
A Compact Model for the Clustered Orienteering Problem



Abstract
1. Introduction
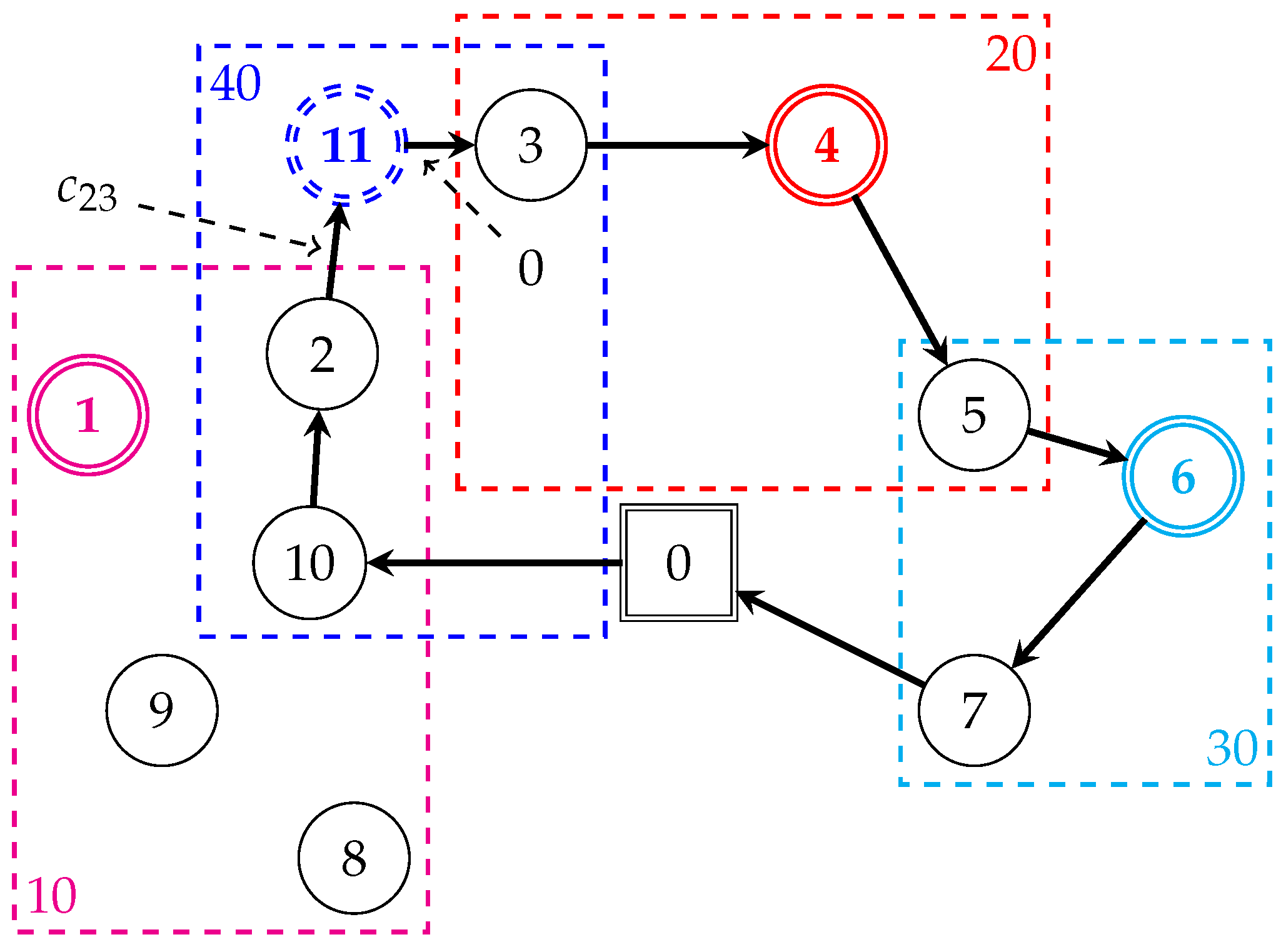
2. Problem Description
3. A Model Based on Constraint Programming
4. Computational Experiments
4.1. Benchmark Instances
- Clusters: the number of clusters (field s in the instance name) takes the value of 10, 15, 20, or 25;
- Profits: the profit of a given vertex is generated in two alternative ways ( or in the instance name) based either on the number of vertices in a cluster, or on a pseudo-random value, as explained in details in [13];
- Threshold: two different values are considered for ( or in the instance name), which are obtained by considering a fraction of the optimal value of the original TSPLIB95 problem from which the instance is derived, as described in [13].
4.2. Experimental Settings
- The branch-and-cut algorithm CUT-PLA presented in [18], with experiments run on a computer with an Intel Xeon(R) E2-2670 and 128 GB of RAM, using CPLEX 12.6 [25] as a MILP solver. A maximum computation time of 3600 is allowed for each run. Unfortunately, for this method, only aggregated results are available.
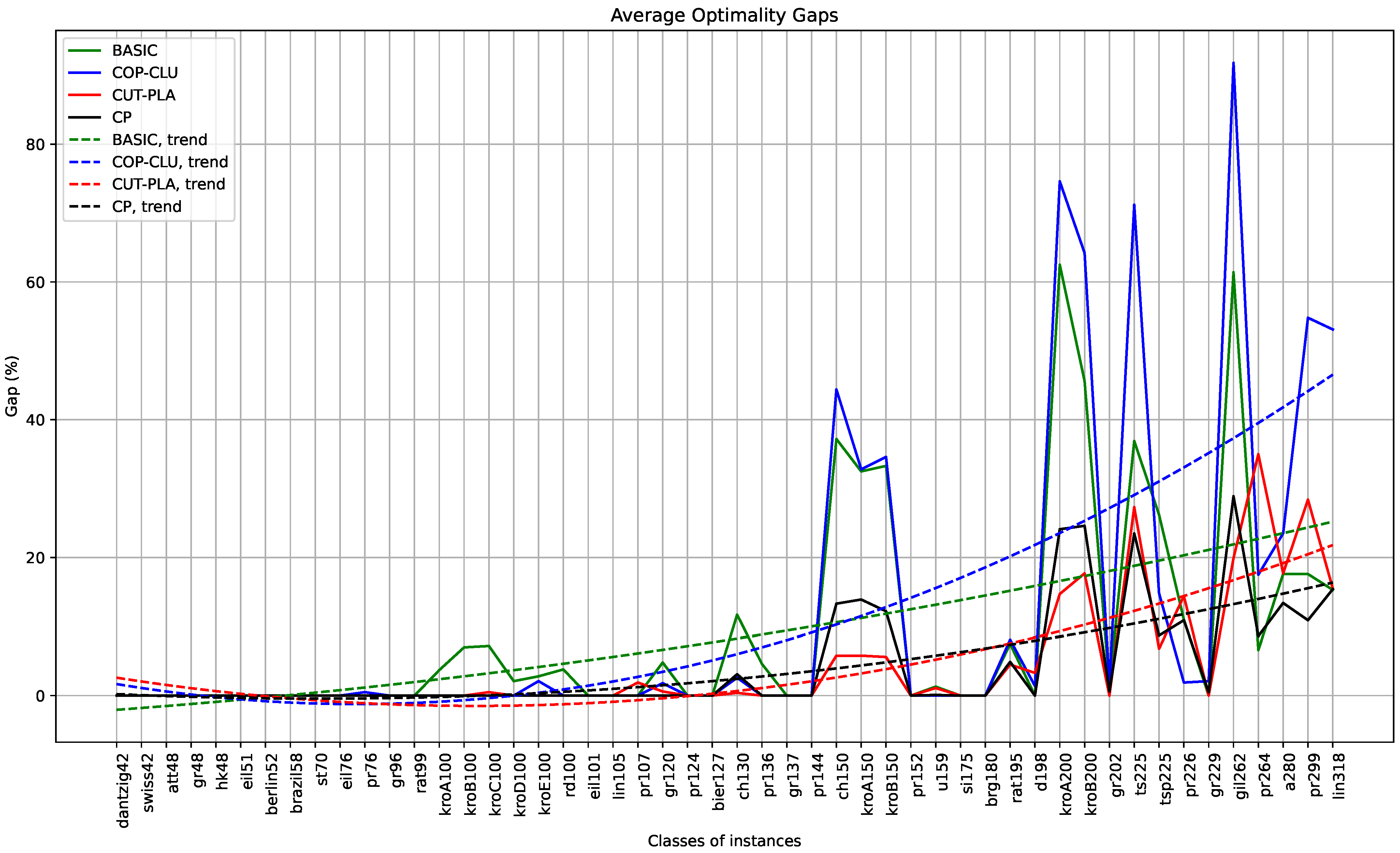
4.3. Comparison with Exact Methods
4.4. Improved Best-Known Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instance | s | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| LB | UB | LB | UB | LB | UB | LB | UB | ||
| dantzig42 | 10 | 31 | 31 | 43 | 43 | 1519 | 1519 | 2133 | 2133 |
| 15 | 36 | 36 | 51 | 51 | 1789 | 1789 | 2499 | 2499 | |
| 20 | 41 | 41 | 61 | 61 | 2074 | 2074 | 3004 | 3004 | |
| 25 | 48 | 48 | 71 | 71 | 2451 | 2451 | 3499 | 3499 | |
| swiss42 | 10 | 25 | 25 | 37 | 37 | 1231 | 1231 | 1885 | 1885 |
| 15 | 30 | 30 | 49 | 49 | 1486 | 1486 | 2443 | 2443 | |
| 20 | 37 | 37 | 57 | 57 | 1829 | 1829 | 2807 | 2807 | |
| 25 | 40 | 40 | 60 | 60 | 1973 | 1973 | 3042 | 3042 | |
| att48 | 10 | 14 | 14 | 35 | 35 | 733 | 733 | 1820 | 1820 |
| 15 | 20 | 20 | 46 | 46 | 1005 | 1005 | 2280 | 2280 | |
| 20 | 23 | 23 | 49 | 49 | 1145 | 1145 | 2581 | 2581 | |
| 25 | 24 | 24 | 56 | 56 | 1236 | 1236 | 2856 | 2856 | |
| gr48 | 10 | 18 | 18 | 42 | 42 | 832 | 832 | 2109 | 2109 |
| 15 | 21 | 21 | 52 | 52 | 1050 | 1050 | 2519 | 2519 | |
| 20 | 28 | 28 | 57 | 57 | 1339 | 1339 | 2792 | 2792 | |
| 25 | 33 | 33 | 66 | 66 | 1633 | 1633 | 3208 | 3208 | |
| hk48 | 10 | 14 | 14 | 35 | 35 | 733 | 733 | 1820 | 1820 |
| 15 | 25 | 25 | 45 | 45 | 1250 | 1250 | 2220 | 2220 | |
| 20 | 24 | 24 | 53 | 53 | 1188 | 1188 | 2590 | 2590 | |
| 25 | 32 | 32 | 63 | 63 | 1616 | 1616 | 3025 | 3025 | |
| eil51 | 10 | 21 | 21 | 42 | 42 | 1087 | 1087 | 2149 | 2149 |
| 15 | 26 | 26 | 50 | 50 | 1193 | 1193 | 2325 | 2325 | |
| 20 | 29 | 29 | 59 | 59 | 1320 | 1320 | 2793 | 2793 | |
| 25 | 32 | 32 | 64 | 64 | 1610 | 1610 | 3188 | 3188 | |
| berlin52 | 10 | 21 | 21 | 42 | 42 | 1158 | 1158 | 2251 | 2251 |
| 15 | 32 | 32 | 53 | 53 | 1694 | 1694 | 2707 | 2707 | |
| 20 | 36 | 36 | 62 | 62 | 1870 | 1870 | 3111 | 3111 | |
| 25 | 44 | 44 | 68 | 68 | 2322 | 2322 | 3486 | 3486 | |
| brazil58 | 10 | 22 | 22 | 39 | 39 | 1045 | 1045 | 1945 | 1945 |
| 15 | 34 | 34 | 57 | 57 | 1775 | 1775 | 2822 | 2822 | |
| 20 | 37 | 37 | 63 | 63 | 1865 | 1865 | 3235 | 3235 | |
| 25 | 44 | 44 | 73 | 73 | 2106 | 2106 | 3438 | 3438 | |
| st70 | 10 | 18 | 18 | 45 | 45 | 999 | 999 | 2321 | 2321 |
| 15 | 27 | 27 | 58 | 58 | 1202 | 1202 | 2811 | 2811 | |
| 20 | 29 | 29 | 68 | 68 | 1424 | 1424 | 3359 | 3359 | |
| 25 | 34 | 34 | 73 | 73 | 1665 | 1665 | 3660 | 3660 | |
| eil76 | 10 | 38 | 38 | 59 | 59 | 1726 | 1726 | 2902 | 2902 |
| 15 | 42 | 42 | 70 | 70 | 1994 | 1994 | 3440 | 3440 | |
| 20 | 47 | 47 | 81 | 81 | 2217 | 2217 | 3868 | 3868 | |
| 25 | 50 | 50 | 85 | 85 | 2440 | 2440 | 4275 | 4275 | |
| pr76 | 10 | 48 | 48 | 77 | 77 | 2362 | 2362 | 3755 | 3755 |
| 15 | 49 | 49 | 84 | 84 | 2523 | 2523 | 4178 | 4178 | |
| 20 | 54 | 54 | 94 | 94 | 2827 | 2827 | 4721 | 4721 | |
| 25 | 65 | 65 | 100 | 100 | 3295 | 3295 | 5130 | 5130 | |
| gr96 | 10 | 59 | 59 | 82 | 82 | 2895 | 2895 | 4062 | 4062 |
| 15 | 66 | 66 | 93 | 93 | 3305 | 3305 | 4719 | 4719 | |
| 20 | 70 | 70 | 105 | 105 | 3515 | 3515 | 5268 | 5268 | |
| 25 | 78 | 78 | 118 | 118 | 3987 | 3987 | 6067 | 6067 | |
| rat99 | 10 | 48 | 48 | 72 | 72 | 2376 | 2376 | 3664 | 3664 |
| 15 | 54 | 54 | 80 | 80 | 2693 | 2693 | 3996 | 3996 | |
| 20 | 56 | 56 | 91 | 91 | 2812 | 2812 | 4587 | 4587 | |
| 25 | 60 | 60 | 102 | 102 | 3094 | 3094 | 5055 | 5055 | |
| kroA100 | 10 | 12 | 12 | 60 | 60 | 654 | 654 | 3069 | 3069 |
| 15 | 27 | 27 | 70 | 70 | 1505 | 1505 | 3564 | 3564 | |
| 20 | 35 | 35 | 77 | 77 | 1890 | 1890 | 3999 | 3999 | |
| 25 | 30 | 30 | 84 | 84 | 1691 | 1691 | 4346 | 4346 | |
| kroB100 | 10 | 23 | 23 | 71 | 71 | 1154 | 1154 | 3469 | 3469 |
| 15 | 26 | 26 | 77 | 77 | 1439 | 1439 | 4040 | 4040 | |
| 20 | 34 | 34 | 83 | 83 | 1756 | 1756 | 4349 | 4349 | |
| 25 | 41 | 41 | 95 | 95 | 2159 | 2159 | 4917 | 4917 | |
| kroC100 | 10 | 12 | 12 | 60 | 60 | 634 | 634 | 2990 | 2990 |
| 15 | 26 | 26 | 71 | 71 | 1341 | 1341 | 3494 | 3494 | |
| 20 | 28 | 28 | 70 | 70 | 1366 | 1366 | 3640 | 3640 | |
| 25 | 30 | 30 | 83 | 83 | 1575 | 1575 | 4087 | 4087 | |
| kroD100 | 10 | 12 | 12 | 59 | 59 | 654 | 654 | 2936 | 2936 |
| 15 | 26 | 26 | 67 | 67 | 1405 | 1405 | 3467 | 3467 | |
| 20 | 28 | 28 | 77 | 77 | 1636 | 1636 | 4143 | 4143 | |
| 25 | 36 | 36 | 83 | 83 | 1889 | 1889 | 4319 | 4319 | |
| kroE100 | 10 | 24 | 24 | 71 | 71 | 1288 | 1288 | 3590 | 3590 |
| 15 | 26 | 26 | 76 | 76 | 1456 | 1456 | 3930 | 3930 | |
| 20 | 28 | 28 | 84 | 84 | 1646 | 1646 | 4387 | 4387 | |
| 25 | 36 | 36 | 90 | 90 | 1950 | 1950 | 4737 | 4737 | |
| rd100 | 10 | 24 | 24 | 60 | 60 | 1288 | 1288 | 3090 | 3090 |
| 15 | 34 | 34 | 71 | 71 | 1879 | 1879 | 3641 | 3641 | |
| 20 | 35 | 35 | 84 | 84 | 1995 | 1995 | 4303 | 4303 | |
| 25 | 42 | 42 | 90 | 90 | 2169 | 2169 | 4573 | 4573 | |
| eil101 | 10 | 48 | 48 | 84 | 84 | 2456 | 2456 | 4298 | 4298 |
| 15 | 51 | 51 | 86 | 86 | 2613 | 2613 | 4516 | 4516 | |
| 20 | 56 | 56 | 98 | 98 | 3002 | 3002 | 5161 | 5161 | |
| 25 | 66 | 66 | 108 | 108 | 3393 | 3393 | 5458 | 5458 | |
| lin105 | 10 | 51 | 51 | 88 | 88 | 2500 | 2500 | 4368 | 4368 |
| 15 | 54 | 54 | 99 | 99 | 2789 | 2789 | 4940 | 4940 | |
| 20 | 60 | 60 | 109 | 109 | 2920 | 2920 | 5234 | 5234 | |
| 25 | 69 | 69 | 112 | 112 | 3531 | 3531 | 5748 | 5748 | |
| pr107 | 10 | 39 | 39 | 65 | 65 | 1958 | 1958 | 3210 | 3210 |
| 15 | 54 | 54 | 73 | 73 | 2709 | 2709 | 3766 | 3766 | |
| 20 | 61 | 61 | 80 | 80 | 2958 | 2958 | 4016 | 4016 | |
| 25 | 65 | 65 | 89 | 89 | 3255 | 3255 | 4535 | 4535 | |
| gr120 | 10 | 42 | 42 | 84 | 84 | 2181 | 2181 | 4350 | 4350 |
| 15 | 49 | 49 | 99 | 99 | 2491 | 2491 | 4955 | 4955 | |
| 20 | 56 | 56 | 104 | 104 | 2800 | 2800 | 5339 | 5339 | |
| 25 | 56 | 56 | 116 | 116 | 3102 | 3102 | 5941 | 5941 | |
| pr124 | 10 | 44 | 44 | 87 | 87 | 2280 | 2280 | 4455 | 4455 |
| 15 | 62 | 62 | 103 | 103 | 3102 | 3102 | 5139 | 5139 | |
| 20 | 66 | 66 | 115 | 115 | 3221 | 3221 | 5631 | 5631 | |
| 25 | 77 | 77 | 124 | 124 | 3779 | 3779 | 6246 | 6246 | |
| bier127 | 10 | 75 | 75 | 118 | 118 | 3700 | 3700 | 5882 | 5882 |
| 15 | 86 | 86 | 136 | 136 | 4315 | 4315 | 6874 | 6874 | |
| 20 | 94 | 94 | 142 | 142 | 4751 | 4751 | 7125 | 7125 | |
| 25 | 99 | 99 | 148 | 148 | 5069 | 5069 | 7530 | 7530 | |
| ch130 | 10 | 30 | 30 | 89 | 89 | 1546 | 1546 | 4421 | 4421 |
| 15 | 44 | 44 | 97 | 97 | 2266 | 2266 | 4483 | 4844 | |
| 20 | 53 | 53 | 104 | 104 | 2665 | 2665 | 5246 | 5585 | |
| 25 | 52 | 59 | 115 | 115 | 2605 | 3414 | 5785 | 5785 | |
| pr136 | 10 | 48 | 48 | 95 | 95 | 2500 | 2500 | 4781 | 4781 |
| 15 | 66 | 66 | 110 | 110 | 3415 | 3415 | 5635 | 5635 | |
| 20 | 72 | 72 | 117 | 117 | 3624 | 3624 | 5899 | 5899 | |
| 25 | 79 | 79 | 128 | 128 | 4019 | 4019 | 6592 | 6592 | |
| gr137 | 10 | 64 | 64 | 111 | 111 | 3256 | 3256 | 5635 | 5635 |
| 15 | 77 | 77 | 122 | 122 | 3892 | 3892 | 6115 | 6115 | |
| 20 | 81 | 81 | 132 | 132 | 4113 | 4113 | 6618 | 6618 | |
| 25 | 87 | 87 | 137 | 137 | 4470 | 4470 | 7060 | 7060 | |
| pr144 | 10 | 66 | 66 | 98 | 98 | 3265 | 3265 | 5001 | 5001 |
| 15 | 72 | 72 | 117 | 117 | 3584 | 3584 | 5942 | 5942 | |
| 20 | 74 | 74 | 128 | 128 | 3743 | 3743 | 6464 | 6464 | |
| 25 | 80 | 80 | 136 | 136 | 4040 | 4040 | 6784 | 6784 | |
| ch150 | 10 | 34 | 34 | 85 | 85 | 1773 | 1773 | 4380 | 4380 |
| 15 | 36 | 60 | 96 | 107 | 1882 | 1882 | 4961 | 5515 | |
| 20 | 56 | 65 | 107 | 117 | 2781 | 3541 | 5340 | 6308 | |
| 25 | 48 | 72 | 119 | 128 | 2185 | 3801 | 6022 | 6707 | |
| kroA150 | 10 | 34 | 34 | 85 | 85 | 1708 | 1708 | 4379 | 4379 |
| 15 | 36 | 36 | 108 | 108 | 1882 | 2925 | 5475 | 5475 | |
| 20 | 40 | 59 | 107 | 120 | 2072 | 3354 | 5512 | 6196 | |
| 25 | 40 | 64 | 120 | 127 | 2300 | 3890 | 6000 | 6669 | |
| kroB150 | 10 | 34 | 34 | 85 | 85 | 1753 | 1753 | 4390 | 4390 |
| 15 | 36 | 48 | 107 | 107 | 1882 | 2496 | 5421 | 5421 | |
| 20 | 45 | 59 | 112 | 117 | 2212 | 3336 | 5733 | 6194 | |
| 25 | 48 | 64 | 119 | 128 | 2488 | 3724 | 5821 | 6545 | |
| pr152 | 10 | 68 | 68 | 102 | 102 | 3414 | 3414 | 5141 | 5141 |
| 15 | 72 | 72 | 120 | 120 | 3656 | 3656 | 6060 | 6060 | |
| 20 | 80 | 80 | 127 | 127 | 4100 | 4100 | 6541 | 6541 | |
| 25 | 88 | 88 | 136 | 136 | 4436 | 4436 | 6960 | 6960 | |
| u159 | 10 | 72 | 72 | 125 | 125 | 3696 | 3696 | 6227 | 6227 |
| 15 | 85 | 85 | 138 | 138 | 4072 | 4072 | 6845 | 6845 | |
| 20 | 88 | 90 | 148 | 148 | 4374 | 4374 | 7364 | 7364 | |
| 25 | 99 | 99 | 157 | 157 | 4955 | 4955 | 7716 | 7716 | |
| si175 | 10 | 80 | 80 | 137 | 137 | 4075 | 4075 | 6861 | 6861 |
| 15 | 98 | 98 | 149 | 149 | 5033 | 5033 | 7456 | 7456 | |
| 20 | 99 | 99 | 153 | 153 | 5171 | 5171 | 7831 | 7831 | |
| 25 | 108 | 108 | 162 | 162 | 5478 | 5478 | 8249 | 8249 | |
| brg180 | 10 | 80 | 80 | 140 | 140 | 4100 | 4100 | 6990 | 6990 |
| 15 | 97 | 97 | 140 | 140 | 4830 | 4830 | 7186 | 7186 | |
| 20 | 99 | 99 | 154 | 154 | 5107 | 5107 | 7779 | 7779 | |
| 25 | 103 | 103 | 166 | 166 | 5249 | 5249 | 8312 | 8312 | |
| rat195 | 10 | 87 | 87 | 129 | 150 | 4481 | 4481 | 6555 | 7699 |
| 15 | 105 | 105 | 150 | 164 | 5265 | 5265 | 7475 | 8126 | |
| 20 | 108 | 108 | 156 | 167 | 5486 | 5486 | 7915 | 8734 | |
| 25 | 110 | 110 | 158 | 179 | 5695 | 5695 | 8685 | 9095 | |
| d198 | 10 | 110 | 110 | 153 | 153 | 5595 | 5595 | 7738 | 7738 |
| 15 | 121 | 121 | 166 | 166 | 6228 | 6228 | 8513 | 8513 | |
| 20 | 120 | 120 | 192 | 192 | 6100 | 6100 | 9624 | 9624 | |
| 25 | 130 | 130 | 200 | 200 | 6625 | 6625 | 10,100 | 10,100 | |
| kroA200 | 10 | 44 | 44 | 110 | 110 | 2258 | 2258 | 5540 | 6660 |
| 15 | 48 | 78 | 108 | 139 | 2415 | 4598 | 5957 | 7613 | |
| 20 | 48 | 84 | 132 | 144 | 2496 | 5047 | 6654 | 8302 | |
| 25 | 60 | 80 | 140 | 159 | 2970 | 5612 | 6006 | 8901 | |
| kroB200 | 10 | 44 | 44 | 110 | 110 | 2298 | 2298 | 5541 | 6680 |
| 15 | 47 | 78 | 122 | 139 | 2438 | 4697 | 5458 | 7565 | |
| 20 | 48 | 84 | 132 | 144 | 2516 | 5178 | 6119 | 8239 | |
| 25 | 60 | 90 | 140 | 160 | 2685 | 5499 | 6631 | 8671 | |
| gr202 | 10 | 121 | 121 | 193 | 193 | 6280 | 6280 | 9869 | 9869 |
| 15 | 124 | 124 | 200 | 200 | 6306 | 6946 | 10,080 | 10,080 | |
| 20 | 144 | 144 | 205 | 205 | 7332 | 7332 | 10,342 | 10,342 | |
| 25 | 150 | 150 | 221 | 221 | 7525 | 7525 | 11,104 | 11,104 | |
| ts225 | 10 | 79 | 107 | 159 | 186 | 3983 | 6127 | 7987 | 9386 |
| 15 | 68 | 102 | 135 | 187 | 4355 | 6607 | 6912 | 10,107 | |
| 20 | 92 | 121 | 173 | 199 | 5491 | 7009 | 9063 | 10,843 | |
| 25 | 99 | 132 | 164 | 209 | 5497 | 7147 | 9407 | 11,014 | |
| tsp225 | 10 | 81 | 108 | 158 | 183 | 5267 | 5362 | 7867 | 9283 |
| 15 | 85 | 102 | 170 | 170 | 5089 | 6118 | 8551 | 9379 | |
| 20 | 107 | 108 | 186 | 186 | 5562 | 6537 | 9431 | 9956 | |
| 25 | 121 | 121 | 197 | 197 | 5505 | 6545 | 9887 | 10,242 | |
| pr226 | 10 | 81 | 107 | 186 | 186 | 4137 | 6762 | 9633 | 9633 |
| 15 | 102 | 102 | 204 | 204 | 4390 | 7641 | 10,388 | 10,388 | |
| 20 | 117 | 117 | 212 | 212 | 5642 | 8142 | 11,197 | 11,197 | |
| 25 | 110 | 110 | 220 | 220 | 5100 | 8210 | 11,195 | 11,195 | |
| gr229 | 10 | 162 | 162 | 215 | 215 | 8139 | 8139 | 10,809 | 10,809 |
| 15 | 155 | 155 | 206 | 206 | 7858 | 7858 | 10,439 | 10,439 | |
| 20 | 187 | 187 | 228 | 228 | 9179 | 9179 | 10,768 | 11,348 | |
| 25 | 188 | 188 | 233 | 233 | 9466 | 9466 | 11,718 | 12,041 | |
| gil262 | 10 | 61 | 61 | 151 | 181 | 3125 | 4640 | 7690 | 9245 |
| 15 | 78 | 99 | 136 | 195 | 3101 | 6710 | 7951 | 10,012 | |
| 20 | 75 | 121 | 181 | 196 | 3669 | 7060 | 8350 | 10,780 | |
| 25 | 83 | 133 | 174 | 215 | 3227 | 7394 | 6709 | 11,283 | |
| pr264 | 10 | 92 | 92 | 182 | 182 | 4682 | 5416 | 7802 | 10,423 |
| 15 | 120 | 120 | 178 | 197 | 6080 | 6080 | 8971 | 9967 | |
| 20 | 122 | 122 | 197 | 197 | 6155 | 6155 | 8594 | 12,019 | |
| 25 | 130 | 186 | 215 | 229 | 6565 | 6565 | 10,331 | 12,024 | |
| a280 | 10 | 128 | 128 | 191 | 224 | 6296 | 7610 | 9554 | 11,304 |
| 15 | 105 | 147 | 186 | 226 | 6137 | 7667 | 10,405 | 11,400 | |
| 20 | 128 | 144 | 223 | 224 | 6318 | 7797 | 11,165 | 11,809 | |
| 25 | 131 | 157 | 210 | 238 | 6808 | 8306 | 11,411 | 12,533 | |
| pr299 | 10 | 136 | 136 | 204 | 238 | 5269 | 7263 | 10,274 | 12,057 |
| 15 | 132 | 153 | 219 | 242 | 6752 | 8308 | 11,099 | 12,649 | |
| 20 | 136 | 153 | 238 | 238 | 7704 | 8598 | 12,024 | 12,923 | |
| 25 | 154 | 167 | 236 | 252 | 7795 | 8878 | 12,102 | 13,337 | |
| lin318 | 10 | 76 | 152 | 226 | 265 | 5854 | 9471 | 9682 | 13,502 |
| 15 | 151 | 152 | 227 | 252 | 7660 | 9162 | 11,466 | 14,012 | |
| 20 | 162 | 162 | 251 | 270 | 8215 | 9294 | 12,780 | 13,941 | |
| 25 | 161 | 180 | 264 | 279 | 7341 | 9337 | 13,190 | 13,894 | |
References
- Tsiligirides, T. Heuristic methods applied to orienteering. J. Oper. Res. Soc. 1984, 35, 797–809. [Google Scholar] [CrossRef]
- Golden, B.L.; Levy, L.; Vohra, R. The orienteering problem. Nav. Res. Logist. 1987, 3, 307–318. [Google Scholar] [CrossRef]
- Vansteenwegen, P.; Souffriau, W.; van Oudheusden, D. The orienteering problem: A survey. Eur. J. Oper. Res. 2011, 209, 1–10. [Google Scholar] [CrossRef]
- Gunawan, A.; Lau, H.C.; Vansteenwegen, P. Orienteering problem: A survey of recent variants, solution approaches and applications. Eur. J. Oper. Res. 2016, 2, 315–332. [Google Scholar] [CrossRef]
- Fischetti, M.; Salazar-Gonzalez, J.; Toth, P. The generalized traveling salesman and orienteering problems. In The Traveling Salesman Problem and Its Variations; Springer: Berlin/Heidelberg, Germany, 2007; pp. 609–662. [Google Scholar]
- Archetti, C.; Speranza, M.G.; Vigo, D. Vehicle routing problems with profits. In Vehicle Routing: Problems, Methods, and Applications; Toth, P., Vigo, D., Eds.; MOS-SIAM Series on Optimization; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2014; pp. 273–298. [Google Scholar]
- Statista. E-Commerce. 2024. Available online: https://www.statista.com/markets/413/e-commerce/ (accessed on 25 April 2024).
- Alidaee, B.; Wang, H.; Sua, L. The last-mile delivery of heavy, bulky, oversized products: Literature review and research agenda. Logistics 2023, 7, 98. [Google Scholar] [CrossRef]
- Rüther, C.; Rieck, J. A bayesian optimization approach for tuning a grouping genetic algorithm for folving practically oriented pickup and delivery problems. Logistics 2024, 8, 14. [Google Scholar] [CrossRef]
- Dell’Amico, M.; Montemanni, R.; Novellani, S. Pickup and delivery with lockers. Transp. Res. Part C Emerg. Technol. 2023, 148, 104022. [Google Scholar] [CrossRef]
- Li, F.; Kunze, O. A comparative review of air drones (UAVs) and delivery bots (SUGVs) for automated last mile home delivery. Logistics 2023, 7, 21. [Google Scholar] [CrossRef]
- Saker, A.; Eltawil, A.; Ali, I. Adaptive large neighborhood search metaheuristic for the capacitated vehicle routing problem with parcel lockers. Logistics 2023, 7, 72. [Google Scholar] [CrossRef]
- Angelelli, E.; Archetti, C.; Vindigni, M. The clustered orienteering problem. Eur. J. Oper. Res. 2014, 238, 404–414. [Google Scholar] [CrossRef]
- Archetti, C.; Carrabs, F.; Cerulli, R. The set orienteering problem. Eur. J. Oper. Res. 2018, 1, 264–272. [Google Scholar] [CrossRef]
- Archetti, C.; Carrabs, F.; Cerulli, R.; Laureana, F. A new formulation and a branch-and-cut algorithm for the set orienteering problem. Eur. J. Oper. Res. 2024, 314, 446–465. [Google Scholar] [CrossRef]
- Yahiaoui, A.E.; Moukrim, A.; Serairi, M. Hybrid Heuristic for the Clustered Orienteering Problem. In Computational Logistics: 8th International Conference, ICCL 2017, Southampton, UK, 18–20 October 2017; Springer International Publishing: Berlin, Germany, 2017; Volume 10572. [Google Scholar]
- Wu, Q.; He, M.; Has, J.K.; Lu, Y. An effective hybrid evolutionary algorithm for the clustered orienteering problem. Eur. J. Oper. Res. 2024, 313, 418–434. [Google Scholar] [CrossRef]
- Yahiaoui, A.E.; Moukrim, A.; Serairi, M. The clustered team orienteering problem. Comput. Oper. Res. 2019, 111, 386–399. [Google Scholar] [CrossRef]
- Montemanni, R.; Dell’Amico, M. Solving the parallel drone scheduling traveling salesman problem via constraint programming. Algorithms 2023, 16, 40. [Google Scholar] [CrossRef]
- Montemanni, R.; Smith, D.H. On solving the set orienteering problem. Symmetry 2024, 26, 340. [Google Scholar] [CrossRef]
- Google. OR-Tools. Available online: https://developers.google.com/optimization/ (accessed on 14 March 2024).
- Perron, L.; Didier, F. CP-SAT. Available online: https://developers.google.com/optimization/cp/cp_solver/ (accessed on 14 March 2024).
- The Clustered Orienteering Problem. Available online: http://or-brescia.unibs.it/ (accessed on 14 March 2024).
- TSPLIB95. Available online: http://comopt.ifi.uni-heidelberg.de/software/TSPLIB95 (accessed on 14 March 2024).
- IBM. IBM CPLEX Optimizer. 2024. Available online: https://www.ibm.com/de-de/analytics/cplex-optimizer (accessed on 14 March 2024).
- Pardalos, P. The maximum clique problem. J. Glob. Optim. 1994, 4, 301–328. [Google Scholar] [CrossRef]


| Paper | Exact Methods | Heuristic Methods | Multiple Trucks |
|---|---|---|---|
| Angelelli et al. [13] | Yes | Yes | No |
| Yahiaoui et al. [16] | No | Yes | No |
| Yahiaoui et al. [18] | Yes | Yes | Yes |
| Wu et al. [17] | No | Yes | No |
| This paper | Yes | No | No |
| Classes of Instances | BASIC | COP-CLU | CUT-PLA | CP | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (Angelelli et al. [13]) | (Angelelli et al. [13]) | (Yahiaoui et al. [18]) | ||||||||||
| # Opt | Gap % | Sec | # Opt | Gap % | Sec | # Opt | Gap % | Sec | # Opt | Gap % | Sec | |
| dantzig42 | 16 | 0.0 | 8.1 | 16 | 0.0 | 0.6 | 16 | 0.0 | 2.9 | 16 | 0.0 | 4.6 |
| swiss42 | 16 | 0.0 | 6.6 | 16 | 0.0 | 1.0 | 16 | 0.0 | 4.1 | 16 | 0.0 | 5.1 |
| att48 | 16 | 0.0 | 13.2 | 16 | 0.0 | 8.5 | 16 | 0.0 | 34.8 | 16 | 0.0 | 25.9 |
| gr48 | 16 | 0.0 | 11.9 | 16 | 0.0 | 4.9 | 16 | 0.0 | 12.5 | 16 | 0.0 | 18.5 |
| hk48 | 16 | 0.0 | 10.9 | 16 | 0.0 | 5.5 | 16 | 0.0 | 12.4 | 16 | 0.0 | 19.3 |
| eil51 | 16 | 0.0 | 16.7 | 16 | 0.0 | 6.8 | 16 | 0.0 | 16.6 | 16 | 0.0 | 30.2 |
| berlin52 | 16 | 0.0 | 12.0 | 16 | 0.0 | 2.3 | 16 | 0.0 | 10.0 | 16 | 0.0 | 13.9 |
| brazil58 | 16 | 0.0 | 16.4 | 16 | 0.0 | 5.5 | 16 | 0.0 | 26.7 | 16 | 0.0 | 24.0 |
| st70 | 16 | 0.0 | 52.7 | 16 | 0.0 | 57.7 | 16 | 0.0 | 95.7 | 16 | 0.0 | 400.2 |
| eil76 | 16 | 0.0 | 20.2 | 16 | 0.0 | 18.2 | 16 | 0.0 | 25.8 | 16 | 0.0 | 62.6 |
| pr76 | 16 | 0.0 | 94.4 | 15 | 0.5 | 501.7 | 16 | 0.0 | 196.4 | 16 | 0.0 | 276.9 |
| gr96 | 16 | 0.0 | 34.8 | 16 | 0.0 | 23.3 | 16 | 0.0 | 37.2 | 16 | 0.0 | 78.7 |
| rat99 | 16 | 0.0 | 232.4 | 16 | 0.0 | 93.1 | 16 | 0.0 | 159.3 | 16 | 0.0 | 458.6 |
| kroA100 | 14 | 3.7 | 1112.5 | 16 | 0.0 | 279.0 | 16 | 0.0 | 241.0 | 16 | 0.0 | 520.4 |
| kroB100 | 11 | 7.0 | 1386.0 | 16 | 0.0 | 468.6 | 16 | 0.0 | 272.5 | 16 | 0.0 | 762.3 |
| kroC100 | 11 | 7.2 | 1968.0 | 16 | 0.0 | 602.8 | 15 | 0.5 | 746.3 | 16 | 0.0 | 696.5 |
| kroD100 | 14 | 2.1 | 1613.8 | 16 | 0.0 | 647.2 | 16 | 0.0 | 581.6 | 16 | 0.0 | 1022.8 |
| kroE100 | 13 | 2.8 | 1107.8 | 15 | 2.1 | 562.5 | 16 | 0.0 | 179.1 | 16 | 0.0 | 717.3 |
| rd100 | 10 | 3.8 | 1702.8 | 16 | 0.0 | 537.0 | 16 | 0.0 | 225.1 | 16 | 0.0 | 1387.9 |
| eil101 | 16 | 0.0 | 94.0 | 16 | 0.0 | 50.9 | 16 | 0.0 | 116.0 | 16 | 0.0 | 236.5 |
| lin105 | 16 | 0.0 | 104.4 | 16 | 0.0 | 59.4 | 16 | 0.0 | 72.7 | 16 | 0.0 | 184.1 |
| pr107 | 16 | 0.0 | 171.3 | 16 | 0.0 | 61.6 | 15 | 1.9 | 332.5 | 16 | 0.0 | 112.2 |
| gr120 | 10 | 4.8 | 1854.9 | 15 | 1.8 | 948.2 | 15 | 0.6 | 688.8 | 16 | 0.0 | 1013.0 |
| pr124 | 16 | 0.0 | 139.7 | 16 | 0.0 | 78.5 | 16 | 0.0 | 100.5 | 16 | 0.0 | 293.6 |
| bier127 | 16 | 0.0 | 283.8 | 16 | 0.0 | 97.4 | 16 | 0.0 | 92.2 | 16 | 0.0 | 211.0 |
| ch130 | 5 | 11.7 | 2717.6 | 12 | 2.6 | 1844.0 | 15 | 0.4 | 767.3 | 12 | 3.1 | 2480.0 |
| pr136 | 11 | 4.6 | 2024.1 | 16 | 0.0 | 765.1 | 16 | 0.0 | 326.3 | 16 | 0.0 | 1106.1 |
| gr137 | 16 | 0.0 | 144.9 | 16 | 0.0 | 62.9 | 16 | 0.0 | 149.9 | 16 | 0.0 | 204.6 |
| pr144 | 16 | 0.0 | 229.0 | 16 | 0.0 | 119.4 | 16 | 0.0 | 135.7 | 16 | 0.0 | 407.1 |
| ch150 | 1 | 37.2 | 3438.7 | 0 | 44.4 | 3600.7 | 9 | 5.8 | 2098.0 | 5 | 13.3 | 2859.9 |
| kroA150 | 2 | 32.5 | 3488.5 | 3 | 32.8 | 3232.8 | 10 | 5.8 | 1713.4 | 7 | 13.9 | 2641.9 |
| kroB150 | 1 | 33.3 | 3591.2 | 1 | 34.6 | 3571.2 | 11 | 5.6 | 1913.8 | 6 | 12.2 | 2782.9 |
| pr152 | 16 | 0.0 | 266.4 | 16 | 0.0 | 130.0 | 16 | 0.0 | 559.2 | 16 | 0.0 | 545.8 |
| u159 | 13 | 1.3 | 923.5 | 16 | 0.0 | 442.1 | 14 | 1.1 | 1185.8 | 15 | 0.1 | 1844.1 |
| si175 | 16 | 0.0 | 844.0 | 16 | 0.0 | 424.5 | 16 | 0.0 | 315.5 | 16 | 0.0 | 950.3 |
| brg180 | 16 | 0.0 | 597.5 | 16 | 0.0 | 141.5 | 16 | 0.0 | 155.6 | 16 | 0.0 | 422.0 |
| rat195 | 5 | 7.5 | 3020.1 | 7 | 8.1 | 3004.0 | 10 | 4.5 | 1757.7 | 8 | 4.9 | 2821.1 |
| d198 | 16 | 0.0 | 179.5 | 14 | 1.4 | 1035.5 | 12 | 3.3 | 1431.6 | 16 | 0.0 | 1334.7 |
| kroA200 | 0 | 62.5 | 3600.8 | 0 | 74.6 | 3601.0 | 6 | 14.7 | 2562.2 | 3 | 24.1 | 3281.1 |
| kroB200 | 2 | 45.6 | 3471.5 | 0 | 64.2 | 3600.4 | 6 | 17.7 | 2550.0 | 3 | 24.6 | 3142.6 |
| gr202 | 13 | 1.3 | 814.4 | 13 | 1.4 | 1255.6 | 16 | 0.0 | 557.1 | 15 | 0.6 | 1799.6 |
| ts225 | 0 | 36.9 | 3600.5 | 0 | 71.2 | 3600.4 | 0 | 27.3 | 3600.7 | 0 | 23.5 | 3600.0 |
| tsp225 | 1 | 26.2 | 3504.6 | 3 | 14.8 | 3335.7 | 10 | 6.8 | 2461.4 | 4 | 8.7 | 3428.1 |
| pr226 | 10 | 11.0 | 1782.0 | 14 | 1.9 | 1485.8 | 5 | 14.4 | 3066.9 | 11 | 10.9 | 2342.3 |
| gr229 | 16 | 0.0 | 299.6 | 13 | 2.1 | 1645.3 | 16 | 0.0 | 1063.6 | 14 | 0.5 | 2023.9 |
| gil262 | 0 | 61.4 | 3601.5 | 0 | 91.8 | 3601.6 | 4 | 19.9 | 3084.4 | 1 | 28.9 | 3436.3 |
| pr264 | 8 | 6.6 | 2499.8 | 10 | 17.5 | 2105.1 | 2 | 35.0 | 3155.6 | 8 | 8.6 | 3191.0 |
| a280 | 1 | 17.6 | 3415.7 | 1 | 23.5 | 3464.0 | 2 | 17.7 | 3357.5 | 1 | 13.4 | 3424.3 |
| pr299 | 1 | 17.6 | 3569.6 | 2 | 54.8 | 3554.8 | 1 | 28.4 | 3449.9 | 2 | 10.9 | 3421.6 |
| lin318 | 1 | 15.3 | 3543.9 | 0 | 53.1 | 3600.6 | 1 | 15.5 | 3430.7 | 1 | 15.4 | 3563.4 |
| Average | 11.2 | 9.2 | 1344.8 | 12.0 | 12.0 | 1166.9 | 12.9 | 4.5 | 982.6 | 12.6 | 4.3 | 1312.6 |
| Instance | s | g | q | Best Known | CP | Instance | s | g | q | Best Known | CP | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| LB | UB | UB | Opt | LB | UB | UB | Opt | ||||||||
| gr120 | 15 | 1 | 2 | 49 | 56.1 | 49 | ★ | kroB200 | 15 | 1 | 3 | 123 | 156.2 | 139 | |
| ch130 | 25 | 1 | 2 | 52 | 59.7 | 59 | kroB200 | 15 | 2 | 3 | 6204 | 7828.3 | 7565 | ||
| ch150 | 10 | 1 | 3 | 85 | 105.3 | 85 | ★ | kroB200 | 20 | 1 | 2 | 48 | 106.2 | 84 | |
| ch150 | 10 | 2 | 2 | 1773 | 2580.9 | 1773 | ★ | kroB200 | 20 | 1 | 3 | 132 | 166.9 | 144 | |
| ch150 | 10 | 2 | 3 | 4380 | 5119.7 | 4380 | ★ | kroB200 | 20 | 2 | 3 | 6814 | 8354.2 | 8239 | |
| ch150 | 15 | 2 | 2 | 1882 | 3639.6 | 1882 | ★ | kroB200 | 25 | 1 | 2 | 60 | 120.0 | 90 | |
| ch150 | 15 | 2 | 3 | 4961 | 5736.1 | 5515 | kroB200 | 25 | 1 | 3 | 140 | 176.8 | 160 | ||
| ch150 | 20 | 1 | 2 | 56 | 79.3 | 65 | kroB200 | 25 | 2 | 3 | 7390 | 8931.2 | 8671 | ||
| ch150 | 20 | 1 | 3 | 114 | 127.0 | 117 | gr202 | 15 | 1 | 2 | 124 | 133.2 | 124 | ★ | |
| ch150 | 20 | 2 | 2 | 2781 | 3913.2 | 3541 | ts225 | 10 | 1 | 2 | 81 | 131.4 | 107 | ||
| ch150 | 20 | 2 | 3 | 5665 | 6524.3 | 6308 | ts225 | 10 | 1 | 3 | 160 | 197.3 | 186 | ||
| ch150 | 25 | 1 | 2 | 48 | 94.1 | 72 | ts225 | 10 | 2 | 2 | 4058 | 6613.6 | 6127 | ||
| ch150 | 25 | 1 | 3 | 120 | 130.7 | 128 | ts225 | 10 | 2 | 3 | 8036 | 9680.9 | 9386 | ||
| ch150 | 25 | 2 | 2 | 2597 | 4593.7 | 3801 | ts225 | 15 | 1 | 2 | 102 | 129.2 | 102 | ★ | |
| kroA150 | 10 | 1 | 3 | 85 | 102.2 | 85 | ★ | ts225 | 15 | 1 | 3 | 170 | 198.6 | 187 | |
| kroA150 | 10 | 2 | 3 | 4379 | 4990.1 | 4379 | ★ | ts225 | 20 | 1 | 2 | 107 | 136.8 | 121 | |
| kroA150 | 15 | 1 | 2 | 36 | 60.0 | 36 | ★ | ts225 | 20 | 1 | 3 | 186 | 206.3 | 199 | |
| kroA150 | 15 | 2 | 2 | 1882 | 3302.7 | 2925 | ts225 | 25 | 1 | 2 | 121 | 144.0 | 132 | ||
| kroA150 | 20 | 1 | 2 | 40 | 74.1 | 59 | ts225 | 25 | 1 | 3 | 187 | 215.0 | 209 | ||
| kroA150 | 20 | 1 | 3 | 108 | 127.9 | 120 | ts225 | 25 | 2 | 2 | 6072 | 7269.2 | 7147 | ||
| kroA150 | 20 | 2 | 2 | 2109 | 3634.2 | 3354 | tsp225 | 10 | 1 | 2 | 107 | 110.9 | 108 | ||
| kroA150 | 20 | 2 | 3 | 5532 | 6338.2 | 6196 | tsp225 | 10 | 2 | 2 | 5274 | 5591.4 | 5362 | ||
| kroA150 | 25 | 1 | 2 | 48 | 78.1 | 64 | tsp225 | 15 | 1 | 2 | 102 | 112.9 | 102 | ★ | |
| kroA150 | 25 | 1 | 3 | 120 | 128.3 | 127 | tsp225 | 15 | 1 | 3 | 170 | 180.9 | 170 | ★ | |
| kroA150 | 25 | 2 | 2 | 2424 | 4003.0 | 3890 | tsp225 | 20 | 1 | 2 | 107 | 117.3 | 108 | ||
| kroB150 | 10 | 1 | 2 | 34 | 38.9 | 34 | ★ | tsp225 | 20 | 1 | 3 | 186 | 187.2 | 186 | ★ |
| kroB150 | 10 | 1 | 3 | 85 | 105.9 | 85 | ★ | gil262 | 10 | 1 | 2 | 61 | 110.4 | 61 | ★ |
| kroB150 | 10 | 2 | 3 | 4390 | 5431.1 | 4390 | ★ | gil262 | 10 | 1 | 3 | 151 | 203.9 | 181 | |
| kroB150 | 15 | 1 | 2 | 36 | 64.7 | 48 | gil262 | 10 | 2 | 2 | 3125 | 5337.1 | 4640 | ||
| kroB150 | 15 | 1 | 3 | 107 | 116.0 | 107 | ★ | gil262 | 10 | 2 | 3 | 7750 | 10,191.2 | 9245 | |
| kroB150 | 15 | 2 | 2 | 1882 | 3654.9 | 2496 | gil262 | 15 | 1 | 2 | 78 | 123.6 | 99 | ||
| kroB150 | 15 | 2 | 3 | 5421 | 5762.8 | 5421 | ★ | gil262 | 15 | 1 | 3 | 175 | 205.9 | 195 | |
| kroB150 | 20 | 1 | 2 | 45 | 68.7 | 59 | gil262 | 15 | 2 | 3 | 8961 | 10,313.3 | 10,012 | ||
| kroB150 | 20 | 1 | 3 | 112 | 122.7 | 117 | gil262 | 20 | 1 | 2 | 76 | 139.7 | 121 | ||
| kroB150 | 20 | 2 | 2 | 2212 | 3782.5 | 3336 | gil262 | 20 | 1 | 3 | 181 | 214.1 | 196 | ||
| kroB150 | 20 | 2 | 3 | 5733 | 6222.1 | 6194 | gil262 | 20 | 2 | 3 | 9184 | 11,051.5 | 10,780 | ||
| kroB150 | 25 | 1 | 2 | 48 | 96.3 | 64 | gil262 | 25 | 1 | 2 | 87 | 135.0 | 133 | ||
| kroB150 | 25 | 1 | 3 | 119 | 130.8 | 128 | gil262 | 25 | 1 | 3 | 188 | 221.7 | 215 | ||
| kroB150 | 25 | 2 | 2 | 2488 | 4270.7 | 3724 | gil262 | 25 | 2 | 3 | 9649 | 11,393.6 | 11,283 | ||
| rat195 | 10 | 1 | 2 | 87 | 90.8 | 87 | ★ | pr264 | 10 | 2 | 2 | 4682 | 7196.4 | 5416 | |
| rat195 | 20 | 1 | 3 | 167 | 167.3 | 167 | ★ | pr264 | 15 | 2 | 3 | 8985 | 10,164.7 | 9967 | |
| rat195 | 25 | 2 | 2 | 5695 | 5948.4 | 5695 | ★ | a280 | 10 | 1 | 2 | 128 | 140.2 | 128 | ★ |
| kroA200 | 10 | 1 | 2 | 44 | 76.7 | 44 | ★ | a280 | 10 | 1 | 3 | 224 | 230.1 | 224 | ★ |
| kroA200 | 10 | 1 | 3 | 110 | 140.8 | 110 | ★ | a280 | 20 | 1 | 2 | 144 | 154.0 | 144 | ★ |
| kroA200 | 10 | 2 | 2 | 2258 | 3698.8 | 2258 | ★ | a280 | 20 | 1 | 3 | 224 | 233.5 | 224 | ★ |
| kroA200 | 10 | 2 | 3 | 5655 | 7390.1 | 6660 | a280 | 25 | 1 | 2 | 147 | 158.4 | 157 | ||
| kroA200 | 15 | 1 | 2 | 48 | 105.1 | 78 | pr299 | 10 | 1 | 2 | 136 | 146.7 | 136 | ★ | |
| kroA200 | 15 | 1 | 3 | 124 | 157.7 | 139 | pr299 | 10 | 1 | 3 | 236 | 242.7 | 238 | ||
| kroA200 | 15 | 2 | 2 | 2470 | 4643.7 | 4598 | pr299 | 10 | 2 | 2 | 6792 | 7720.7 | 7263 | ||
| kroA200 | 15 | 2 | 3 | 6200 | 8056.5 | 7613 | pr299 | 10 | 2 | 3 | 11,986 | 12,117.3 | 12,057 | ||
| kroA200 | 20 | 1 | 2 | 48 | 98.8 | 84 | pr299 | 15 | 1 | 2 | 132 | 153.2 | 153 | ||
| kroA200 | 20 | 1 | 3 | 132 | 178.0 | 144 | pr299 | 20 | 1 | 3 | 238 | 253.9 | 238 | ★ | |
| kroA200 | 20 | 2 | 3 | 6654 | 8429.2 | 8302 | pr299 | 25 | 1 | 3 | 238 | 257.2 | 252 | ||
| kroA200 | 25 | 1 | 2 | 60 | 116.7 | 80 | lin318 | 10 | 1 | 2 | 152 | 173.5 | 152 | ★ | |
| kroA200 | 25 | 1 | 3 | 140 | 174.0 | 159 | lin318 | 10 | 1 | 3 | 265 | 265.2 | 265 | ★ | |
| kroA200 | 25 | 2 | 3 | 7170 | 9118.2 | 8901 | lin318 | 15 | 1 | 2 | 152 | 174.3 | 152 | ★ | |
| kroB200 | 10 | 1 | 3 | 110 | 143.1 | 110 | ★ | lin318 | 15 | 1 | 3 | 252 | 271.0 | 252 | ★ |
| kroB200 | 10 | 2 | 3 | 5675 | 7276.5 | 6680 | lin318 | 20 | 1 | 2 | 162 | 176.9 | 162 | ★ | |
| kroB200 | 15 | 1 | 2 | 47 | 89.2 | 78 | lin318 | 25 | 1 | 2 | 175 | 184.4 | 180 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Montemanni, R.; Smith, D.H. A Compact Model for the Clustered Orienteering Problem. Logistics 2024, 8, 48. https://doi.org/10.3390/logistics8020048
Montemanni R, Smith DH. A Compact Model for the Clustered Orienteering Problem. Logistics. 2024; 8(2):48. https://doi.org/10.3390/logistics8020048
Chicago/Turabian StyleMontemanni, Roberto, and Derek H. Smith. 2024. "A Compact Model for the Clustered Orienteering Problem" Logistics 8, no. 2: 48. https://doi.org/10.3390/logistics8020048
APA StyleMontemanni, R., & Smith, D. H. (2024). A Compact Model for the Clustered Orienteering Problem. Logistics, 8(2), 48. https://doi.org/10.3390/logistics8020048