Control Strategy of a Rotating Power Flow Controller Based on an Improved Hybrid Particle Swarm Optimization Algorithm




Abstract
1. Introduction
2. Introduction to RPFCs
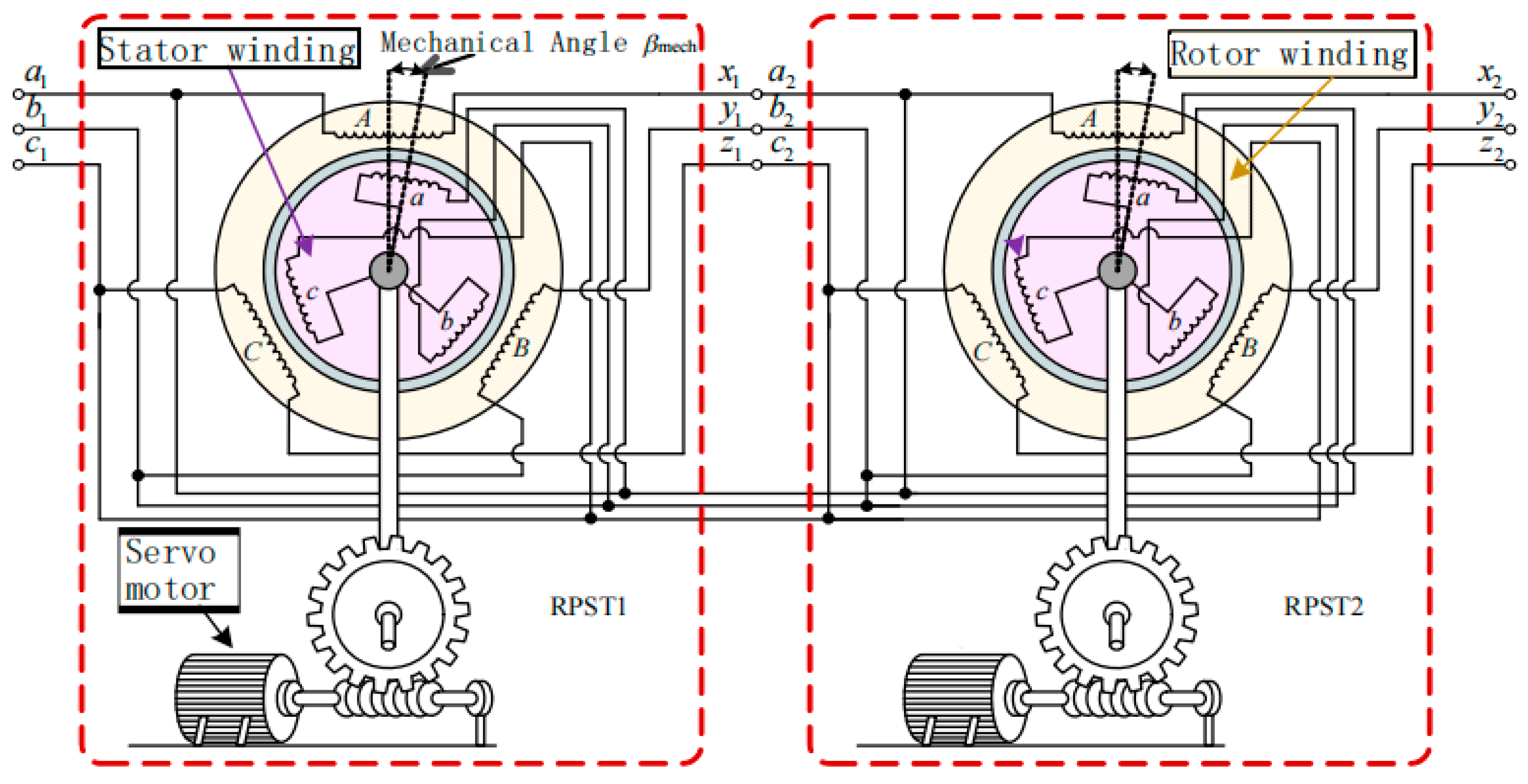
2.1. RPFC Topology [4]
2.2. Operating Principle of RPFC [19]
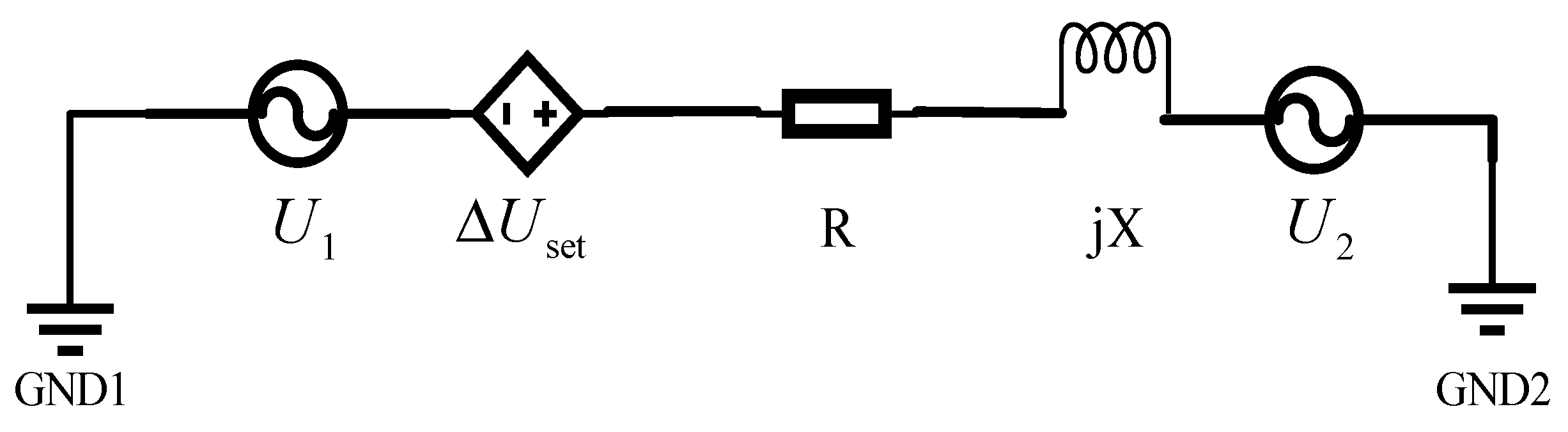
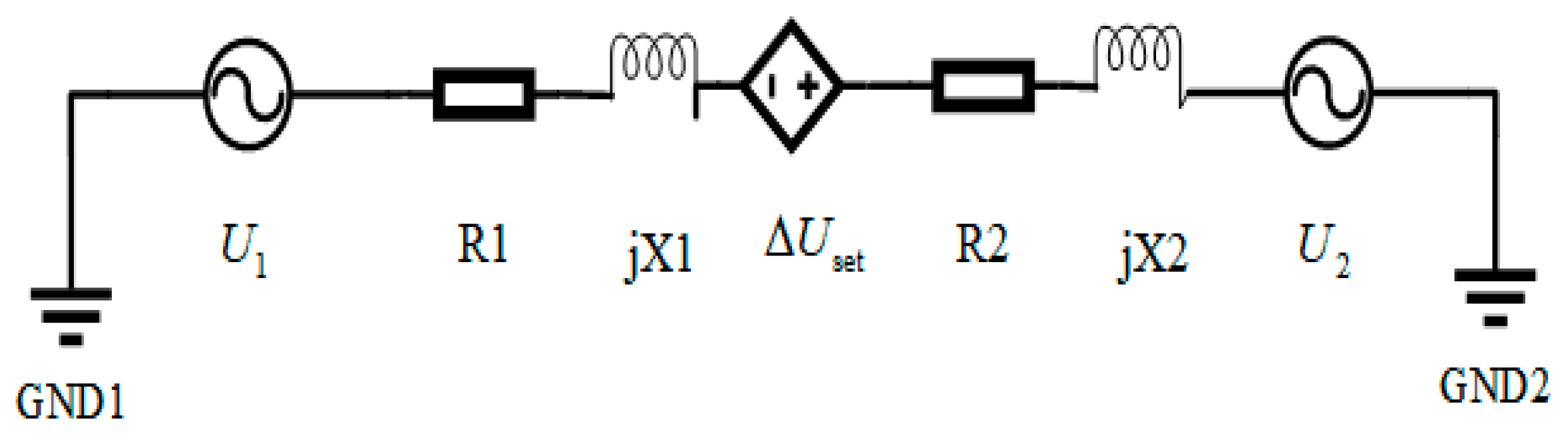
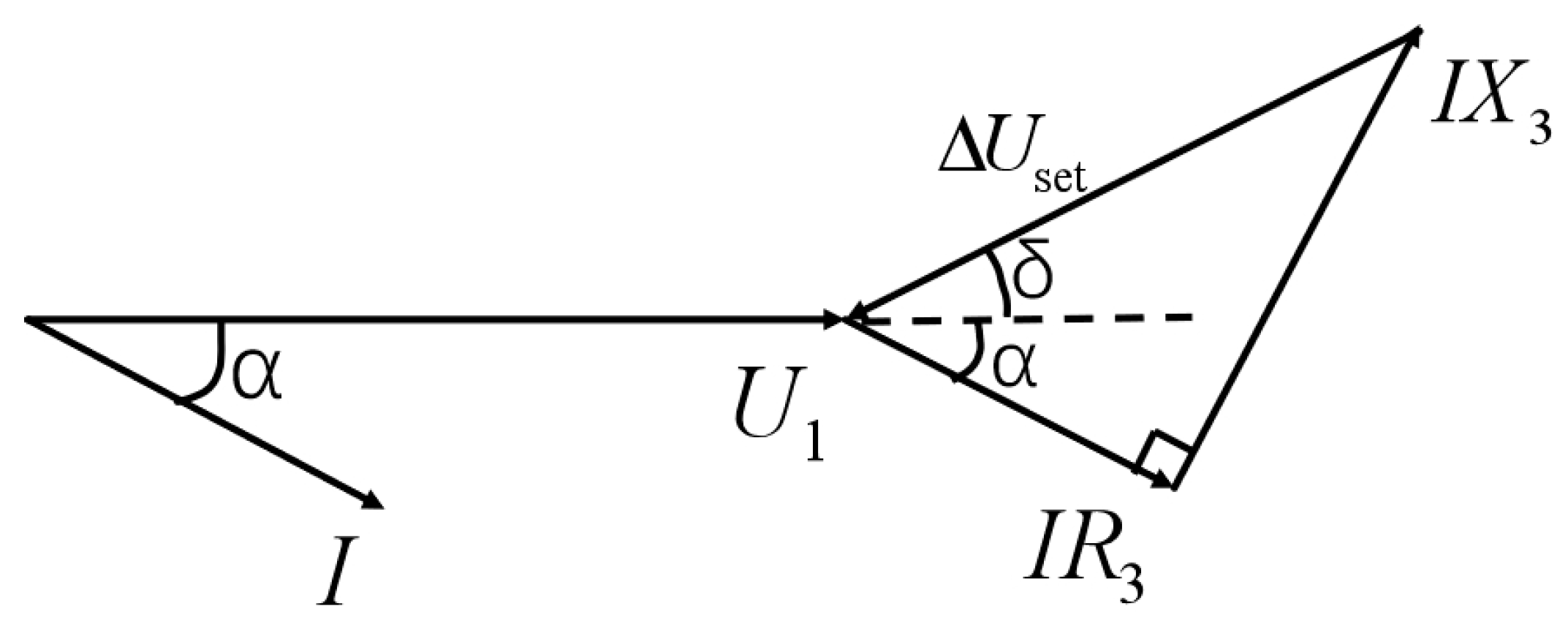
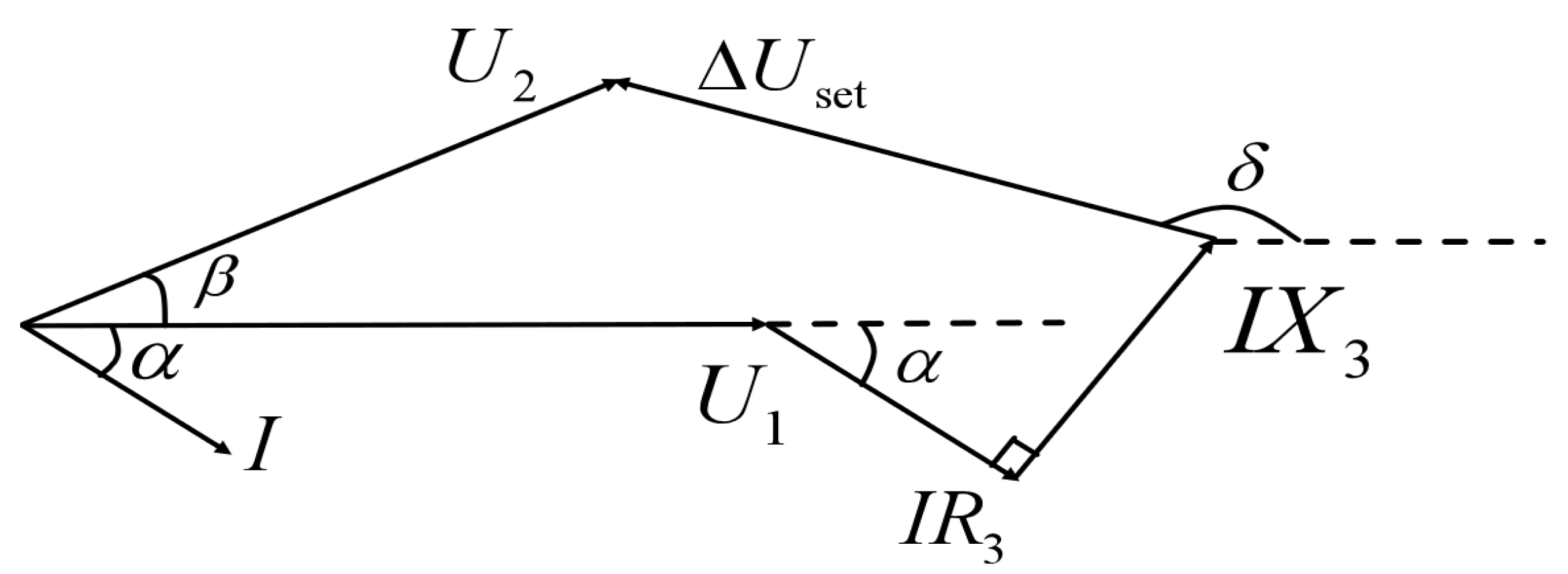
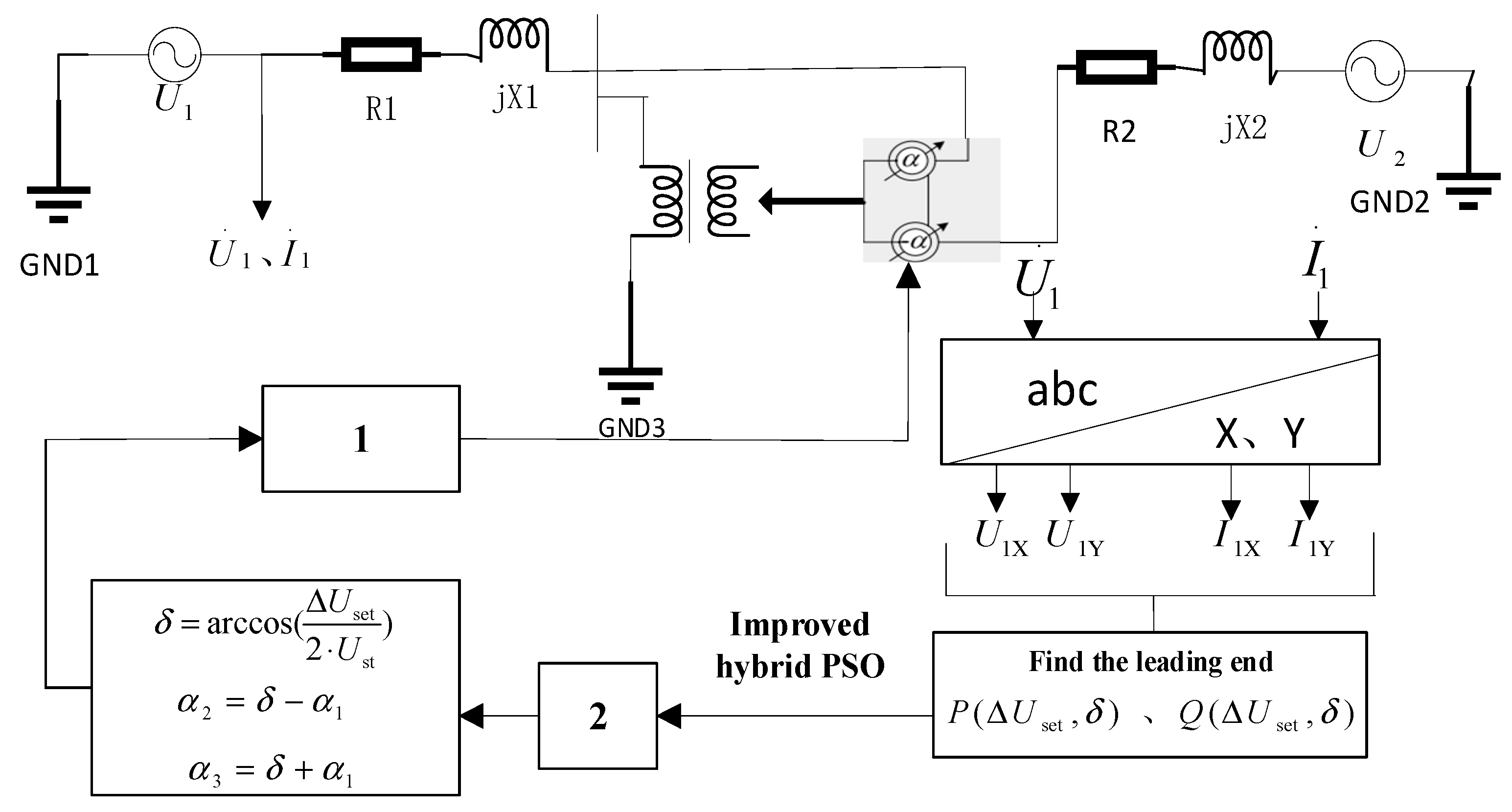
2.3. Establishment of the Model and Derivation of the Power Expression
- (1)
- (2)
3. Power Separate Control
3.1. Power Separate Control Strategy (Taking the Case Where the Phases of and Are Identical as an Example)
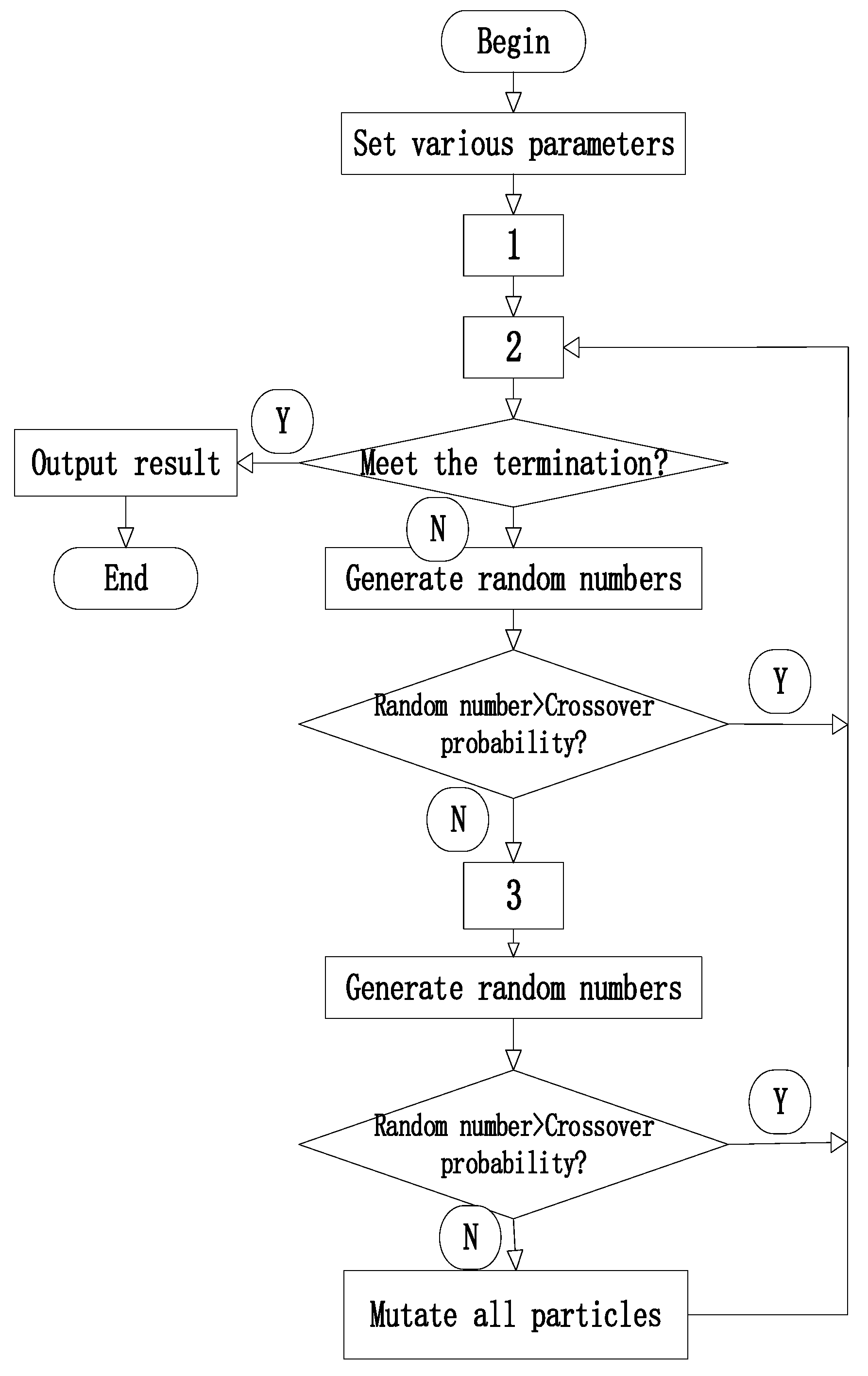
- The active and known values are divided into n (n > 10) paragraphs. The objective function is set to a constant reactive power, and the active power is adjusted in stages. Initialization of the particle population is carried out by logistic chaotic mapping.
- Each particle’s position, velocity, and fitness are calculated, and the global variables are updated.
- The parent particles are selected to cross with the set cross pool size, and the parent particles are replaced.
- Two phase shifters are executed to rotate the path.
- If P is adjusted, Q, the voltage amplitude, and the phase change path are unchanged; if Q and P are unchanged, the voltage amplitude and phase change path are adjusted.
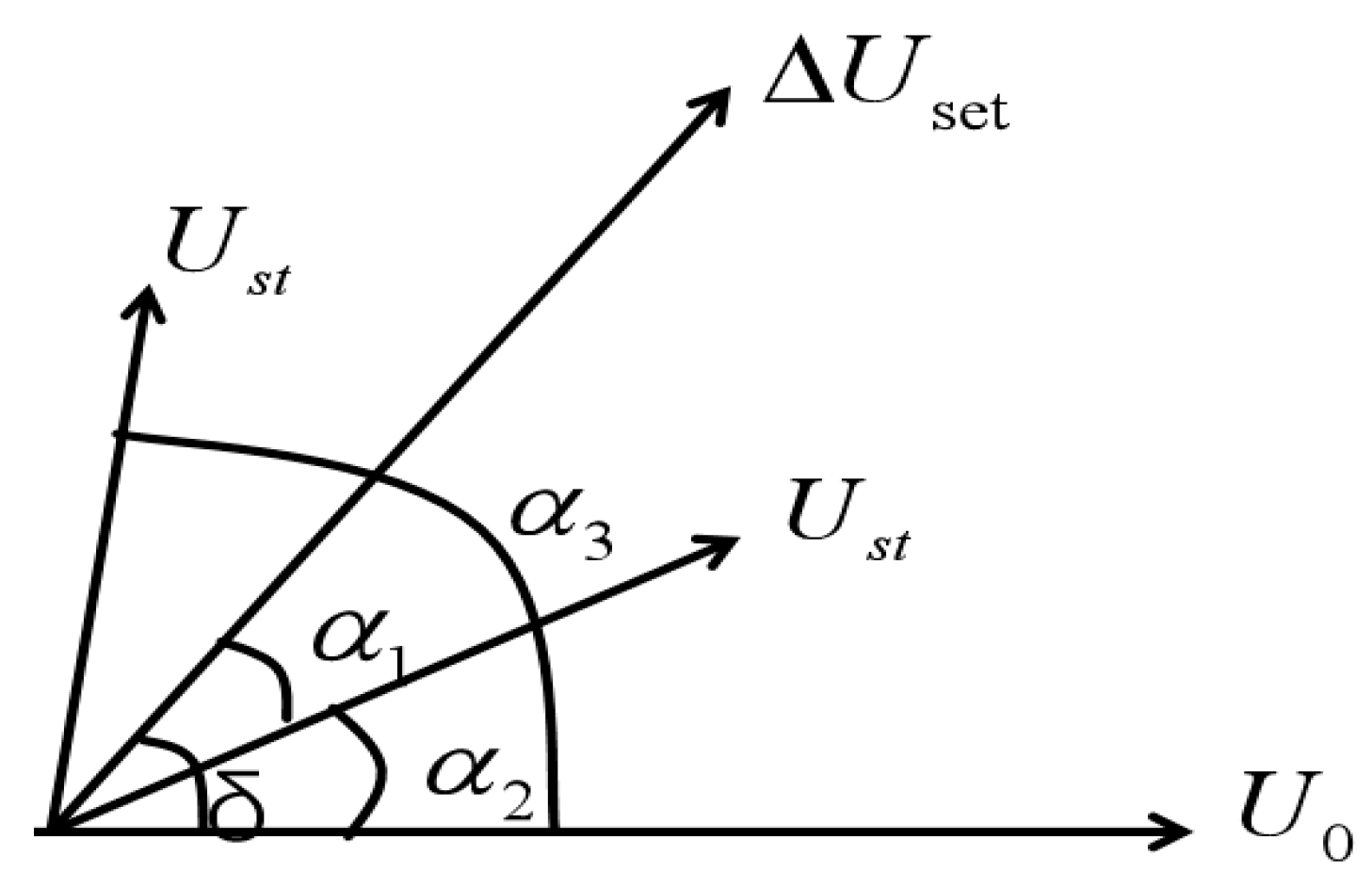
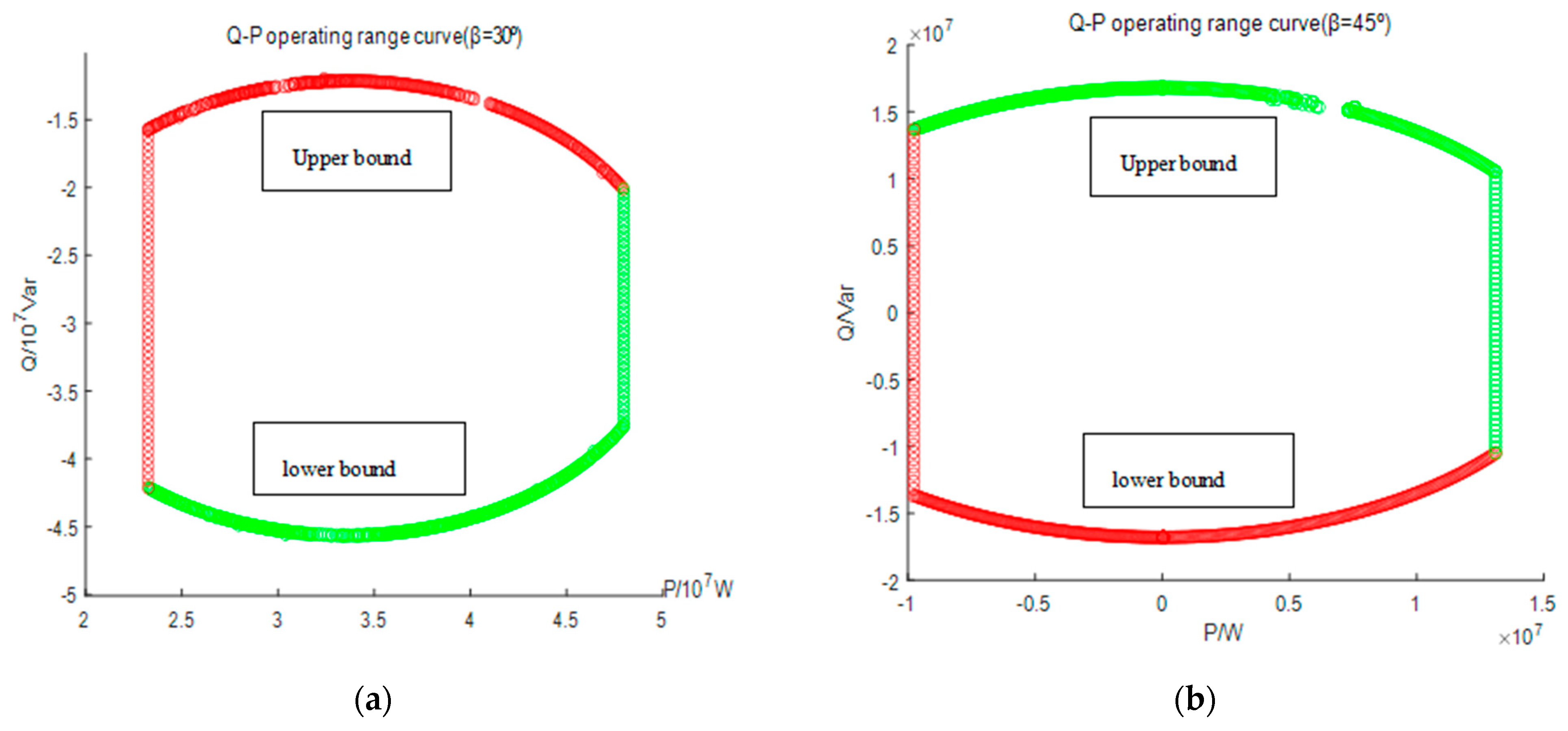
3.2. Q–P Operating Range Curve Construction (Using the Angle Between U1 and U2 as an Example of β)
4. Simulation Verification
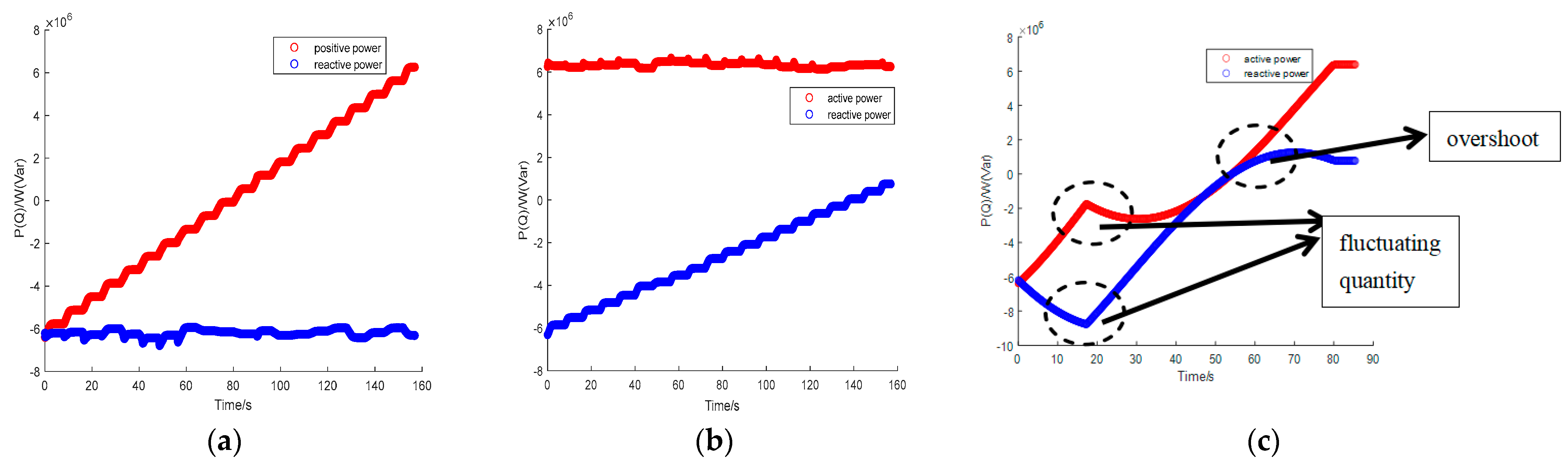
4.1. Voltage In-Phase Line Simulation of 10 kV
- (1)
- The initial vision in power is as follows:
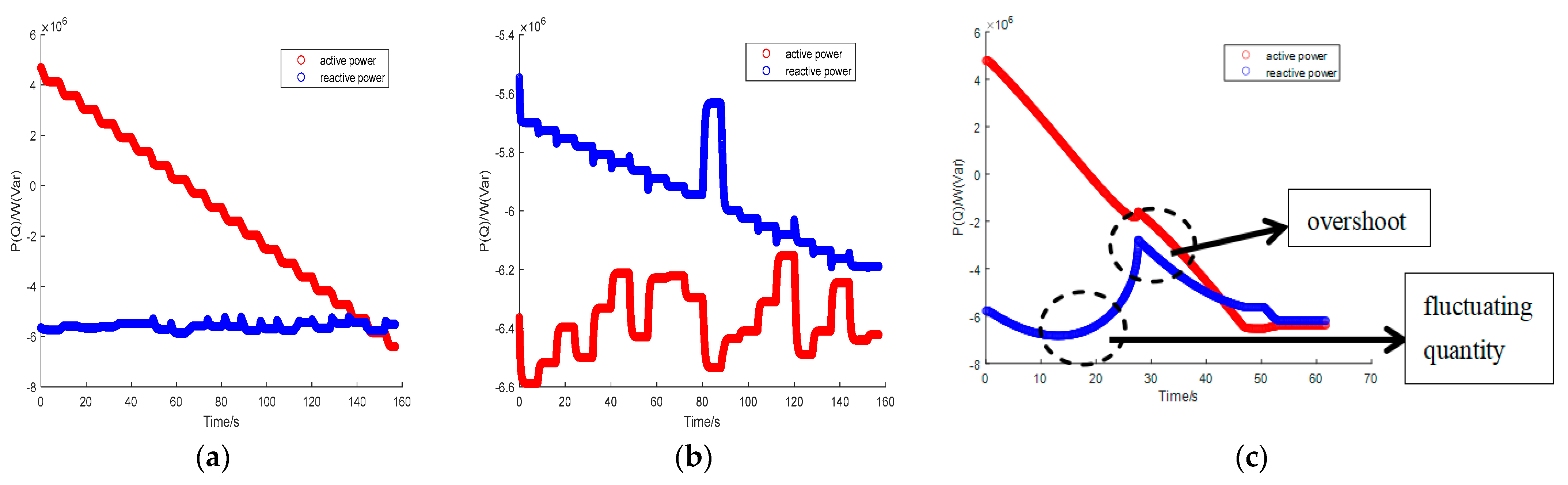
- (2)
- The initial vision in power is as follows:
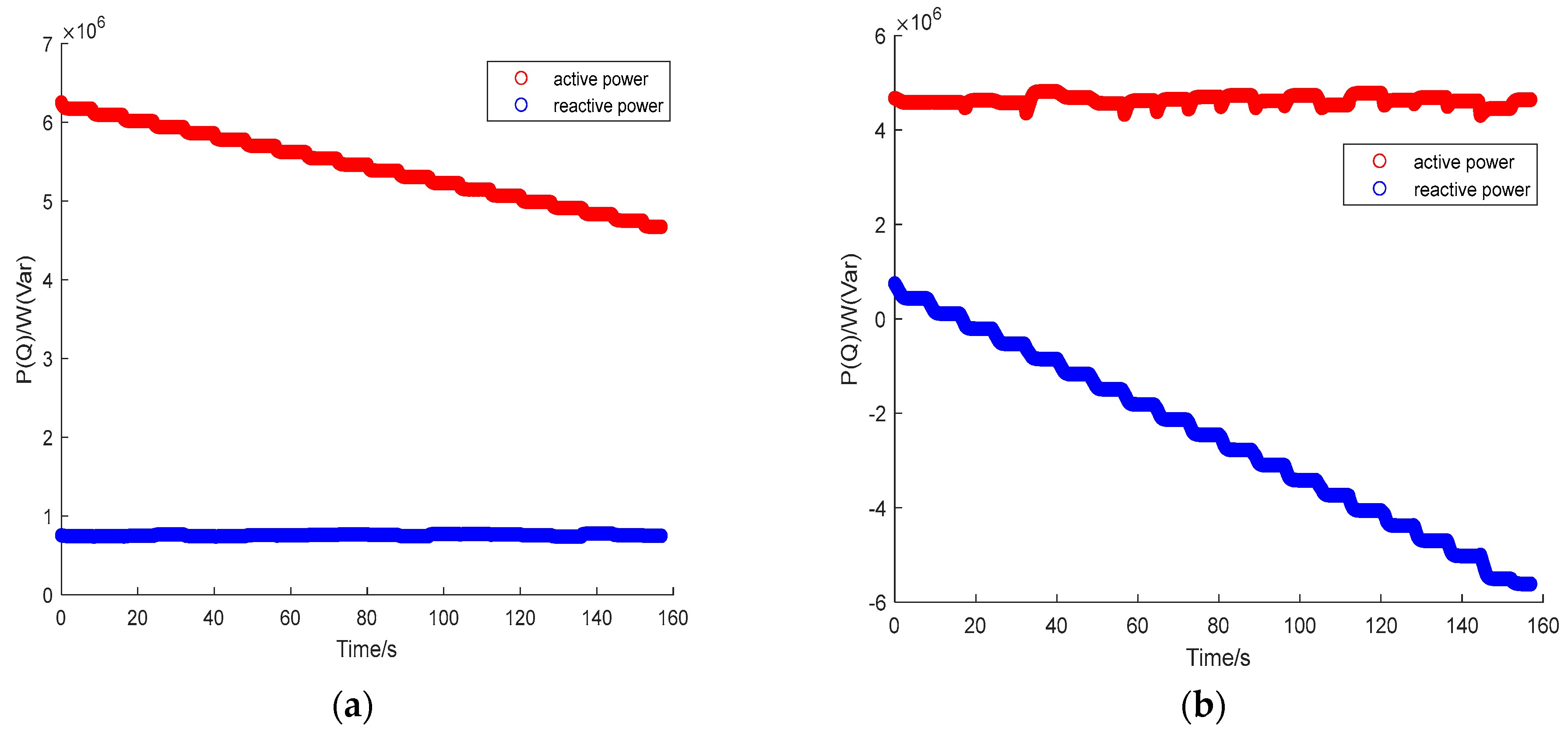
- (3)
- The initial vision in power is as follows:
4.2. Q-P Operating Range Curve of 10 kV
5. Conclusions
- This paper introduces intelligent optimization algorithms into the power regulation control strategy for Rotating Power Flow Controllers (RPFCs) for the first time. Through simulations, it was found that the proposed strategy can effectively meet the objectives of independent regulation of the active and reactive powers, providing a potential pathway for pursuing more precise power regulation in the future.
- Compared with adaptive adjustment strategies, the strategy proposed in this paper considers all factors related to the transmission line without the need for neglect due to decoupling requirements. Therefore, it aligns more closely with actual conditions during the adjustment process, resulting in smaller power overshoots and fluctuations. However, due to the relatively basic nature of the algorithm, the adjustment duration is longer. In the future, more advanced algorithms from the field of artificial intelligence can be utilized to improve the adjustment rate.
- The control strategy proposed in this paper allows for plotting the Q-P operating range diagram for line power flow. In practical engineering, technicians can refer to these diagrams to avoid target powers that do not align with actual conditions, thereby enhancing the adjustment efficiency. In the future, relevant algorithms can be employed to calculate relevant parameters during the power adjustment process of RPFCs, improving the execution efficiency of power regulation.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, J.L.; Liu, X.M.; Lu, X. Analysis methods and countermeasures for supply-demand balance of high proportion new energy systems. High Volt. Technol. 2023, 49, 2711–2724. [Google Scholar]
- Ma, W.M. Some Thoughts on the Development of Frontier Technologies in Electrical Engineering. J. Electr. Eng. 2021, 36, 4627–4636. [Google Scholar]
- Zhou, X.X.; Chen, S.Y.; Lu, Z.X. Technical Characteristics of China’s New Generation Power System in Energy Transition. Chin. J. Electr. Eng. 2018, 38, 1893–1904+2205. [Google Scholar]
- Yan, X.W.; Peng, W.F.; Jia, J.X. Research on Power Regulation Method of Rotary Power Flow Controller Based on Adaptive Control of Rotation Speed. Proc. Chin. Soc. Electr. Eng. 2023, 43, 4971–4987. [Google Scholar]
- Li, S.; Tang, F.; Liu, D.C. Study on the Efficiency of Distributed Power Flow Controllers in Improving Maximum Transmission Capacity Expectations and Power Supply Reliability. Grid Technol. 2018, 42, 1573–1580. [Google Scholar]
- Fujita, H.; Hara, S.; Piwko, K.J. Simulator model of rotary power flow controller. In Proceedings of the 2001 Power Engineering Society Summer Meeting, Vancouver, BC, Canada, 15–19 July 2001; pp. 1794–1797. [Google Scholar]
- Larsen, E.V. Power Flow Control with Rotary Transformers. U.S. Patent 5,841,267, 24 November 1998. [Google Scholar]
- Larsen, E.V. Power Flow Control and Power Recovery with Rotary Transformers. U.S. Patent 5,953,225, 14 September 1999. [Google Scholar]
- Fardanesh, B.; Schuff, A. Dynamic Studies of the NYS transmission system with the marcy csc in the UPFC and IPFC configurations. In Proceedings of the 2003 IEEE PES Transmission and Distribution Conference and Exposition, Dallas, TX, USA, 7–12 September 2003; pp. 1126–1130. [Google Scholar]
- Kim, S.Y.; Yoon, J.S.; Chang, H.B. The operation experience of KEPCO UPFC. In Proceedings of the Intermational Conference on Electrical Machines and Systems (ICEMS 2005), Nanjing, China, 27–29 September 2005; pp. 1–4. [Google Scholar]
- Qi, W.C.; Yang, L.; Song, P.C. UPFC system control strategy research in Nanjing western power grid. Power Syst. Technol. 2016, 40, 92–96. [Google Scholar]
- Ba, A.O.; Peng, T.; Lefebvre, S. Rotary Power-Flow Controller for Dynamic Performance Evaluation—Part I: RPFC Modeling. IEEE Trans. Power Deliv. 2009, 24, 1406–1416. [Google Scholar] [CrossRef]
- Haddadi, A.M.; Kazemi, A. Optimal power flow control by rotary power flow controller. Adv. Electr. Comput. Eng. 2011, 11, 79–86. [Google Scholar] [CrossRef]
- Ba, A.O.; Peng, T.; Lefebvre, S. Rotary Power-Flow Controller for Dynamic Performance Evaluation—Part II: RPFC Application in a Transmission Corridor. IEEE Trans. Power Deliv. 2009, 24, 1417–1425. [Google Scholar] [CrossRef]
- Tan, Z.L.; Zhang, C.P.; Jiang, Q.R. Comparison of Rotary Power Flow Controller and Unified Power Flow Controller with Sen Transformer. Power Syst. Technol. 2016, 40, 868–874. [Google Scholar]
- Tan, Z.L.; Zhang, C.P.; Jiang, Q.R. Study on Steady-state Characteristics of Rotary Power Flow Controller. Power Syst. Technol. 2015, 39, 1921–1926. [Google Scholar]
- Tan, Z.L.; Zhang, C.P.; Jiang, Q.R. Research on characteristics and power flow control strategy of rotary power flow controller. In Proceedings of the 2015 5th International Youth Conference on Energy (IYCE), Pisa, Italy, 27–30 May 2015; pp. 1–8. [Google Scholar]
- Jia, J.X.; Peng, W.F.; Yan, X.W. Decoupling Control Method of Rotary Power Flow Controller Based on Cosine Theorem. J. Electr. Eng. Technol. 2023, 38, 3425–3435. [Google Scholar]
- Yan, X.W.; Peng, W.F.; Shao, C. Voltage Regulation Method of User Side Based on Rotary Power Flow Controller. J. Electr. Eng. Technol. 2023, 38 (Suppl. S1), 70–79+113. [Google Scholar]
- Zhang, Z.Y.; Jia, J.X.; Lu, J.D. Optimal allocation of energy storage participating in peak shaving based on improved hybrid particle swarm optimization. In Proceedings of the 2023 IEEE 6th International Electrical and Energy Conference (CIEEC), Hefei, China, 12–14 May 2023; pp. 2245–2250. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Numeric Value |
|---|---|
| The voltage at the first end of the line | |
| Line end voltage | |
| Line impedance | |
| RPFC intrinsic impedance | |
| RPFC voltage adjustable range/V | |
| RPFC with adjustable angle/° |
| Parameter | Numeric Value |
|---|---|
| The voltage at the first end of the line | |
| Line end voltage | |
| Line impedance | |
| RPFC intrinsic impedance | |
| RPFC voltage adjustable range/V | |
| RPFC with adjustable angle/° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Jia, J.; Aslam, W.; Siddique, A.; Albogamy, F.R. Control Strategy of a Rotating Power Flow Controller Based on an Improved Hybrid Particle Swarm Optimization Algorithm. Math. Comput. Appl. 2025, 30, 20. https://doi.org/10.3390/mca30010020
Zhang Z, Jia J, Aslam W, Siddique A, Albogamy FR. Control Strategy of a Rotating Power Flow Controller Based on an Improved Hybrid Particle Swarm Optimization Algorithm. Mathematical and Computational Applications. 2025; 30(1):20. https://doi.org/10.3390/mca30010020
Chicago/Turabian StyleZhang, Ziyang, Jiaoxin Jia, Waseem Aslam, Abubakar Siddique, and Fahad R. Albogamy. 2025. "Control Strategy of a Rotating Power Flow Controller Based on an Improved Hybrid Particle Swarm Optimization Algorithm" Mathematical and Computational Applications 30, no. 1: 20. https://doi.org/10.3390/mca30010020
APA StyleZhang, Z., Jia, J., Aslam, W., Siddique, A., & Albogamy, F. R. (2025). Control Strategy of a Rotating Power Flow Controller Based on an Improved Hybrid Particle Swarm Optimization Algorithm. Mathematical and Computational Applications, 30(1), 20. https://doi.org/10.3390/mca30010020