
Smart Grain Storage Solution: Integrated Deep Learning Framework for Grain Storage Monitoring and Risk Alert


 ,
,
Abstract
1. Introduction
2. Materials and Methods
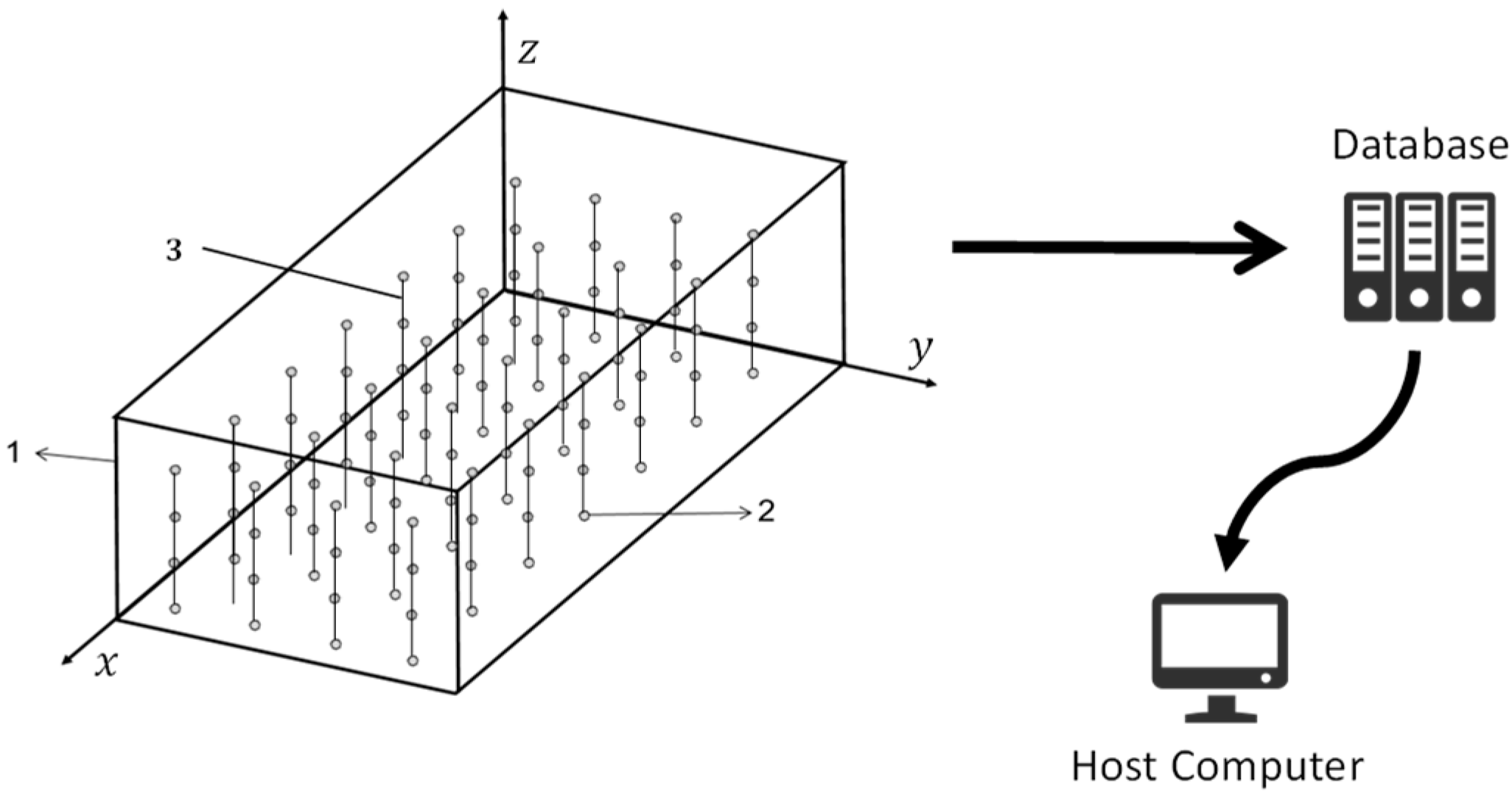
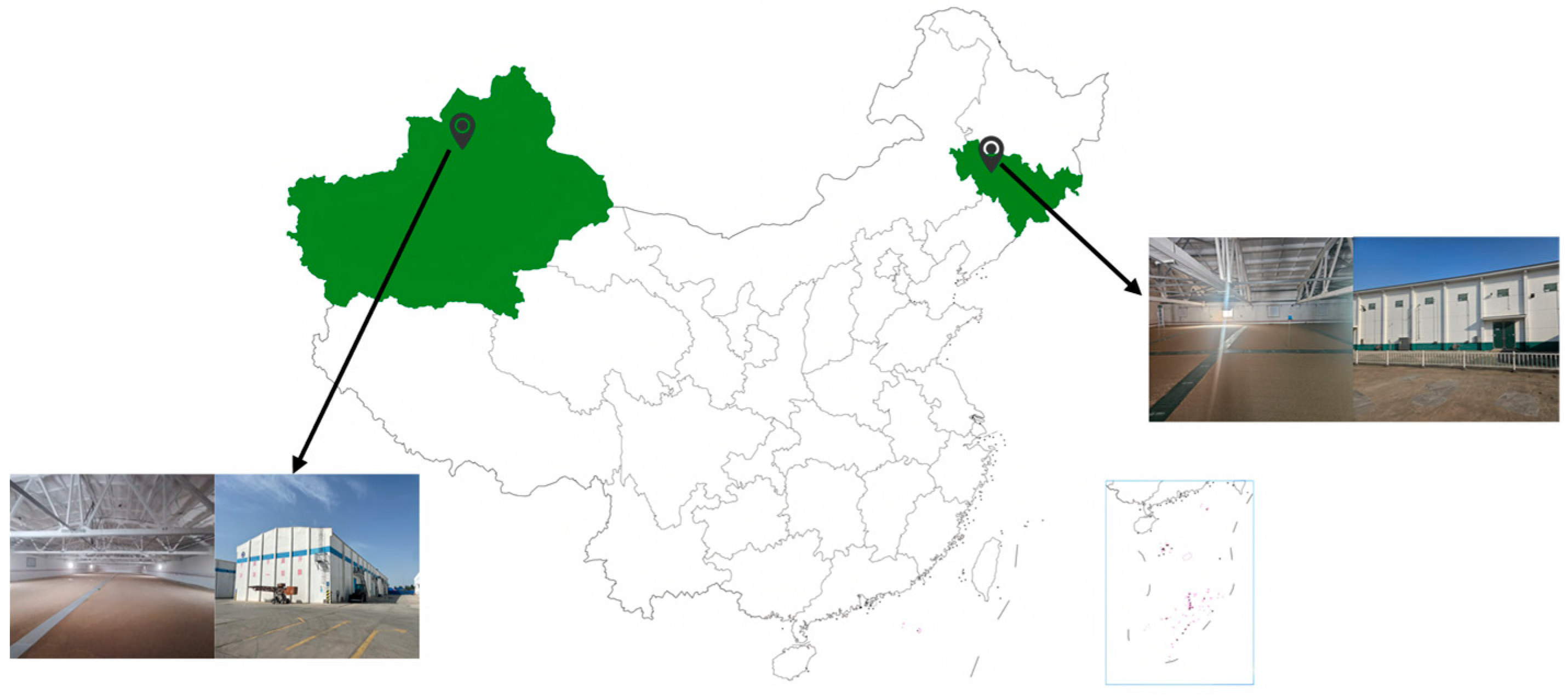
2.1. Data Sources
2.2. Data Preprocessing
2.3. Construction of Grain Storage State Classification Model Dataset
2.4. Construction of Grain Temperature Prediction Model Dataset
2.5. Integrated Deep Learning Framework for Grain Storage Monitoring and Risk Alert
2.5.1. Algorithm Architecture
2.5.2. Grain Storage State Classification Model Based on 3D DenseNet
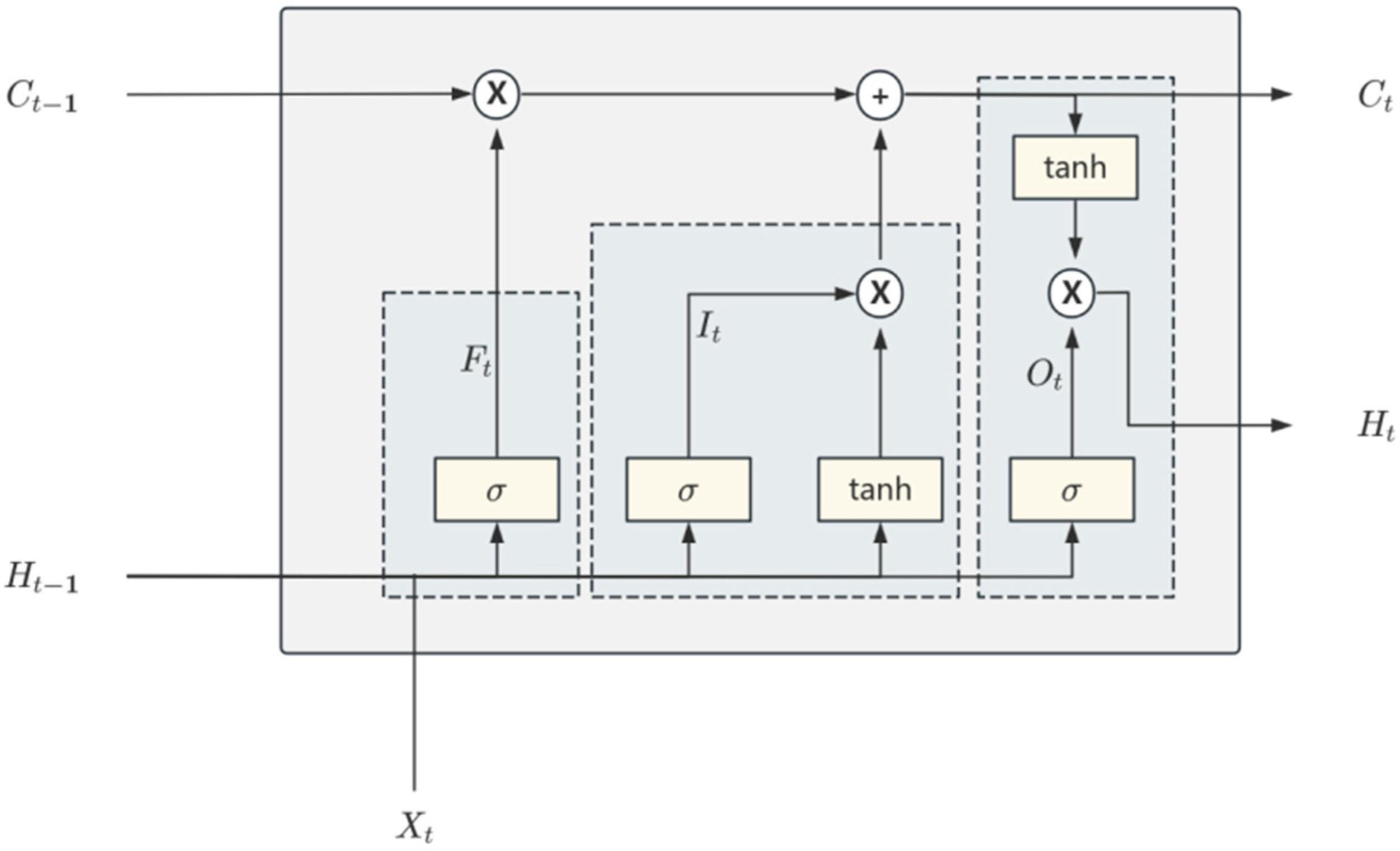
2.5.3. Grain Temperature Prediction Model Based on 3DCNN-LSTM
2.6. Model Training and Hyperparameter Tuning
2.7. Evaluation Metrics
3. Results and Discussion
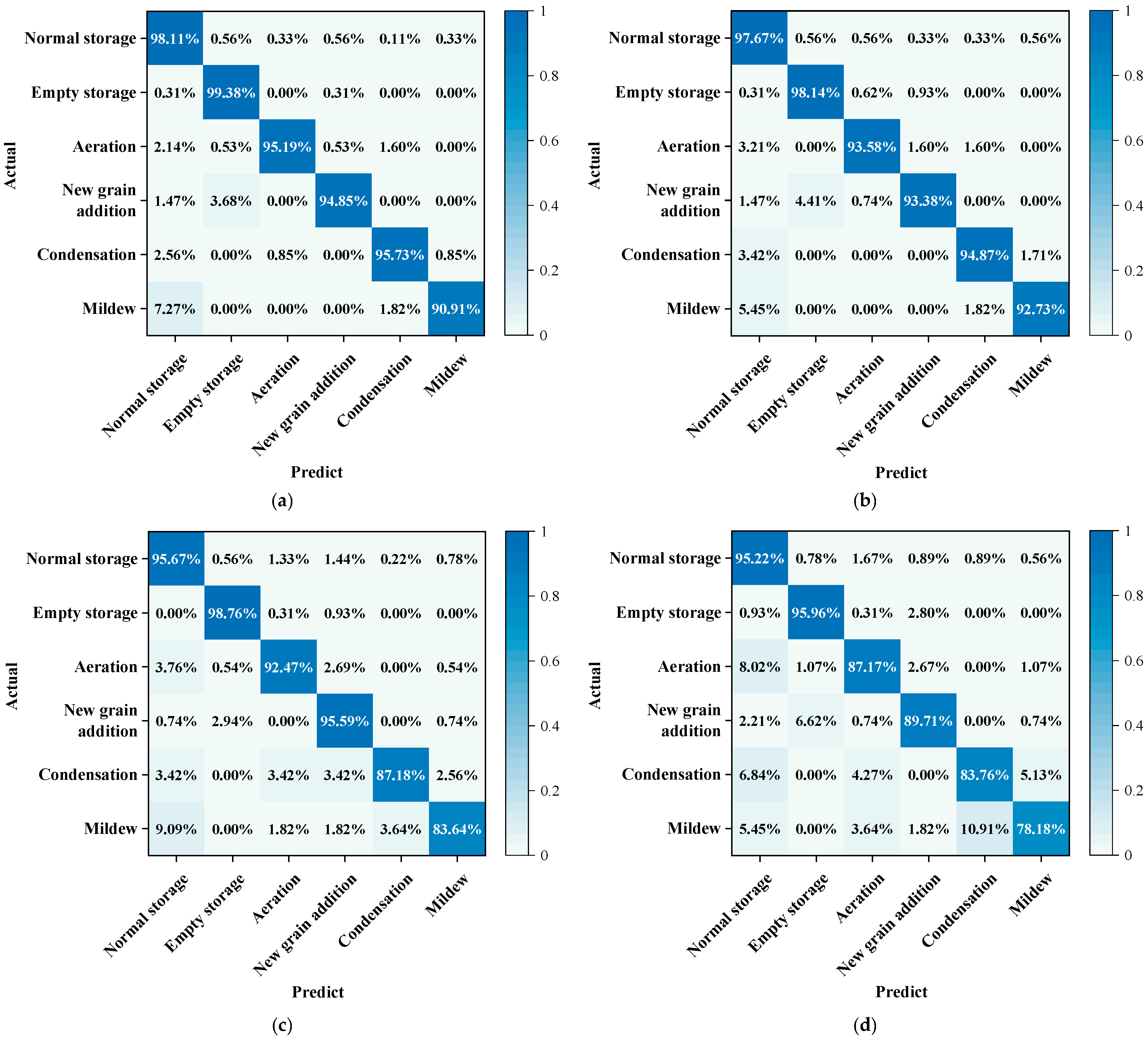
3.1. Comparison of Grain Storage State Classification Model Performance
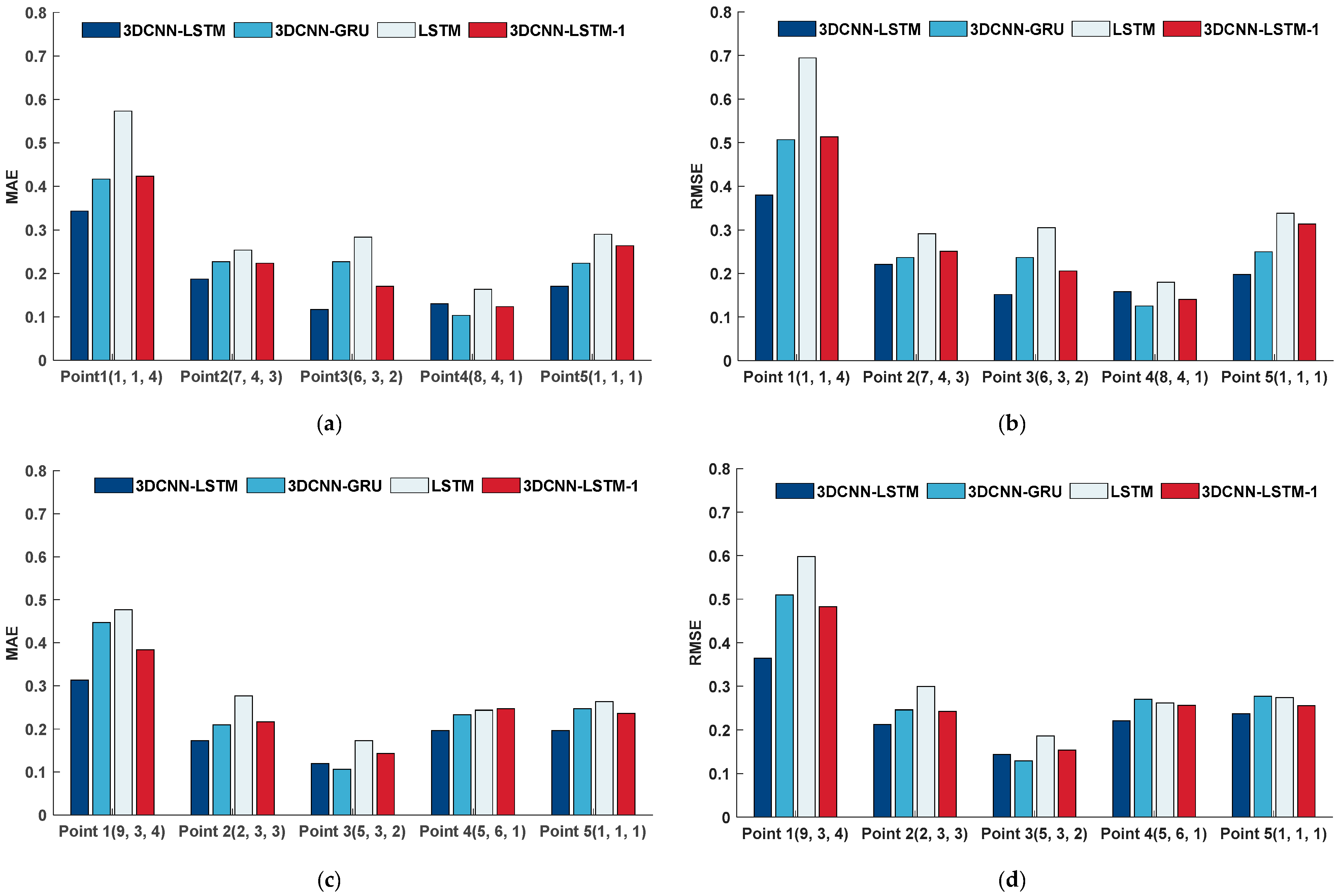
3.2. Comparison of Grain Temperature Prediction Model Performance
3.3. Potential Risk Early Warning Experiment
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jian, Y.; Zhang, Q.; Ge, L.; Jiang, Y. Technical methods of national security supervision: Grain storage security as an example. J. Saf. Sci. Resil. 2023, 41, 61–74. [Google Scholar] [CrossRef]
- Tushar, S.R.; Alam, M.F.B.; Zaman, S.M.; Garza-Reyes, J.A.; Bari, A.B.M.M.; Karmaker, C.L. Analysis of the factors influencing the stability of stored grains: Implications for agricultural sustainability and food security. Sustain. Oper. Comput. 2023, 4, 40–52. [Google Scholar] [CrossRef]
- Said, P.; Pradhan, R. Food grain storage practices: A review. J. Grain Process. Stor. 2014, 11, 1–5. [Google Scholar]
- Bhardwaj, S.; Sharma, R. The challenges of grain storage: A review. Int. J. Farm Sci. 2020, 102, 18–22. [Google Scholar] [CrossRef]
- Valmor, Z.; Ricardo, T.P.; Cristiano, D.F. Grain storage systems and effects of moisture, temperature and time on grain quality—A review. J. Stored Prod. Res. 2021, 91, 101770. [Google Scholar] [CrossRef]
- Éverton, L.; Paulo, C.C. Applications of new technologies for monitoring and predicting grains quality stored: Sensors, Internet of Things, and Artificial Intelligence. Measurement 2022, 188, 110609. [Google Scholar] [CrossRef]
- Kuyu, C.G.; Tola, Y.B.; Mohammed, A.; Mengesh, A.; Mpagalile, J. Evaluation of different grain storage technologies against storage insect pests over an extended storage time. J. Stored Prod. Res. 2022, 96, 101945. [Google Scholar] [CrossRef]
- Liu, X.; Li, B.; Shen, D.; Cao, J.; Mao, B. Analysis of grain storage loss based on decision tree algorithm. Procedia Comput. Sci. 2017, 122, 130–137. [Google Scholar] [CrossRef]
- Zhao, Z.; Wu, C. Wheat Quantity Monitoring Methods Based on Inventory Measurement and SVR Prediction Model. Appl. Sci. 2023, 13, 12745. [Google Scholar] [CrossRef]
- Li, L.; Fei, X.; Dong, Z.; Yang, T. Computer vision-based method for monitoring grain quantity change in warehouses. Grain Oil Sci. Technol. 2020, 3, 87–99. [Google Scholar] [CrossRef]
- Duysak, H.; Yigit, E. Machine learning based quantity measurement method for grain silos. Measurement 2020, 152, 107279. [Google Scholar] [CrossRef]
- Yigit, E. A novel compressed sensing based quantity measurement method for grain silos. Comput. Electron. Agric. 2018, 145, 179–186. [Google Scholar] [CrossRef]
- Wu, Z.; Zhang, Q.; Yin, J.; Wang, X.; Zhang, Z.; Wu, W.; Li, F. Interactions of mutiple biological fields in stored grain ecosystems. Sci. Rep. 2020, 101, 9302. [Google Scholar] [CrossRef]
- Wu, W.; Cui, H.; Han, F.; Liu, Z.; Wu, X.; Wu, Z.; Zhang, Q. Digital monitoring of grain conditions in large-scale bulk storage facilities based on spatiotemporal distributions of grain temperature. Biosyst. Eng. 2021, 210, 247–260. [Google Scholar] [CrossRef]
- Ge, L.; Chen, C.; Li, Y.; Mo, T.; Li, W. A CNN-based temperature prediction approach for grain storage. Int. J. Internet Manuf. Serv. 2020, 7, 345–357. [Google Scholar] [CrossRef]
- Li, Z.; Si, Y.; Zhu, Y. Research on grain-stored temperature prediction model based on improved SVR algorithm. J. Comput. Methods Sci. Eng. 2023, 233, 1547–1559. [Google Scholar] [CrossRef]
- Yin, J. Research on Multi-Fields Coupling Model of Wheat Grain and Condensation Prediction. Ph.D. Thesis, Jilin University, Changchun, China, 2015. [Google Scholar]
- Wang, X. Study on Mechanism and Model of Microbial Field and Multi-Fields Interaction in Grain Bulk. Ph.D. Thesis, Jilin Univrsity, Changchun, China, 2019. [Google Scholar]
- Ding, H.; Huang, N.; Cui, X. Leveraging GANs data augmentation for imbalanced medical image classification. Appl. Soft Comput. 2024, 165, 112050. [Google Scholar] [CrossRef]
- Li, H.; Wang, C.; Liu, Y. Aircraft skin defect detection based on Fourier GAN data augmentation under limited samples. Measurement 2025, 245, 116657. [Google Scholar] [CrossRef]
- Ho, J.P.; Yang, S. Fission source convergence diagnosis in Monte Carlo eigenvalue calculations by skewness and kurtosis estimation methods. Nucl. Eng. Technol. 2024, 569, 247–260. [Google Scholar] [CrossRef]
- Yakubu, U.A.; Saputra, M.P.A. Time series model analysis using autocorrelation function (ACF) and partial autocorrelation function (PACF) for E-wallet transactions during a pandemic. Int. J. Global Oper. Res. 2022, 33, 80–85. [Google Scholar] [CrossRef]
- Zhang, E.; Xue, B.; Cao, F.; Duan, J.; Lin, G.; Lei, Y. Fusion of 2D CNN and 3D DenseNet for Dynamic Gesture Recognition. Electronics 2019, 8, 1511. [Google Scholar] [CrossRef]
- Jian, F.; Jayas, D.S. The ecosystem approach to grain storage. Agric. Res. 2012, 1, 148–156. [Google Scholar] [CrossRef]
- Chen, S. Study on Heat and Humidity Migration and Granary Aeration Management Based on Absolute Water Potential. Ph.D. Thesis, Jilin University, Changchun, China, 2016. [Google Scholar]
- Tran, D.; Bourdev, L.; Fergus, R.; Torresani, L.; Paluri, M. Learning spatiotemporal features with 3D convolutional networks. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 4489–4497. [Google Scholar] [CrossRef]
- Graves, A.; Graves, A. Long short-term memory. In Supervised Sequence Labelling with Recurrent Neural Networks; Springer: Berlin/Heidelberg, Germany, 2012; pp. 37–45. [Google Scholar] [CrossRef]
- Gao, J.; Nuyttens, D.; Lootens, P.; He, Y.; Pieters, J.G. Recognising weeds in a maize crop using a random forest machine-learning algorithm and near-infrared snapshot mosaic hyperspectralimagery. Biosyst. Eng. 2018, 170, 39–50. [Google Scholar] [CrossRef]
- Kuswidiyanto, L.W.; Wang, P.; Noh, H.; Jung, H.; Jung, D.; Han, X. Airborne hyperspectral imaging for early diagnosis of kimchi cabbage downy mildewusing 3D-ResNet and leaf segmentation. Comput. Electron. Agric. 2023, 214, 108312. [Google Scholar] [CrossRef]
- Yang, Q.; Chen, M.; Xiao, D.; Huang, S.; Hui, X. Long-term video activity monitoring and anomaly alerting of group-housed pigs. Comput. Electron. Agric. 2024, 224, 109205. [Google Scholar] [CrossRef]
- Noor, A.; Benjdira, B.; Ammar, A.; Koubaa, A. DriftNet: Aggressive driving behavior classification using 3D EfficientNet architecture. Oper. Res. 2022, 33, 80–85. [Google Scholar]
- Liu, Z.; Yang, C.; Huang, J.; Liu, S.; Zhou, Y.; Lu, X. Deep learning framework based on integration of S-Mask R-CNN and Inception-v3 for ultrasound image-aided diagnosis of prostate cancer. Future Gener. Comput. Syst. 2021, 114, 358–367. [Google Scholar] [CrossRef]
- Scott, M.L.; Lee, S. A unified approach to interpreting model predictions. Adv. Neural Inf. Process. Syst. 2017, 30, 4768–4777. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Storage Location | Normal Storage | Empty Storage | Aeration | New Grain Addition | Condensation | Mildew |
|---|---|---|---|---|---|---|
| Anhui | 76,426 | 32 | 10 | 28 | 7 | 1 |
| Fujian | 21,682 | 95 | 11 | 0 | 7 | 0 |
| Jiangxi | 9692 | 5 | 35 | 0 | 9 | 10 |
| Henan | 6707 | 34 | 0 | 38 | 15 | 9 |
| Hubei | 12,901 | 39 | 27 | 0 | 5 | 3 |
| Hunan | 1947 | 41 | 0 | 22 | 5 | 0 |
| Guangdong | 7468 | 16 | 12 | 0 | 1 | 0 |
| Guizhou | 8502 | 39 | 5 | 31 | 11 | 3 |
| Shanxi | 11,430 | 42 | 17 | 3 | 26 | 7 |
| Gansu | 29,022 | 51 | 6 | 59 | 14 | 3 |
| Jilin | 13,758 | 92 | 86 | 29 | 5 | 0 |
| Xinjiang | 21,725 | 51 | 103 | 17 | 16 | 9 |
| Total | 221,260 | 537 | 312 | 227 | 121 | 45 |
| Value | |
|---|---|
| Mean (°C) | 7.27 |
| Median (°C) | 6.06 |
| Standard Deviation (°C) | 11.41 |
| Maximum (°C) | −15.7 |
| Minimum (°C) | 38.7 |
| Skewness | 0.17 |
| Kurtosis | −0.98 |
| Parameter | Value Range | Optimal Parameter Settings |
|---|---|---|
| Learning Rate | 0.0001, 0.001, 0.01 | 0.001 |
| Base Channels | 16, 32, 64 | 32 |
| Dropout Rate | 0.2, 0.3, 0.5 | 0.3 |
| Num Dense Blocks | 3, 4 | 3 |
| Num Layers Per block | 3, 4, 5 | 4 |
| Compression Rate | 0.3, 0.5, 0.7 | 0.5 |
| Parameter | Value Range | Optimal Parameter Settings |
|---|---|---|
| Learning Rate | 0.0001, 0.001, 0.01 | 0.001 |
| LSTM Hidden Size | 64, 128, 256 | 128 |
| LSTM Layers | 2, 3, 4 | 3 |
| Dropout Rate | 0.3, 0.5, 0.7 | 0.5 |
| Time Window | 30, 35, 40 | 35 |
| Model | Accuracy | Precision | Recall | F1 |
|---|---|---|---|---|
| 3D DenseNet | 97.38% | 0.9596 | 0.9602 | 0.9585 |
| 3D ResNet | 96.62% | 0.9506 | 0.9431 | 0.9467 |
| 3D InceptionV3 | 94.93% | 0.9222 | 0.9074 | 0.9135 |
| 3D EfficientNet | 92.72% | 0.8833 | 0.8752 | 0.8790 |
| Model | MAE (°C) | RMSE (°C) |
|---|---|---|
| 3DCNN-LSTM | 0.24 | 0.28 |
| 3DCNN-GRU | 0.29 | 0.32 |
| LSTM | 0.34 | 0.38 |
| 3DCNN-LSTM-1 | 0.27 | 0.31 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Wu, W.; Guo, H.; Wu, Y.; Li, S.; Wang, W.; Lu, Y. Smart Grain Storage Solution: Integrated Deep Learning Framework for Grain Storage Monitoring and Risk Alert. Foods 2025, 14, 1024. https://doi.org/10.3390/foods14061024
Li X, Wu W, Guo H, Wu Y, Li S, Wang W, Lu Y. Smart Grain Storage Solution: Integrated Deep Learning Framework for Grain Storage Monitoring and Risk Alert. Foods. 2025; 14(6):1024. https://doi.org/10.3390/foods14061024
Chicago/Turabian StyleLi, Xinze, Wenfu Wu, Hongpeng Guo, Yunshandan Wu, Shuyao Li, Wenyue Wang, and Yanhui Lu. 2025. "Smart Grain Storage Solution: Integrated Deep Learning Framework for Grain Storage Monitoring and Risk Alert" Foods 14, no. 6: 1024. https://doi.org/10.3390/foods14061024
APA StyleLi, X., Wu, W., Guo, H., Wu, Y., Li, S., Wang, W., & Lu, Y. (2025). Smart Grain Storage Solution: Integrated Deep Learning Framework for Grain Storage Monitoring and Risk Alert. Foods, 14(6), 1024. https://doi.org/10.3390/foods14061024