
Teleoperated Surgical Robot with Adaptive Interactive Control Architecture for Tissue Identification


Abstract
:1. Introduction
2. Methods
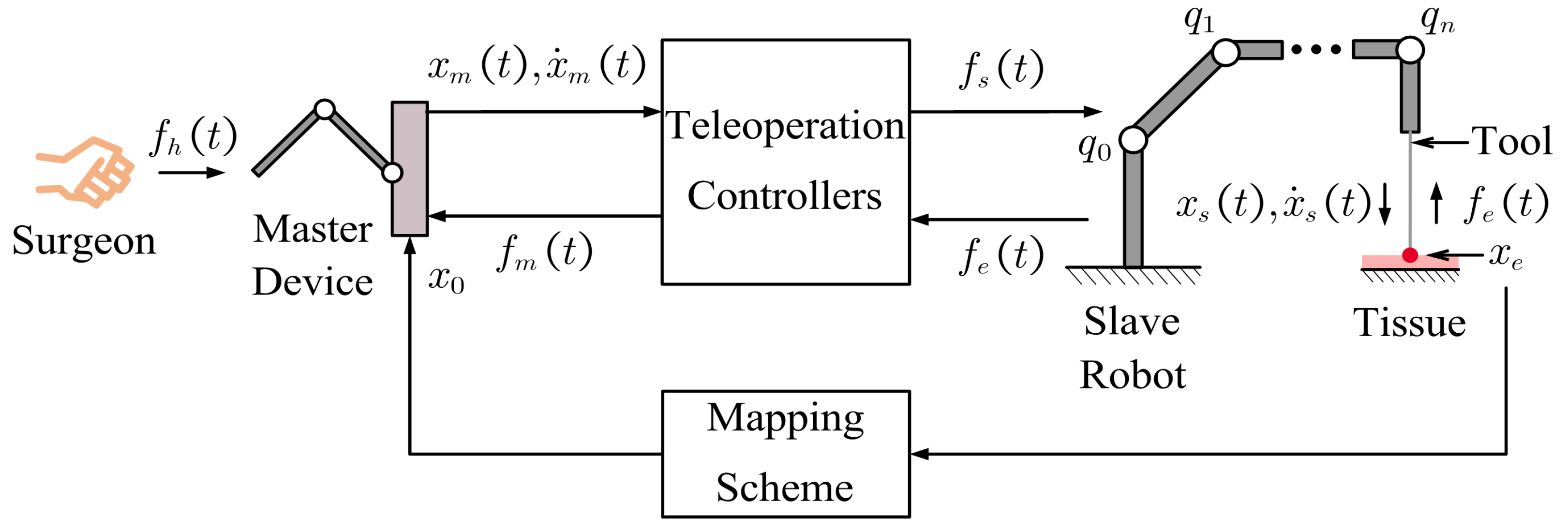
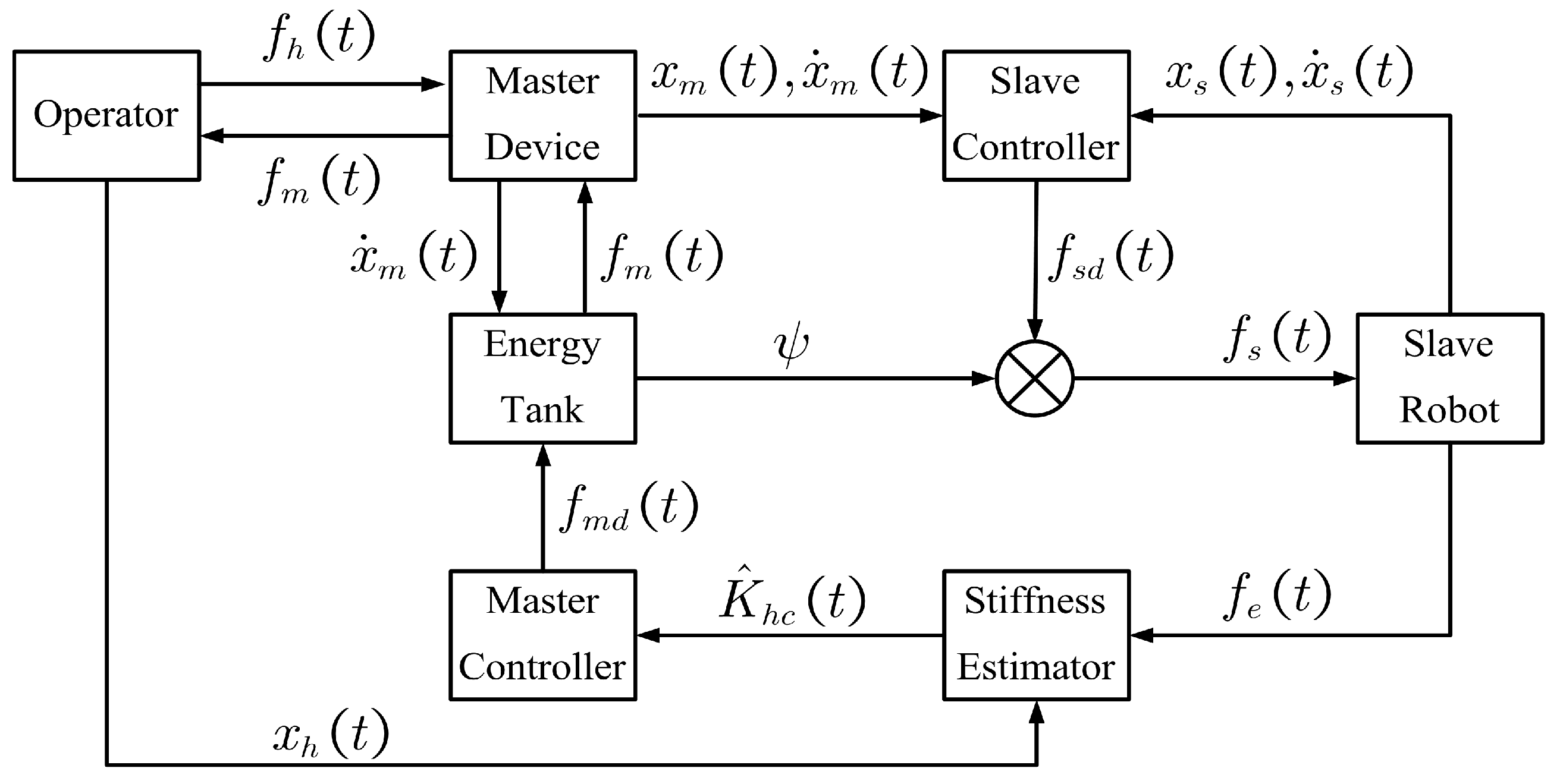
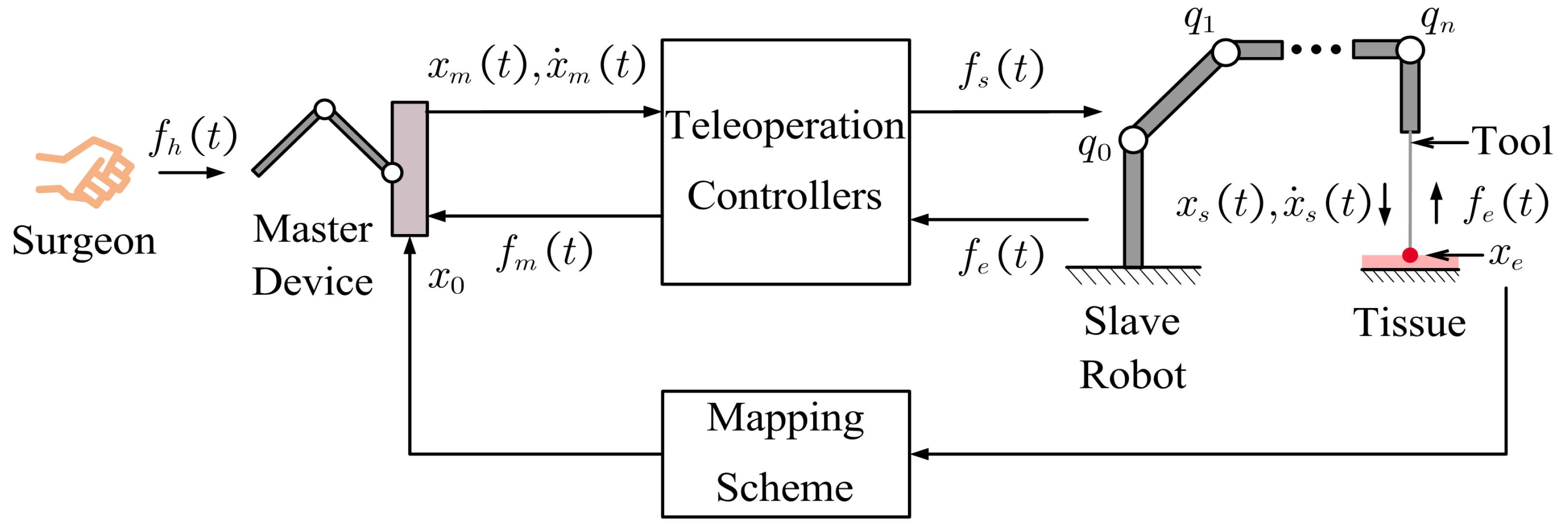
2.1. Teleoperation Bilateral Contact Model
2.2. Teleoperation Mapping Scheme
2.3. Interaction Force Model
2.4. The Ideal Interaction Situation
2.5. Stiffness Estimation
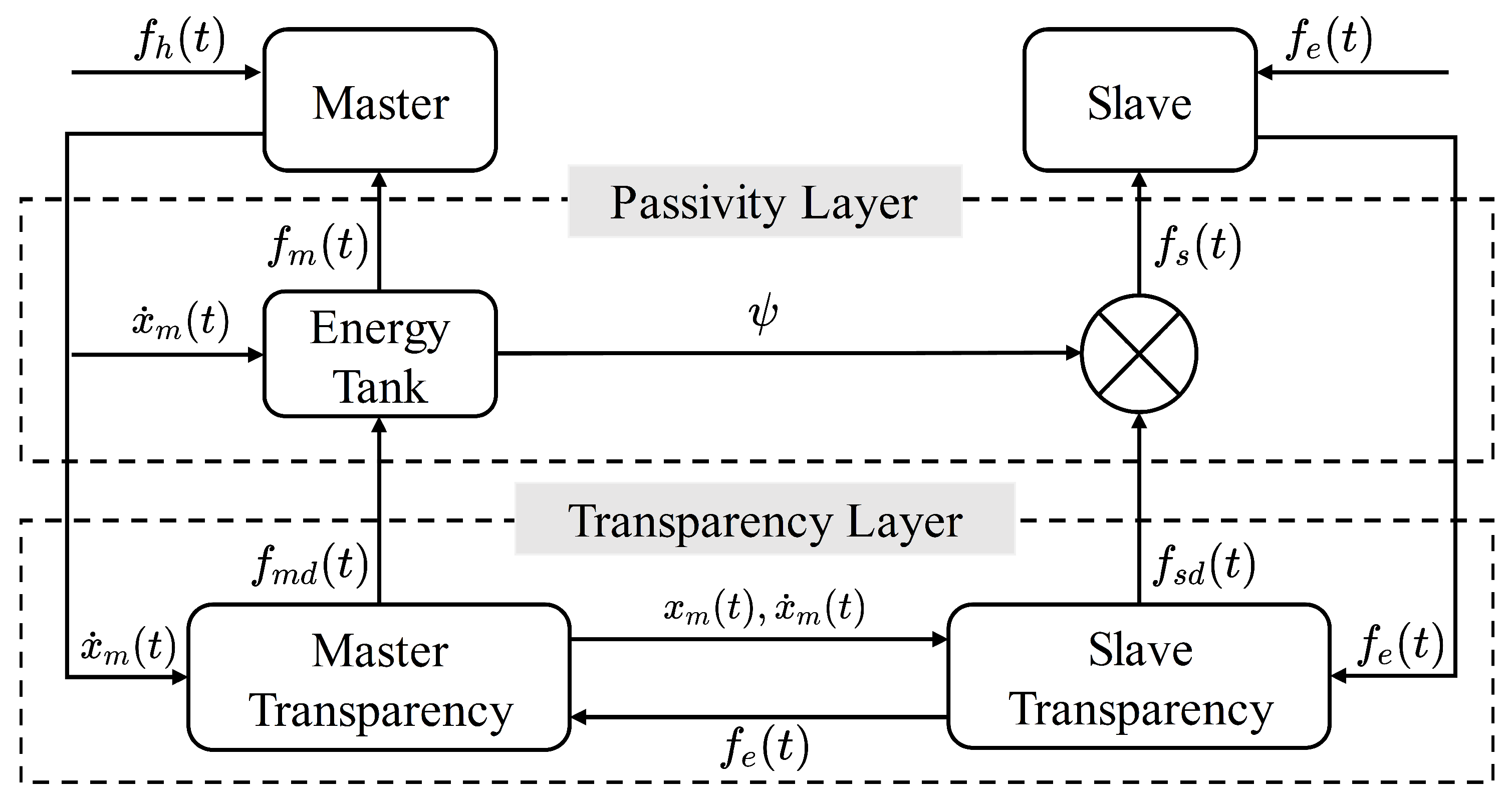
2.6. Desired Teleoperation Controllers
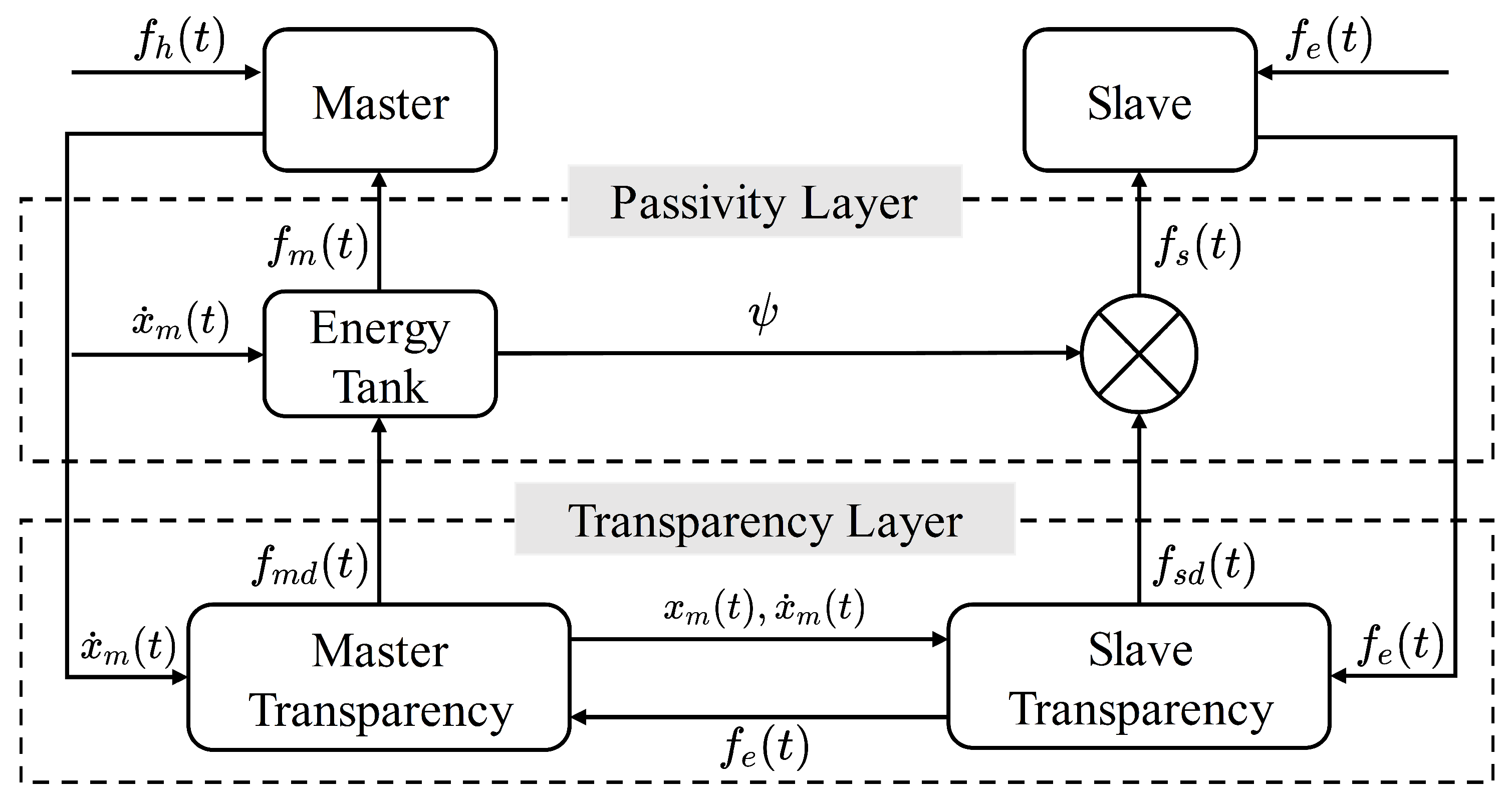
2.7. Passivity Analysis
3. Experiments and Results
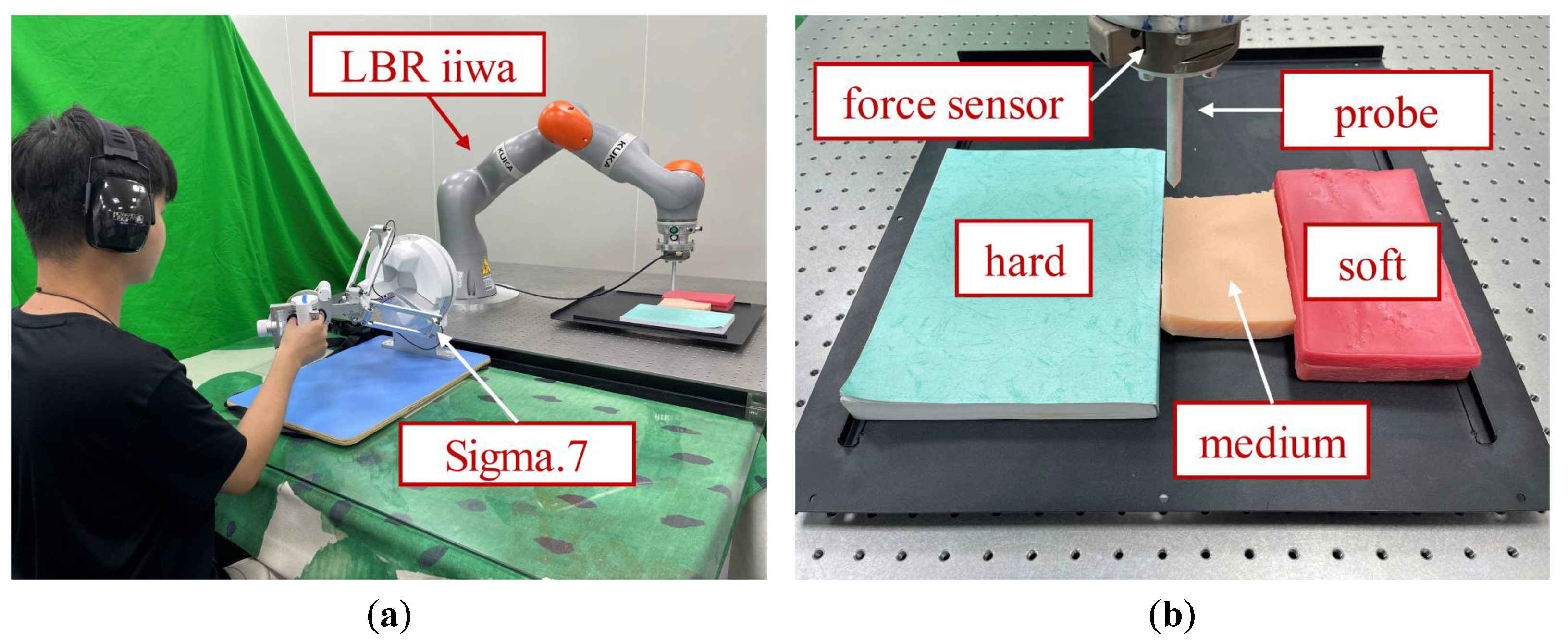
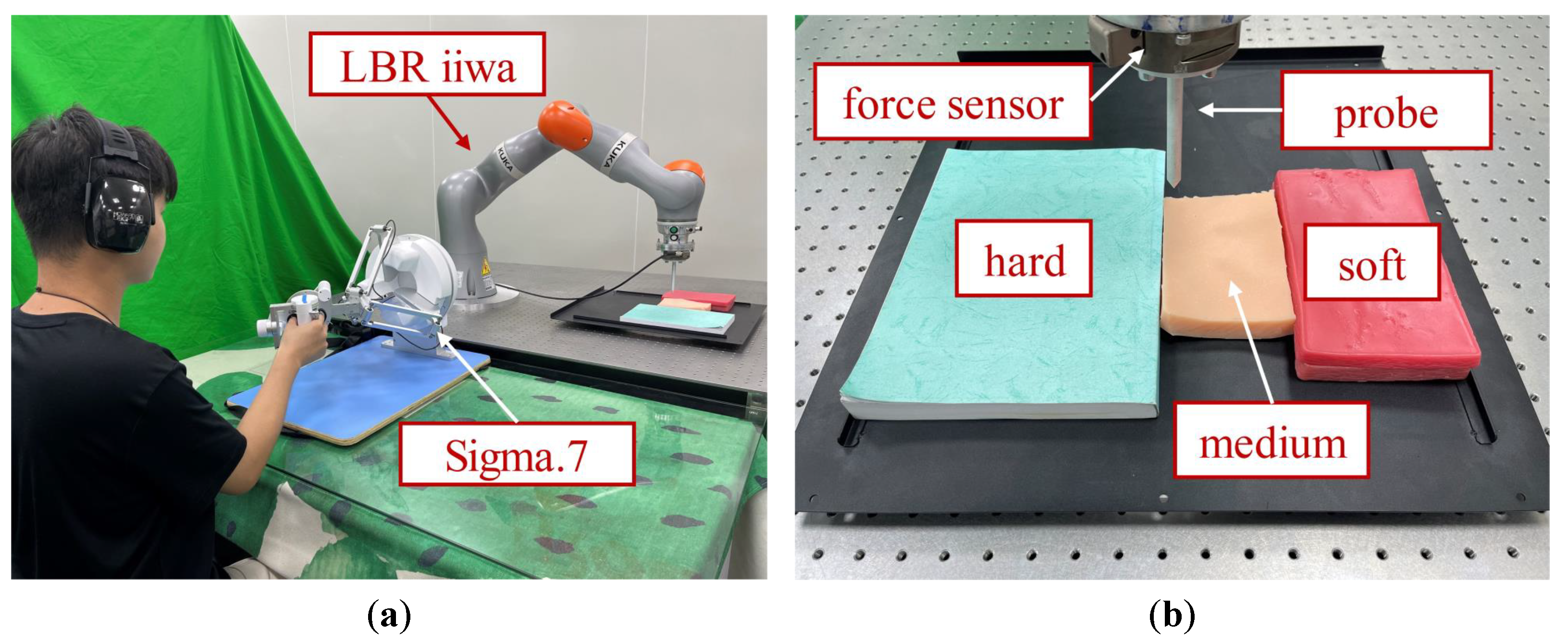
3.1. Hardware Setup
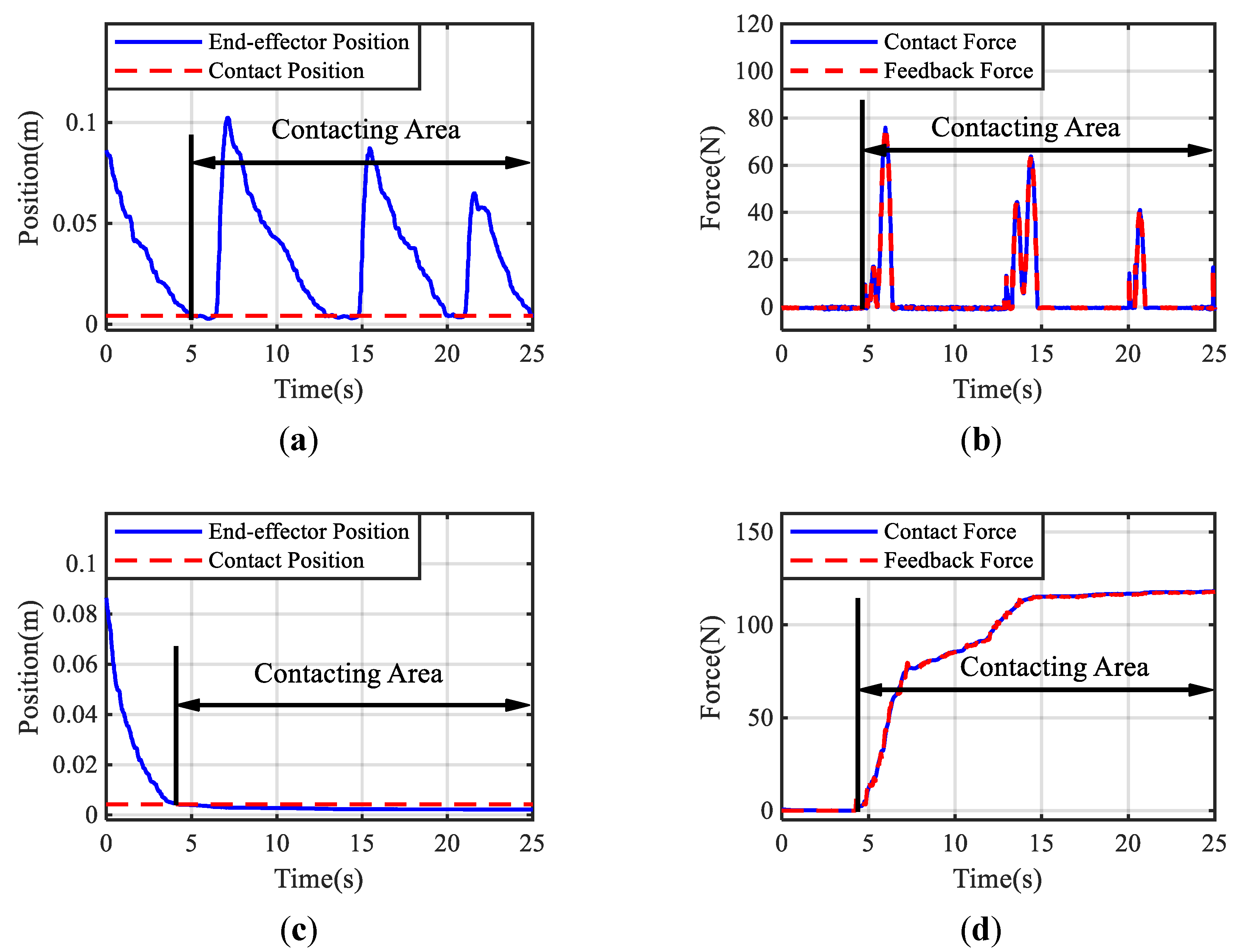
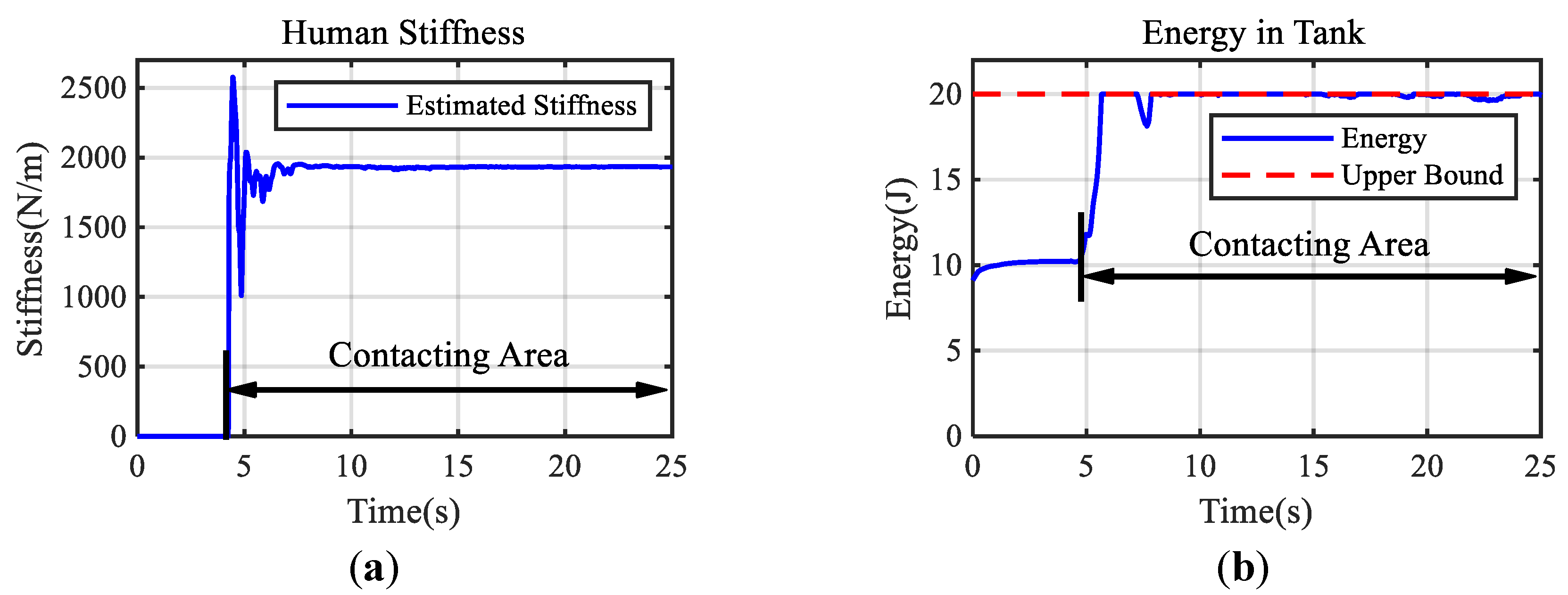
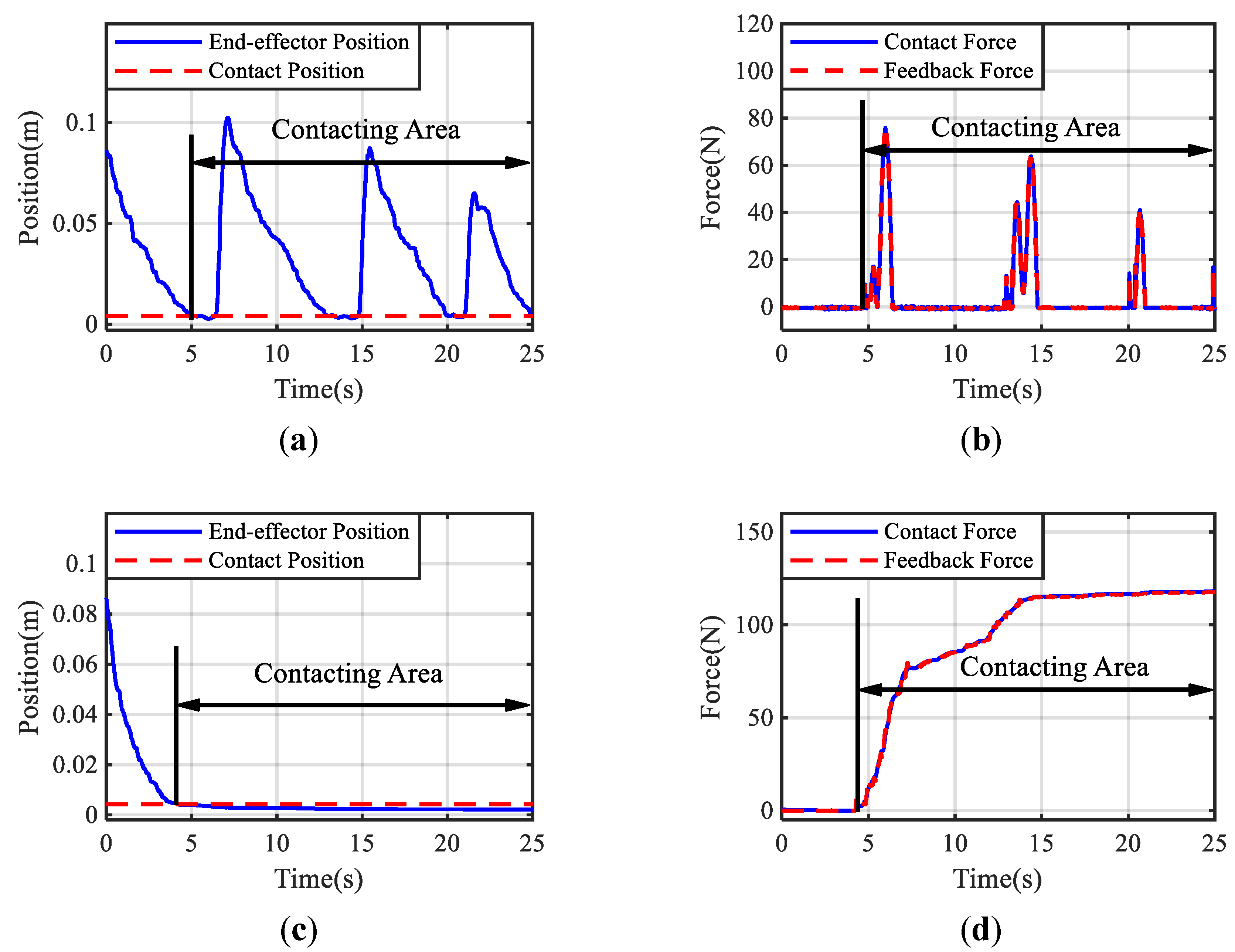
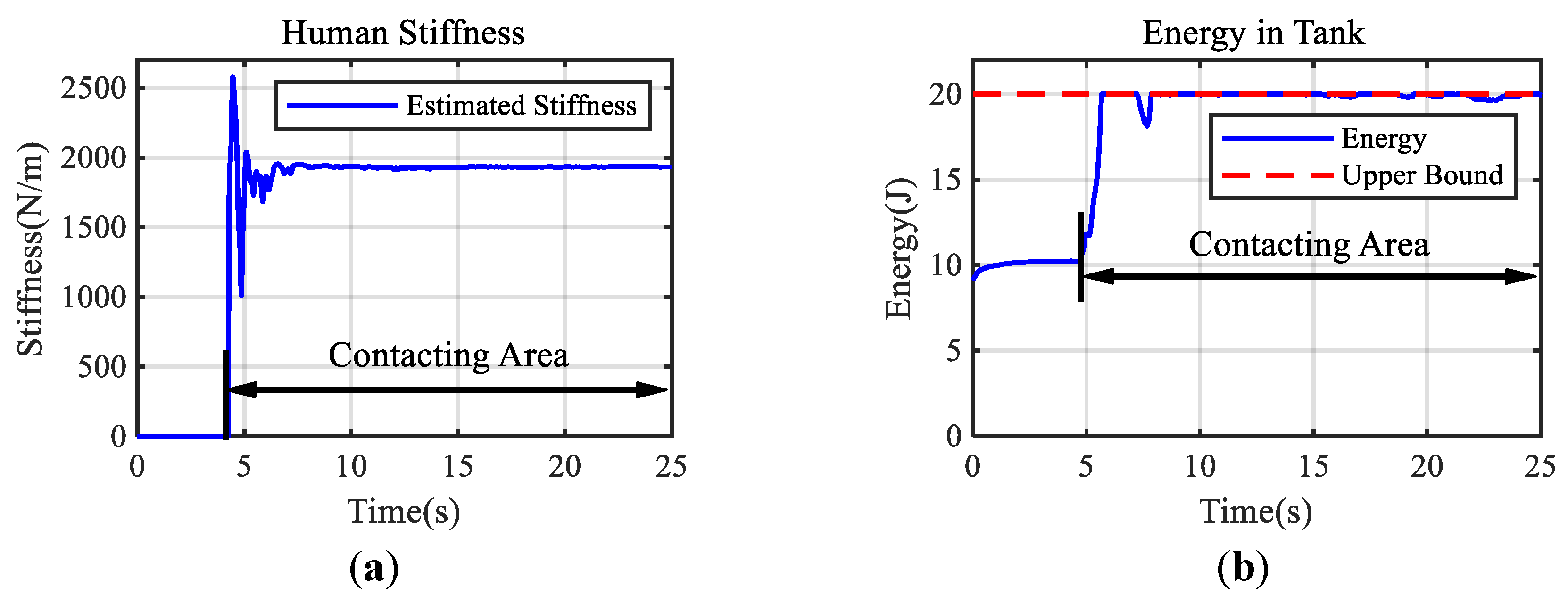
3.2. Stable Contact Test
3.2.1. Hypotheses
3.2.2. Results
3.3. Human Subject Experiments
3.3.1. Participant Recruitment
3.3.2. Experimental Conditions
3.3.3. Procedure
3.3.4. Metrics
3.3.5. Hypotheses
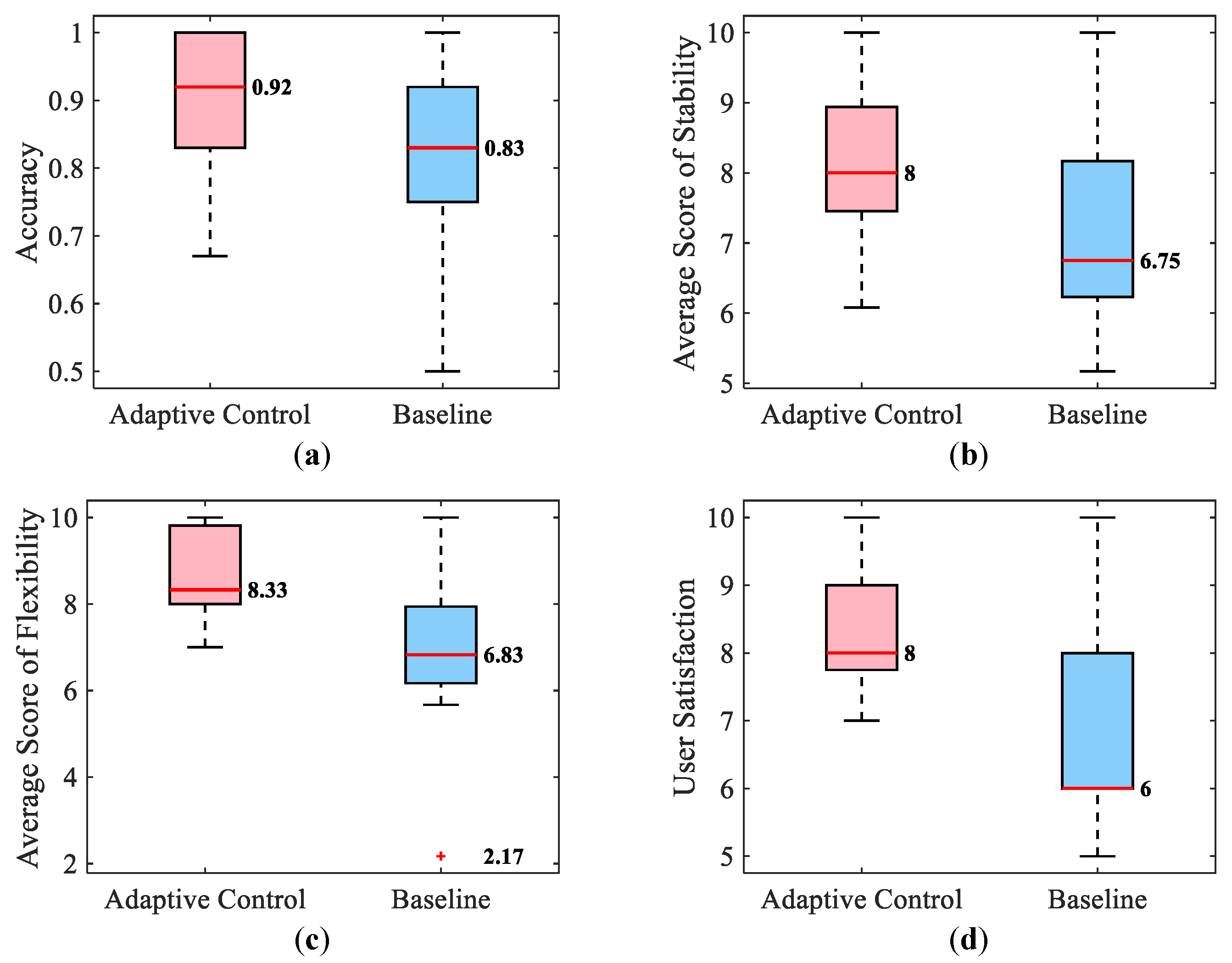
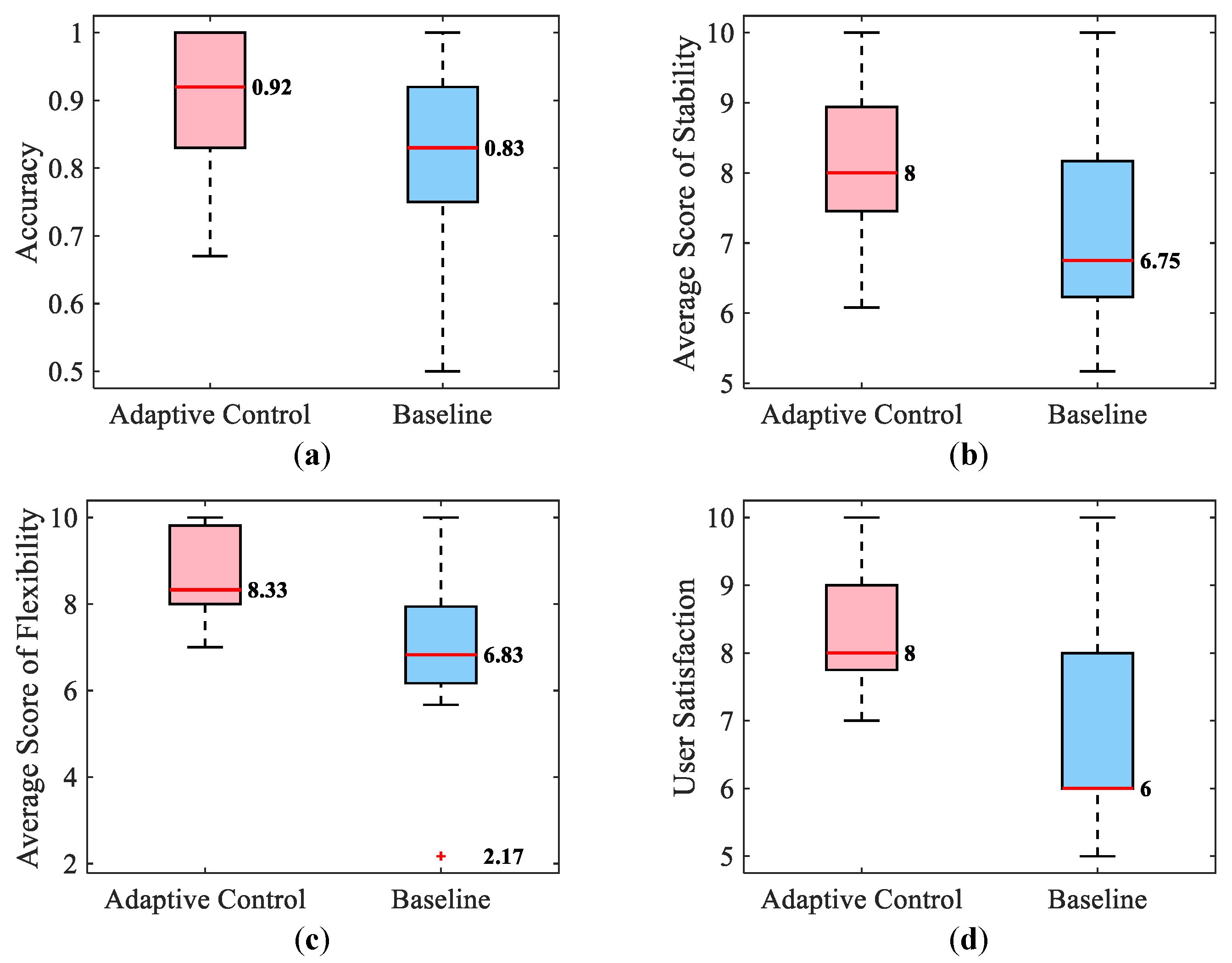
3.3.6. Subjective Results
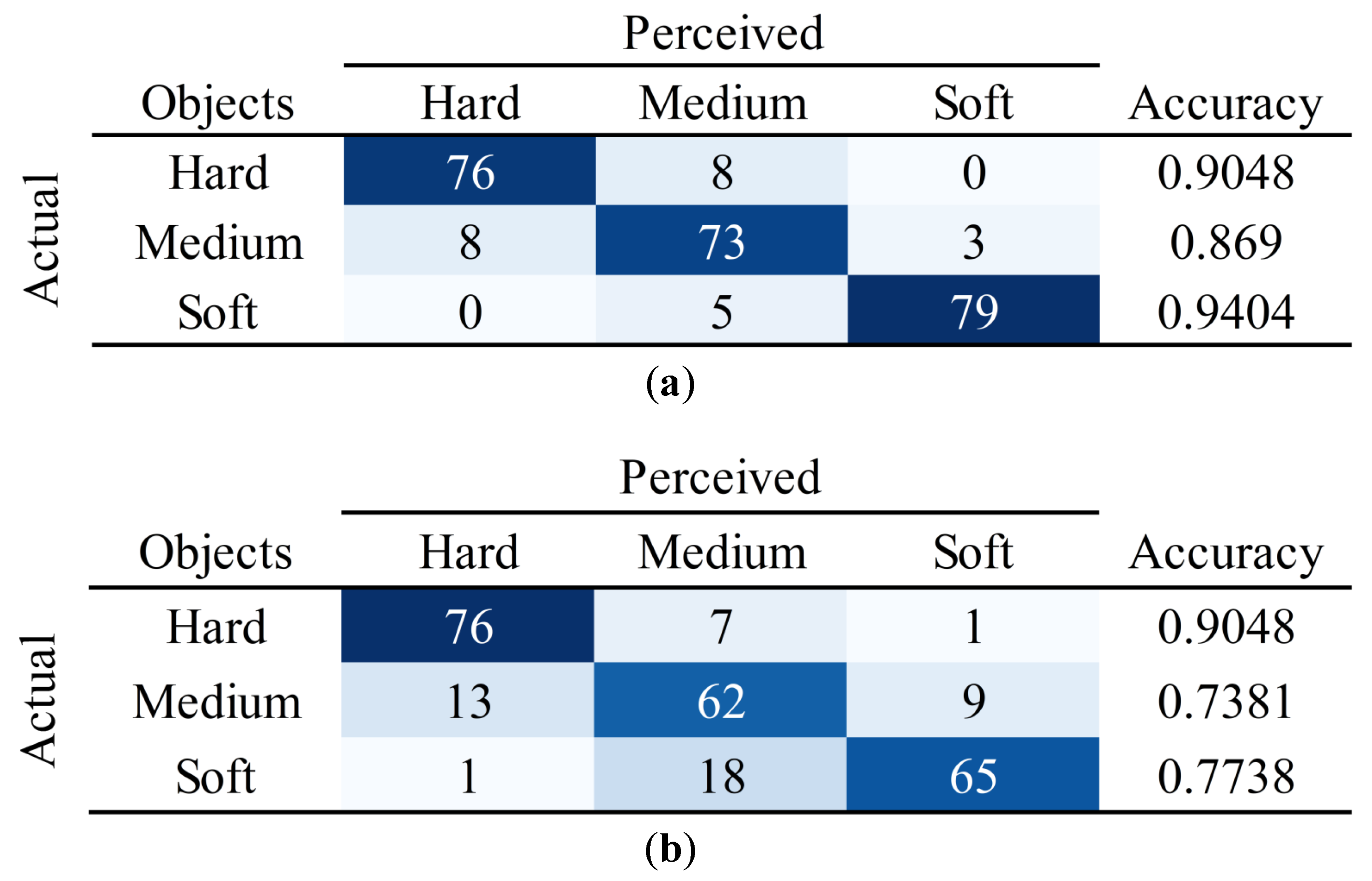
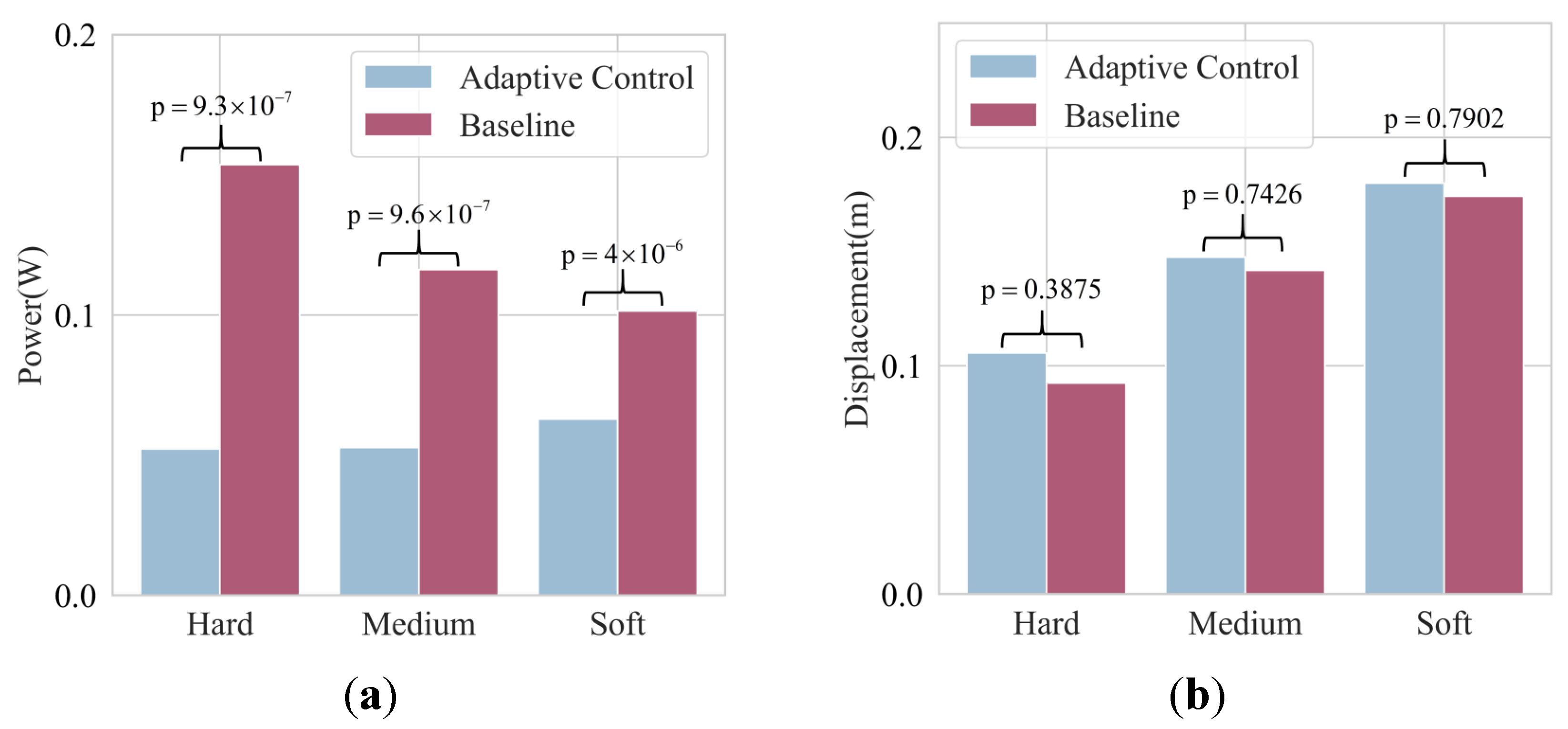
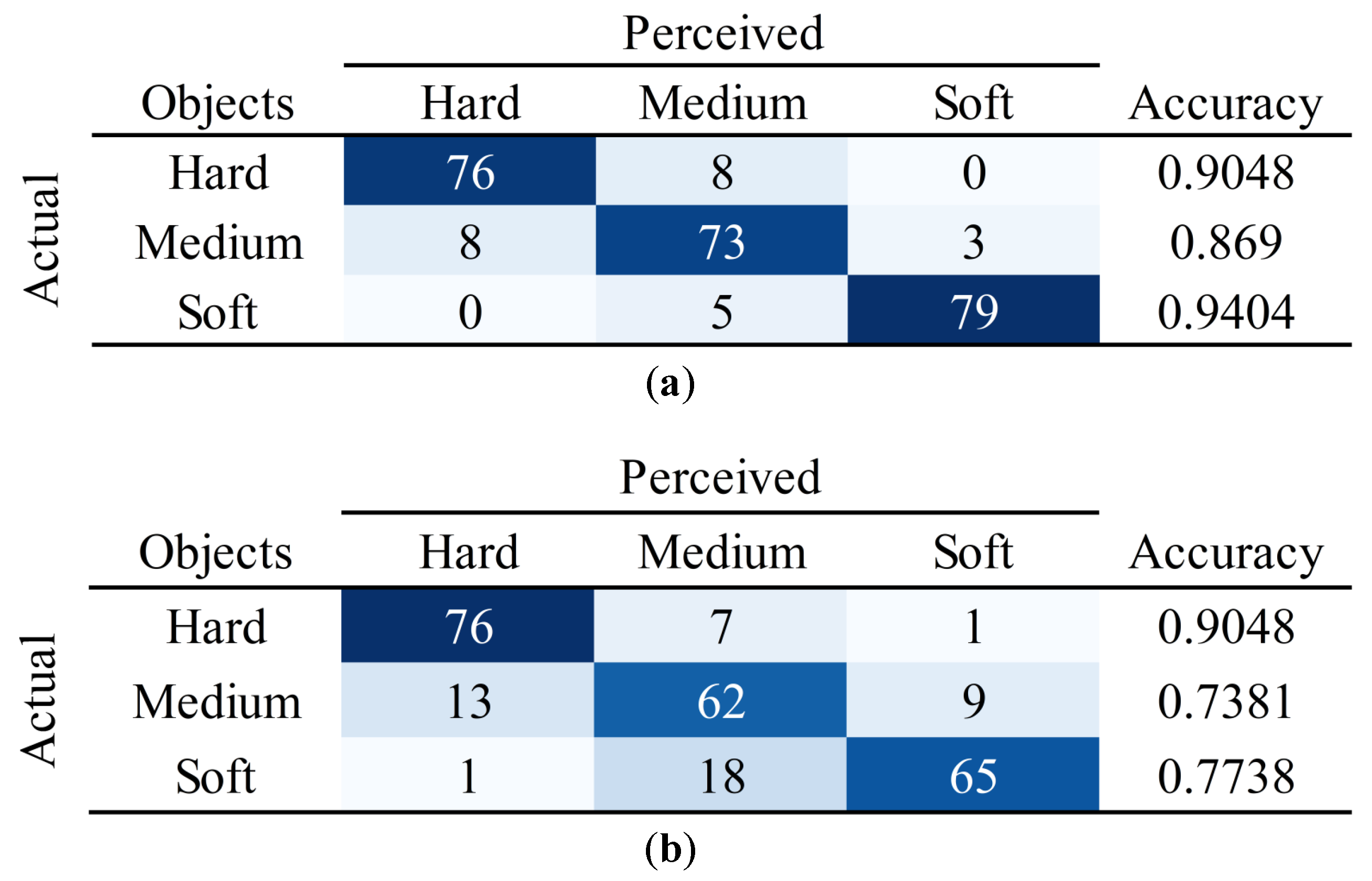
3.3.7. Quantitative Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| RLS | Recursive Least Square |
| TDPA | Time Domain Passivity Approach |
| ROS | Robot Operating System |
References
- Khatib, Y.X.; Yeh, X.; Brantner, G.; Soe, B.; Kim, B.; Ganguly, S.; Stuart, H.; Wang, S.; Cutkosky, M.; Edsinger, A.; et al. Ocean one: A robotic avatar for oceanic discovery. IEEE Robot. Autom. Mag. 2016, 23, 20–29. [Google Scholar] [CrossRef]
- Desbats, P.; Geffard, F.; Piolain, G.; Coudray, A. Force-feedback teleoperation of an industrial robot in a nuclear spent fuel reprocessing plant. Ind. Robot. Int. J. 2006, 33, 178–186. [Google Scholar] [CrossRef]
- Trochimczuk, R.; Łukaszewicz, A.; Mikołajczyk, T.; Aggogeri, F.; Borboni, A. Finite element method stiffness analysis of a novel telemanipulator for minimally invasive surgery. Simulation 2019, 95, 1015–1025. [Google Scholar] [CrossRef]
- Tsang, R.K.; Holsinger, F.C. Transoral endoscopic nasopharyngectomy with a flexible next-generation robotic surgical system. Laryngoscope 2016, 126, 2257–2262. [Google Scholar] [CrossRef]
- Bao, X.; Guo, S.; Guo, Y.; Yang, C.; Shi, L.; Li, Y.; Jiang, Y. Multilevel operation strategy of a vascular interventional robot system for surgical safety in teleoperation. IEEE Trans. Robot. 2022, 38, 2238–2250. [Google Scholar] [CrossRef]
- Yamamoto, T.; Vagvolgyi, B.; Balaji, K.; Whitcomb, L.L.; Okamura, A.M. Tissue property estimation and graphical display for teleoperated robot-assisted surgery. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 4239–4245. [Google Scholar]
- Mahvash, M.; Gwilliam, J.; Agarwal, R.; Vagvolgyi, B.; Su, L.M.; Yuh, D.D.; Okamura, A.M. Force-feedback surgical teleoperator: Controller design and palpation experiments. In Proceedings of the 2008 Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, Reno, NV, USA, 13–14 March 2008; pp. 465–471. [Google Scholar]
- Pacchierotti, C.; Tirmizi, A.; Prattichizzo, D. Improving transparency in teleoperation by means of cutaneous tactile force feedback. ACM Trans. Appl. Percept. 2014, 11, 4. [Google Scholar] [CrossRef]
- Yokokohji, Y.; Yoshikawa, T. Bilateral control of master-slave manipulators for ideal kinesthetic coupling-formulation and experiment. IEEE Trans. Robot. Autom. 1994, 10, 605–620. [Google Scholar] [CrossRef]
- Salcudean, S.E.; Zhu, M.; Zhu, W.H.; Hashtrudi-Zaad, K. Transparent bilateral teleoperation under position and rate control. Int. J. Robot. Res. 2000, 19, 1185–1202. [Google Scholar] [CrossRef]
- Lawrence, D.A. Stability and transparency in bilateral teleoperation. IEEE Trans. Robot. Autom. 1993, 9, 624–637. [Google Scholar] [CrossRef]
- Tzafestas, C.; Velanas, S.; Fakiridis, G. Adaptive impedance control in haptic teleoperation to improve transparency under time-delay. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 212–219. [Google Scholar]
- Misra, S.; Okamura, A.M. Environment parameter estimation during bilateral telemanipulation. In Proceedings of the 2006 14th Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, Alexandria, VA, USA, 25–26 March 2006; pp. 301–307. [Google Scholar]
- Diolaiti, N.; Melchiorri, C.; Stramigioli, S. Contact impedance estimation for robotic systems. IEEE Trans. Robot. 2005, 21, 925–935. [Google Scholar] [CrossRef]
- Jeon, S.; Harders, M. Haptic tumor augmentation: Exploring multi-point interaction. IEEE Trans. Haptics 2014, 7, 477–485. [Google Scholar] [CrossRef]
- Cho, J.H.; Son, H.I.; Lee, D.G.; Bhattacharjee, T.; Lee, D.Y. Gain-scheduling control of teleoperation systems interacting with soft tissues. IEEE Trans. Ind. Electron. 2012, 60, 946–957. [Google Scholar] [CrossRef]
- Pappalardo, A.; Albakri, A.; Liu, C.; Bascetta, L.; De Momi, E.; Poignet, P. Hunt–crossley model based force control for minimally invasive robotic surgery. Biomed. Signal Process. Control 2016, 29, 31–43. [Google Scholar] [CrossRef]
- Su, H.; Schmirander, Y.; Li, Z.; Zhou, X.; Ferrigno, G.; De Momi, E. Bilateral teleoperation control of a redundant manipulator with an rcm kinematic constraint. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 4477–4482. [Google Scholar]
- Kuchenbecker, K.J.; Niemeyer, G. Induced Master Motion in Force-Reflecting Teleoperation. J. Dyn. Syst. Meas. Control 2006, 128, 800–810. [Google Scholar] [CrossRef]
- Polushin, I.G.; Liu, X.P.; Lung, C.H. Stability of bilateral teleoperators with generalized projection-based force reflection algorithms. Automatica 2012, 48, 1005–1016. [Google Scholar] [CrossRef]
- Polushin, I.G.; Liu, P.X.; Lung, C.H. A force-reflection algorithm for improved transparency in bilateral teleoperation with communication delay. IEEE/ASME Trans. Mechatronics 2007, 12, 361–374. [Google Scholar] [CrossRef]
- Daniel, R.; McAree, P.R. Fundamental limits of performance for force reflecting teleoperation. Int. J. Robot. Res. 1998, 17, 811–830. [Google Scholar] [CrossRef]
- Hannaford, B.; Ryu, J.H. Time-domain passivity control of haptic interfaces. IEEE Trans. Robot. Autom. 2002, 18, 1–10. [Google Scholar] [CrossRef]
- Ryu, J.H.; Kwon, D.S.; Hannaford, B. Stable teleoperation with time-domain passivity control. IEEE Trans. Robot. Autom. 2004, 20, 365–373. [Google Scholar] [CrossRef]
- Franken, M.; Stramigioli, S.; Misra, S.; Secchi, C.; Macchelli, A. Bilateral telemanipulation with time delays: A two-layer approach combining passivity and transparency. IEEE Trans. Robot. 2011, 27, 741–756. [Google Scholar] [CrossRef]
- Ferraguti, F.; Preda, N.; Manurung, A.; Bonfe, M.; Lambercy, O.; Gassert, R.; Muradore, R.; Fiorini, P.; Secchi, C. An energy tank-based interactive control architecture for autonomous and teleoperated robotic surgery. IEEE Trans. Robot. 2015, 31, 1073–1088. [Google Scholar] [CrossRef]
- Heck, D.J.; Saccon, A.; Nijmeijer, H. A two-layer architecture for force-reflecting bilateral teleoperation with time delays. In Proceedings of the 2015 54th IEEE Conference on Decision and Control (CDC), Osaka, Japan, 15–18 December 2015; pp. 1509–1514. [Google Scholar]
- Heck, D.; Saccon, A.; Beerens, R.; Nijmeijer, H. Direct force-reflecting two-layer approach for passive bilateral teleoperation with time delays. IEEE Trans. Robot. 2018, 34, 194–206. [Google Scholar] [CrossRef]
- Luo, J.; Huang, D.; Li, Y.; Yang, C. Trajectory online adaption based on human motion prediction for teleoperation. IEEE Trans. Autom. Sci. Eng. 2021, 19, 3184–3191. [Google Scholar] [CrossRef]
- Qi, W.; Ovur, S.E.; Li, Z.; Marzullo, A.; Song, R. Multi-sensor guided hand gesture recognition for a teleoperated robot using a recurrent neural network. IEEE Robot. Autom. Lett. 2021, 6, 6039–6045. [Google Scholar] [CrossRef]
- Narayanan, V.K.; Spalanzani, A.; Babel, M. A semi-autonomous framework for human-aware and user intention driven wheelchair mobility assistance. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 4700–4707. [Google Scholar]
- Ferraguti, F.; Secchi, C.; Fantuzzi, C. A tank-based approach to impedance control with variable stiffness. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 4948–4953. [Google Scholar]
- Khatib, O. A unified approach for motion and force control of robot manipulators: The operational space formulation. IEEE J. Robot. Autom. 1987, 3, 43–53. [Google Scholar] [CrossRef]
- Xing, X.; Maqsood, K.; Huang, D.; Yang, C.; Li, Y. Iterative Learning-Based Robotic Controller With Prescribed Human-Robot Interaction Force. IEEE Trans. Autom. Sci. Eng. 2021, 19, 3395–3408. [Google Scholar] [CrossRef]
- Cobb, M.K.; Barton, K.; Fathy, H.; Vermillion, C. Iterative learning-based path optimization for repetitive path planning, with application to 3-d crosswind flight of airborne wind energy systems. IEEE Trans. Control Syst. Technol. 2019, 28, 1447–1459. [Google Scholar] [CrossRef]
- Michel, Y.; Rahal, R.; Pacchierotti, C.; Giordano, P.R.; Lee, D. Bilateral teleoperation with adaptive impedance control for contact tasks. IEEE Robot. Autom. Lett. 2021, 6, 5429–5436. [Google Scholar] [CrossRef]
- Qi, W.; Aliverti, A. A multimodal wearable system for continuous and real-time breathing pattern monitoring during daily activity. IEEE J. Biomed. Health Inform. 2019, 24, 2199–2207. [Google Scholar] [CrossRef]
- Laghi, M.; Ajoudani, A.; Catalano, M.G.; Bicchi, A. Unifying bilateral teleoperation and tele-impedance for enhanced user experience. Int. J. Robot. Res. 2020, 39, 514–539. [Google Scholar] [CrossRef]
- Su, H.; Qi, W.; Chen, J.; Zhang, D. Fuzzy approximation-based task-space control of robot manipulators with remote center of motion constraint. IEEE Trans. Fuzzy Syst. 2022, 30, 1564–1573. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Question | |
|---|---|
| Accuracy | Which object do you think is on the slave side? |
| Stability | How would you rate the stability of the system from 0 to 10 according to the degree of recoiling that you felt during the trial? |
| Flexibility | How would you rate the flexibility of the system from 0 to 10 according to the smoothness of moving the master device during the trial? |
| Satisfaction | How would you rate your satisfaction with the system from 0 to 10? |
| Metric | Adaptive Control | Baseline | p-Value |
|---|---|---|---|
| Accuracy | 0.901 | 0.801 | 0.0136 |
| Contact Stability | 8.194 | 7.196 | 0.0153 |
| Flexibility | 8.681 | 6.953 | |
| Satisfaction | 8.190 | 6.953 | 0.0014 |
| Adaptive Control | Baseline | |
|---|---|---|
| Hard | 2.601 | 0.6409 |
| Medium | 2.9447 | 0.1543 |
| Soft | 1.415 | 0.1194 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sheng, Y.; Cheng, H.; Wang, Y.; Zhao, H.; Ding, H. Teleoperated Surgical Robot with Adaptive Interactive Control Architecture for Tissue Identification. Bioengineering 2023, 10, 1157. https://doi.org/10.3390/bioengineering10101157
Sheng Y, Cheng H, Wang Y, Zhao H, Ding H. Teleoperated Surgical Robot with Adaptive Interactive Control Architecture for Tissue Identification. Bioengineering. 2023; 10(10):1157. https://doi.org/10.3390/bioengineering10101157
Chicago/Turabian StyleSheng, Yubo, Haoyuan Cheng, Yiwei Wang, Huan Zhao, and Han Ding. 2023. "Teleoperated Surgical Robot with Adaptive Interactive Control Architecture for Tissue Identification" Bioengineering 10, no. 10: 1157. https://doi.org/10.3390/bioengineering10101157
APA StyleSheng, Y., Cheng, H., Wang, Y., Zhao, H., & Ding, H. (2023). Teleoperated Surgical Robot with Adaptive Interactive Control Architecture for Tissue Identification. Bioengineering, 10(10), 1157. https://doi.org/10.3390/bioengineering10101157