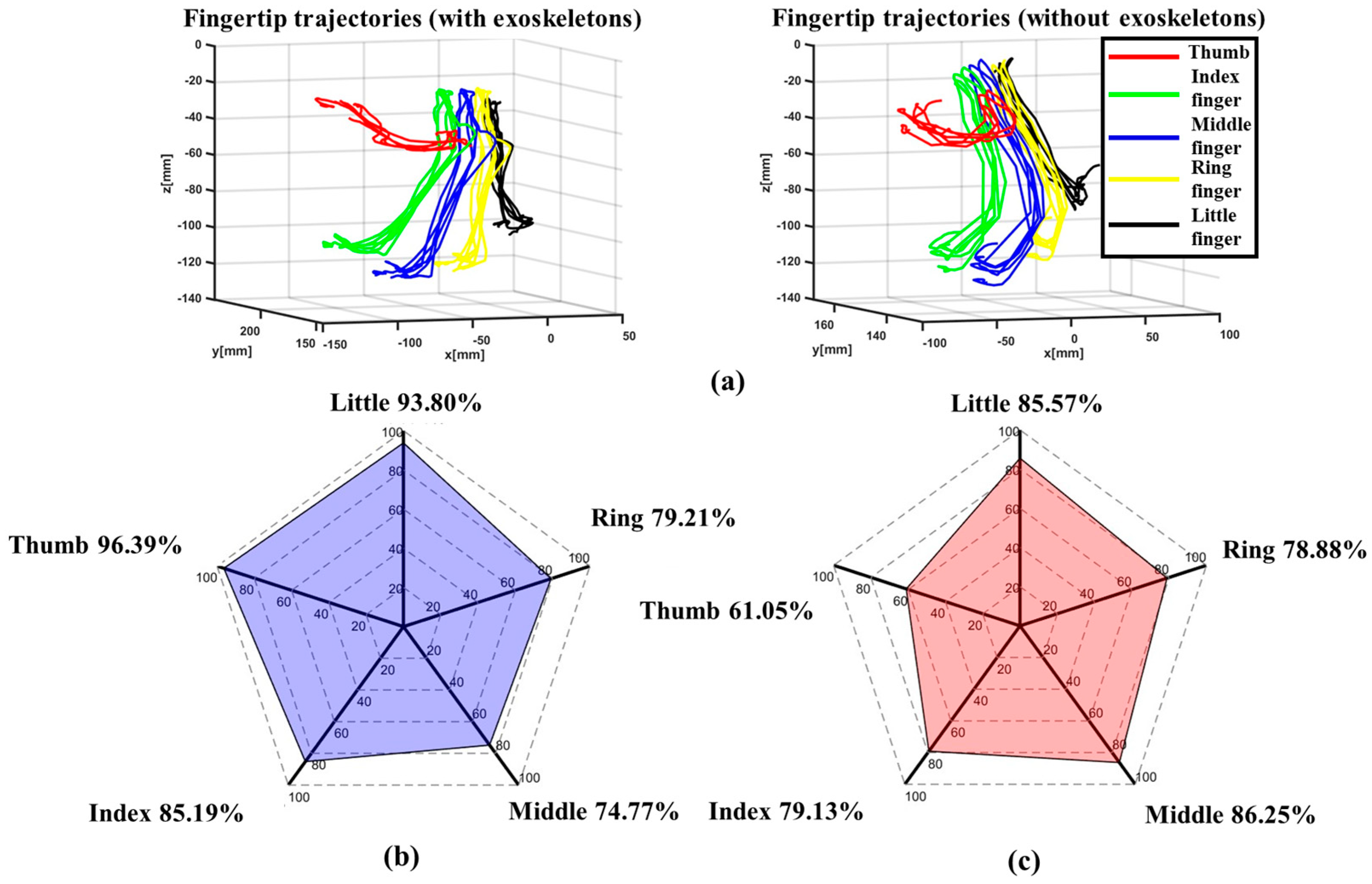
- Average Generated Force: The system generates an average force of 16.5 N across all five fingers, which is optimal for hand flexion and rehabilitation exercises.
- Control Accuracy: The exoskeleton replicates the movements of a healthy hand with minimal error margins, ensuring reliable assistance for patients.
- Assistive Range of Motion (ROM): The assistive ROM for the MCP and PIP joints averaged 82.03% of the natural human hand’s ROM, supporting extensive finger movements.
- Grasping Performance: The exoskeleton achieved a success rate consistently above 90% in grasping tasks, even with varying object shapes and sizes.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mayer, T.K. One-handed in a two-handed world. Top. Stroke Rehabil. 2000, 7, 50–56. [Google Scholar] [CrossRef]
- Gandolfi, M.; Donisi, V.; Battista, S.; Picelli, A.; Valè, N.; Del Piccolo, L.; Smania, N. Health-Related Quality of Life and Psychological Features in Post-Stroke Patients with Chronic Pain: A Cross-Sectional Study in the Neuro-Rehabilitation Context of Care. Int. J. Environ. Res. Public Health 2021, 18, 3089. [Google Scholar] [CrossRef] [PubMed]
- Carmeli, E.; Patish, H.; Coleman, R. The aging hand. J. Gerontol. Sci. 2003, 58A, M146–M152. [Google Scholar] [CrossRef] [PubMed]
- GBD 2016 Stroke Collaborators. Global, regional, and national burden of stroke, 1990–2016: A systematic analysis for the global burden of disease study 2016. Lancet Neurol. 2019, 18, 439–458. [Google Scholar] [CrossRef]
- GBD 2019 Stroke Collaborators. Global, regional, and national burden of stroke and its risk factors, 1990–2019: A systematic analysis for the Global Burden of Disease Study 2019. Lancet Neurol. 2021, 20, 795–820. [Google Scholar] [CrossRef] [PubMed]
- Chen, W.; Li, G.; Li, N.; Wang, W.; Yu, P.; Wang, R.; Xue, X.; Zhao, X.; Liu, L. Restoring Voluntary Bimanual Activities of Patients with Chronic Hemiparesis Through a Foot-Controlled Hand/Forearm Exoskeleton. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 769–778. [Google Scholar] [CrossRef]
- Feigin, V.L.; Brainin, M.; Norrving, B.; Martins, S.; Sacco, R.L.; Hacke, W.; Fisher, M.; Pandian, J.; Lindsay, P. World Stroke Organization (WSO): Global Stroke Fact Sheet 2022. Int. J. Stroke 2022, 17, 18–29. [Google Scholar] [CrossRef] [PubMed]
- Nakayama, H.; Stig Jørgensen, H.; Otto Raaschou, H.; Skyhøj Olsen, T. Recovery of Upper Extremity Function in Stroke Patients: The Copenhagen Stroke Study. Arch. Phys. Med. Rehabil. 1994, 75, 394–398. [Google Scholar] [CrossRef] [PubMed]
- Cauraugh, J.H.; Lodha, N.; Naik, S.K.; Summers, J.J. Bilateral movement training and stroke motor recovery progress: A structured review and meta-analysis. Hum. Mov. Sci. 2010, 29, 853–870. [Google Scholar] [CrossRef]
- World Confederation for Physical Therapy. Available online: https://world.physio/sites/default/files/2023-01/AMC2022-Global.pdf (accessed on 30 June 2022).
- World Confederation for Physical Therapy. Available online: https://world.physio/sites/default/files/2023-02/AMC2022-AWP.pdf (accessed on 30 June 2022).
- Lee, K.B.; Lim, S.H.; Kim, K.H.; Kim, K.J.; Kim, Y.R.; Chang, W.N.; Yeom, J.W.; Kim, Y.D.; Hwang, B.Y. Six-month functional recovery of stroke patients. Int. J. Rehabil. Res. 2015, 38, 173–180. [Google Scholar] [CrossRef]
- American Hospital Association, Data Brief: Health Care Workforce Challenges Treaten Hospitals’ Ability to Care for Patients; American Hospital Association: Chicago, IL, USA, 2021.
- Castiblanco, J.C.; Mondragon, I.F.; Alvarado-Rojas, C.; Colorado, J.D. Assist-As-Needed Exoskeleton for Hand Joint Rehabilitation Based on Muscle Effort Detection. Sensors 2021, 21, 4372. [Google Scholar] [CrossRef] [PubMed]
- Costandi, M. Rehabilitation: Machine recovery. Nature 2014, 510, S8–S9. [Google Scholar] [CrossRef] [PubMed]
- Zondervan, D.K.; Friedman, N.; Chang, E.; Zhao, X.; Augsburger, R.; Reinkensmeyer, D.J.; Cramer, S.C. Home-based hand rehabilitation after chronic stroke: Randomized, controlled single-blind trial comparing the MusicGlove with a conventional exercise program. J. Rehabil. Res. Dev. 2016, 53, 457–472. [Google Scholar] [CrossRef] [PubMed]
- Sarac, M.; Solazzi, M.; Frisoli, A. Design Requirements of Generic Hand Exoskeletons and Survey of Hand Exoskeletons for Rehabilitation, Assistive, or Haptic Use. IEEE Trans. Haptics 2019, 12, 400–413. [Google Scholar] [CrossRef]
- Raghavan, P.; Santello, M.; Gordon, A.M.; Krakauer, J.W. Compensatory Motor Control after Stroke: An Alternative Joint Strategy for Object-Dependent Shaping of Hand Posture. J. Neurophysiol. 2010, 103, 3034–3043. [Google Scholar] [CrossRef] [PubMed]
- Thielbar, K.O.; Triandafilou, K.M.; Fischer, H.C.; O’Toole, J.M.; Corrigan, M.L.; Ochoa, J.M.; Stoykov, M.E.; Kamper, D.G. Benefits of using a voice and EMG-driven actuated glove to support occupational therapy for stroke survivors. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 297–305. [Google Scholar] [CrossRef]
- Hazubski, S.; Hoppe, H.; Otte, A. Non-contact visual control of personalized hand prostheses/exoskeletons by tracking using augmented reality glasses. 3D Print. Med. 2020, 6, 6. [Google Scholar] [CrossRef] [PubMed]
- Popov, D.; Gaponov, I.; Ryu, J.-H. Portable Exoskeleton Glove with Soft Structure for Hand Assistance in Activities of Daily Living. IEEE/ASME Trans. Mechatron. 2016, 22, 865–875. [Google Scholar] [CrossRef]
- Decker, M.; Kim, Y.A. Hand Exoskeleton Device for Robot Assisted Sensory-Motor Training after Stroke. In Proceedings of the 2017 IEEE World Haptics Conference (WHC), Munich, Germany, 6–9 June 2017. [Google Scholar]
- Yun, S.S.; Kang, B.B.; Cho, K.J. Exo-Glove PM: An easily customizable modularized pneumatic assistive glove. IEEE Robot. Autom. Lett. 2017, 2, 1725–1732. [Google Scholar] [CrossRef]
- Ryu, D.; Moon, K.-W.; Nam, H.; Lee, Y.; Chun, C.; Kang, S.; Song, J.-B. Micro hydraulic system using slim artificial muscles for a wearable haptic glove. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 3028–3033. [Google Scholar]
- Kobayashi, F.; Ikai, G.; Fukui, W.; Nakamoto, H.; Kojima, F. Multipoint Haptic Device for Robot Hand Teleoperation. In Proceedings of the International Symposium on Micro-NanoMechatronics and Human Science (MHS), Nagoya, Japan, 4–7 November 2012; pp. 304–309. [Google Scholar]
- Wang, J.; Fei, Y.; Pang, W. Design, Modeling, and Testing of a Soft Pneumatic Glove with Segmented PneuNets Bending Actuators. IEEE ASME Trans. Mechatron. 2019, 24, 990–1001. [Google Scholar] [CrossRef]
- Ma, Z.; Ben-Tzvi, P.; Danoff, J. Hand Rehabilitation Learning System with an Exoskeleton Robotic Glove. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 1323–1332. [Google Scholar] [CrossRef] [PubMed]
- Fiorilla, A.E.; Tsagarakis, N.G.; Nori, F.; Sandini, G. Design of a 2-Finger Hand Exoskeleton for Finger Stiffness Measurements. Appl. Bionics. Biomech. 2009, 6, 217–228. [Google Scholar]
- Sarac, M.; Solazzi, M.; Otaduy, M.A.; Frisoli, A. Rendering strategies for underactuated hand exoskeletons. IEEE Robot. Autom. Lett. 2018, 3, 2087–2092. [Google Scholar] [CrossRef]
- Tong, K.; Ho, S.; Pang, P.; Hu, X.; Tam, W.; Fung, K.; Wei, X.; Chen, P.; Chen, M. An intention driven hand functions task training robotic system. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology, Buenos Aires, Argentina, 31 August–4 September 2010; pp. 3406–3409. [Google Scholar]
- Chiri, A.; Vitiello, N.; Giovacchini, F.; Roccella, S.; Vecchi, F.; Carrozza, M.C. Mechatronic Design and Characterization of the Index Finger Module of a Hand Exoskeleton for Post-Stroke Rehabilitation. IEEE/ASME Trans. Mechatron. 2011, 17, 884–894. [Google Scholar] [CrossRef]
- Allotta, B.; Conti, R.; Governi, L.; Meli, E.; Ridolfi, A.; Volpe, Y. Development and experimental testing of a portable hand exoskeleton. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 5339–5344. [Google Scholar]
- Bouzit, M.; Burdea, G.; Popescu, G.; Boian, R. The Rutgers Master II-new design force-feedback glove. IEEE/ASME Trans. Mechatron. 2002, 7, 256–263. [Google Scholar] [CrossRef]
- Cortese, M.; Cempini, M.; de Almeida Ribeiro, P.R.; Soekadar, S.R.; Carrozza, M.C.; Vitiello, N. A Mechatronic System for Robot-Mediated Hand Telerehabilitation. IEEE/ASME Trans. Mechatron. 2015, 20, 1753–1764. [Google Scholar] [CrossRef]
- Leonardis, D.; Barsotti, M.; Loconsole, C.; Solazzi, M.; Troncossi, M.; Mazzotti, C.; Castelli, V.P.; Procopio, C.; Lamola, G.; Chisari, C.; et al. An EMG-controlled robotic hand exoskeleton for bilateral rehabilitation. IEEE Trans. Haptics 2015, 8, 140–151. [Google Scholar] [CrossRef] [PubMed]
- Rathee, D.; Chowdhury, A.; Meena, Y.K.; Dutta, A.; McDonough, S.; Prasad, G. Brain–Machine Interface-Driven Post-Stroke Upper-Limb Functional Recovery Correlates with Beta-Band Mediated Cortical Networks. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 1020–1031. [Google Scholar] [CrossRef]
- Matarić, M.J.; Eriksson, J.; Feil-Seifer, D.J.; Winstein, C.J. Socially assistive robotics for post-stroke rehabilitation. J. NeuroEng. Rehabil. 2007, 4, 5. [Google Scholar] [CrossRef]
- Procházka, A.; Schätz, M.; Vyšata, O.; Vališ, M. Microsoft kinect visual and depth sensors for breathing and heart rate analysis. Sensors 2016, 16, 996. [Google Scholar] [CrossRef]
- Araujo, R.S.; Silva, C.R.; Netto, S.P.N.; Morya, E.; Brasil, F.L. Development of a Low-Cost EEG-Controlled Hand Exoskeleton 3D Printed on Textiles. Front. Neurosci. 2021, 15, 661569. [Google Scholar] [CrossRef] [PubMed]
- Carey, L.M.; Macdonell, R.; Matyas, T.A. SENSe: Study of the Effectiveness of Neurorehabilitation on Sensation: A Randomized Controlled Trial. Neurorehabil. Neural Repair. 2011, 25, 304–313. [Google Scholar] [CrossRef] [PubMed]
- Yun, Y.; Dancausse, S.; Esmatloo, P.; Serrato, A.; Merring, C.A.; Agarwal, P.; Deshpande, A.D. Maestro: An EMG-driven assistive hand exoskeleton for spinal cord injury patients. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June May 2017; pp. 2904–2910. [Google Scholar]
- Agarwal, P.; Fox, J.; Yun, Y.; O’Malley, M.K.; Deshpande, A.D. An index finger exoskeleton with series elastic actuation for rehabilitation: Design, control and performance characterization. Int. J. Robot. Res. 2015, 34, 1747–1772. [Google Scholar] [CrossRef]
- Buryanov, A.; Kotiuk, V. Proportions of Hand Segments. Int. J. Morphol. 2010, 28, 755–758. [Google Scholar] [CrossRef]
- Borboni, A.; Mor, M.; Faglia, R. Gloreha-Hand Robotic Rehabilitation: Design, Mechanical Model, and Experiments. J. Dyn. Syst. Meas. Control 2016, 138, 111003. [Google Scholar] [CrossRef]
- Rolke, R.; Andrews Campbell, K.; Magerl, W.; Treede, R.-D. Deep Pain Thresholds in the Distal Limbs of Healthy Human Subjects. Eur. J. Pain 2005, 9, 39–48. [Google Scholar] [CrossRef] [PubMed]
- Li, M.; He, B.; Liang, Z.; Zhao, C.G.; Chen, J.; Zhuo, Y.; Xu, G.; Xie, J.; Althoefer, K. An attention-controlled hand exoskeleton for the rehabilitation of finger extension and flexion using a rigid-soft combined mechanism. Front. Neurorobot. 2019, 13, 34. [Google Scholar] [CrossRef] [PubMed]
- Jing, X.; Yong, X.; Tian, L.; Togo, S.; Jiang, Y.; Yokoi, H.; Li, G. Development of Tendon Driven Under-Actuated Mechanism Applied in an EMG Prosthetic Hand with Three Major Grasps for Daily Life. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018. [Google Scholar]
- Cipriani, C.; Controzzi, M.; Carrozza, M.C. Objectives, criteria and methods for the design of the SmartHand transradial prosthesis. Robotica 2010, 28, 919–927. [Google Scholar] [CrossRef]
- Gracia-Ibáñez, V.; Vergara, M.; Sancho-Bru, J.L.; Mora, M.C.; Piqueras, C. Functional range of motion of the hand joints in activities of the International Classification of Functioning, Disability and Health. J. Hand Ther. 2017, 30, 337–347. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Transmission Mode | Single-Joint Precision Assistance | Actuator | Wearing Method | Control Mode |
|---|---|---|---|---|---|
| Popov, D. et al. [21] | Tendon-driven glove | N | DC motor | Dorsal side | Position control |
| SAFE [27] | Linkage | N | DC motor | Dorsal side | Admittance control |
| Fiorilla, A.E et al. [28] | Linkage | Y | DC motor | Dorsal side | Position control |
| Decker, M. et al. [22] | Linkage glove | N | DC motor | Dorsal side | Force feedback control |
| Sarac, M. et al. [29] | Linkage | N | Linear actuator | Dorsal side | Position control |
| Tong, K. et al. [30] | Linkage | N | Linear actuator | Dorsal side | EMG control |
| HANDEX-OS [31] | Tendon-linkage | N | DC motor | Dorsal side | Position control |
| Allotta, B. et al. [32] | Linkage | N | Servo motor | Dorsal side | Position control |
| Exo-Glove PM [23] | Glove | N | Pneumatic actuator | Dorsal side | ---- |
| Ryu, D. et al. [24] | Glove | N | Hydraulic actuator | Dorsal side | Force feedback control |
| Kobayashi, F. et al. [25] | Linkage glove | N | Shape memory alloy | Dorsal side | Force feedback control |
| Rutgers Master II [33] | Linkage | N | Pneumatic actuator | Palmar side | Force–position hybrid control |
| Cortese, M. et al. [34] | Tendon-driven linkage | N | DC motor | Lateral side | Speed control |
| Wang, J. et al. [26] | Glove | N | Pneumatic actuator | Dorsal side | Force feedback control |
| Araujo, R.S. et al. [39] | Linkage glove | N | DC motor | Dorsal side | EEG control |
| BRAVO Hand [35] | Linkage | N | DC motor | Dorsal side | EMG control |
| Linkage Length | ||||
| l1 | l2 | l3 | l4 | l5 |
| 35 mm | 60 mm | 18.7647 mm | 25 mm | 35 mm |
| Joint Rotation Range | ||||
| θ1 | θ4 | |||
| 0°–225° | 120°–20° | |||
| 27.6 mm | 28 mm | 22 mm |
| Name | Weight (g) | Output Forces (N) |
|---|---|---|
| Exo-Glove [23] | Whole hand, 250 g | Index, 3.59 N; Thumb, 1.43 N |
| HANDEXOS [31] | 114.9 g | 40 N |
| Maestro [41,42] | 57 g | 12.5 N |
| K. Y, Tong. et al. [30] | Whole hand, 500 g | Whole hand, 23 N |
| M. Decker. et al. [22] | Whole hand, 454 g | Whole hand, 10 N |
| SAFE [27] | Whole hand, 430 g | Maximum force, 10 N |
| The proposed exoskeleton hand | 40 g | 3.3 N |
| MCP Joint | PIP Joint | |||
|---|---|---|---|---|
| LMC | 3D-Printed Finger | LMC | 3D-Printed Finger | |
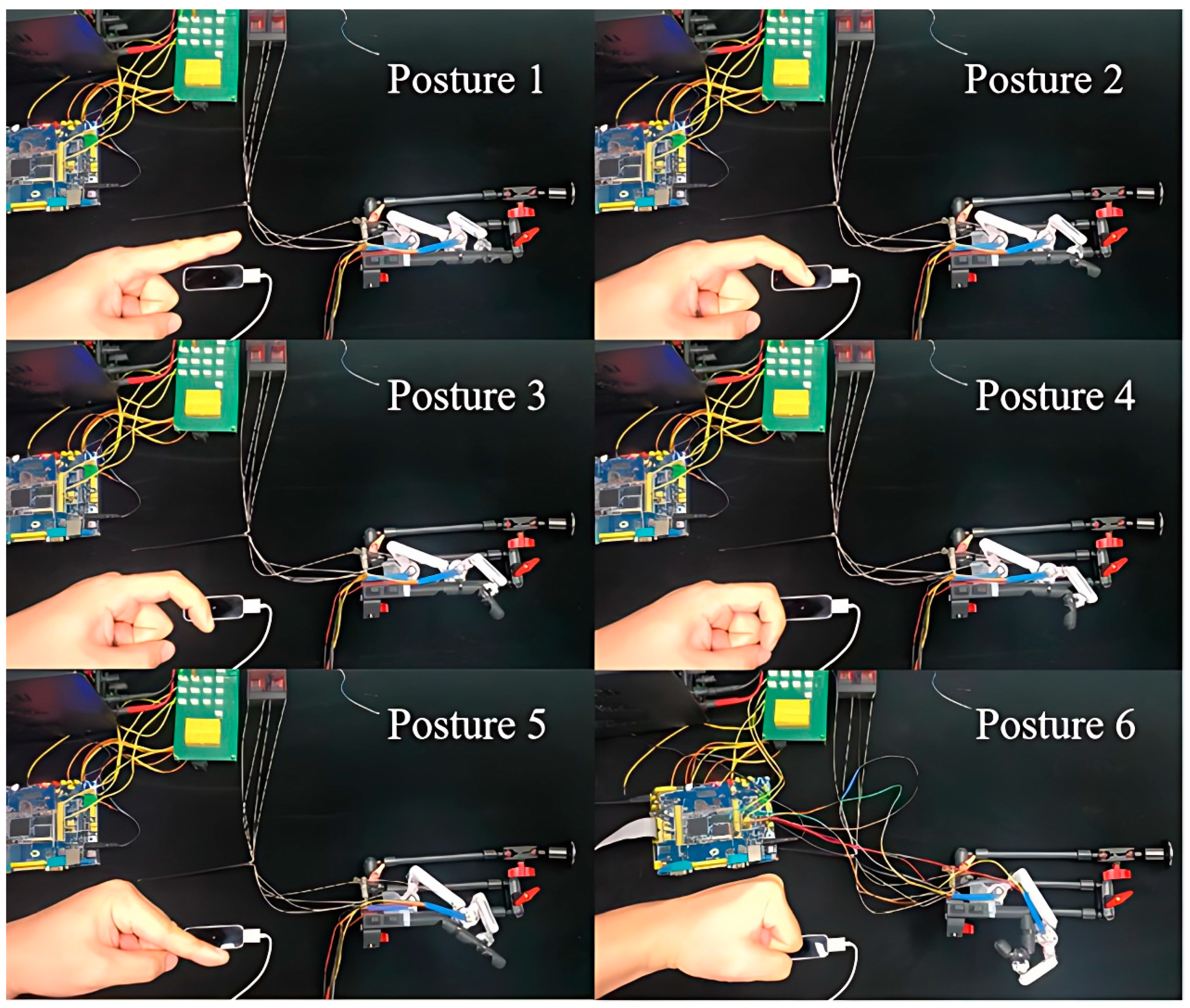
| Posture 1 | 5° | 5.99° | 0° | 3.38° |
| Posture 2 | 0° | 5.96° | 25° | 23.28° |
| Posture 3 | 5° | 6.02° | 55° | 60.47° |
| Posture 4 | 0° | 5.96° | 75° | 81.45° |
| Posture 5 | 30° | 32.35° | 0° | 3.37° |
| Posture 6 | 90° | 91.25° | 75° | 81.42° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Z.; Jing, X.; Zhang, X.; Shan, B.; Jiang, Y.; Li, G.; Yokoi, H.; Yong, X. Finger-Individuating Exoskeleton System with Non-Contact Leader–Follower Control Strategy. Bioengineering 2024, 11, 754. https://doi.org/10.3390/bioengineering11080754
Sun Z, Jing X, Zhang X, Shan B, Jiang Y, Li G, Yokoi H, Yong X. Finger-Individuating Exoskeleton System with Non-Contact Leader–Follower Control Strategy. Bioengineering. 2024; 11(8):754. https://doi.org/10.3390/bioengineering11080754
Chicago/Turabian StyleSun, Zhenyu, Xiaobei Jing, Xinyu Zhang, Biaofeng Shan, Yinlai Jiang, Guanglin Li, Hiroshi Yokoi, and Xu Yong. 2024. "Finger-Individuating Exoskeleton System with Non-Contact Leader–Follower Control Strategy" Bioengineering 11, no. 8: 754. https://doi.org/10.3390/bioengineering11080754
APA StyleSun, Z., Jing, X., Zhang, X., Shan, B., Jiang, Y., Li, G., Yokoi, H., & Yong, X. (2024). Finger-Individuating Exoskeleton System with Non-Contact Leader–Follower Control Strategy. Bioengineering, 11(8), 754. https://doi.org/10.3390/bioengineering11080754