A Vibration Signal Detection System Based on Double Intensity Modulation



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. System Principle
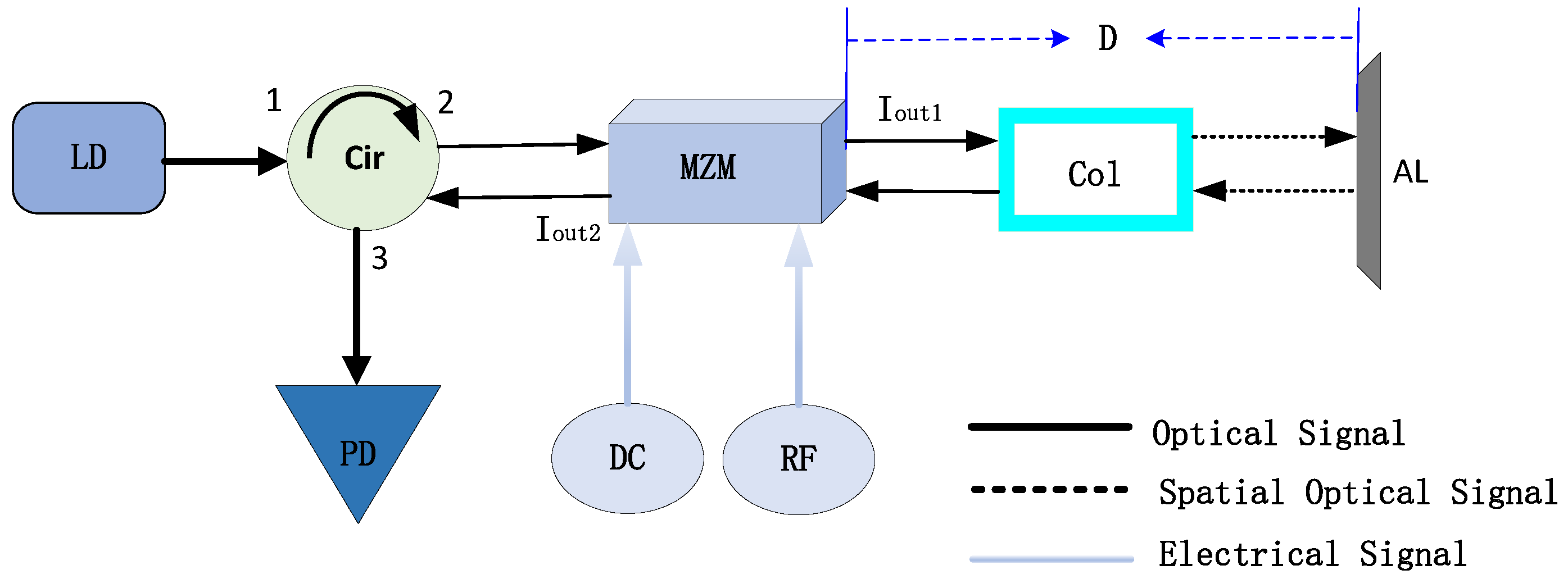
2.1. Double Modulation Principle
2.2. Vibration Signal Detection Principle
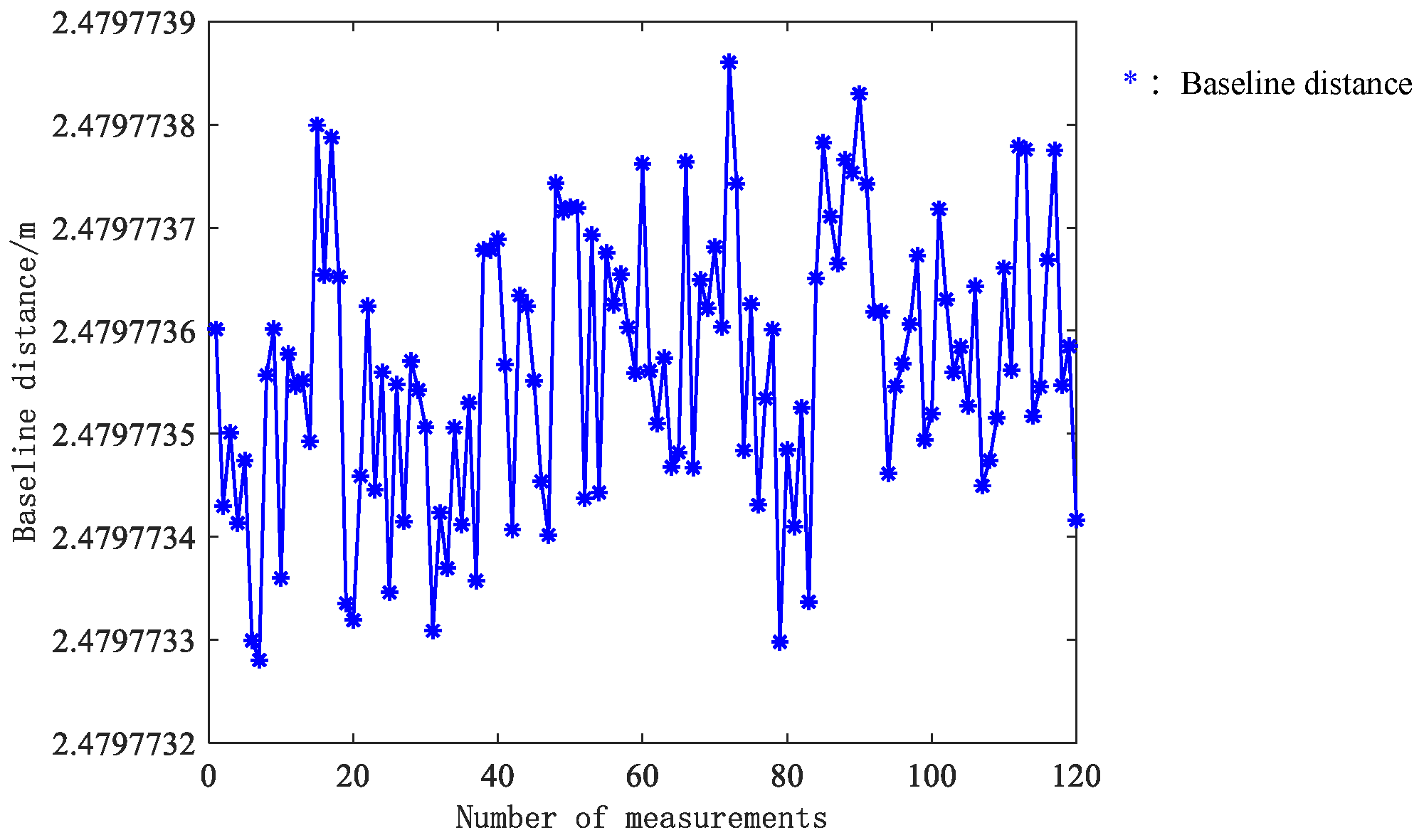
2.2.1. Obtaining the Baseline Distance
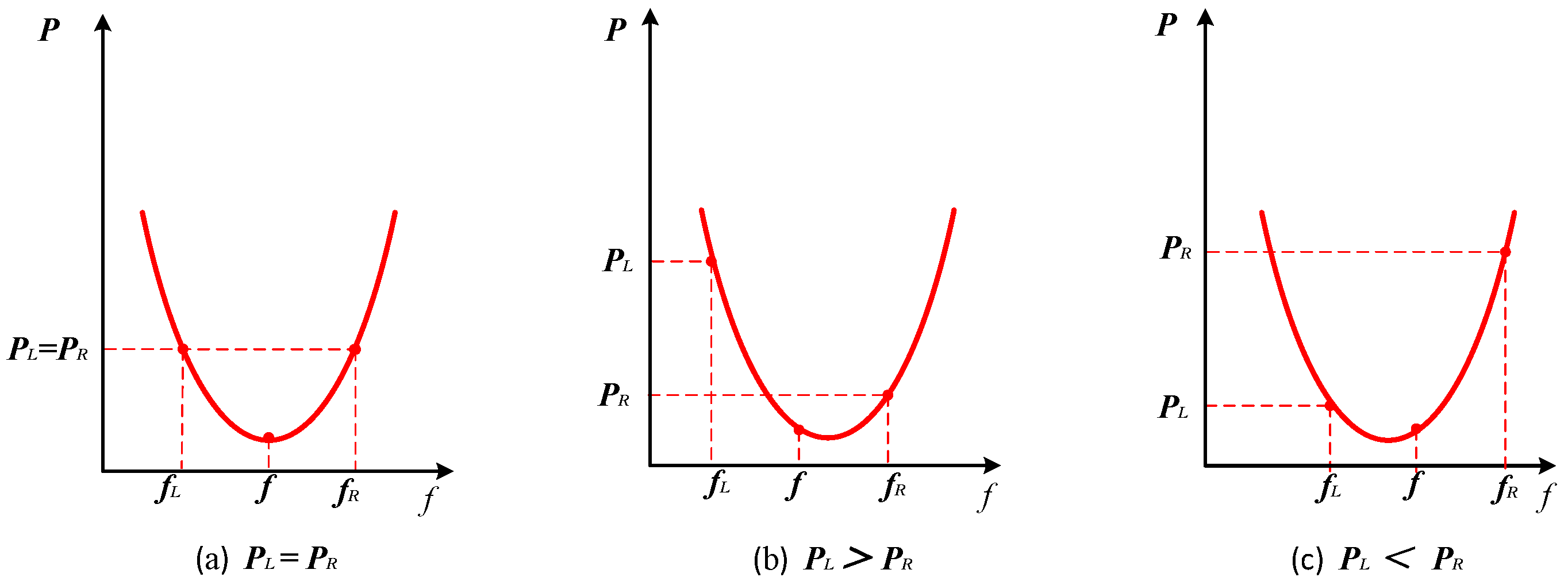
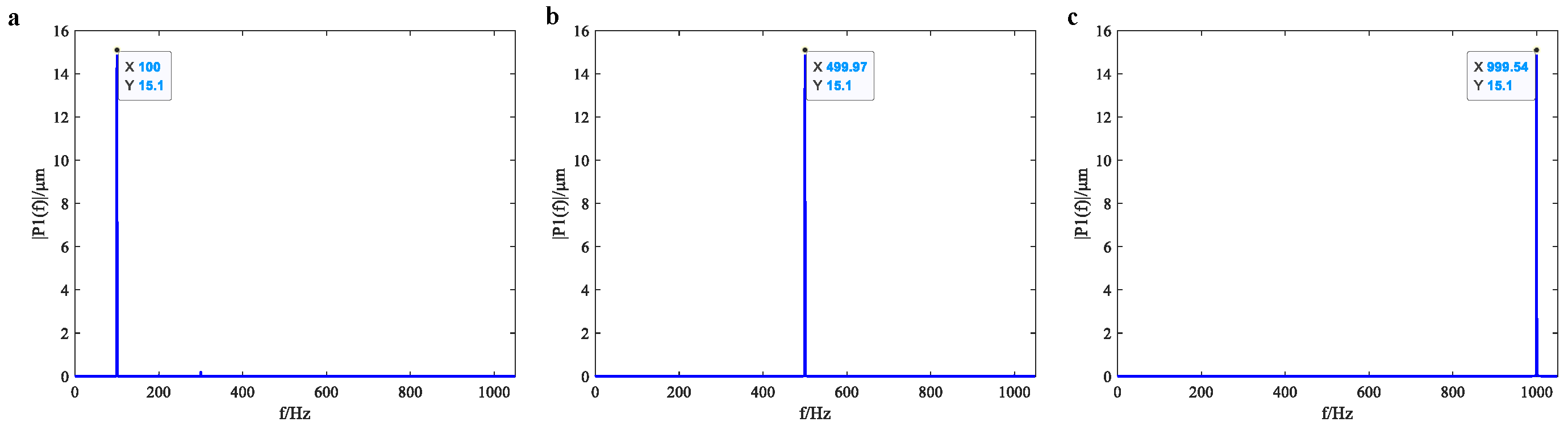
2.2.2. Obtaining Frequency Values by Swing Fitting
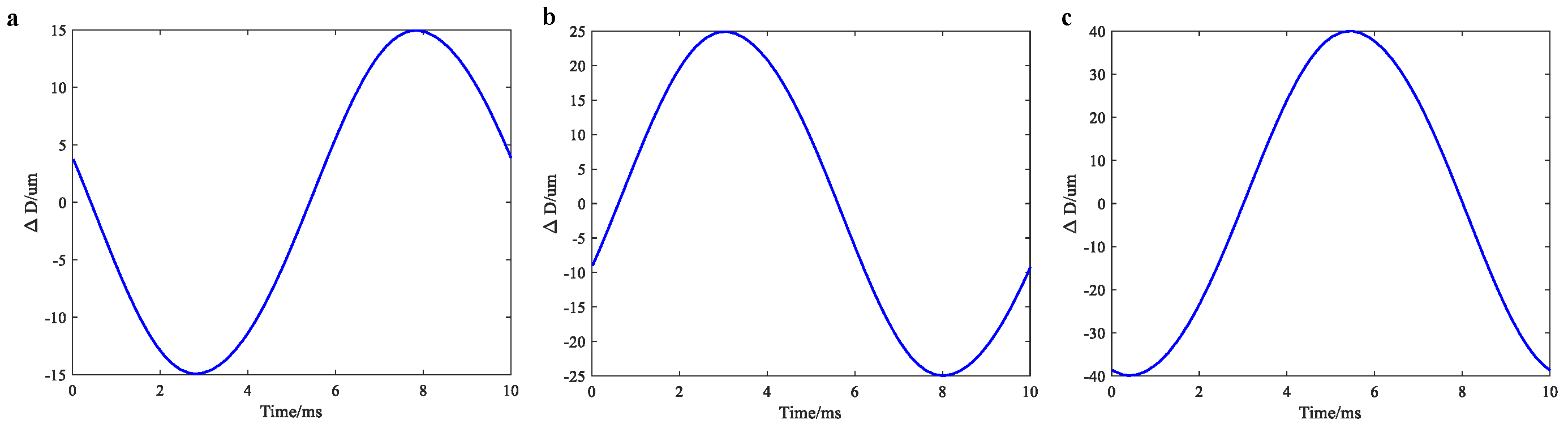
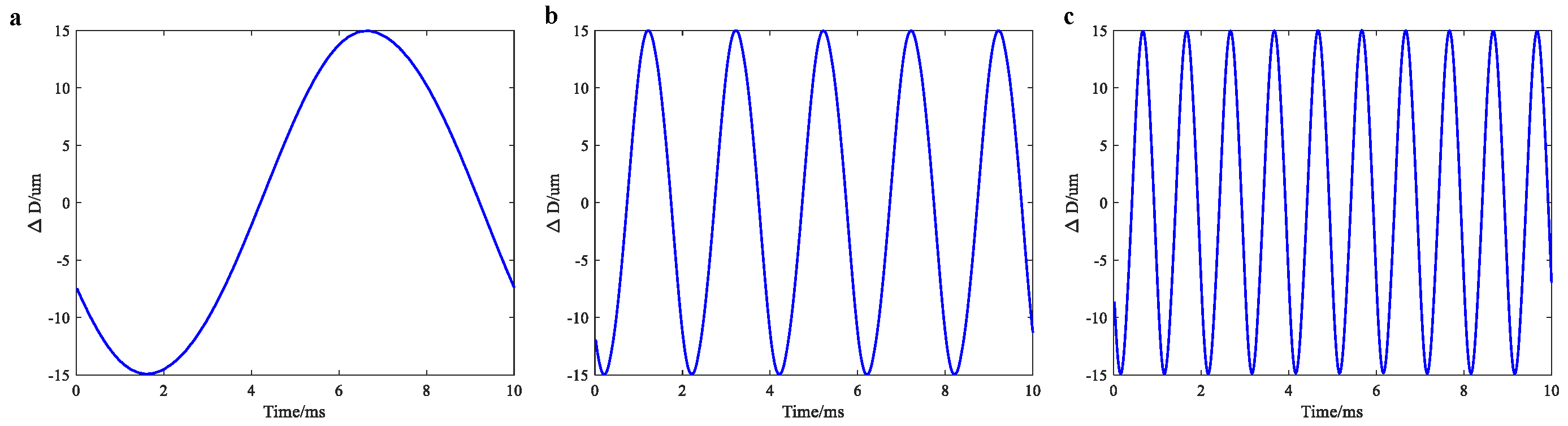
2.2.3. Vibration Displacement Measurement
2.3. Analysis of the Vibration Displacement Range
3. Experiment System Setup
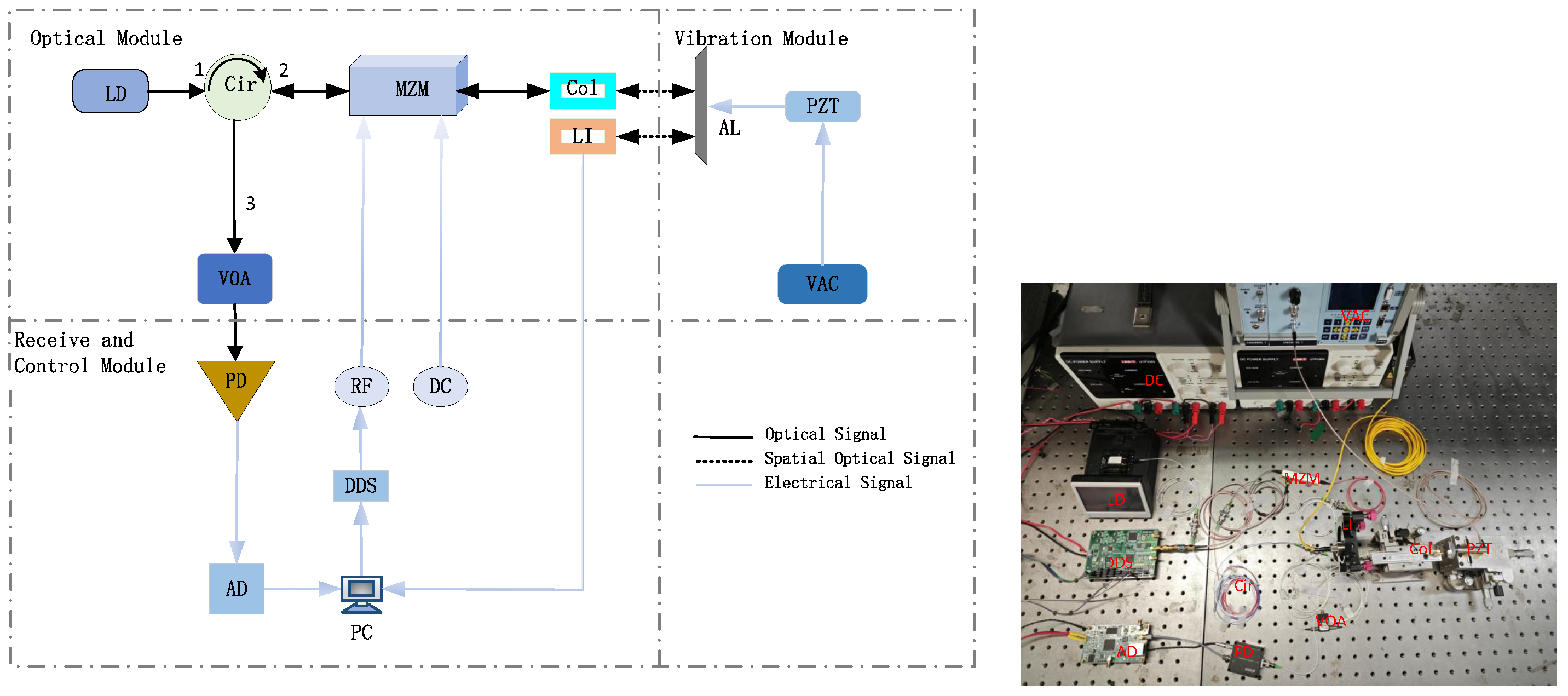
3.1. Hardware System Setup
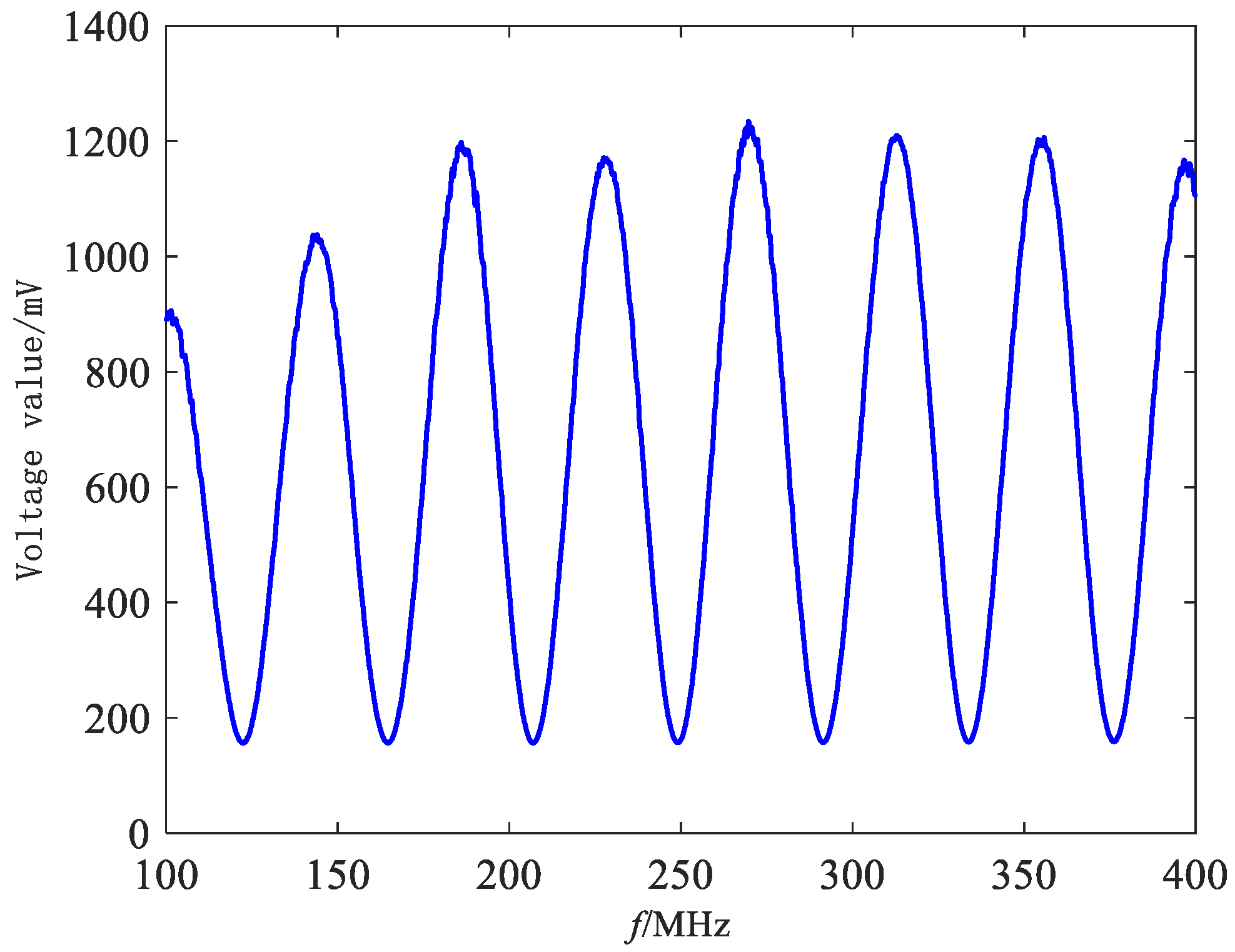
3.2. Sweep Curve Measurement
4. Experimental Results and Analysis
4.1. Baseline Distance Measurement Results
4.2. Vibration Signal Measurement Results
4.2.1. Laser Interferometer Measurement Results
4.2.2. Measurement Results of Experimental System
4.3. Measurement Accuracy Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Luo, Q.; Luo, H.; Fan, Y.; Wu, G.; Chen, H.; Pan, Y.; Jiang, W.; Su, J. Study of Point Scanning Detection Mechanisms for Vibration Signals with Wavefront Sensors. Photonics 2025, 12, 78. [Google Scholar] [CrossRef]
- Yu, D.; Wang, G.; Zhao, Y. On-Orbit Measurement and Analysis of the Micro-vibration in a Remote-Sensing Satellite. Adv. Astronaut. Sci. Technol. 2018, 1, 191–195. [Google Scholar] [CrossRef]
- de Araújo, R.D.B.; Rocha, J.M.M.; Santos, M.A.d.; Ramalho, G.L.B. Fast Detection of Centrifugal Pumps Condition by Structural Analysis of MEMS Sensor Signals. J. Control Autom. Electr. Syst. 2021, 33, 293–303. [Google Scholar] [CrossRef]
- Hegde, V.; Rao, M.G.S. Detection of Stator Winding Inter-Turn Short Circuit Fault in Induction Motor Using Vibration Signals by MEMS Accelerometer. Electr. Power Compon. Syst. 2017, 45, 1463–1473. [Google Scholar] [CrossRef]
- Chen, R. High Precision Fibre Optic Sensing System for Vibration Monitoring. Master’s Thesis, Chongqing Polytechnic University, Chongqing, China, 2019. [Google Scholar]
- Fedorova, D.; Tlach, V.; Kuric, I.; Dodok, T.; Zajačko, I.; Tucki, K. Technical Diagnostics of Industrial Robots Using Vibration Signals: Case Study on Detecting Base Unfastening. Appl. Sci. 2024, 15, 270. [Google Scholar] [CrossRef]
- Shen, X.; Zhou, S.; Li, D. Microdisplacement Measurement Based on F-P Etalon: Processing Method and Experiments. Sensors 2021, 21, 3749. [Google Scholar] [CrossRef]
- Zhang, M. MKurt-LIA: Mechanical fault vibration signal measurement scheme with frequency tracking capability for bearing condition monitoring. Meas. Sci. Technol. 2024, 35, 096124. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, Y.; Du, H.; Zeng, Q.; Xiong, X. High-precision displacement measurement model for the grating interferometer system. Opt. Eng. 2020, 59, 045101. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; Han, D.; He, Z. An enhanced stochastic resonance method for weak feature extraction from vibration signals in bearing fault detection. Proc. Inst. Mech. Eng. Part J. Mech. Eng. Sci. 2014, 228, 815–827. [Google Scholar] [CrossRef]
- Wang, Z. Microvibration and Microseismic Signal Monitoring. Ph.D. Thesis, University of Science and Technology of China (USTC), Hefei, China, 2024. [Google Scholar]
- Haifan, P.; Haixiang, J.; Qi, G. Accurate measurement and mechanical parameter extraction of sports based on optical force sensors. Int. J. Adv. Manuf. Technol. 2024, 1–10. [Google Scholar] [CrossRef]
- Li, J.; Li, J. FPGA-based laser displacement measurement system design. Ind. Control Comput. 2019, 32, 2. [Google Scholar]
- Pan, W.; Feng, X.; Liu, X.; Zhang, X. Fibre-optic Mach-Zönder interferometric microdisplacement measurement system. Adv. Lasers Photon. 2024, 3, 1–13. [Google Scholar]
- Jia, P.; Xie, J.; Lou, Y.; Yang, Y.; Yang, T. Research on fibre optic interferometric vibration measurement system based on internal modulation. Photovolt. Eng. 2025, 52, 12–25. [Google Scholar]
- Shi, Y.; Xu, Z.; Wu, J.; Chen, L.; Liang, Y.; Sun, Q.; Zhou, Z. Ultra-low frequency high-precision displacement measurement based on dual-polarization differential fiber heterodyne interferometer. J. Light. Technol. 2023, 41, 5773–5779. [Google Scholar] [CrossRef]
- Di Maio, D.; Castellini, P.; Martarelli, M.; Rothberg, S.; Allen, M.; Zhu, W.; Ewins, D. Continuous Scanning Laser Vibrometry: A raison d’être and applications to vibration measurements. Mech. Syst. Signal Process. 2021, 156, 107573. [Google Scholar] [CrossRef]
- Li, L.; Wang, L.; Yuan, L.; Zheng, R.; Wu, Y.; Sui, J.; Zhong, J. Micro-vibration suppression methods and key technologies for high-precision space optical instruments. Acta Astronaut. 2021, 180, 417–428. [Google Scholar] [CrossRef]
- Mohd Ghazali, M.H.; Rahiman, W. Vibration analysis for machine monitoring and diagnosis: A systematic review. Shock Vib. 2021, 2021, 9469318. [Google Scholar] [CrossRef]
- Yamaguchi, Y.; Dat, P.T.; Takano, S.; Motoya, M.; Hirata, S.; Kataoka, Y.; Ichikawa, J.; Oikawa, S.; Shimizu, R.; Yamamoto, N.; et al. Traveling-wave Mach-Zehnder modulator integrated with electro-optic frequency-domain equalizer for broadband modulation. J. Light. Technol. 2023, 41, 3883–3891. [Google Scholar] [CrossRef]
- Morton, P.A.; Khurgin, J.B.; Morton, M.J. All-optical linearized Mach-Zehnder modulator. Opt. Express 2021, 29, 37302–37313. [Google Scholar] [CrossRef]
- Dev, S.; Singh, K.; Hosseini, R.; Misra, A.; Catuneanu, M.; Preußler, S.; Schneider, T.; Jamshidi, K. Compact and energy-efficient forward-biased PN silicon Mach-Zehnder modulator. IEEE Photonics J. 2022, 14, 1–7. [Google Scholar] [CrossRef]
- Valdez, F.; Mere, V.; Wang, X.; Mookherjea, S. Integrated O-and C-band silicon-lithium niobate Mach-Zehnder modulators with 100 GHz bandwidth, low voltage, and low loss. Opt. Express 2023, 31, 5273–5289. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Li, J.; Xiang, Z.; Liu, J. A Design of All-Optical Integrated Linearized Modulator Based on Asymmetric Mach-Zehnder Modulator. Photonics 2023, 10, 229. [Google Scholar] [CrossRef]
- Hu, C. Research on Large Size Measurement Method Based on Laser Interference Principle. Ph.D. Thesis, University of Chinese Academy of Sciences (Institute of Optoelectronic Technology, Chinese Academy of Sciences), Beijing, China, 2022. [Google Scholar]
- Tong, L.; Liu, Z.; Guan-yu, Z.; Chen, C.; Zhi-cheng, Z. A Laser Interferometric Subnano-Scale Micro-Displacement Measurement System Based on Variable Phase Retardation. Spectrosc. Spectr. Anal. 2018, 39, 377–382. [Google Scholar]
- Sun, Z. Application of Bessel functions in computing the integrals of several special trigonometric functions. Math. Eng. 1989, 77–79. [Google Scholar]
- Chaudhary, P.K.; Gupta, V.; Pachori, R.B. Fourier-Bessel representation for signal processing: A review. Digit. Signal Process. 2023, 135, 103938. [Google Scholar] [CrossRef]
- Zhao, B. FPGA Algorithm Implementation for Double Modulation Distance Measurement. Master’s Thesis, Tianjin University (TJU), Tianjin, China, 2024. [Google Scholar]
- Wang, J.; Shao, Q.; Yu, J.; He, K.; Luo, H. Laser Ranging System Based on Double Intensity Modulation. Phys. J. 2023, 72, 45–53. [Google Scholar] [CrossRef]
- Xiao, Y.; Yu, J.; Wang, J.; Wang, W.; Wang, Z.; Xie, T.; Yu, Y.; Xue, J. Relationship between modulation frequency and ranging accuracy in secondary polarization modulation ranging systems. Phys. J. 2016, 65, 44–48. [Google Scholar]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; He, K.; Yu, J.; Luo, H.; Shao, Q.; Ma, C. A Vibration Signal Detection System Based on Double Intensity Modulation. Photonics 2025, 12, 364. https://doi.org/10.3390/photonics12040364
Wang J, He K, Yu J, Luo H, Shao Q, Ma C. A Vibration Signal Detection System Based on Double Intensity Modulation. Photonics. 2025; 12(4):364. https://doi.org/10.3390/photonics12040364
Chicago/Turabian StyleWang, Ju, Kerui He, Jinlong Yu, Hao Luo, Qi Shao, and Chuang Ma. 2025. "A Vibration Signal Detection System Based on Double Intensity Modulation" Photonics 12, no. 4: 364. https://doi.org/10.3390/photonics12040364
APA StyleWang, J., He, K., Yu, J., Luo, H., Shao, Q., & Ma, C. (2025). A Vibration Signal Detection System Based on Double Intensity Modulation. Photonics, 12(4), 364. https://doi.org/10.3390/photonics12040364