
Development and Application of a Stability Index Estimation Algorithm Based on Machine Learning for Elderly Balance Ability Diagnosis in Daily Life

 ,
,  ,
,  ,
,
Abstract
1. Introduction
2. Materials and Methods
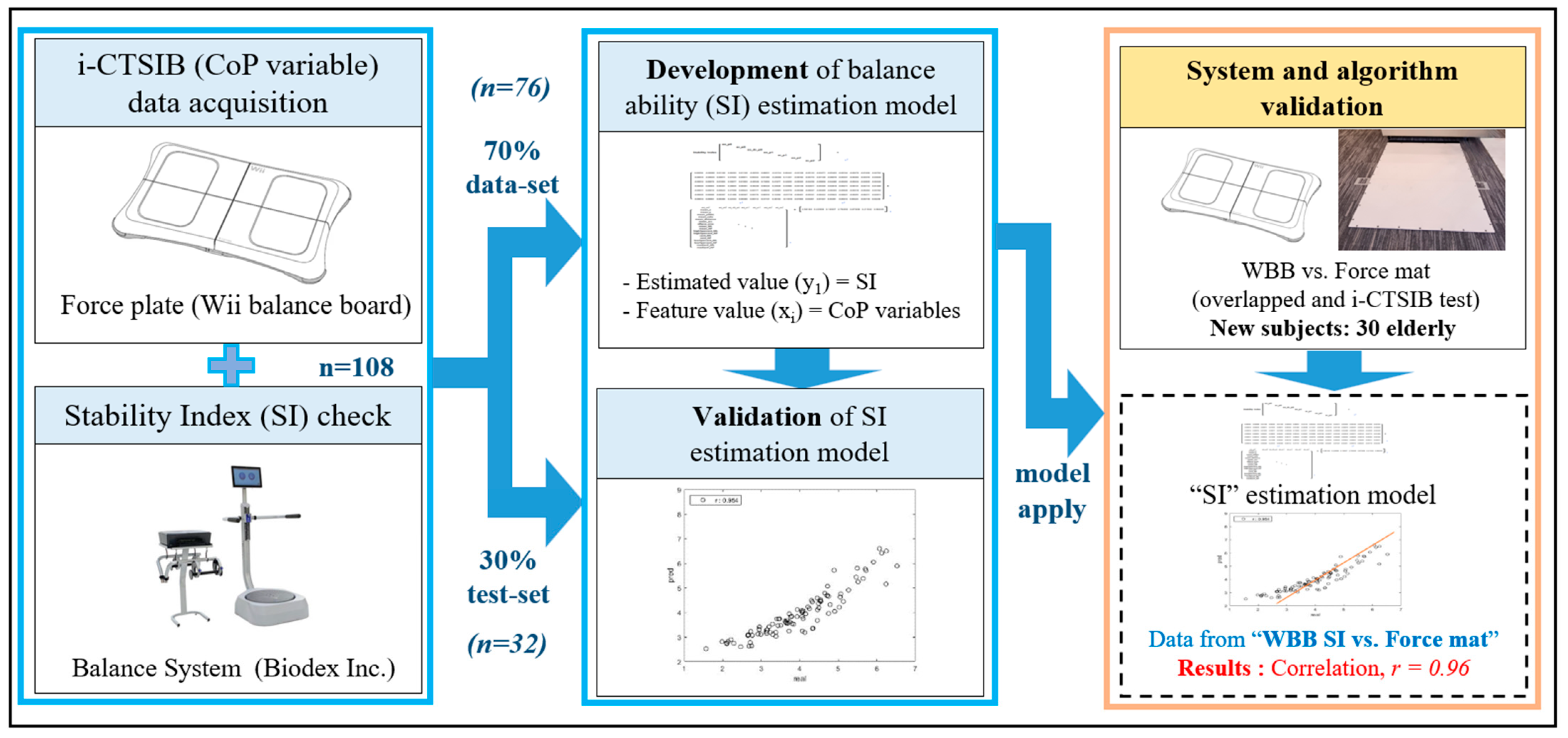
2.1. Study Procedure
2.2. Development and Validation of the Balance Ability Model
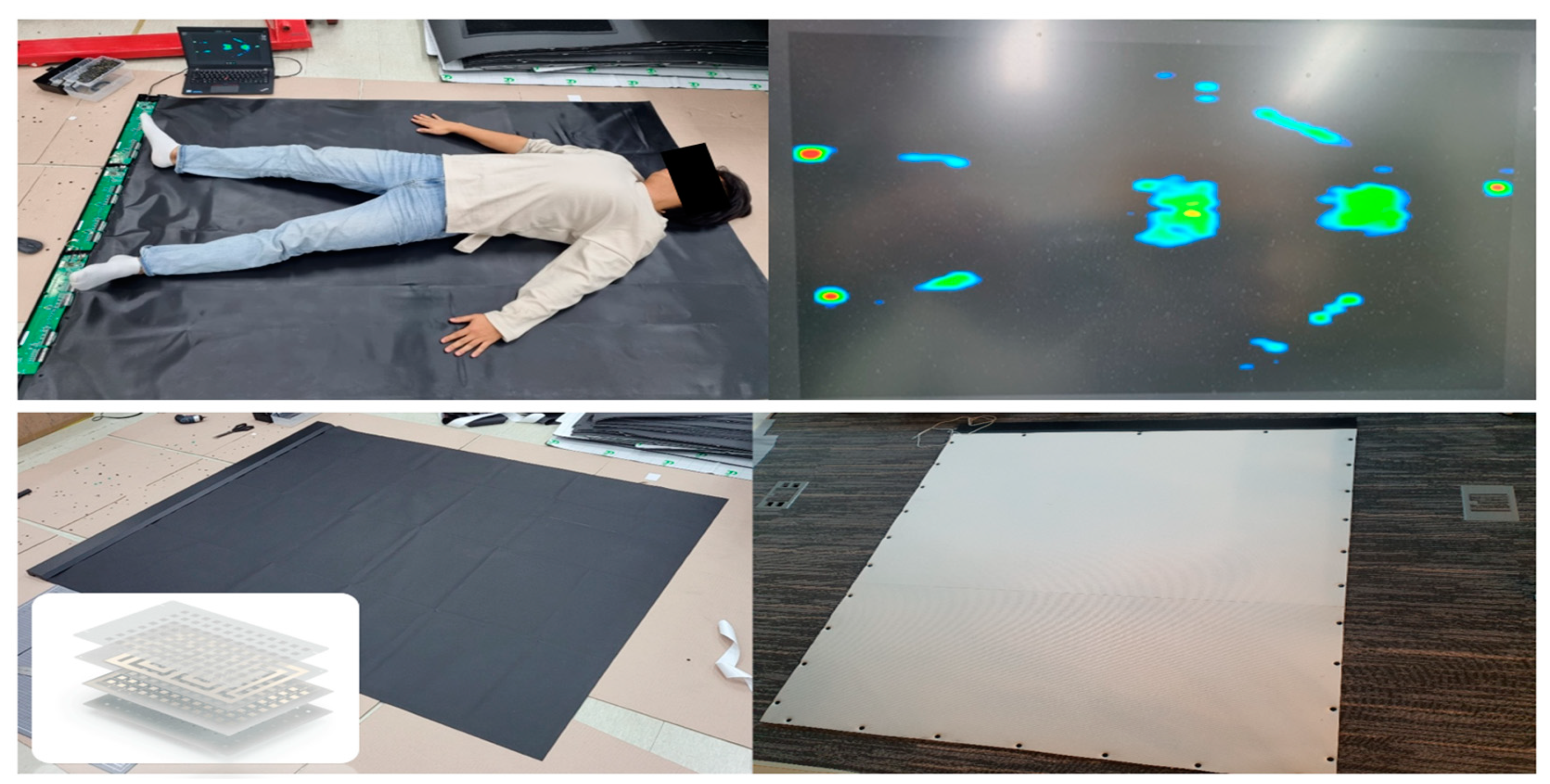
2.3. Customized CoP Measurement System
2.4. System and Algorithm Validation
3. Results
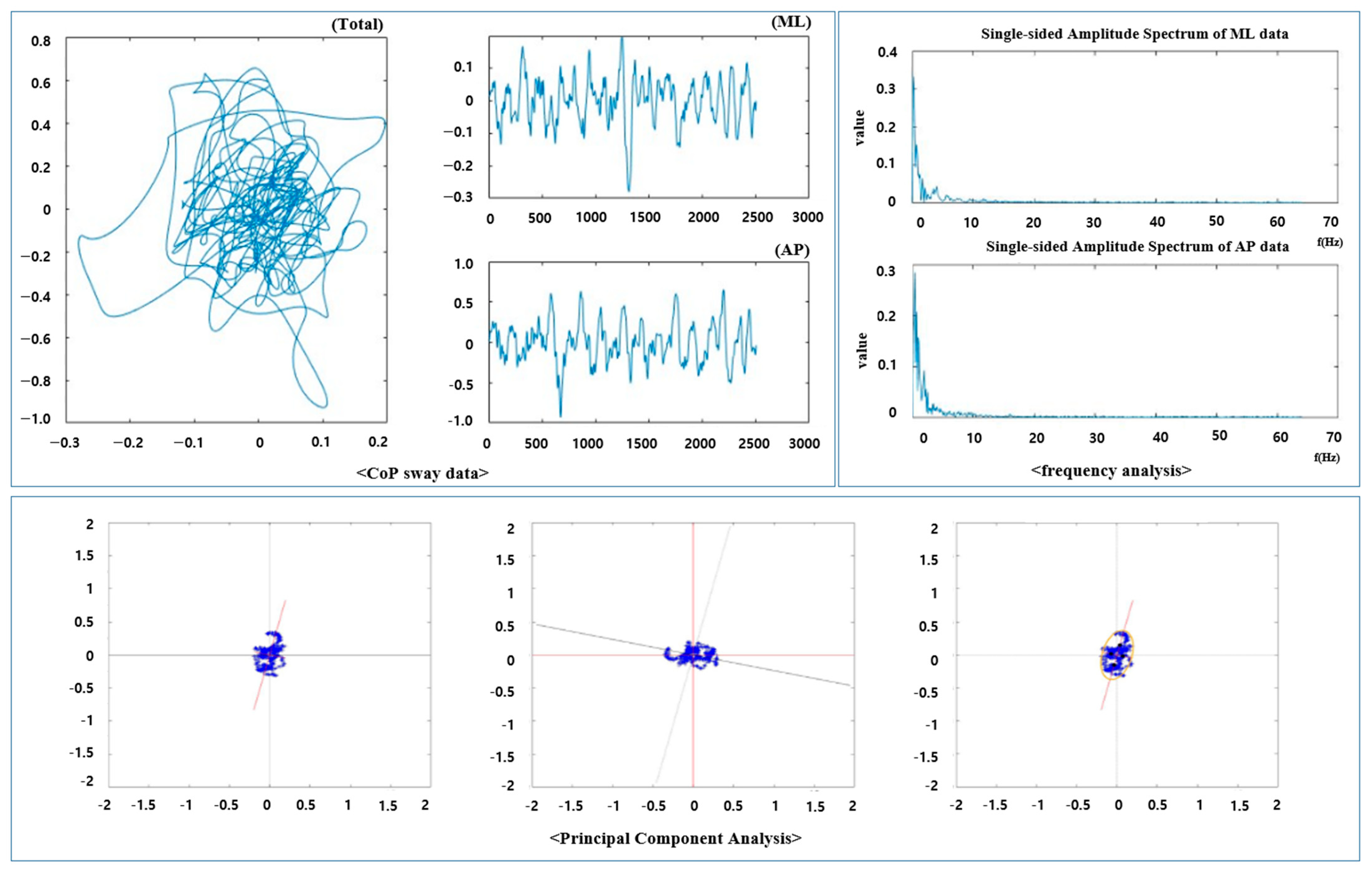
3.1. Results of CoP Variables during CTSIB
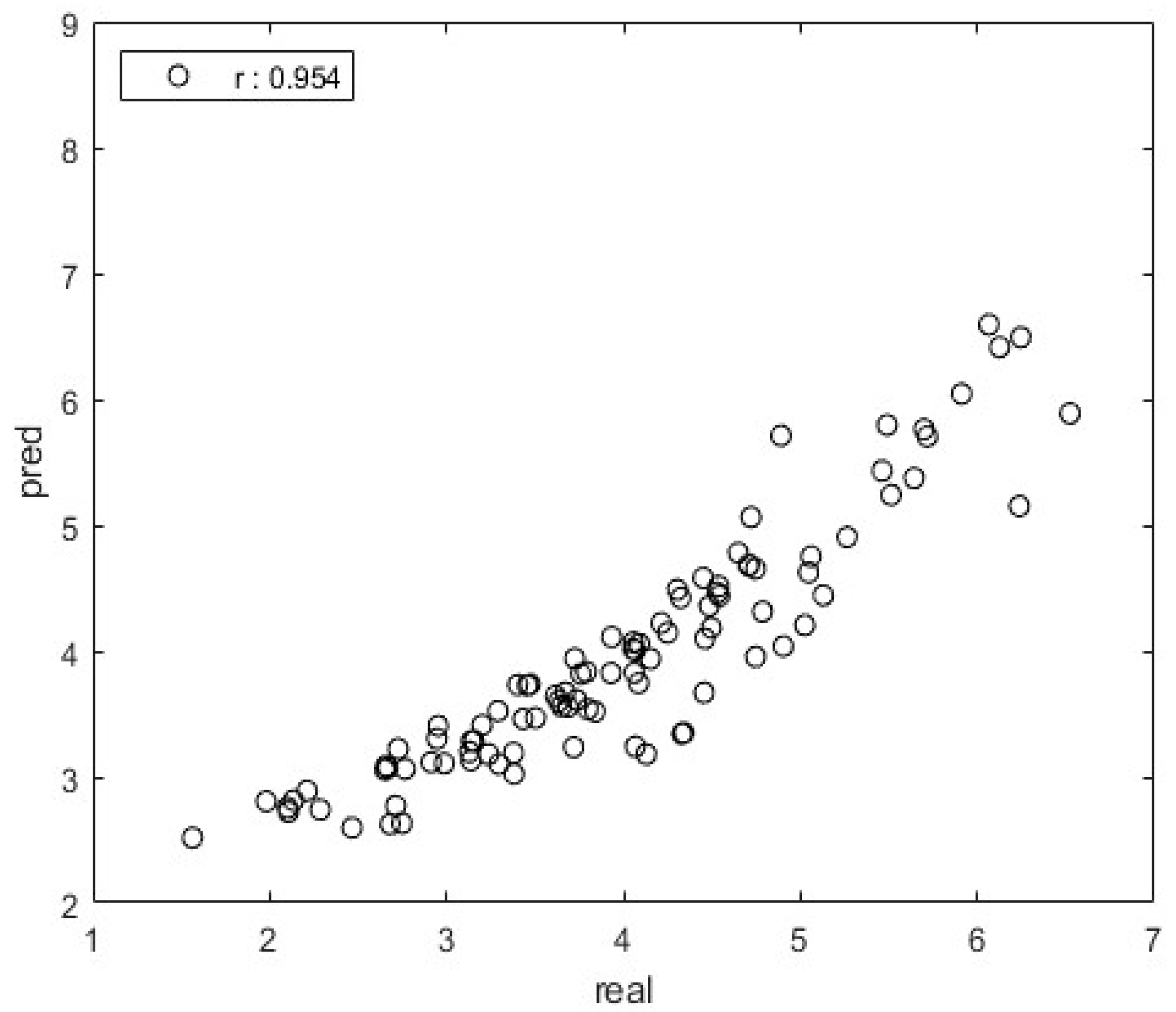
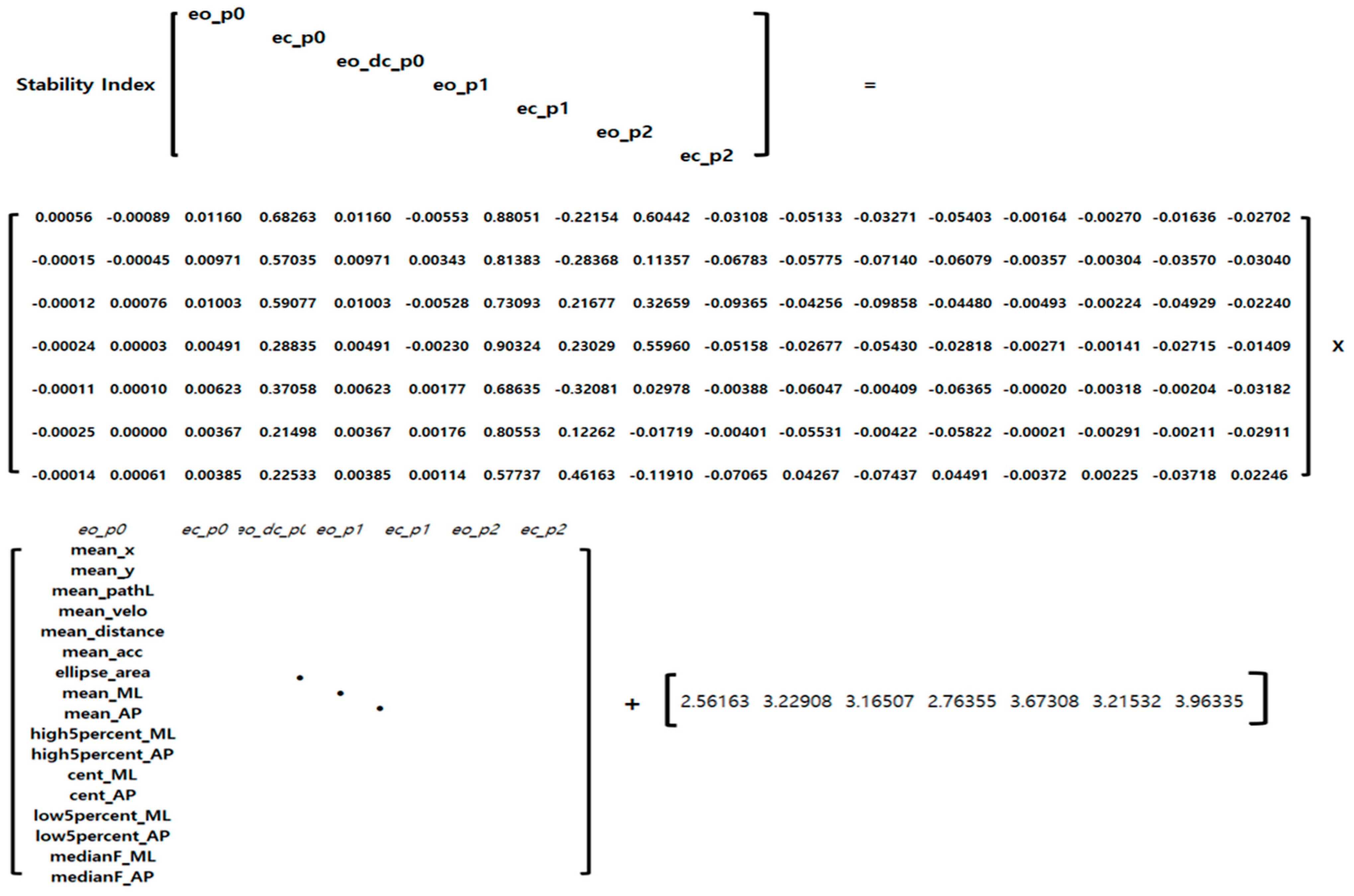
3.2. Results of Stability Index Regression Model
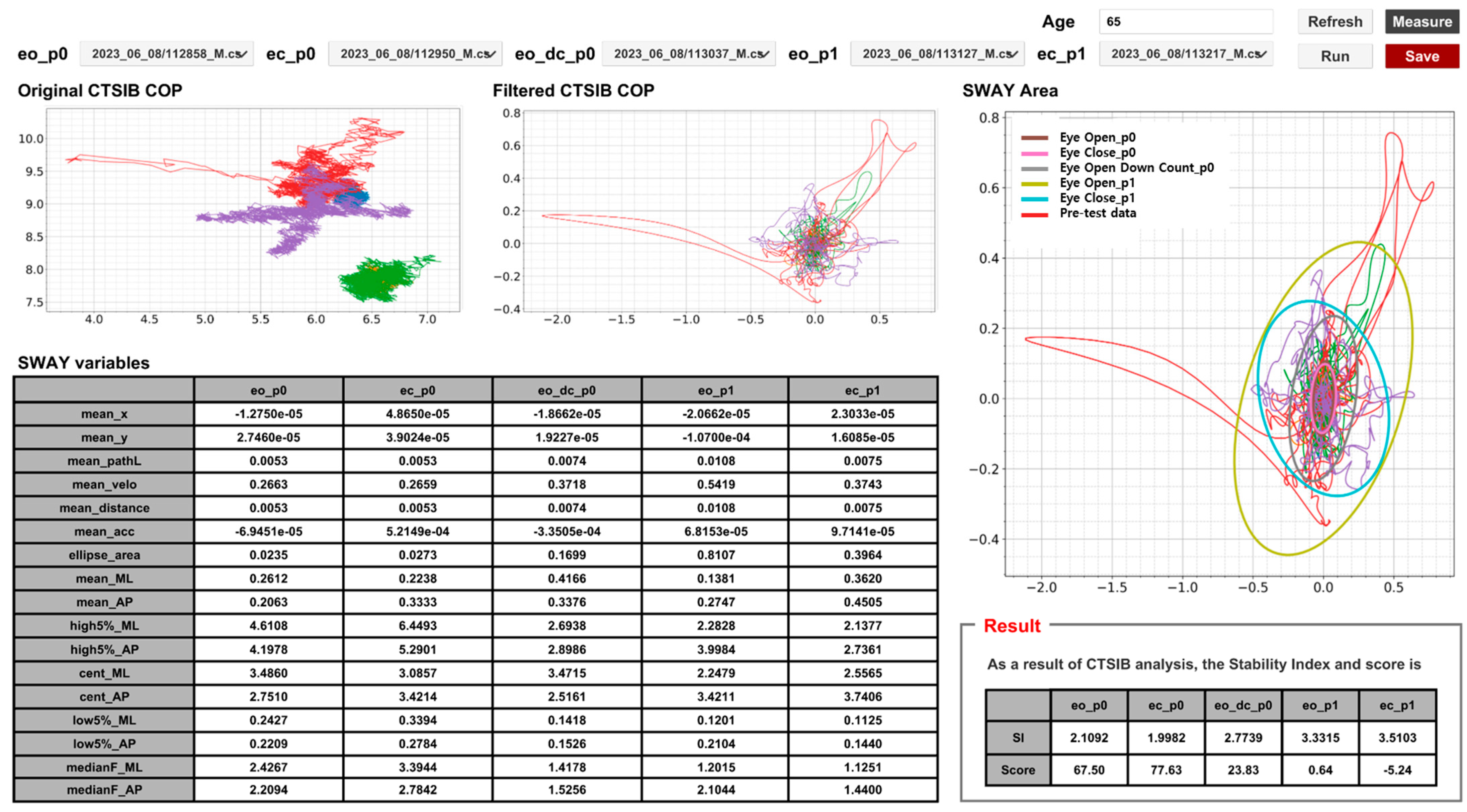
3.3. Results of System and Algorithm Validation
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Leirós-Rodríguez, R.; Romo-Pérez, V.; García-Soidán, J.L.; Soto-Rodríguez, A. Identification of Body Balance Deterioration of Gait in Women Using Accelerometers. Sustainability 2020, 12, 1222. [Google Scholar] [CrossRef]
- Rispens, S.M.; van Schooten, K.S.; Pijnappels, M.; Daffertshofer, A.; Beek, P.J.; van Dieen, J.H. Identification of fall risk predictors in daily life measurements: Gait characteristics’ reliability and association with self-reported fall history. Neurorehabil. Neural Repair 2015, 29, 54–61. [Google Scholar] [CrossRef] [PubMed]
- Matsumoto, H.; Makabe, T.; Morita, T.; Ikuhara, K.; Kajigase, A.; Okamoto, Y.; Ashikawa, E.; Kobayashi, E.; Hagino, H. Accelerometry-based gait analysis predicts falls among patients with a recent fracture who are ambulatory: A 1-year prospective study. Int. J. Rehabil. Res. 2015, 38, 131–136. [Google Scholar] [CrossRef]
- Senden, R.; Savelberg, H.; Grimm, B.; Heyligers, I.; Meijer, K. Accelerometry-based gait analysis, an additional objective approach to screen subjects at risk for falling. Gait Posture 2012, 36, 296–300. [Google Scholar] [CrossRef] [PubMed]
- Leirós-Rodríguez, R.; García-Soidán, J.L.; Romo-Pérez, V. Analyzing the use of accelerometers as a method of early diagnosis of alterations in balance in elderly people: A systematic review. Sensors 2019, 19, 3883. [Google Scholar] [CrossRef] [PubMed]
- Matsumura, B.A.; Ambrose, A.F. Balance in the elderly. Clin. Geriatr. Med. 2006, 22, 395–412. [Google Scholar] [CrossRef]
- Michikawa, T.; Nishiwaki, Y.; Takebayashi, T.; Toyama, Y. One-leg standing test for elderly populations. J. Orthop. Sci. 2009, 14, 675–685. [Google Scholar] [CrossRef]
- Bergquist, R.; Nerz, C.; Taraldsen, K.; Mellone, S.; Ihlen, E.A.F.; Vereijken, B.; Helbostad, J.L.; Becker, C.; Mikolaizak, A.S. Predicting Advanced Balance Ability and Mobility with an Instrumented Timed Up and Go Test. Sensors 2020, 20, 4987. [Google Scholar] [CrossRef]
- Cohen, H.S. A review on screening tests for vestibular disorders. J. Neurophysiol. 2019, 1, 81–92. [Google Scholar] [CrossRef]
- Available online: https://www.boditrak.com/ (accessed on 15 May 2023).
- Available online: https://balancetrackingsystems.com/ (accessed on 15 May 2023).
- Karatas, M.; Eriskin, L.; Deveci, M.; Pamucar, D.; Garg, H. Big Data for Healthcare Industry 4.0: Applications, challenges and future perspectives. Expert Syst. Appl. 2022, 200, 116912. [Google Scholar] [CrossRef]
- Jaberi, A.; Zahedian-Nasab, N.; Shirazi, F.; Kavousipor, S. Benefits of chair-based home exercises for physical fitness, activities of daily living, and balance status in older adults with balance disorder. Educ. Gerontol. 2022, 48, 41–53. [Google Scholar] [CrossRef]
- Severini, G.; Straudi, S.; Pavarelli, C.; Da Roit, M.; Martinuzzi, C.; Pizzongolo, L.D.; Basaglia, N. Use of Nintendo Wii Balance Board for posturographic analysis of Multiple Sclerosis patients with minimal balance impairment. J. Neuroeng. Rehabil. 2017, 11, 19. [Google Scholar] [CrossRef]
- Seo, J.-W.; Kim, J.I.; Kim, T.; Jang, K.-M.; Jeong, Y.; Do, J.-H. Sensory Interaction and Balancing Ability Evaluation of the Elderly Using a Simplified Force Plate System. Sensors 2022, 22, 8883. [Google Scholar] [CrossRef] [PubMed]
- Arnold, B.L.; Schmitz, R.J. Examination of balance measures produced by the Biodex Stability system. J. Athl. Train. 1998, 33, 323–327. [Google Scholar]
- Hussain, I.; Park, S.-J. Prediction of Myoelectric Biomarkers in Post-Stroke Gait. Sensors 2021, 21, 5334. [Google Scholar] [CrossRef]
- Debbi, E.M.; Wolf, A.; Goryachev, Y.; Yizhar, Z.; Luger, E.; Debi, R.; Haim, A. In-shoe center of pressure: Indirect force plate vs. direct insole measurement. Foot 2012, 22, 269–275. [Google Scholar] [CrossRef]
- O’Connor, S.M.; Baweja, H.S.; Goble, D.J. Validating the BTrackS Balance Plate as a low cost alternative for the measurement of sway-induced center of pressure. J. Biomech. 2016, 8, 4142–4145. [Google Scholar] [CrossRef]
- Saenz-Cogollo, J.F.; Pau, M.; Fraboni, B.; Bonfiglio, A. Pressure Mapping Mat for Tele-Home Care Applications. Sensors 2016, 16, 365. [Google Scholar] [CrossRef]
- Lou, C.; Wang, S.; Liang, T.; Pang, C.; Huang, L.; Run, M.; Liu, X. A Graphene-Based Flexible Pressure Sensor with Applications to Plantar Pressure Measurement and Gait Analysis. Materials 2017, 10, 1068. [Google Scholar] [CrossRef]
- Rentz, C.; Far, M.S.; Boltes, M.; Schnitzler, A.; Amunts, K.; Dukart, J.; Minnerop, M. System Comparison for Gait and Balance Monitoring Used for the Evaluation of a Home-Based Training. Sensors 2022, 22, 4975. [Google Scholar] [CrossRef]
- Weizman, Y.; Tan, A.M.; Fuss, F.K. Accuracy of Centre of Pressure Gait Measurements from Two Pressure-Sensitive Insoles. Proceedings 2018, 2, 277. [Google Scholar] [CrossRef]
- Cyma-Wejchenig, M.; Tarnas, J.; Marciniak, K.; Stemplewski, R. The Influence of Proprioceptive Training with the Use of Virtual Reality on Postural Stability of Workers Working at Height. Sensors 2020, 20, 3731. [Google Scholar] [CrossRef] [PubMed]
- Abdel Ghafar, M.A.; Abdelraouf, O.R.; Abdelgalil, A.A.; Seyam, M.K.; Radwan, R.E.; El-Bagalaty, A.E. Quantitative Assessment of Sensory Integration and Balance in Children with Autism Spectrum Disorders: Cross-Sectional Study. Children 2022, 9, 353. [Google Scholar] [CrossRef] [PubMed]
- Tweel, E.; Stromberg, A.J.; Gera, G. Use of Wearable Sensors to Assess the Effects of Performing a Cognitive Task on Sensory Integration of Balance in Healthy Individuals. Sensors 2022, 22, 2776. [Google Scholar] [CrossRef] [PubMed]
- Ojie, O.D.; Saatchi, R. Kohonen Neural Network Investigation of the Effects of the Visual, Proprioceptive and Vestibular Systems to Balance in Young Healthy Adult Subjects. Healthcare 2021, 9, 1219. [Google Scholar] [CrossRef]
- Dewar, R.M.; Tucker, K.; Claus, A.P.; van den Hoorn, W.; Ware, R.S.; Johnston, L.M. Evaluating validity of the Kids-Balance Evaluation Systems Test (Kids-BESTest) Clinical Test of Sensory Integration of Balance (CTSIB) criteria to categorise stance postural control of ambulant children with CP. Disabil. Rehabil. 2021, 44, 4039–4046. [Google Scholar] [CrossRef]
- Chaikeeree, N.; Saengsirisuwan, V.; Chinsongkram, B.; Boonsinsukh, R. Interaction of age and foam types used in Clinical Test for Sensory Interaction and Balance (CTSIB). Gait Posture 2015, 41, 313–315. [Google Scholar] [CrossRef]
- Oh, K.Y.; Kim, S.A.; Lee, S.Y.; Lee, Y.S. Comparison of manual balance and balance board tests in healthy adults. Ann. Rehabil. Med. 2011, 35, 873–879. [Google Scholar] [CrossRef]
- Cachupe, W.J.C.; Shifflett, B.; Kahanov, L.; Wughalter, E.H. Reliability of biodex balance system measures. Meas. Phys. Educ. Exerc. Sci. 2001, 5, 97–108. [Google Scholar] [CrossRef]
- Donoghue, D.; Physiotherapy Research and Older People (PROP) group; Stokes, E.K. How much change is true change? The minimum detectable change of the Berg Balance Scale in elderly people. J. Rehabil. Med. 2009, 41, 343–346. [Google Scholar] [CrossRef]
- Microsoft Technology Licensing, LLC. Virtual Reality Floor Mat Activity Region. U.S. Patent 2019/0302879 A1, 3 October 2019. [Google Scholar]
- Schuermans, J.; Van Hootegem, A.; Van den Bossche, M.; Van Gendt, M.; Witvrouw, E.; Wezenbeek, E. Extended reality in musculoskeletal rehabilitation and injury prevention—A systematic review. Phys. Ther. Sport 2022, 55, 229–240. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Description |
|---|---|
| mean [cm] | mean of CoP movement |
| mean path [cm/s] | mean of CoP distance per second |
| mean velocity [cm/s] | mean of CoP velocity per second |
| mean distance [cm] | mean of one sample distance per second |
| mean acc. [cm/s2] | mean of CoP acceleration per second |
| ellipse area [cm2] | 95% area based on ellipse major axis |
| frequency high 5% [Hz] | top 5% power frequency of CoP |
| frequency center [Hz] | center frequency of CoP |
| frequency low 5% [Hz] | bottom 5% power frequency of CoP |
| frequency median [Hz] | median frequency of CoP |
| Variable | Eye-Open | Eye-Close | |||||
|---|---|---|---|---|---|---|---|
| Firm | Firm-DC | Foam-1 | Foam-2 | Firm | Foam-1 | Foam-2 | |
| mean [cm] | 0.39 ± 0.09 | 0.38 ± 0.09 | 0.38 ± 0.08 | 0.39 ± 0.09 | 0.38 ± 0.09 | 0.38 ± 0.07 | 0.38 ± 0.08 |
| mean path [cm/s] | 0.02 ± 0.01 | 0.03 ± 0.02 | 0.03 ± 0.01 | 0.04 ± 0.01 | 0.03 ± 0.02 | 0.04 ± 0.02 | 0.05 ± 0.02 |
| mean velocity [cm/s] | 1.20 ± 0.54 | 1.69 ± 0.97 | 1.59 ± 0.56 | 2.04 ± 0.65 | 1.64 ± 0.94 | 2.26 ± 1.05 | 2.94 ± 1.02 |
| mean distance [cm] | 0.02 ± 0.01 | 0.03 ± 0.02 | 0.02 ± 0.01 | 0.04 ± 0.01 | 0.03 ± 0.02 | 0.04 ± 0.02 | 0.05 ± 0.02 |
| mean acc. ×103 [cm/s2] | −0.16 ± 0.78 | −0.12 ± 1.19 | −0.20 ± 0.67 | −0.08 ± 1.51 | −0.08 ± 0.76 | −0.10 ± 1.15 | −0.03 ± 1.23 |
| ellipse area [cm2] | 1.49 ± 1.67 | 3.27 ± 5.73 | 2.13 ± 1.50 | 3.58 ± 2.24 | 1.71 ± 1.79 | 3.16 ± 3.00 | 6.28 ± 4.07 |
| frequency high 5% [Hz] | 2.73 ± 0.76 | 2.73 ± 0.72 | 2.73 ± 0.63 | 2.77 ± 0.69 | 2.82 ± 0.66 | 2.84 ± 0.64 | 2.78 ± 0.62 |
| frequency center [Hz] | 2.87 ± 0.80 | 2.87 ± 0.76 | 2.87 ± 0.67 | 2.92 ± 0.73 | 2.97 ± 0.70 | 2.99 ± 0.67 | 2.93 ± 0.66 |
| frequency low 5% [Hz] | 0.14 ± 0.04 | 0.14 ± 0.04 | 0.14 ± 0.03 | 0.15 ± 0.04 | 0.14 ± 0.03 | 0.15 ± 0.03 | 0.15 ± 0.03 |
| frequency median [Hz] | 1.44 ± 0.40 | 1.44 ± 0.38 | 1.44 ± 0.33 | 1.46 ± 0.37 | 1.48 ± 0.35 | 1.49 ± 0.34 | 1.46 ± 0.33 |
| Regression Model | Eye-Open | Eye-Close | |||||
|---|---|---|---|---|---|---|---|
| Firm | Firm-DC | Foam-1 | Foam-2 | Firm | Foam-1 | Foam-2 | |
| Linear | 0.954 | 0.943 | 0.956 | 0.983 | 0.945 | 0.961 | 0.970 |
| SVM | 0.898 | 0.905 | 0.905 | 0.968 | 0.891 | 0.913 | 0.938 |
| GAM | 0.865 | 0.786 | 0.789 | 0.793 | 0.805 | 0.821 | 0.862 |
| Tree | 0.954 | 0.943 | 0.956 | 0.983 | 0.945 | 0.961 | 0.970 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seo, J.-W.; Kim, T.; Kim, J.I.; Jeong, Y.; Jang, K.-M.; Kim, J.; Do, J.-H. Development and Application of a Stability Index Estimation Algorithm Based on Machine Learning for Elderly Balance Ability Diagnosis in Daily Life. Bioengineering 2023, 10, 943. https://doi.org/10.3390/bioengineering10080943
Seo J-W, Kim T, Kim JI, Jeong Y, Jang K-M, Kim J, Do J-H. Development and Application of a Stability Index Estimation Algorithm Based on Machine Learning for Elderly Balance Ability Diagnosis in Daily Life. Bioengineering. 2023; 10(8):943. https://doi.org/10.3390/bioengineering10080943
Chicago/Turabian StyleSeo, Jeong-Woo, Taehong Kim, Joong Il Kim, Youngjae Jeong, Kyoung-Mi Jang, Junggil Kim, and Jun-Hyeong Do. 2023. "Development and Application of a Stability Index Estimation Algorithm Based on Machine Learning for Elderly Balance Ability Diagnosis in Daily Life" Bioengineering 10, no. 8: 943. https://doi.org/10.3390/bioengineering10080943
APA StyleSeo, J.-W., Kim, T., Kim, J. I., Jeong, Y., Jang, K.-M., Kim, J., & Do, J.-H. (2023). Development and Application of a Stability Index Estimation Algorithm Based on Machine Learning for Elderly Balance Ability Diagnosis in Daily Life. Bioengineering, 10(8), 943. https://doi.org/10.3390/bioengineering10080943