1. Introduction
With the escalating global phenomenon of population aging, the number of individuals with disabilities in the elderly cohort is undergoing a rapid surge. In 2021, China alone had 44 million disabled elderly individuals [
1]. Moreover, projections indicate a continuous increase in the population of disabled elderly individuals in China over the next decade, with an estimated figure of 77 million by 2030 [
2]. The scarcity of caregiving personnel has emerged as a pertinent societal challenge [
3].
In the realm of caregiving, enabling the seamless mobility of disabled elderly individuals among essential assistive devices not only presents the most physically demanding aspect for caregivers but also represents the core predicament constraining in-home elderly care [
4,
5]. The advent of dual-arm care robots has emerged as a viable panacea to address this predicament, as they effectively facilitate the transfer and transportation of disabled elderly individuals to designated locations, thereby alleviating the workload burden on caregivers. However, this innovation poses heightened requisites for ensuring optimal comfort levels throughout the process of transferring and transporting the human body [
6]. Consequently, the objective assessment of human comfort has become an exigent issue that necessitates immediate attention.
Presently, several scholars have conducted research on the issue of human comfort in various postures. For investigating comfort in static body postures, Li conducted a study on the comfort experienced by individuals on different seat cushions, employing objective metrics such as stress distribution and average sitting pressure, along with subjective comfort rating scales [
7]. Liu analyzed indicators such as seat contact area and maximum sitting pressure to examine the relationship between human comfort and seat cushion shape, incorporating subjective evaluation methods [
8]. Xiong evaluated lumbar muscle fatigue by assessing sEMG signals from the erector spinae muscles. They investigated the influence of seated posture on human comfort during aviation, employing subjective evaluation methods [
9]. Anjani employed a Statistical Package for the Social Sciences (SPSS) analysis of subjective questionnaires to study the impact of seat spacing on human comfort and applied significance analysis to rank the magnitude of factors influencing human comfort [
10]. Naddeo assessed the influence of different spinal postures on human comfort using subjective questionnaire surveys and a method to weigh the effect of the perceived spinal discomfort on overall postural comfort was proposed [
11]. Liu analyzed upper limb muscle fatigue by measuring sEMG signals from upper limb muscles and performed an analysis of human comfort through subjective questionnaires [
12]. In terms of studying the overall process of transferring and transporting the human body, Ding established a comfort evaluation function by formulating a human force balance equation and measuring sEMG signals during the transfer process. They determined the parameter values of the comfort evaluation function through questionnaire surveys [
13]. Liu examined human comfort by developing a human–robot biomechanical model and conducting ADAMS simulations. They validated the comfort experienced during the transfer and transportation process through experimental investigations and subjective questionnaire surveys [
14].
These studies have provided valuable insights into evaluating human comfort in various scenarios. However, existing research on the comfort of human posture only focuses on analyzing comfort at fixed positions on the body, overlooking the study of comfort during dynamic changes in body posture. Moreover, when objectively assessing human comfort, the employed evaluation metrics are limited to single indicators such as pressure distribution or surface electromyography signals, lacking comprehensive validation of comfort assessment. Within the domain of holistic comfort assessment methods, two significant issues prevail. Firstly, in the computation of comfort evaluation functions, determining the magnitudes of forces and moments exerted on the human body poses an intractable problem, necessitating assumptions and additional conditions to supplement the equations in the system. However, this approach introduces errors in the calculation results while simultaneously estimating force and moment magnitudes. Secondly, the validation of comfort evaluation functions is primarily reliant on subjective questionnaires, thereby lacking objective verification. Although subjective assessment methods constitute an essential aspect of comfort evaluation, their inherent subjectivity introduces randomness, resulting in uncertain validation outcomes.
This paper addresses the issue of indeterminacy in human–machine biomechanical models and proposes a real-time method for resolving the challenge of determining the forces acting on the human body in the sagittal plane. Experimental validation is conducted to verify the proposed approach. The method employs Tekscan pressure sensors and an Optitrack motion capture system to acquire real-time pressure and angular data of the human body. These data are then utilized as inputs into a static human–machine system model, enabling the determination of frictional forces and joint torques experienced by the body. Simultaneously, a real-time method for evaluating human comfort is established and validated using sEMG signals. A comfort evaluation function is developed through questionnaire surveys and the proposed method for determining human forces is utilized to calculate real-time values of this function, thereby providing a quantitative basis for comfort assessment. Additionally, Noraxon surface electromyography sensors are employed to capture real-time surface electromyography information, which is combined with subjective questionnaire responses to validate the comfort evaluation method. Experimental results demonstrate an 85.1% accuracy rate for the proposed comfort evaluation method.
3. Results and Discussion
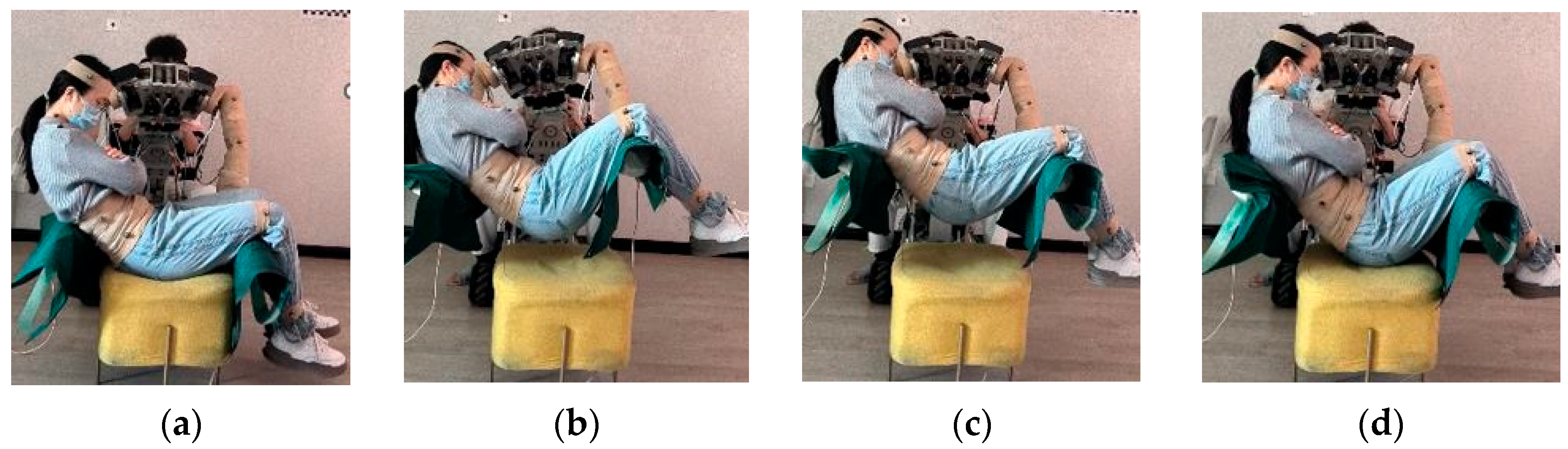
The purpose of the analysis was to validate the real-time solution methodology for the human–robot static model and the comfort assessment function, which necessitated a detailed examination of the data gathered during the experiment. A total of 35 sets of data comprising position, pressure, and surface electromyography information were collected. Initial data processing was focused on the acquired positional information.
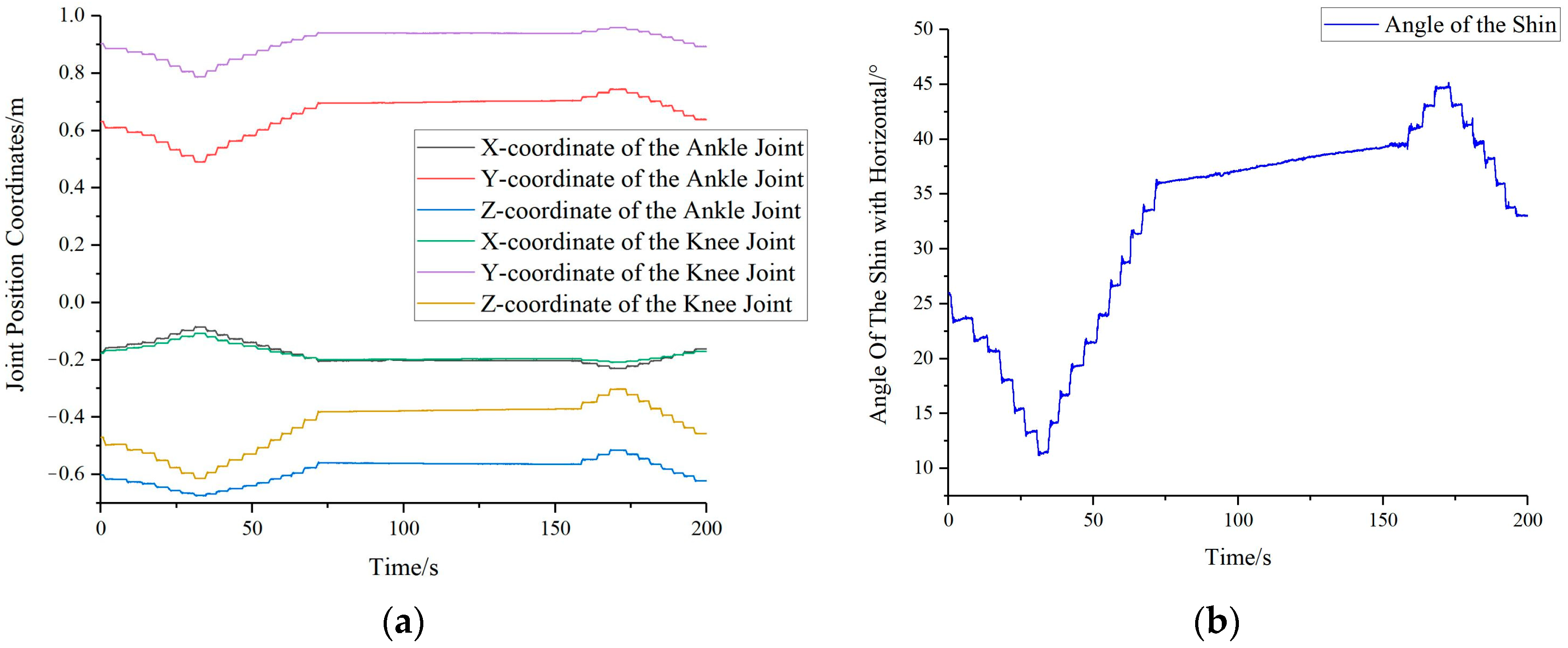
By attaching marker points to seven key positions on the human body and capturing the data using the Optitrack motion capture system, real-time coordinate information (
X1,
Y1,
Z1, …,
X7,
Y7,
Z7) for these seven key positions can be obtained. Taking the angle between the shin and the horizontal plane as an example, through motion capture, we can obtain the position information (
X1,
Y1,
Z1,
X2,
Y2,
Z2) of the ankle joint
A1 and the knee joint
A2, as shown in
Figure 8a. By substituting the above information into Equation (7), we can calculate the real-time angle information (
β1) between the shin and the horizontal plane, as illustrated in
Figure 8b.
In a similar fashion, the angles between the human shin, thigh, trunk, and head with the horizontal plane are illustrated in
Figure 9.
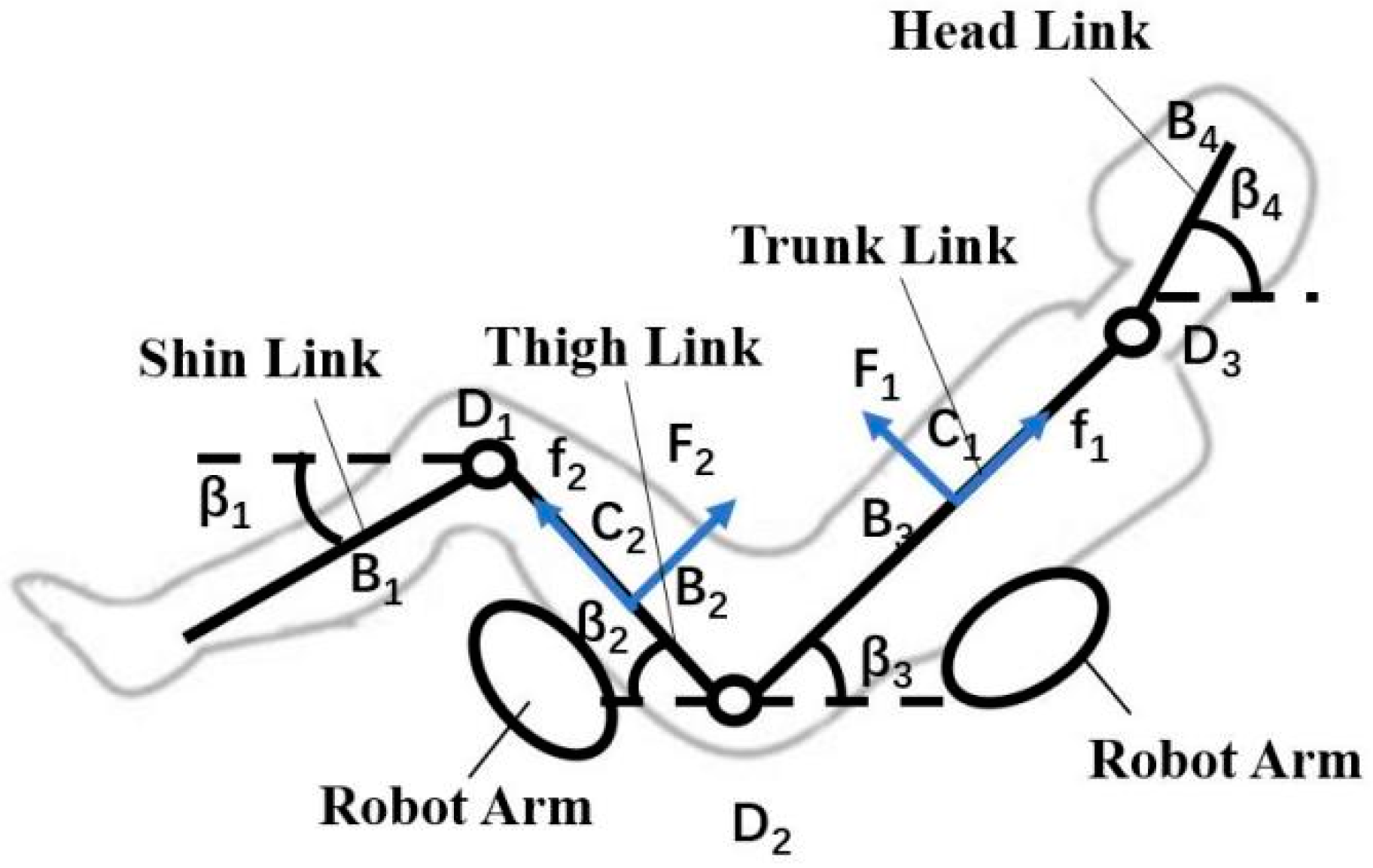
At this point, Tekscan pressure sensors are placed between the human and the robot. These pressure sensors have pressure-sensitive resistors, which exhibit a proportional decrease in resistance as pressure increases. By utilizing the internal scanning circuitry of the pressure sensors, pressure information at the pressure-sensitive points can be obtained, thereby allowing the determination of the pressure
F1 between the human back and the robot. Additionally, the angles
β1,
β2,
β3, and
β4 between the human shins, thighs, trunk, and head with respect to the horizontal plane and the distance between the robotic arm and the hip joint are known through the use of the Optitrack motion capture system and relevant calculations. At this stage, there are six unknowns, the pressure
F2 between the human legs and the robotic arm, the frictional forces
f1 and
f2 between the human back and thighs with the robot, and the internal moments
M1,
M2, and
M3 at the human knee, hip, and neck joints, respectively. By substituting the known values into Equations (1)–(6), real-time interaction forces and internal moments between the human and the robot can be determined, as illustrated in
Figure 10a,b.
Through an analysis of the simulation results from the robot transfer process and questionnaire data from the transfer experiments, the majority of the subjects indicated that during the experiment, the influence of the hip joint internal torque on human comfort was greater than that of the normal force, friction force, and the internal torques of the knee and neck joints. Furthermore, the difference in their impact on comfort was quite significant. Thus, different values were assigned to the coefficients ω of each evaluation index to give different weights to each component.
The results from the comfort weight questionnaire are shown in
Figure 11. It can be seen from the survey results that all seven subjects believed that the hip joint torque had a greater effect on comfort. In addition, subjects felt that the impact of hip joint torque on comfort was greater than that of the knee and neck joints. The effect of normal and frictional forces on the leg on comfort was considered less than on the back, which aligns with literature suggesting that the back is more sensitive than the legs [
21]. Therefore, the parameter
ω6 for the hip joint was taken as 15, while the other parameters
ωi were obtained by averaging the results of the comfort weight questionnaire for the seven subjects. Consequently, the set
ω was determined to be [3, 2, 4, 2, 4, 15, 4].
Upon determining the parameter values for the comfort evaluation function, these parameters
n = [1, 1, 1, 1, 1, 1, 1] and
ω = [3, 2, 4, 2, 4, 15, 4] were integrated into the comfort evaluation function, as in Equation (11). By performing these calculations, the comfort evaluation value for each instant can be obtained, as demonstrated in
Figure 12. With time as the horizontal axis, the transparent black line represents real-time comfort evaluation function values that have undergone normalization, while the solid black curve depicts the fitted normalized comfort evaluation function curve.
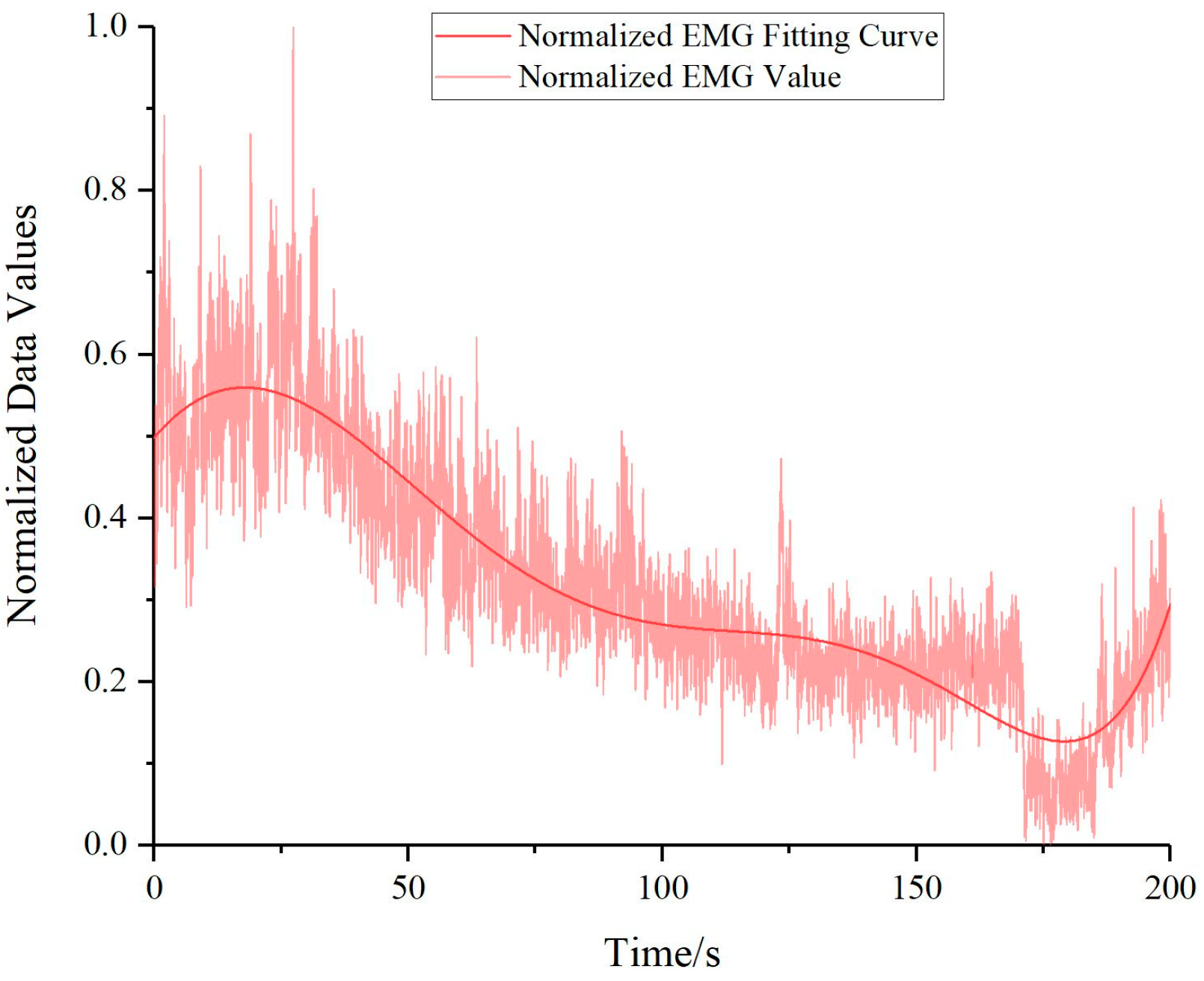
Surface electromyographic signals of the erector spinae, adductor, and tensor fasciae latae muscles were captured using a Noraxon electromyography sensor. Given that the preservation of hip joint posture during the transfer process necessitates a collective effort of back and leg muscles, a balanced 50% of the electromyographic data was drawn from each of these muscle groups. Specifically, data derived from the erector spinae accounted for the back muscle electromyographic information, whereas data derived from the adductor and tensor fasciae latae represented the leg muscles’ electromyographic information. As a result, an amalgamated electromyographic signal value was generated, consisting of 50% from the erector spinae, and 25% from both the adductor and tensor fasciae latae muscles.
The sEMG data obtained through the Noraxon surface electromyography sensors were subjected to rectification, filtration, and mean feature extraction, resulting in sEMG information that represents muscle comfort. However, at this point, the unit of the sEMG information is measured in microvolts (μV), while the units of the normalized comfort evaluation function values and their fitting curves are dimensionless (“1”), as the unit of each term in Equation (11) has been canceled out to “1”. To facilitate a better comparison of sEMG information with comfort evaluation consistency, we conducted a normalization process on the sEMG data, which transformed the unit of the sEMG information into dimensionless (“1”) after normalization. The results of which are portrayed in
Figure 13.
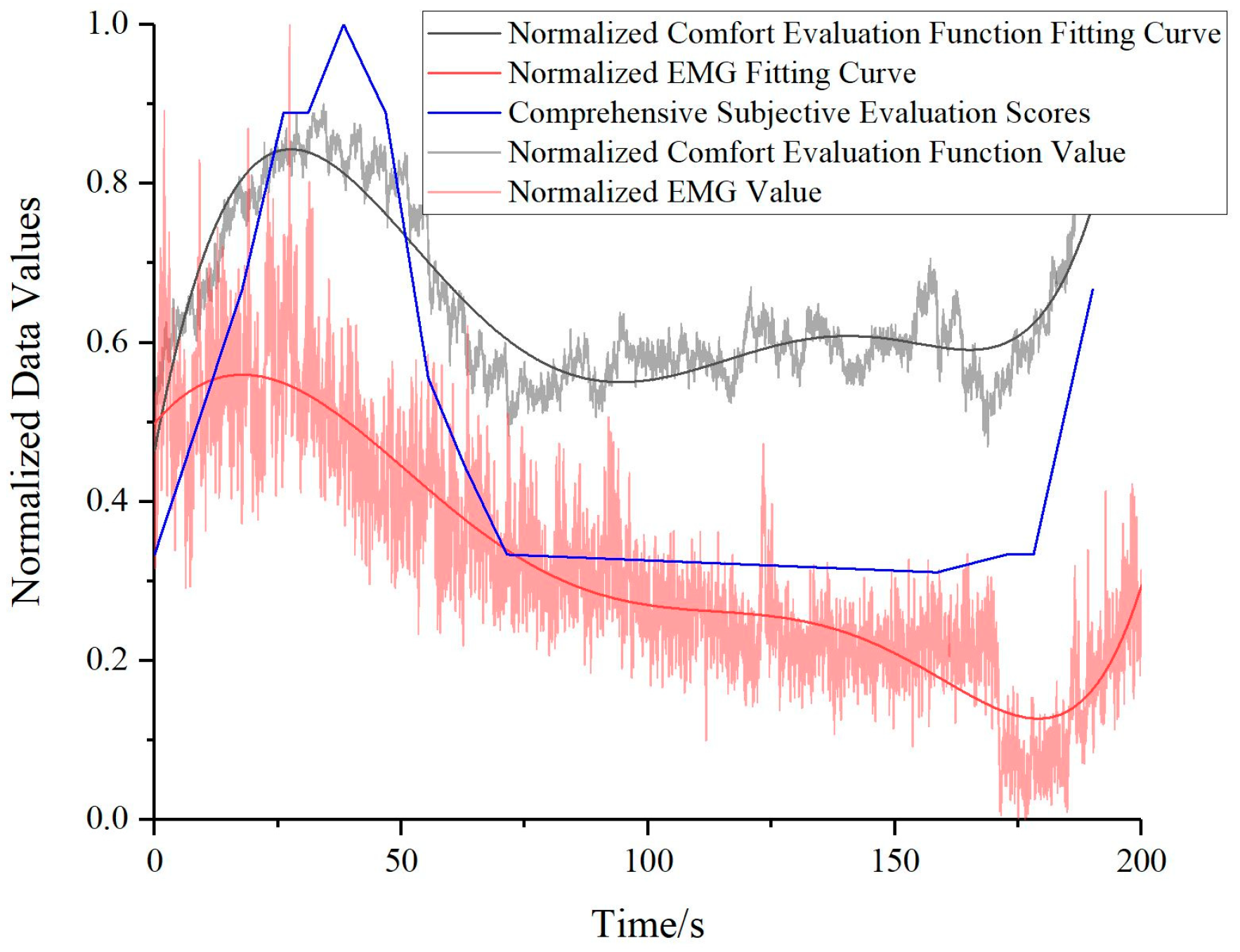
The comfort evaluation function values, the comprehensive subjective questionnaire evaluation scores, and the electromyographic signal values, all having undergone normalization procedures, are juxtaposed for comparison, as depicted in
Figure 14. Evidently, the subjective assessment scores correspond closely with the comfort evaluation function values. Moreover, a similar trend is discernible between the comfort evaluation function and the fluctuations in the sEMG signals, although a more in-depth analysis is requisite for discerning the subtleties of these trend variations.
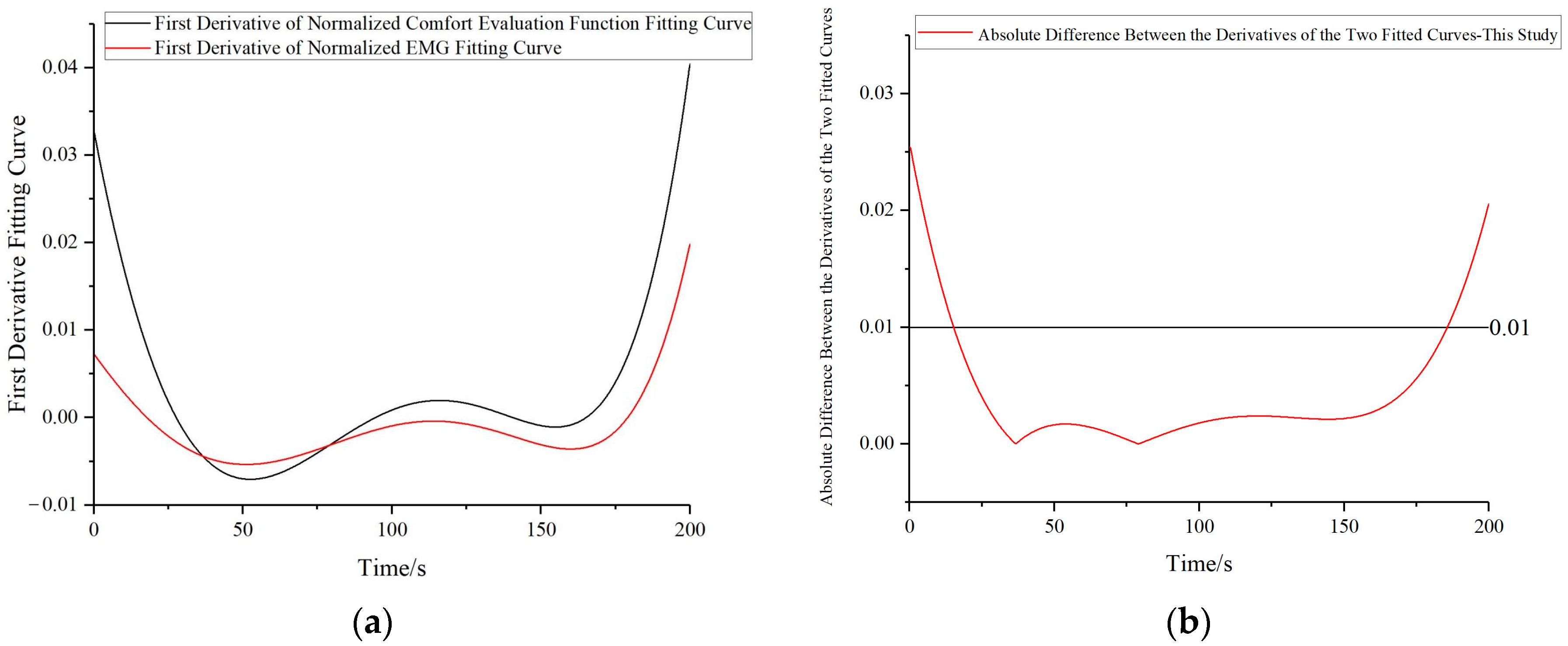
To provide an objective assessment of the proposed method, we performed curve fitting on the comfort evaluation function values and sEMG information and compared their trends by taking the first derivative, the results are illustrated in
Figure 15a. There is a marked concurrence in the trends emerging from both derivative curves. Subsequently, the disparities between the derivatives of the two fitted curves are computed. Specifically, after obtaining the first derivative curves of the two fitted curves, 1000 points were extracted separately from each first derivative curve corresponding to the same abscissa values for both curves. Subsequently, the absolute differences between the corresponding points were calculated, resulting in 1000 data points. Portions wherein the absolute value of the difference falls under 0.01 suggest minor variations in the trends, whereas segments exceeding 0.01 indicate considerable divergences in trends, as showcased in
Figure 15b. Hence, it can be deduced that an agreement of 85.1% exists between the trends of the two curves.
Comparisons between the normalized comfort evaluation methodology proposed in this study and that presented in existing research [
13], yield two curves depicting normalized comfort evaluations and normalized electromyography signal patterns, as demonstrated in
Figure 16a. Likewise, first-order derivatives are computed for the fitted curves derived from both the comfort evaluation function values and EMG signal values in this study, as well as those presented in existing research. Absolute differences between these derivatives are calculated and presented in
Figure 16b. The trends in the existing research concur at a rate of 70.0%, whereas those in this study display a notably higher agreement rate of 85.1%. Thus, the accuracy of the statics solution methodology and comfort evaluation methodology proposed in this study is effectively substantiated.
This study proposed a mechanics model solving method based on real-time position and pressure information to address the problem of insolubility in the human–robot mechanical model during human transfer processes. By introducing the comfort evaluation function and validating it through subjective questionnaires and sEMG information, we have established a reliable method for assessing human transfer comfort. This evaluation method exhibits objectivity and accuracy, avoiding the randomness associated with fully subjective evaluations and enhancing the reliability of the comfort assessment. Furthermore, this method lays the foundation for ensuring human comfort in human–robot interactions, thereby possessing promising potential in care robot applications.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}