Research on 2D Image Motion Compensation for a Wide-Field Scanning Imaging System with Moving Base

Abstract
:1. Introduction
- A multilevel 2D IMC method is proposed in this paper. The coarse and fine 2D IMC are achieved through a 2D scanning platform and 2D FSM. Distinct from the traditional 1D IMC method which adopts a discrete compensation mechanism for each dimension, in this paper, the compensation of 2D image motion is set in one compensation mechanism and placed in the secondary mirror position. The 2D IMC mechanism is more compact, more efficient and more accurate.
- In order to achieve accurate compensation of 2D image motion, the 2D compensating motion of the secondary mirror in the process of dynamic compensation must be exactly consistent with the 2D image motion in direction and magnitude. In practice, consistency is hard to guarantee, so it is not possible to simply add FSM compensation motion and scanning motion up to determine a synthetic image motion. Additionally, as opposed to 1D IMC, 2D IMC is difficult and has orthogonal errors. In view of this, the coupling relationship between the image motion and compensating motion is derived and analyzed with the image coordinate system as the medium, and a complete 2D IMC model is established from the coupling relationship.
- Based on the complete system model, a 2D IMC method with ODCR is designed to achieve high-precision 2D IMC. Then, the coupling relationship is calibrated. Additionally, experiments are carried out both in laboratory and flight tests to verify the efficiency and accuracy of the 2D IMC method.
2. System Components and Operating Principle
3. Multilevel 2D IMC Model
3.1. Analysis of the Optical Coupling in the 2D Compensation
3.2. Modeling
4. A Multilevel 2D IMC Method
4.1. Control of the Coarse Loop
4.2. Control of the Fine Loop
- General fine FSM control
- b.
- Fine control with ODCR
5. Experiments
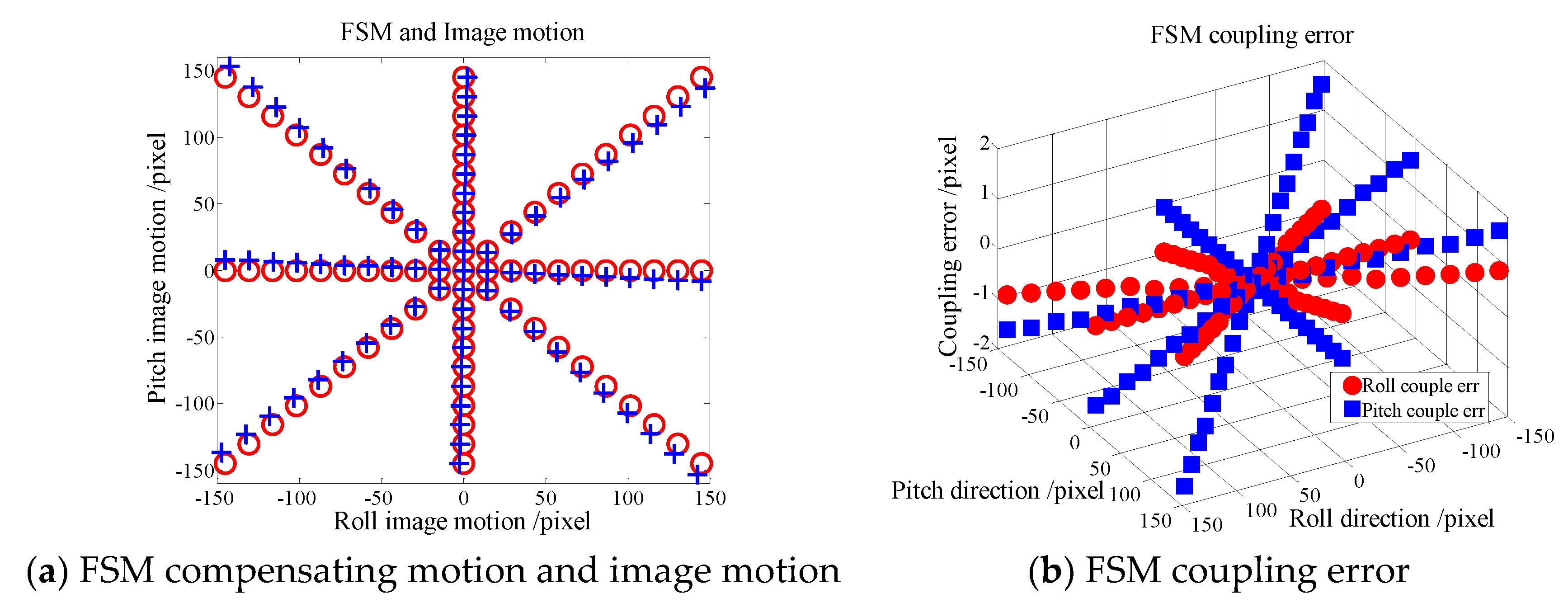
5.1. Calibration Tests on Optical Coupling
- (a)
- Calibration of the FSM driving axes and the imaging coordinate system
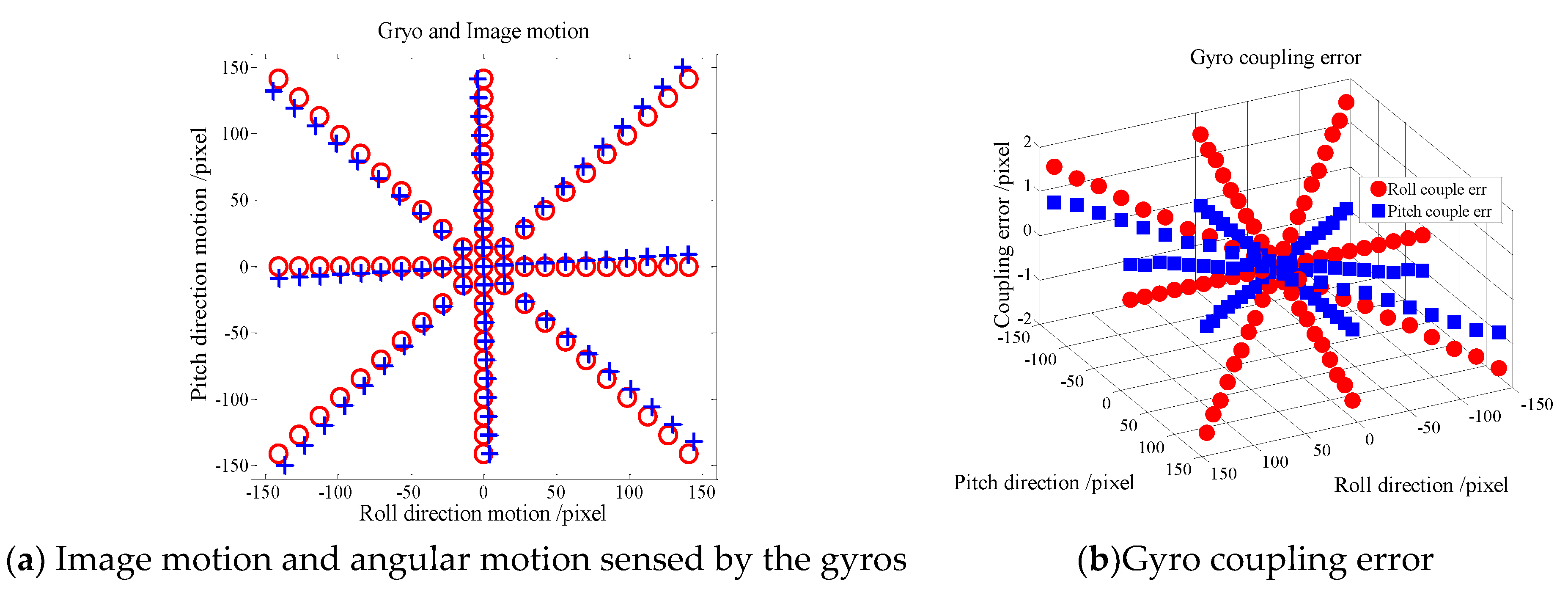
- (b)
- Calibration of the direction of gyro axes and the imaging system
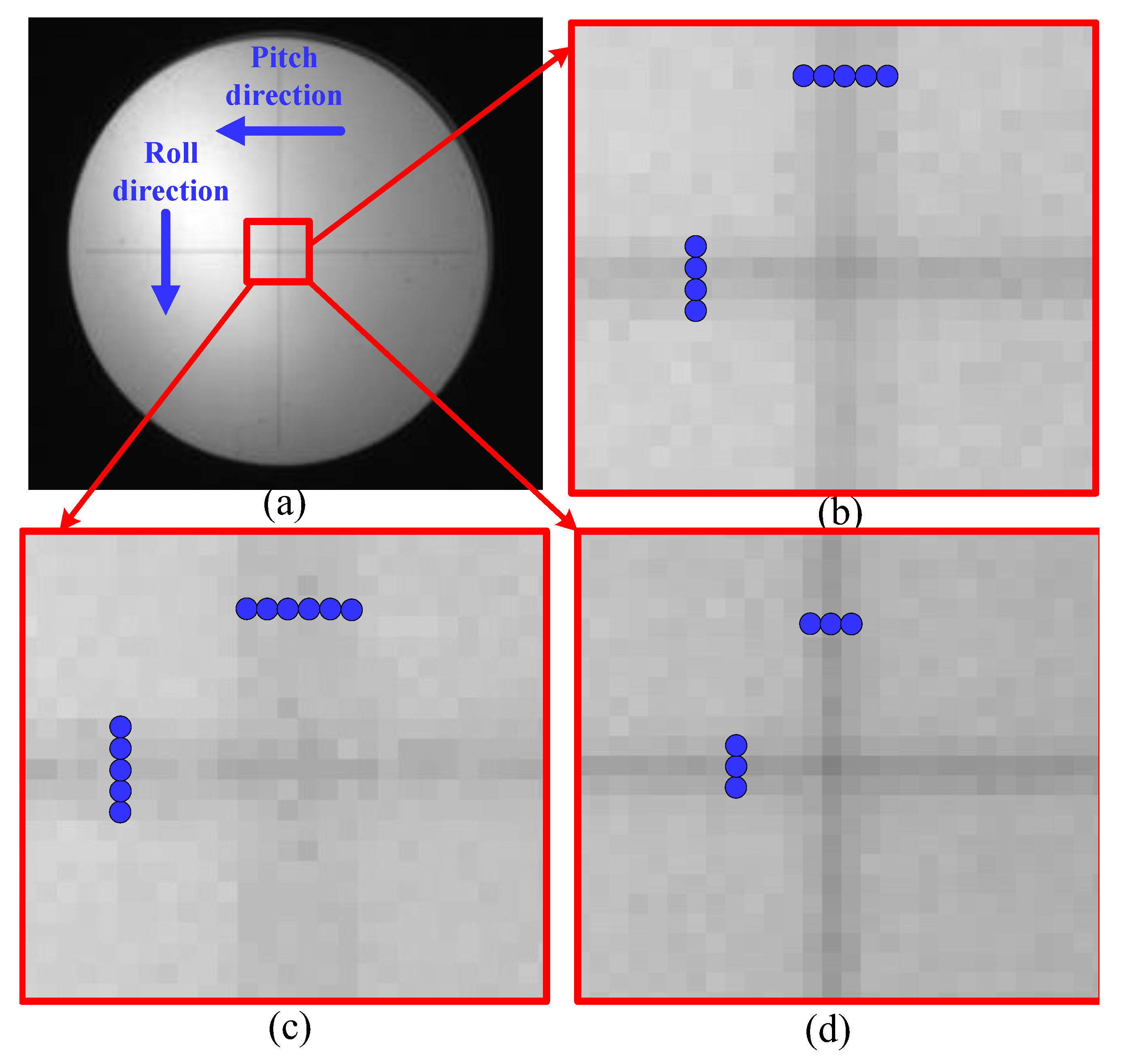
5.2. Tests on the 2D IMC in the Laboratory
- (a)
- The rolling speed of the 2D scanning platform is set at +60°/s, with stable inertia in the pitch direction. A 1D IMC test is conducted by simulating the scanning image motion of an actual flight, without adopting the ODCR.
- (b)
- The rolling speed of the 2D scanning platform is set at +60°/s, with a pitch scanning speed of 5°/s. A 2D IMC test is conducted by simulating the scanning image motion and forward image motion of an actual flight, without adopting the ODCR.
- (c)
- The rolling speed of the 2D scanning platform is set at +60°/s, with a pitch scanning speed of 5°/s. A 2D IMC test is conducted by simulating the scanning image motion and forward image motion of an actual flight. This time, the 2D IMC test is carried out by adopting ODCR. The results are shown in Figure 12.
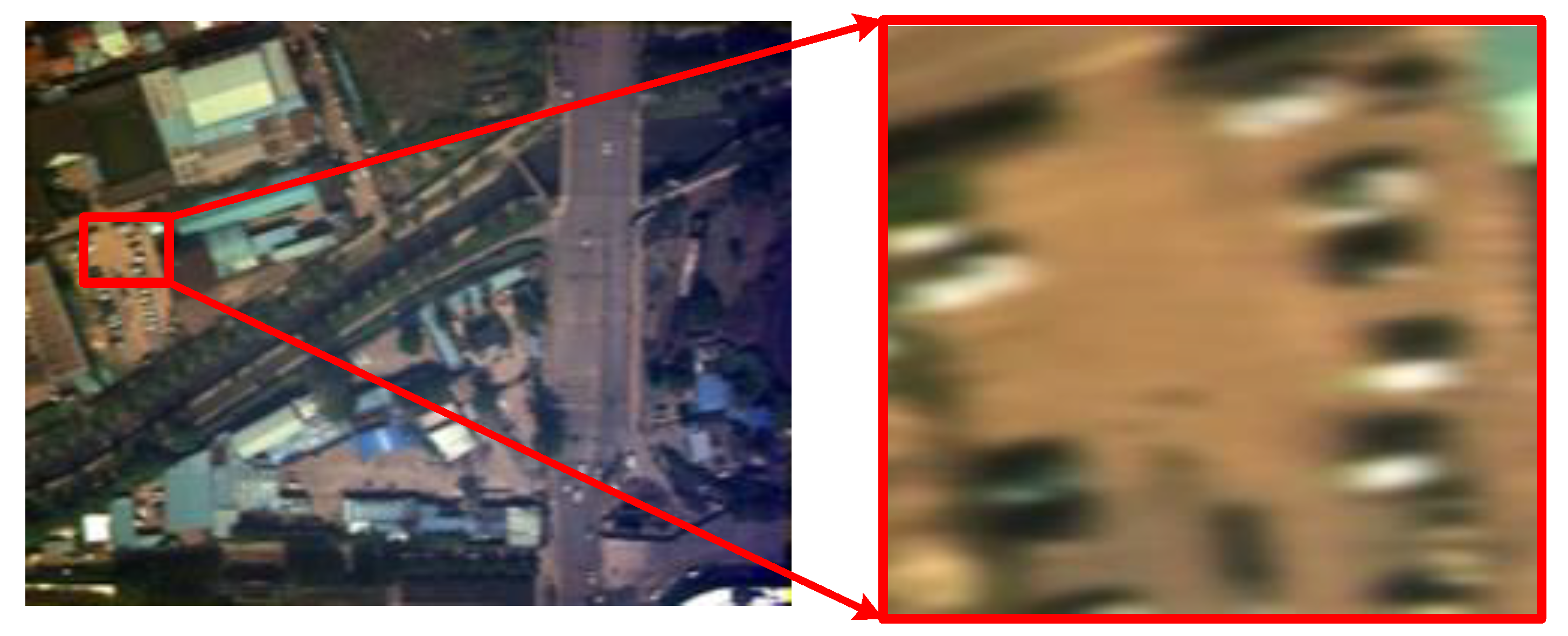
5.3. Flight Test
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, J.; Schonfeld, D.; Mohamed, M. Robust video stabilization based on particle filter tracking of projected camera motion. IEEE Trans. Circuits Syst. Video Technol. 2009, 19, 945–954. [Google Scholar] [CrossRef]
- Sweeney, M.N.; Erdelyi, E.; Ketabchi, M.; Kent, B. Design considerations for optical pointing and scanning mechanisms. Proc. SPIE Optomech. 2003, 5176, 135–146. [Google Scholar]
- Gorin, B.A. Side oblique real-time orthophotography with the 9Kx9K digital framing camera. In Proceedings of the Society of Photo-Optical Instrumentation Engineers Conference on Airborne Reconnaissance, Orlando, FL, USA, 8 August 2003. [Google Scholar]
- Benzarti, F.; Amiri, H. Repairing and Inpainting Damaged Images using Diffusion Tensor. arXiv 2013, arXiv:1305.2221. [Google Scholar]
- Pratlong, J.A.; Jerrama, P.; Tsiolisa, G. TDI-CMOS Image Sensor for Earth Observation. Sens. Syst. Next-Gener. Satell. 2018. [Google Scholar] [CrossRef]
- Xu, J.; Shi, X.; Nie, K.; Gao, Z. A Global Shutter High Speed TDI CMOS Image Sensor with Pipelined Charge Transfer Pixel. IEEE Sens. J. 2018, 18, 2729–2736. [Google Scholar] [CrossRef]
- Zhang, J.; Ding, Y.; Zhang, L.; Tian, H.; Yuan, G. Precise alignment method of time-delayed integration charge-coupled device charge shifting direction in aerial panoramic camera. Opt. Eng. 2016, 55, 125101. [Google Scholar] [CrossRef]
- Wang, D.; Li, W.; Yao, Y.; Huang, H.; Wang, Y. A fine IMC method for the panoramic TDI CCD camera in remote sensing applications. Opt. Commun. 2013, 298–299, 79–82. [Google Scholar]
- Lv, T.; Ruan, P.; Jiang, K.; Jing, F. Modeling and analysis of fast steering mirror disturbance effects on the line of sight jitter for precision pointing and tracking system. Mech. Syst. Signal Process. 2023, 188, 110002. [Google Scholar] [CrossRef]
- Alvi, B.A.; Asif, M.; Siddiqui, F.A.; Safwan, M.; Bhatti, J.A. Fast Steering Mirror Control Using Embedded Self-Learning Fuzzy Controller for Free Space Optical Communication. Wirel. Pers. Commun. 2014, 76, 643–656. [Google Scholar] [CrossRef]
- Cho, M.; Corredor, A.; Dribusch, C.; Park, W.H.; Sheehan, M.; Johns, M.; Shectman, S.; Kern, J.; Hull, C.; Kim, Y.S. Performance prediction of the fast steering secondary mirror for the Giant Magellan Telescope. Proc. SPIE-Int. Soc. Opt. Eng. 2012, 8444, 24. [Google Scholar] [CrossRef]
- Hayakawa, T.; Watanabe, T.; Ishikawa, M. Real-time high-speed motion blur compensation system based on back-and-forth motion control of galvanometer mirror. Opt. Express 2015, 23, 31648–31661. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Yu, C.; Wang, Y.; Hua, N.; Kuang, H. Imaging attitude control and IMC residual analysis based on a three-axis inertially stabilized platform. Appl. Sci. 2021, 11, 5856. [Google Scholar] [CrossRef]
- Wang, L.; Liu, X.; Wang, C. Modeling and design of fast steering mirror in IMC for backscanning step and stare imaging systems. Opt. Eng. 2019, 58, 1. [Google Scholar]
- Xiu, J.; Huang, P.; Li, J.; Zhang, H.; Li, Y. Line of Sight and Image Motion Compensation for Step and Stare Imaging System. Appl. Sci. 2020, 10, 7119. [Google Scholar] [CrossRef]
- Yuquan, Z. Conceptual Design and IMC Rate Analysis of Two-Axis Fast Steering Mirror for Dynamic Scan and Stare Imaging System. Sensors 2021, 21, 6441. [Google Scholar]
- Chang, T.; Wang, Q.; Zhang, L.; Hao, N.; Dai, W. Battlefield dynamic scanning and staring imaging system based on fast steering mirror. J. Syst. Eng. Electron. 2019, 30, 37–56. [Google Scholar]
- Sun, C.S.; Ding, Y.L.; Wang, D.J.; Tian, D.P. Backscanning step and stare imaging system with high frame rate and wide coverage. Appl. Opt. 2015, 54, 4960–4965. [Google Scholar] [CrossRef]
- Held, K.J.; Robinson, B.H. TIER II Plus airborne EO sensor LOS control and image geolocation. IEEE Aerosp. Conf. 1997, 2, 377–405. [Google Scholar]
- Hilkert, J.M. Inertially stabilized platform technology. IEEE Control. Syst. Mag. 2008, 28, 26–46. [Google Scholar]
- Ahi, B.; Nobakhti, A. Hardware implementation of an ADRC controller on a gimbal mechanism. IEEE Trans. Control. Syst. Technol. 2018, 26, 2268–2275. [Google Scholar] [CrossRef]
- Csencsics, E.; Schlarp, J.; Schopf, T.; Schitter, G. Compact high performance hybrid reluctance actuated fast steering mirror system. Mechatronics 2019, 62, 102251. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, B.; Li, X.; Zhang, S. Study on application of model reference adaptive control in fast steering mirror system. Opt. -Int. J. Light Electron Opt. 2018, 172, 995–1002. [Google Scholar] [CrossRef]
- Hilkert, J.M.; Pautler, B. A reduced-order disturbance observer applied to inertially stabilized line-of-sight control. Proc. SPIE-Int. Soc. Opt. Eng. 2011, 8052, 12. [Google Scholar]
- Tian, D.; Xu, R.; Sariyildiz, E.; Gao, H. An Adaptive Switching-Gain Sliding-Mode-Assisted Disturbance Observer for High-Precision Servo Control. IEEE Trans. Ind. Electron. 2022, 69, 1762–1772. [Google Scholar] [CrossRef]
- Emre, S.; Oboe, R.; Ohnishi, K. Disturbance Observer-Based Robust Control and Its Applications: 35th Anniversary Overview. IEEE Trans. Ind. Electron. 2019, 99, 1. [Google Scholar]
- Ran, B.; Wen, L.; Zhu, L.; Yang, K.; Yang, P.; Du, R.; Wang, S.; Xu, B. Coupled dynamic reaction force study of a large-aperture piezoelectric fast steering mirror. Appl. Opt. 2021, 60, 3393–3402. [Google Scholar] [CrossRef] [PubMed]
- Chen, G.; Liu, P.; Ding, H. Structural parameter design method for a fast-steering mirror based on a closed-loop bandwidth. Front. Mech. Eng. 2020, 15, 11. [Google Scholar] [CrossRef]
- Yuan, D.; Ding, Y.; Yuan, G.; Li, F.; Zhang, L. Two-Step Calibration Method for Extrinsic Parameters of an Airborne Camera. Appl. Opt. 2021, 60, 1387–1398. [Google Scholar] [CrossRef]
- Li, J.; Liu, Z. Camera geometric calibration using dynamic single pixel illumination with deep learning networks. IEEE Trans. Circuits Syst. Video Technol. 2020, 30, 2550–2558. [Google Scholar] [CrossRef]
- Yin, L.; Wang, X.; Ni, Y.; Zhou, K.; Zhang, J. Extrinsic parameters calibration method of cameras with non-overlapping fields of view in airborne remote sensing. Remote Sens. 2018, 10, 1298. [Google Scholar] [CrossRef]
- Deng, L.; Lu, G.; Shao, Y.; Fei, M.; Hu, H. A novel camera calibration technique based on differential evolution particle swarm optimization algorithm. Neurocomputing 2016, 174, 456–465. [Google Scholar] [CrossRef]
- Djite, I.; Estribeau, M.; Magnan, P.; Rolland, G.; Petit, S.; Saint-Pe, O. Theoretical Models of Modulation Transfer Function, Quantum Efficiency, and Crosstalk for CCD and CMOS Image Sensors. IEEE Trans. Electron Devices 2012, 59, 729–737. [Google Scholar] [CrossRef]
- Bian, J.; Ma, D.M.; Sun, G.; Shao, J. MTF test technology analysis of infrared electro-optical imaging system. J. Appl. Opt. 2013, 34, 748–753. [Google Scholar]
- Masaoka, K.; Yamashita, T.; Nishida, Y.; Sugawara, M. Modified slanted-edge method and multidirectional modulation transfer function estimation. Opt. Express 2014, 22, 6040–6046. [Google Scholar] [CrossRef] [PubMed]
- Sun, C.; Qi, W.; Ding, Y.; Wang, D.; Meng, F.; Lei, Z. Modulation transfer function measurement of image motion of aerial camera based on slanted-edge method. Acta Opt. Sin. 2014, 34, 1212001. [Google Scholar]
- Fiete, R.D. Modeling the Imaging Chain of Digital Cameras; SPIE Press: Bellingham, WA, USA, 2010. [Google Scholar]
- Boreman, G.D. Modulation transfer function in optical and electro-optical systems. Russ. Chem. Rev. 2001, 71, 159–179. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Calibration Value | Unit |
|---|---|---|
| 0.003351032 | rad | |
| −0.003855432 | rad | |
| 0.006126106 | rad | |
| 0.005152212 | rad | |
| 0.51418 | / | |
| 451.2 | mm |
| Parameter | Calibration Value | Unit |
|---|---|---|
| 0.005097234 | rad | |
| 0.003822271 | rad | |
| −0.00757136 | rad | |
| 0.005096361 | rad |
| Compensation Precision. | 1D IMC | 2D IMC | 2D IMC with ODCR | |
|---|---|---|---|---|
| Direction of Image Motion | ||||
| in the roll direction | 0.236 | 0.236 | 0.236 | |
| in the pitch direction | 0.227 | 0.227 | 0.227 | |
| in the roll direction (RMS) | 0.226 | 0.21 | 0.235 | |
| in the pitch direction (RMS) | 0.204 | 0.185 | 0.226 | |
| in the roll direction (RMS) | 0.956 | 0.89 | 0.997 | |
| in the pitch direction (RMS) | 0.899 | 0.813 | 0.995 | |
| IMC error in the roll direction (RMS) | 1.65 | 2.62 | 0.46 | |
| IMC error in the pitch direction (RMS) | 2.51 | 3.47 | 0.57 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, S.; Chen, W.; Cao, J.; Mei, C.; Li, X.; Zhang, H. Research on 2D Image Motion Compensation for a Wide-Field Scanning Imaging System with Moving Base. Photonics 2023, 10, 1305. https://doi.org/10.3390/photonics10121305
Chang S, Chen W, Cao J, Mei C, Li X, Zhang H. Research on 2D Image Motion Compensation for a Wide-Field Scanning Imaging System with Moving Base. Photonics. 2023; 10(12):1305. https://doi.org/10.3390/photonics10121305
Chicago/Turabian StyleChang, Sansan, Weining Chen, Jianzhong Cao, Chao Mei, Xiang Li, and Hongwei Zhang. 2023. "Research on 2D Image Motion Compensation for a Wide-Field Scanning Imaging System with Moving Base" Photonics 10, no. 12: 1305. https://doi.org/10.3390/photonics10121305
APA StyleChang, S., Chen, W., Cao, J., Mei, C., Li, X., & Zhang, H. (2023). Research on 2D Image Motion Compensation for a Wide-Field Scanning Imaging System with Moving Base. Photonics, 10(12), 1305. https://doi.org/10.3390/photonics10121305