1. Introduction
With the advancement of technology and the growing demand for space exploration, there are increasingly higher requirements for telescope design. According to the Rayleigh criterion, a telescope’s resolution is limited by the aperture size of its primary mirror; a larger primary mirror aperture translates to higher resolution and greater light-gathering capability. However, due to constraints in design, manufacturing, and processing costs, constructing a single-aperture primary mirror telescope with a diameter greater than 8 m is extremely challenging [
1]. Synthetic aperture technology involves stitching together two or more segments to achieve a resolution and light-gathering capability equivalent to a single-aperture primary mirror. The European Southern Observatory (ESO) is constructing the Extremely Large Telescope (ELT) [
2], whose primary mirror consists of 798 hexagonal segments; the Thirty Meter Telescope (TMT) features a segmented primary mirror composed of 492 hexagonal segments [
3]; the Giant Magellan Telescope (GMT) is made up of seven 8.4 m primary mirrors [
4]; and the James Webb Space Telescope (JWST), currently in orbit, has an 18-segment hexagonal primary mirror [
5,
6,
7]. However, for these segmented mirrors to achieve the same resolution and light-gathering power as an equivalent single-aperture primary mirror, they must be optically co-phased. Piston error refers to the axial optical path difference of each segment relative to the same wavefront and must be constrained within a range of 0.05λ.
Since the introduction of synthetic aperture technology, numerous effective methods for detecting piston errors have been proposed by researchers worldwide, which can be broadly classified into two categories: pupil plane detection and focal plane detection. Pupil plane detection involves analyzing images of the pupil plane’s light intensity captured by sensors. Techniques in this category include the Shack–Hartmann broadband and narrowband phasing methods [
8], curvature sensing [
9], interferometry-based methods [
10], pyramid wavefront sensing [
11], dispersed fringe sensing [
12,
13,
14], and Zernike phase contrast methods [
15]. These methods are characterized by their high real-time performance, enabling rapid measurement of piston errors in segmented mirrors, but they increase the complexity of the optical system. Focal plane detection methods, on the other hand, utilize wavefront-free sensing techniques to capture light intensity information at or near the focal plane and calculate piston errors using specific algorithms. While this approach simplifies the optical system structure to some extent, it suffers from a narrow detection range, prolonged iterative processes, and poor convergence stability. Examples of such methods include phase retrieval [
16], phase diversity [
17], and modified particle swarm optimization algorithms [
18].
In recent years, the rapid development of artificial intelligence has led to the interdisciplinary integration of deep learning and optics, offering new solutions for piston error detection. As early as 1990, Angel et al. in the United States first proposed a neural network-based approach for piston error detection across multiple telescopes [
19]. In 2018, Guerra-Ramos et al. in Spain utilized a convolutional neural network (CNN) to detect piston errors in a 36-segment mirror system, overcoming the 2π phase range limitation using a four-wavelength system, achieving an accuracy of ±0.0087λ [
20]. In 2019, Li Dequan and colleagues from the Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences developed a dataset using an M-sharpness function for target-independent piston error detection [
21]. Concurrently, Ma Xiafei and her team from the Institute of Optics and Electronics, Chinese Academy of Sciences employed a deep convolutional neural network (DCNN) to model the relationship between the point spread function of a system and piston errors, validating the method’s feasibility through simulations and experiments [
22]. In 2021, Wang et al. from the Xi’an Institute of Optics and Precision Mechanics of Chinese Academy of Sciences combined cumulative dispersed fringe pattern (LSR-DSF) with a deep CNN to achieve integrated coarse-to-fine piston error detection in segmented mirrors, maintaining the root mean square error within 10.2 nm over a range of ±139λ [
23]. Neural networks offer high accuracy for piston error detection from single-frame images, but they require significant time for network training in the initial stages.
In this study, a pre-trained ResNet-18 network model was transferred to an optical system to learn the mapping relationship between far-field images and piston errors. The trained network can accurately predict the piston error between two segmented mirrors within 10 milliseconds, significantly improving the detection speed compared to traditional methods. Simulation verified the high accuracy and robustness of this approach and demonstrated its applicability in complex optical systems. Compared to previous detection methods that rely on complex system architectures and extensive data processing, the ResNet-18-based detection strategy proposed in this study greatly simplifies the error detection process, reduces system complexity, and provides a novel and efficient solution for future co-phasing error detection in segmented mirror systems.
2. Basic Principle
2.1. Mathematical Model
The core principle of convolutional neural networks (CNNs) in regression prediction tasks lies in their automated process of feature extraction, mapping, and optimization, which transforms key information from input diffraction images into continuous output variables. Specifically, CNNs first extract spatial features from images through a series of convolutional and pooling layers, encoding information closely related to the prediction target. These high-level features are then mapped to the output space via fully connected layers to generate the corresponding predicted values. After training, CNNs can directly predict the corresponding continuous variables from new input diffraction images using the learned features. The prediction accuracy is closely related to the sensitivity of the diffraction images to piston errors; the higher the sensitivity of the images to piston errors, the higher the prediction accuracy of the network. This study uses a two-segment mirror system as an example to construct the corresponding diffraction image and its labeled dataset, providing foundational data for training and testing deep learning models.
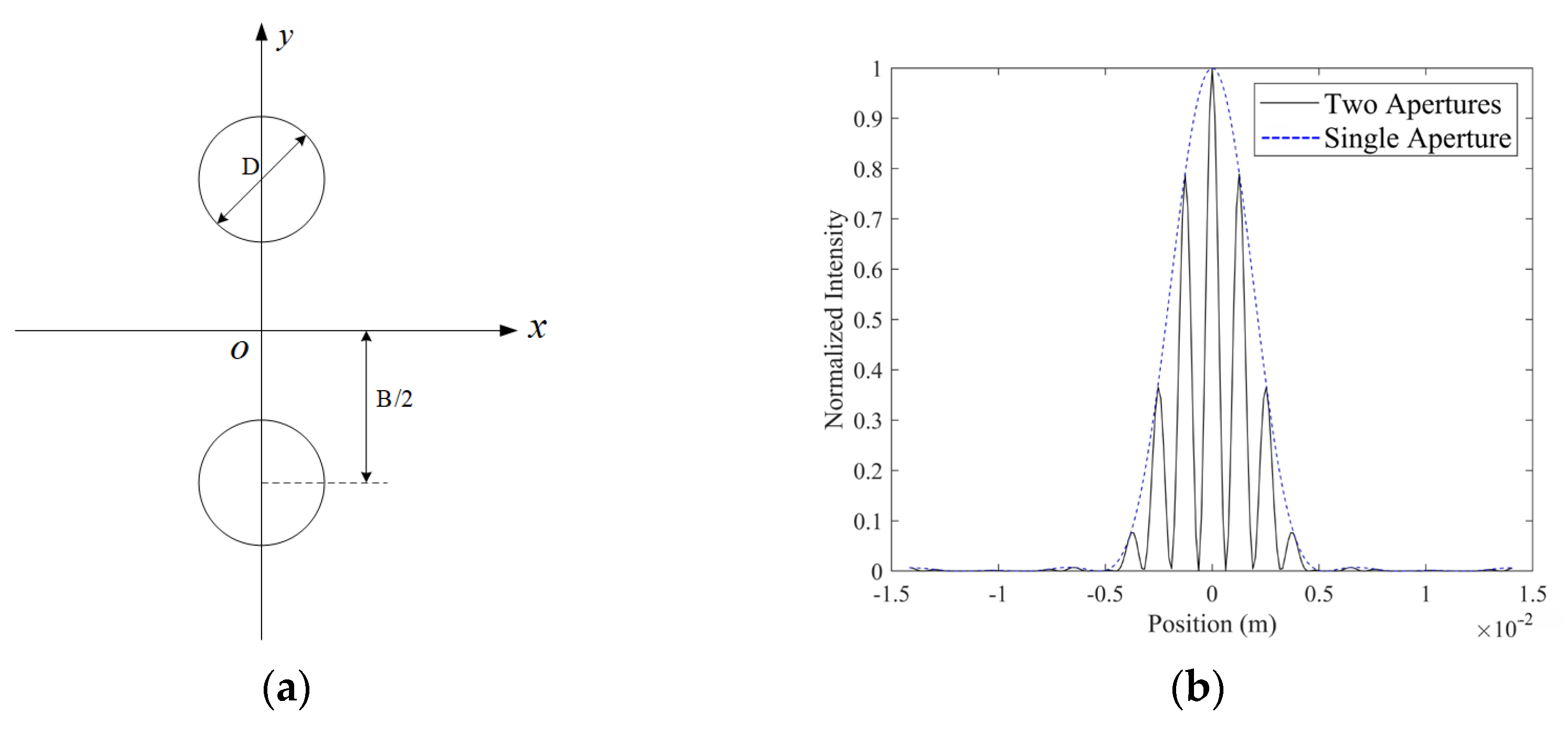
As shown in
Figure 1, based on the principle of Fraunhofer diffraction through a circular aperture, a mask is placed at the exit pupil plane of two segmented mirrors. Parallel monochromatic light, after reflecting off the segmented mirrors, passes through the circular aperture and is coherently imaged onto the detector surface of a camera through a focusing lens. In this configuration, there is a strict one-to-one correspondence between the piston error of the two segmented mirrors and the diffraction intensity pattern on the camera’s detector surface. This arrangement ensures that changes in the diffraction image directly reflect the piston error of the segmented mirrors, providing a clear and explicit physical basis for error detection.
Assuming the diameter of the circular aperture is
D and the coordinates of the center are
and
, the pupil function of the aperture in the pupil plane is given by
The phases of the circular apertures are denoted as
and
, respectively, and the generalized pupil function at the exit pupil plane is given by
The phase difference between the two circular apertures is denoted as
:
where
λ represents the wavelength of the incident light wave, and OPD denotes the axial optical path difference between the two segmented mirrors, which corresponds to the piston error in this context.
According to the imaging principles of the optical system, the intensity point spread function (PSF) of the system is given by
where
f represents the focal length of the lens, and
denotes the Fourier transform operator.
The light intensity
I on the detector surface of the camera can be expressed as
where
represents the ideal distribution of the point source, which is 1 in this case,
represents the convolution operation, and
denotes the noise introduced by the camera.
From Equation (4), it can be seen that double-aperture diffraction results from the combined effects of single-aperture diffraction and interference. The normalized PSF of a single aperture and two apertures is shown in
Figure 2. The single-aperture diffraction factor is related to the properties of the aperture itself, while the double-aperture interference term arises from the periodic arrangement of the apertures and is independent of the properties of the individual apertures.
2.2. Dataset Generation
To validate the feasibility of the neural network-based method for co-phasing piston error detection, a dataset needs to be constructed to establish the mapping relationship between diffraction images and piston errors. During the simulation phase, the optical imaging system is modeled in MATLAB based on the principles of Fourier optics, introducing co-phasing errors to generate a series of intensity diffraction images. The parameters were chosen based on the configuration of the JWST system, the diameter of the circular aperture,
D = 0.15 m, the distance between the two circular apertures,
B = 1.4 m, the focal length of the lens,
f = 20 m, and the incident light wavelength,
λ = 632.8 nm.
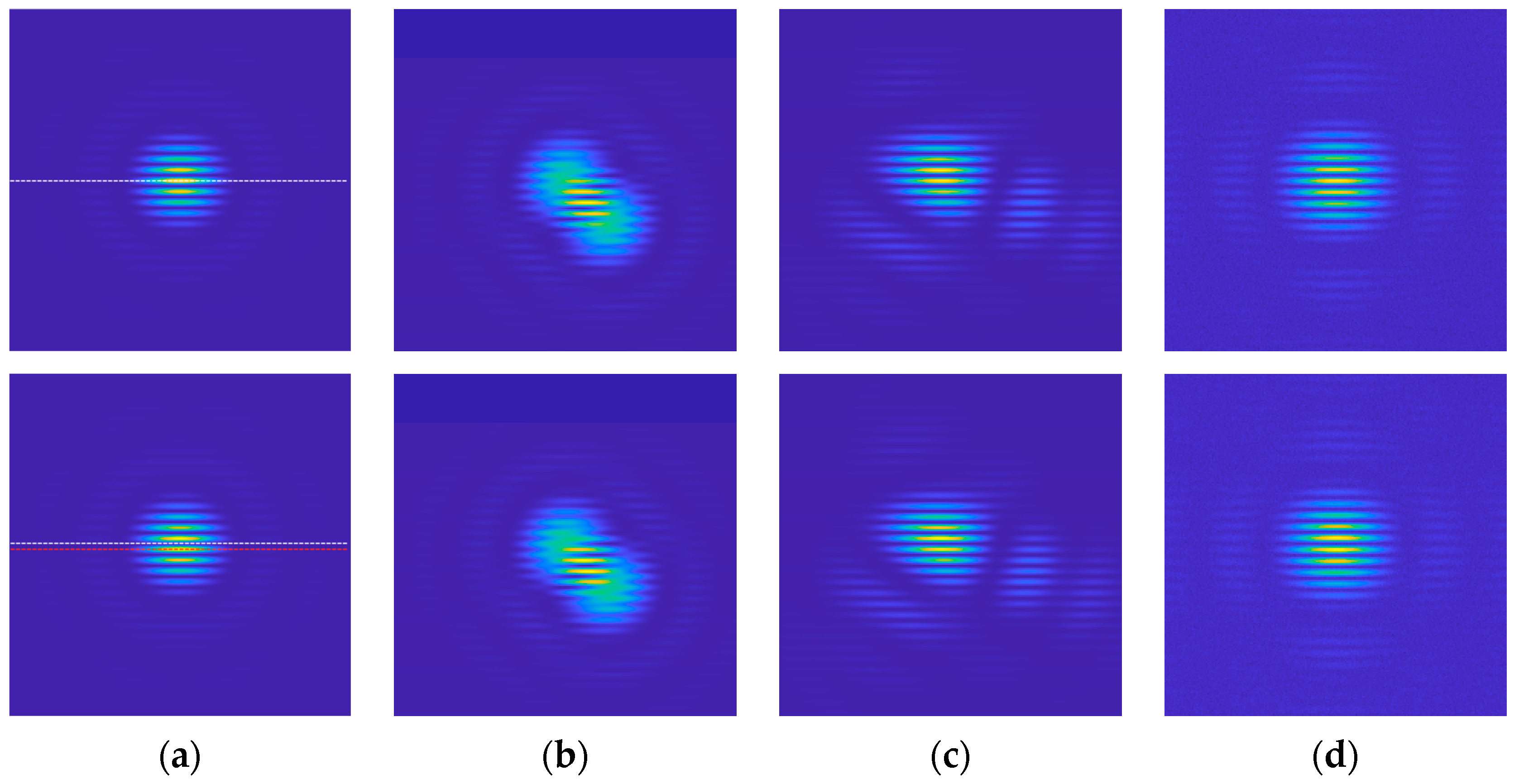
Figure 3 shows the intensity diffraction images obtained under four conditions: (1) with piston error only, (2) with tip-tilt error, (3) with Zernike aberrations of the 4th to 11th order, and (4) with noise. It is observed that as the piston error varies, the position of the diffraction spot maxima shifts, as shown in
Figure 3a. Specifically, when the piston error is 0, the intensity maximum aligns with the white dashed line, and as the piston error increases to 0.35
λ, the intensity maximum moves to the red dashed line. This shift demonstrates the one-to-one correspondence between the diffraction pattern and the piston error. A dataset is then constructed based on the mapping relationship between image intensity and piston error, allowing the neural network to learn the correspondence between them.
2.3. Neural Network Model
Convolutional neural networks (CNNs) are a class of deep learning models particularly well-suited for processing data with a grid-like structure, such as images. CNNs can automatically extract spatial features from images by incorporating convolutional layers, pooling layers, and fully connected layers. Convolutional layers perform local perception operations on input data using convolutional kernels, gradually extracting features at different levels; pooling layers reduce the dimensionality of the data through downsampling while retaining essential information; fully connected layers use the extracted features for final classification or regression tasks. Deeper network architectures can extract more complex image features, but they also require longer training time and higher-performance computing resources.
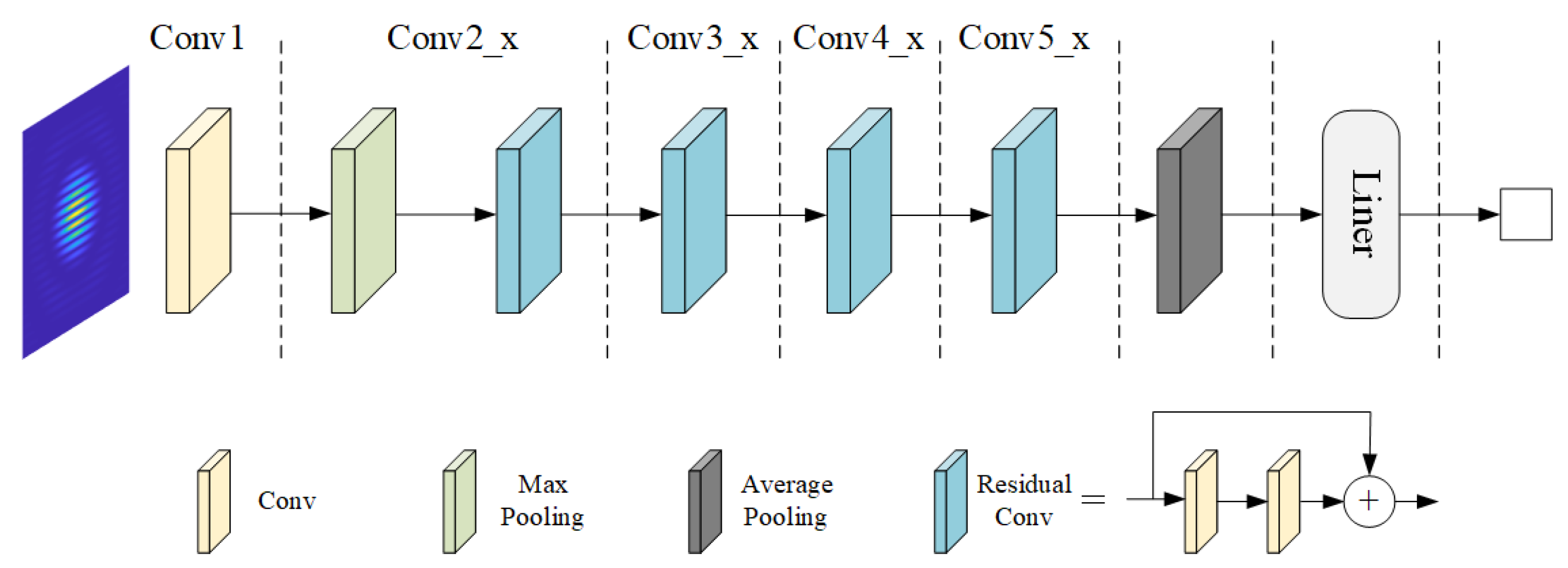
Based on multiple experiments, this study selected ResNet-18 as the foundational architecture of the network. This choice was made to balance performance and computational efficiency, as ResNet-18 can maintain accuracy while reducing training time and computational resource requirements. Multiple attempts were made to modify the network structure and associated hyperparameters based on ResNet-18, ultimately determining the optimized network architecture shown in
Figure 4. Through these adjustments, the network demonstrated excellent performance in image feature extraction and piston error detection tasks.
The network primarily consists of four parts: convolutional layers, pooling layers, residual modules, and fully connected layers. The input to the network is a single-channel grayscale diffraction image of size 224 × 224. It first passes through a convolutional layer with a 7 × 7 kernel, reducing the image size to 112 × 112. This is followed by a pooling operation with a 3 × 3 pooling kernel, further reducing the image dimensions to 56 × 56. The network includes four residual modules, each composed of two residual blocks, and each residual block contains two convolutional layers. Through successive feature extraction, the image size is reduced to 14 × 14 with 16 convolutional kernels, while the number of output channels increases to 512. Next, the network performs global average pooling, transforming the output into a 1 × 1 × 512 tensor. Finally, a fully connected layer produces the regression prediction result. Since the piston error is a single scalar value, the output of the fully connected layer is set to 1 × 1. This structural design fully leverages the feature extraction capabilities of convolutional neural networks while preserving the feature propagation ability of deep networks through residual modules, providing a solid foundation for accurate piston error prediction.
We incorporated L2 regularization into the network to prevent overfitting during training. By adding a penalty term to the original loss function, this approach is formulated as follows:
where
represents the weight matrix of the model,
is the total loss function after adding the regularization term,
is the original loss function, which is Mean Squared Error (MSE) loss in our regression task,
is the hyperparameter for regularization strength that determines the influence of the regularization term, and
denotes the squared L2 norm of the weight matrix
.
2.4. Network Training
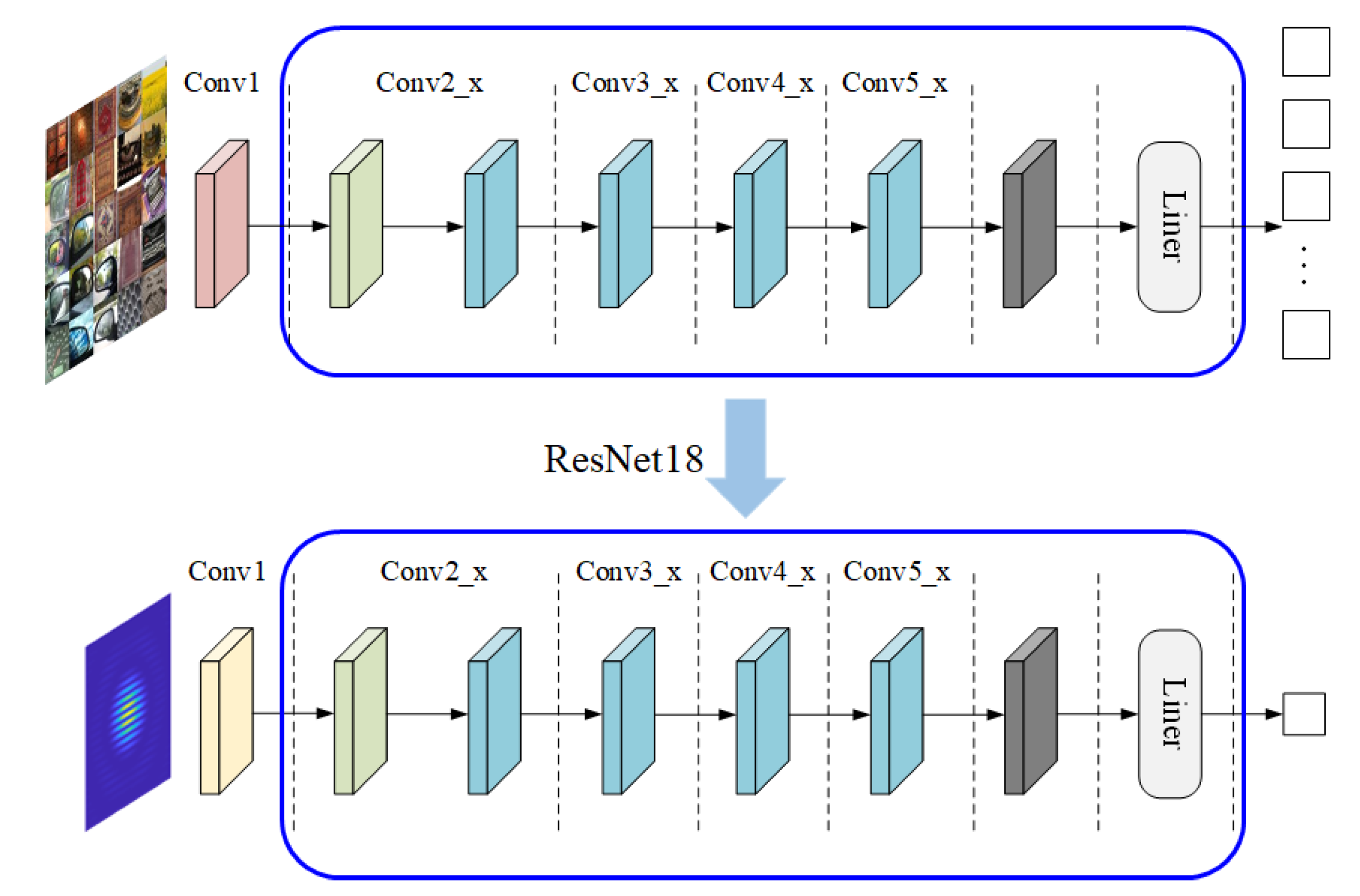
The ResNet-18 pre-trained model was trained on the ImageNet dataset, which contains tens of millions of images. In this study, while retaining the pre-trained parameters of the residual modules and pooling layers, the modified parts of the network, including the weights of the first convolutional layer and the weights and biases of the fully connected layer, were retrained, as shown in
Figure 5. During training, we introduced the Kaiming initialization method to prevent vanishing or exploding gradients, which are common issues in deep networks using ReLU activation functions. This strategy helps ensure stable training and enhances the model’s ability to optimize key parameters for the specific task. By combining this approach with the pre-trained model’s feature extraction capabilities, we aim to improve the prediction accuracy and stability of the network.
The core idea of Kaiming initialization is to ensure that the variance of the input and output remains consistent across each layer. For networks using the ReLU activation function, the weights
should satisfy the following condition:
where
represents the elements of the weight matrix,
denotes a normal distribution with a mean of 0 and a variance of
, and
n is the number of neurons in the previous layer. This initialization method is based on the characteristics of the ReLU activation function, where the output is the non-negative part of the input, and zeros out half of the input (the part where the input is less than zero). Therefore, a factor of 2 is multiplied to compensate for the attenuation of the signal.
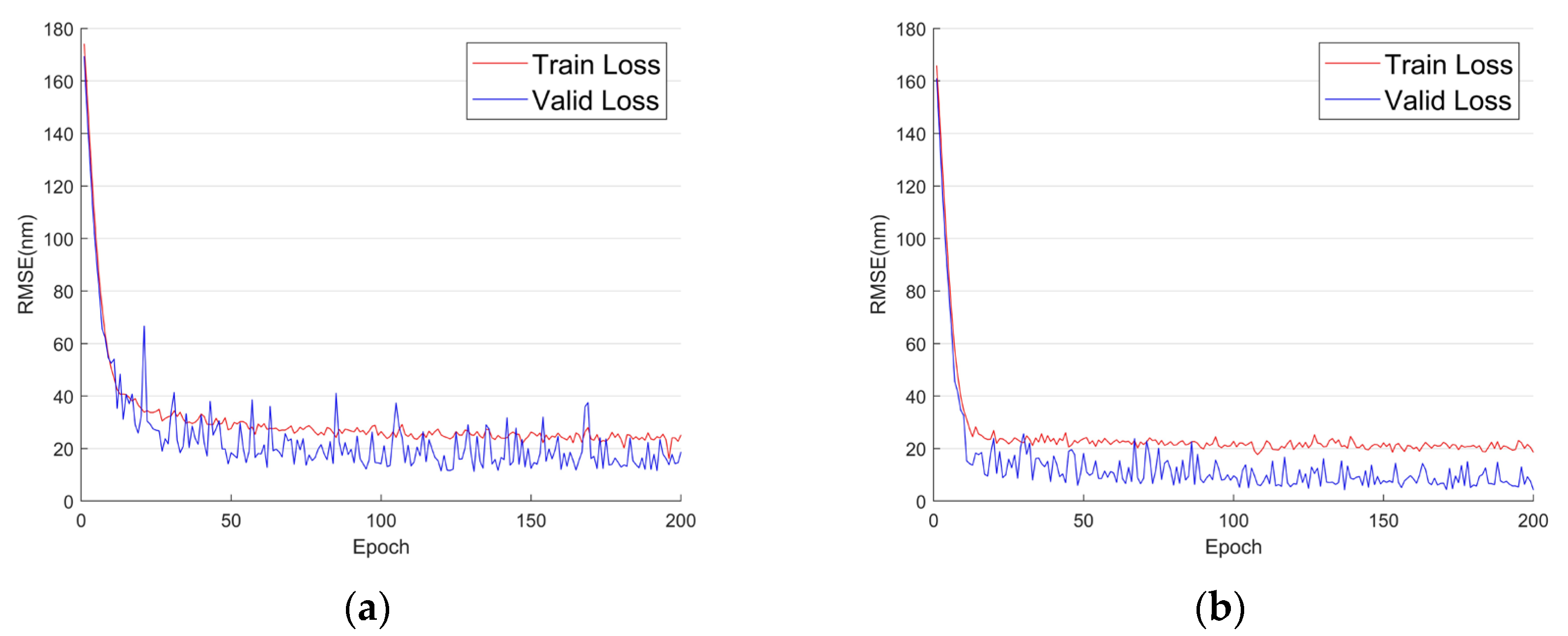
During training, the following hyperparameters were set: a batch size of 64, a learning rate of 0.001, and an L2 regularization coefficient of 0.001. The optimizer used was the Adam algorithm. The input images were 224 × 224 single-channel grayscale images. The hardware platform used for training included an Intel (R) Core (TM) i7-13700H CPU and an NVIDIA GeForce RTX 3050 GPU, with a software environment of Python version 3.11.5 and PyTorch version 2.1.2. Considering only the piston error, 10,000 diffraction images were randomly generated within the ranges of [−0.5
λ, 0.5
λ] and [−0.48
λ, 0.48
λ], with 8000 images used for training and 2000 for validation. The network was trained for 200 epochs, and the root mean square error (RMSE) during the training process is shown in
Figure 6.
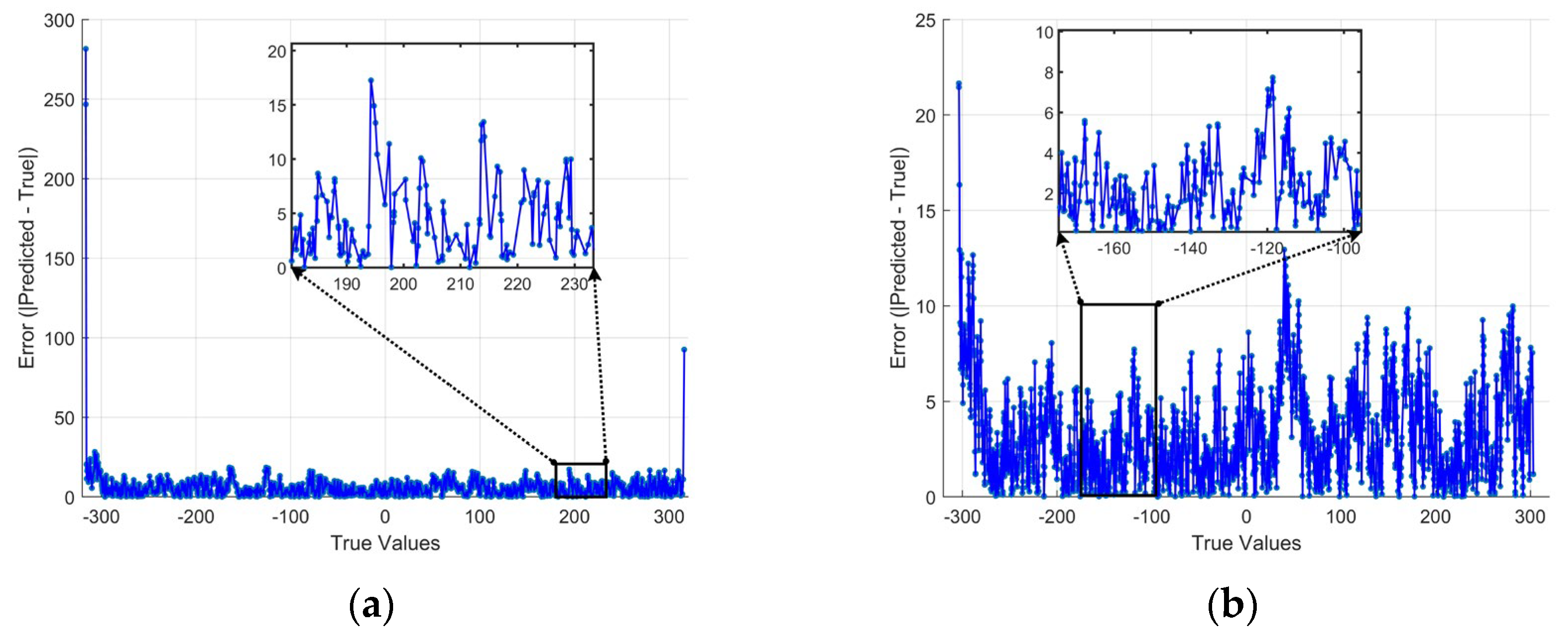
The performance of the trained model on the validation set was evaluated and compared in
Figure 7. When the piston error was within the interval [−0.5
λ, 0.5
λ], the model achieved a minimum root mean square error (RMSE) of 11.2 nm (0.0177
λ). Within this range, the prediction results for the piston error of 2000 diffraction images showed that the absolute error between the predicted and true values was primarily within 15 nm. When the piston error was within a smaller interval [−0.48
λ, 0.48
λ], the RMSE further decreased to 4.2 nm (0.0066
λ). In this case, the absolute error between the predicted and true values for 2000 diffraction images was mostly within 5 nm. Notably, the anomalies observed near the edges of the larger interval were not caused by the dataset [
24]. When the detection range was reduced to [−0.48
λ, 0.48
λ], the network maintained a high level of detection accuracy. Further narrowing of the range did not yield significant improvements in accuracy. Therefore, in this study, the subsequent piston error detection was consistently performed within the [−0.48
λ, 0.48
λ] interval to ensure high precision.
4. Discussion
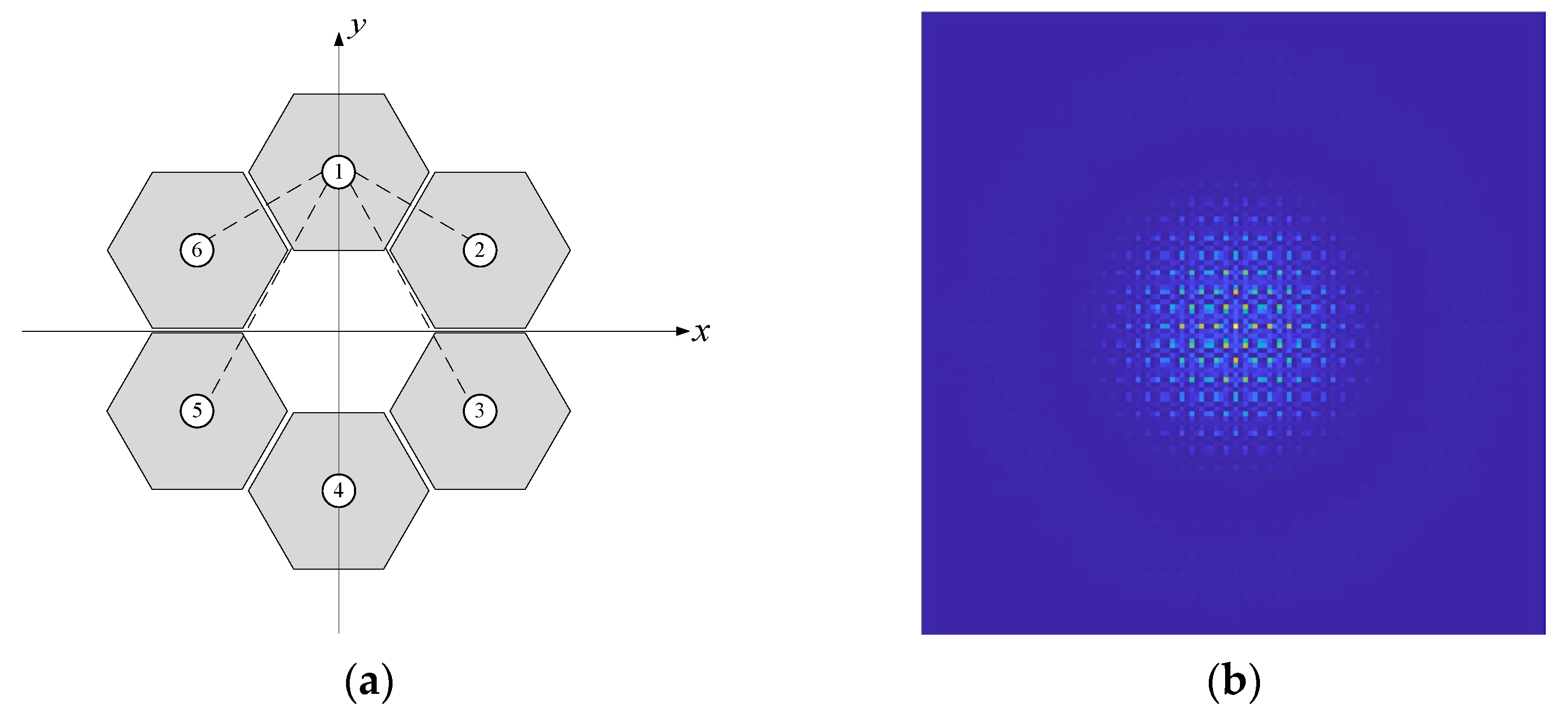
This section explores the application of a co-phase error detection method, based on far-field information and transfer learning, within multi-segment mirror systems. Using a six-segment imaging system as an example, the primary mirror structure and corresponding far-field diffraction pattern are shown in
Figure 12. In this setup, Segment 1 is designated as the reference mirror, while the remaining five segments serve as test mirrors. System parameters are configured as follows: aperture diameter,
D = 0.3 m, incident wavelength,
λ = 632.8 nm, the focal length of the lens,
f = 20 m, and the center coordinates (in meters) of the six mirror segments are (0, 1.32), (1.37, 0.61), (1.37, −0.61), (0, −1.32), (−1.37, −0.61), and (−1.37, 0.61). The corresponding far-field diffraction pattern is illustrated in
Figure 12b.
Applying distinct piston values to the five test mirrors generates the respective far-field images. After constructing the dataset, model training is conducted using transfer learning. Notably, as there are five test mirrors, the neural network’s final output must be adjusted to accommodate five piston error values. In theory, the trained neural network should accurately predict the piston errors of the five test mirrors simultaneously. In our upcoming research, we will further assess the robustness of the proposed method within multi-segment mirror systems. Additionally, when scaling to systems with more mirror segments, several challenges are anticipated. First, the increase in segment count will require a significantly larger dataset to account for a higher-dimensional error space, which may introduce added complexity to both the data collection and model training processes. Furthermore, as the segment count rises, maintaining prediction accuracy across all segments might become more challenging, potentially necessitating enhanced model architectures or more sophisticated error correction algorithms. In this regard, we hypothesize the potential of exploring adaptive neural network structures and advanced transfer learning techniques to optimize the applicability and predictive performance of the method in higher-dimensional mirror configurations.
5. Conclusions
This study proposes a method for high-precision co-phasing detection of segmented mirrors using far-field information and transfer learning, based on the principle of double-aperture Fraunhofer diffraction. By modeling the optical system of the two submirrors, the impact of co-phasing errors on the performance of segmented mirrors was analyzed in detail, and a corresponding dataset was constructed within the range of [−0.48λ, 0.48λ]. The traditional neural network ResNet-18 was optimized using a transfer learning strategy, retaining some of its pre-trained parameters and retraining it on the constructed dataset. The trained network model demonstrated excellent detection accuracy, achieving 0.0066λ. Furthermore, the robustness of the convolutional neural network in co-phasing detection was validated through simulations under various error conditions. The results show that the method has good generalization capability, maintaining high detection accuracy even under different types and magnitudes of errors.
Compared to traditional optical methods, the co-phasing detection method based on far-field information and neural networks offers significant advantages. Firstly, this approach simplifies the measurement process and reduces data processing time, as the network can achieve high-precision detection of co-phasing errors in segmented mirrors using only a single frame of a far-field diffraction image. Secondly, neural networks exhibit strong robustness and adaptability, effectively predicting co-phasing errors even when processing noisy data in complex environments. Moreover, compared to other deep learning-based methods for piston error detection, this study introduces a transfer learning strategy, which ensures high accuracy while avoiding the complexity of building a neural network from scratch, thereby enhancing the method’s practicality and efficiency in real-world applications. The application of this proposed method to multi-segment mirror systems will be further explored in our subsequent research.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}