
Learning Motion Primitives Automata for Autonomous Driving Applications


Abstract
:1. Introduction
1.1. Related Work
1.2. Contributions
2. Dynamical Control System Representation by Automata
2.1. Symmetry and Motion Primitives
- to generate trajectories, i.e., for any given trajectory x on , , with corresponding control u on that time interval, also satisfies the dynamical system equations, i.e., it is a solution for any group element ;
- the vector field being equivariant w.r.t. , i.e.,for any pair and being the lift of the symmetry action (detailed out e.g., in [8]);
2.2. Trim Primitives
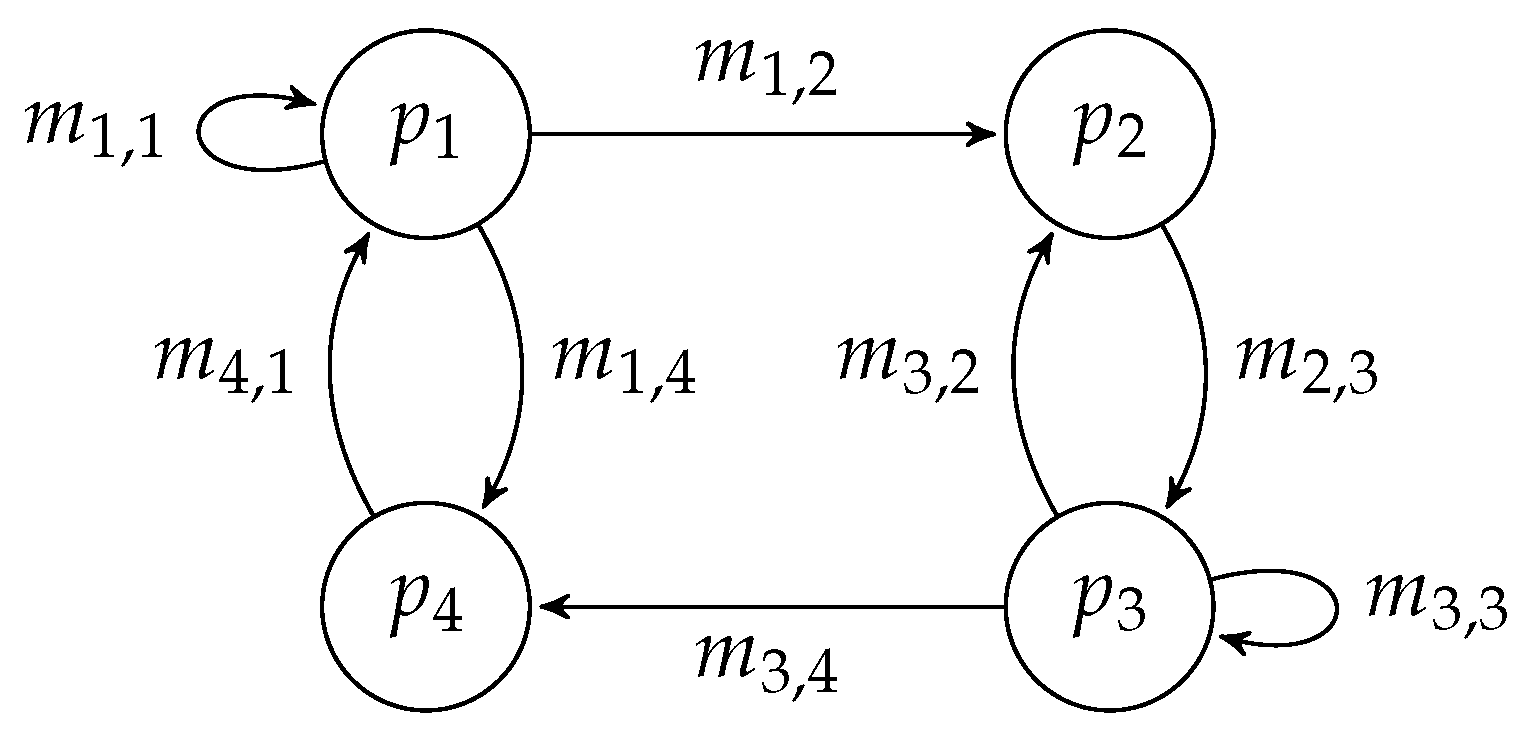
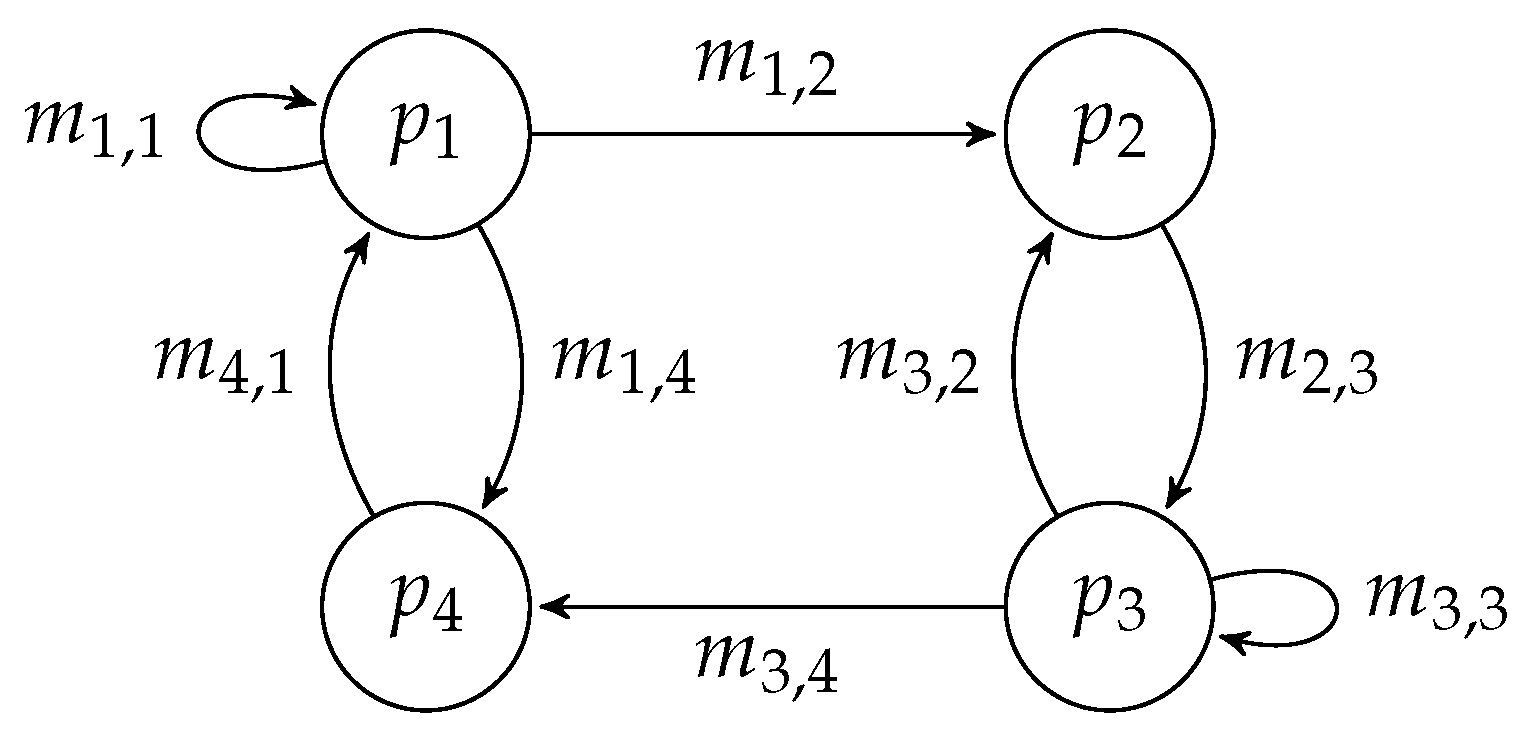
2.3. Automaton and Sequencing
2.4. Shortcomings
3. Generating Data-Based Automata
- 1.
- Finding invariances in terms of trims in data,
- 2.
- Clustering trim primitives,
- 3.
- Evaluating a transition matrix,
- 4.
- Computing maneuvers.
3.1. Assumptions on Data and Model
3.2. Identifying Trim Primitives in Data
3.3. Clustering Trim Primitives
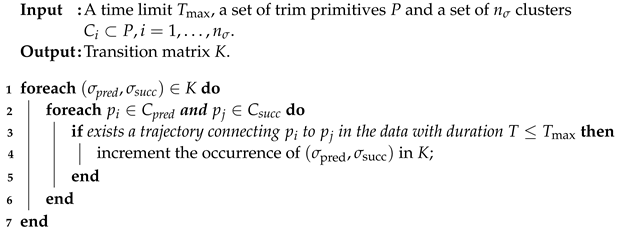
3.4. Identification of Transition Matrix Based on Densities
| Algorithm 1: Pseudo-code of the transition matrix occurrences counter. |
 |
3.5. Automaton Augmentation by Optimized Maneuvers
4. Autonomous Driving
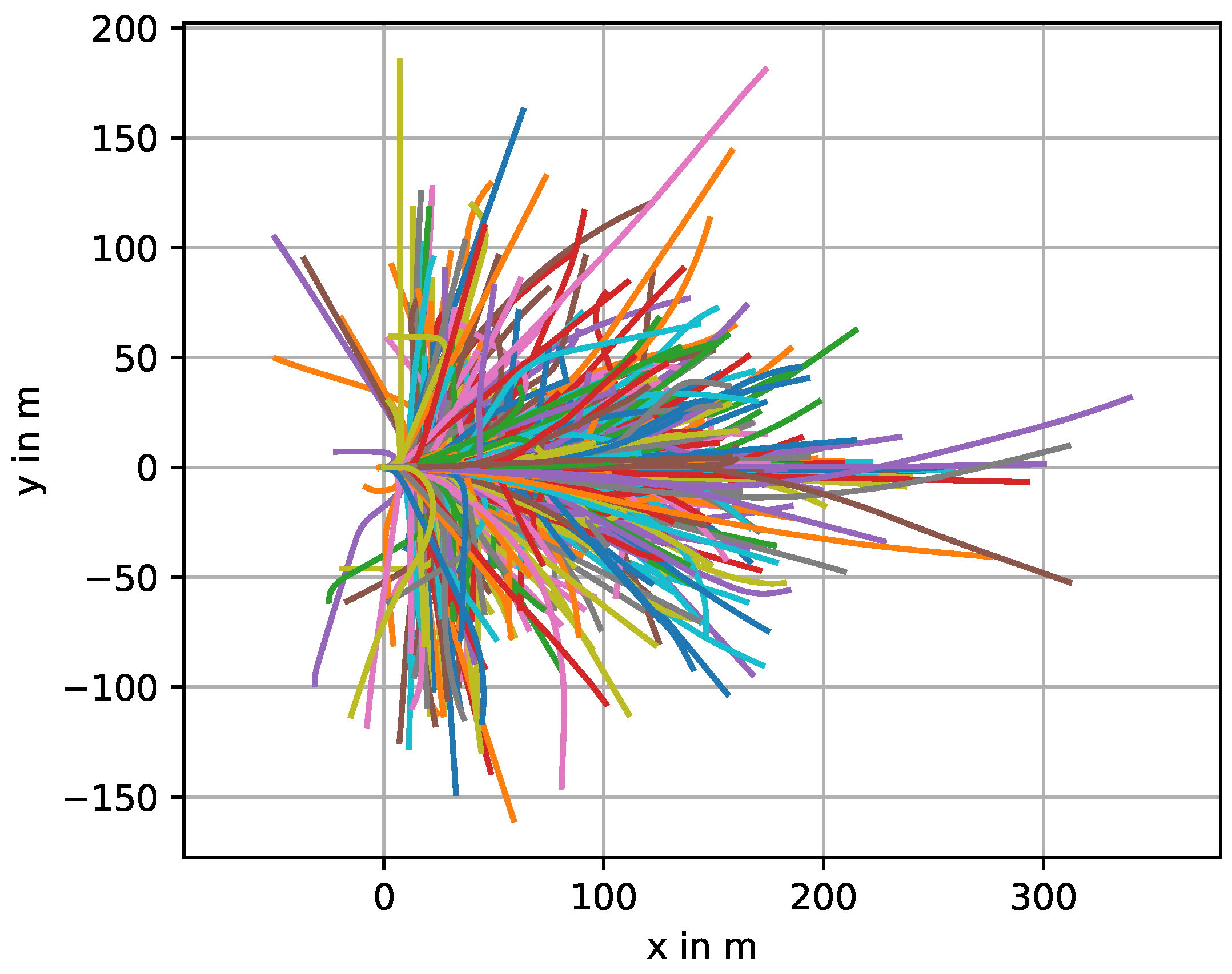
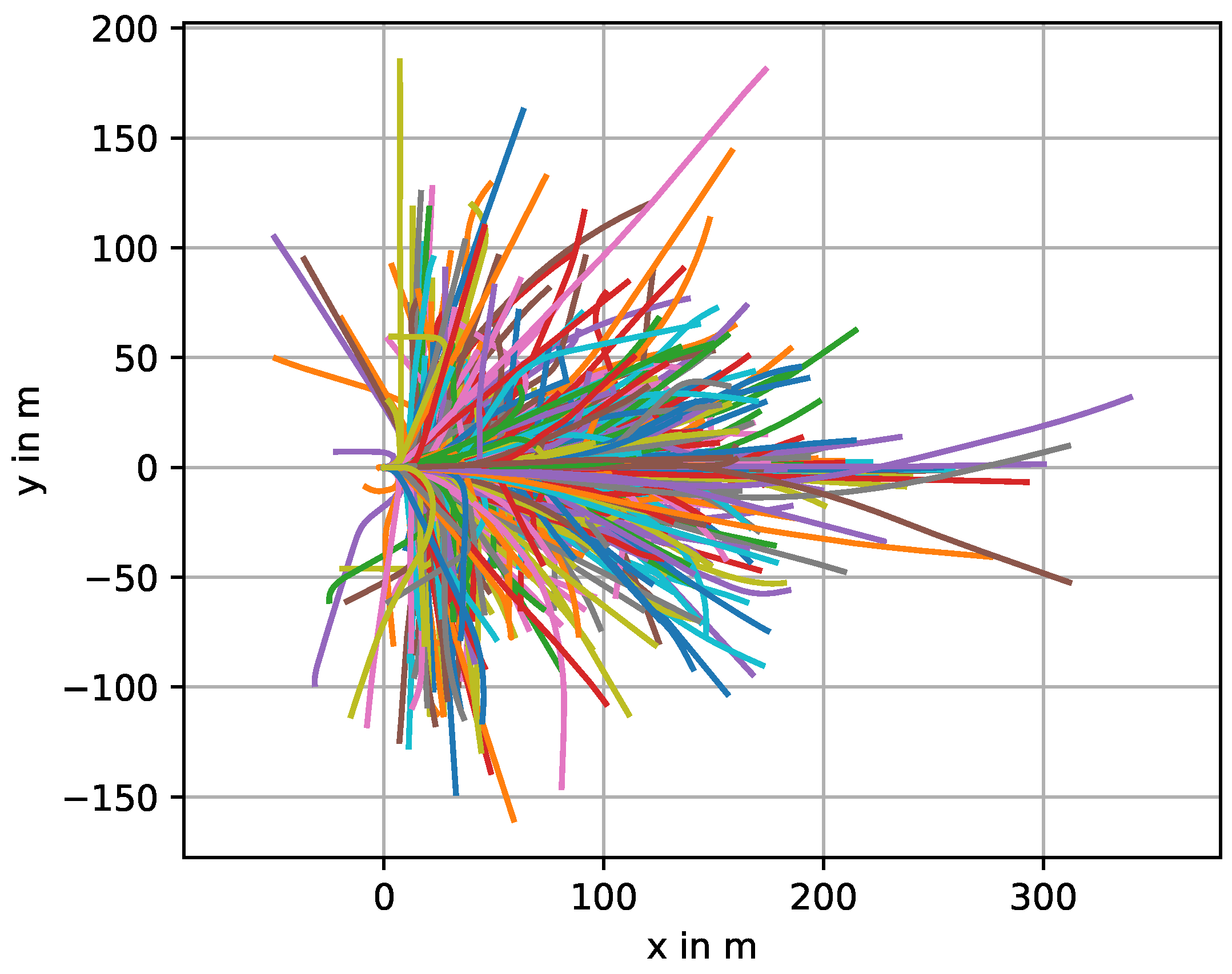
4.1. Data
4.2. Models
4.3. Numerical Examples
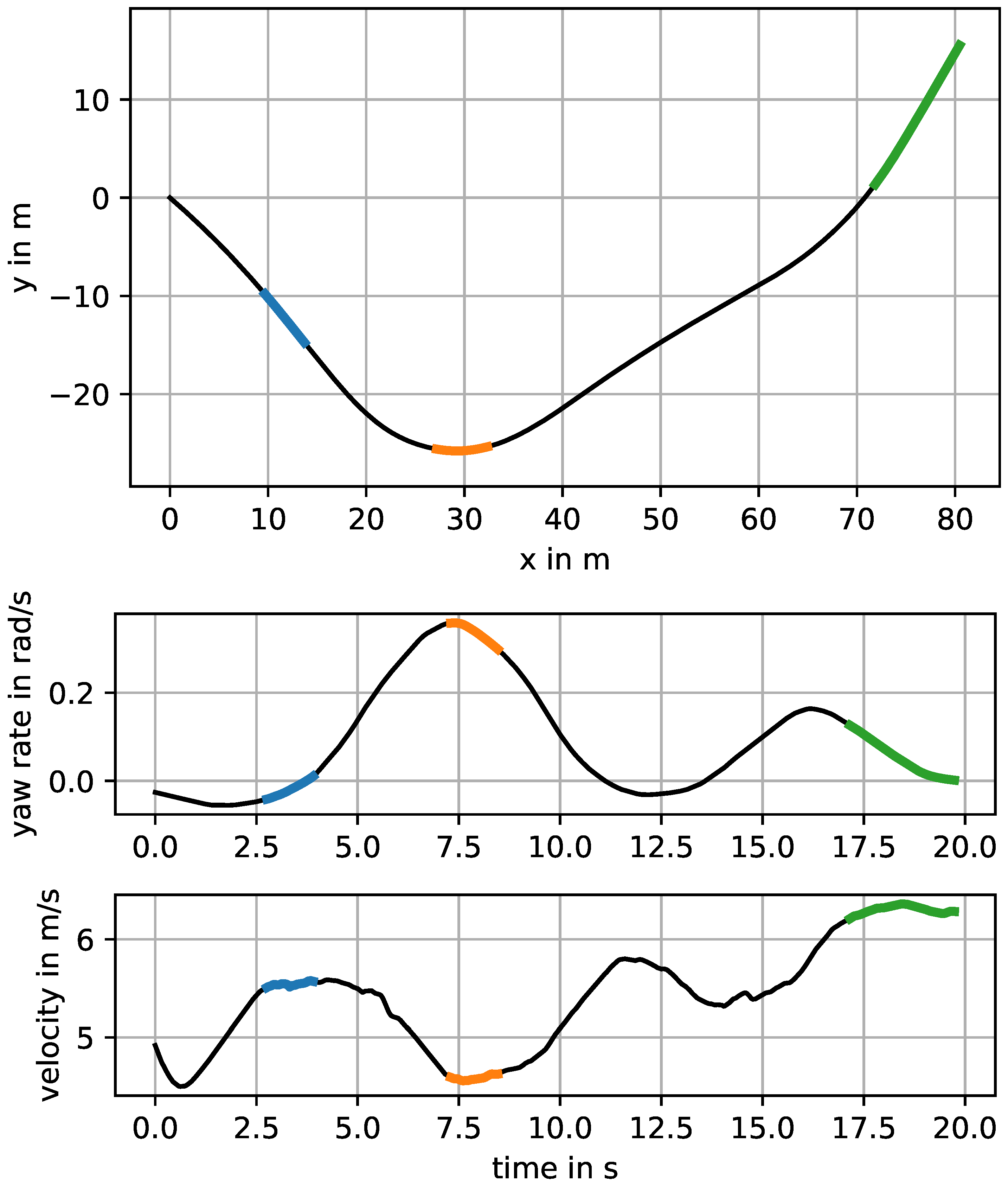
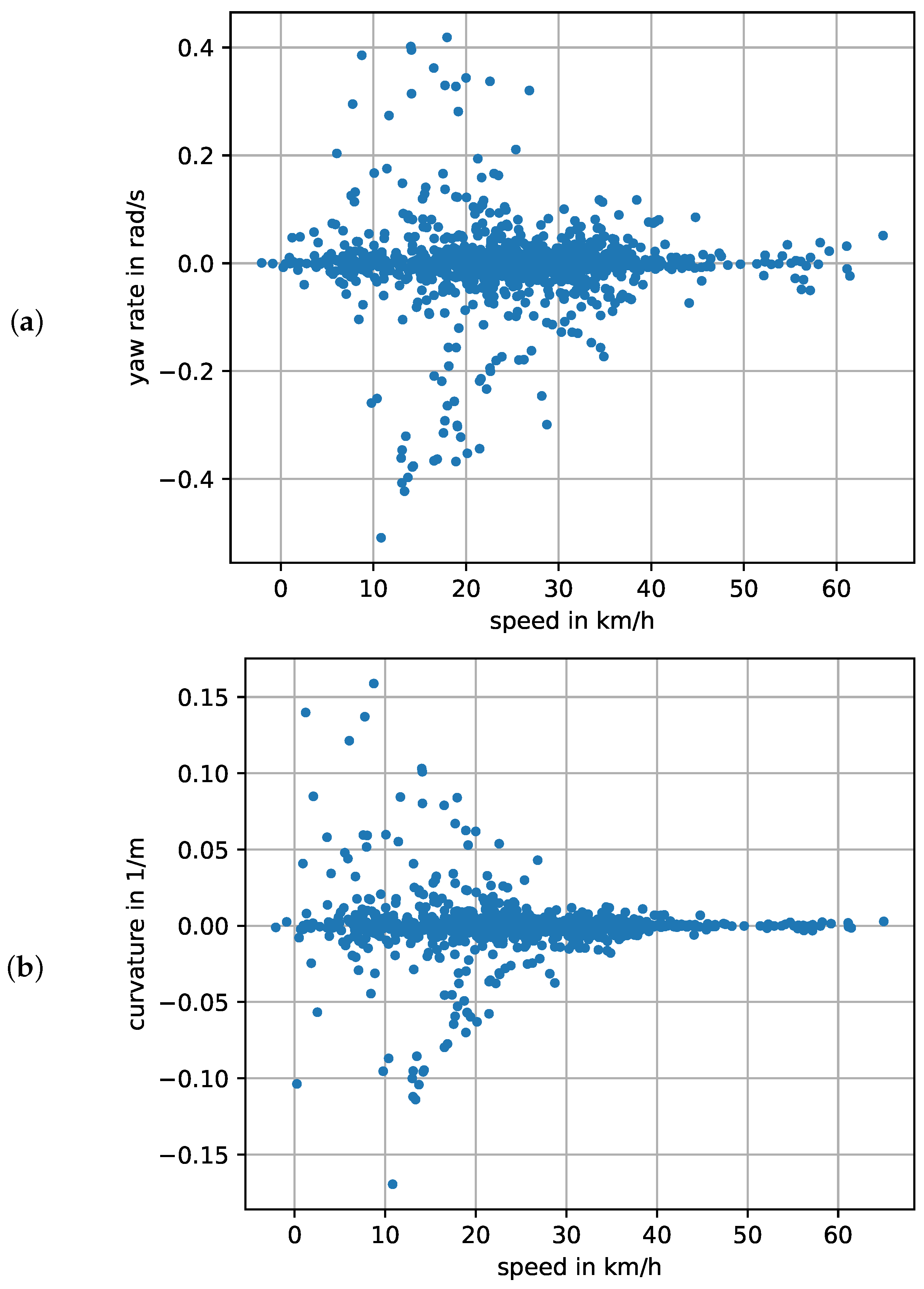
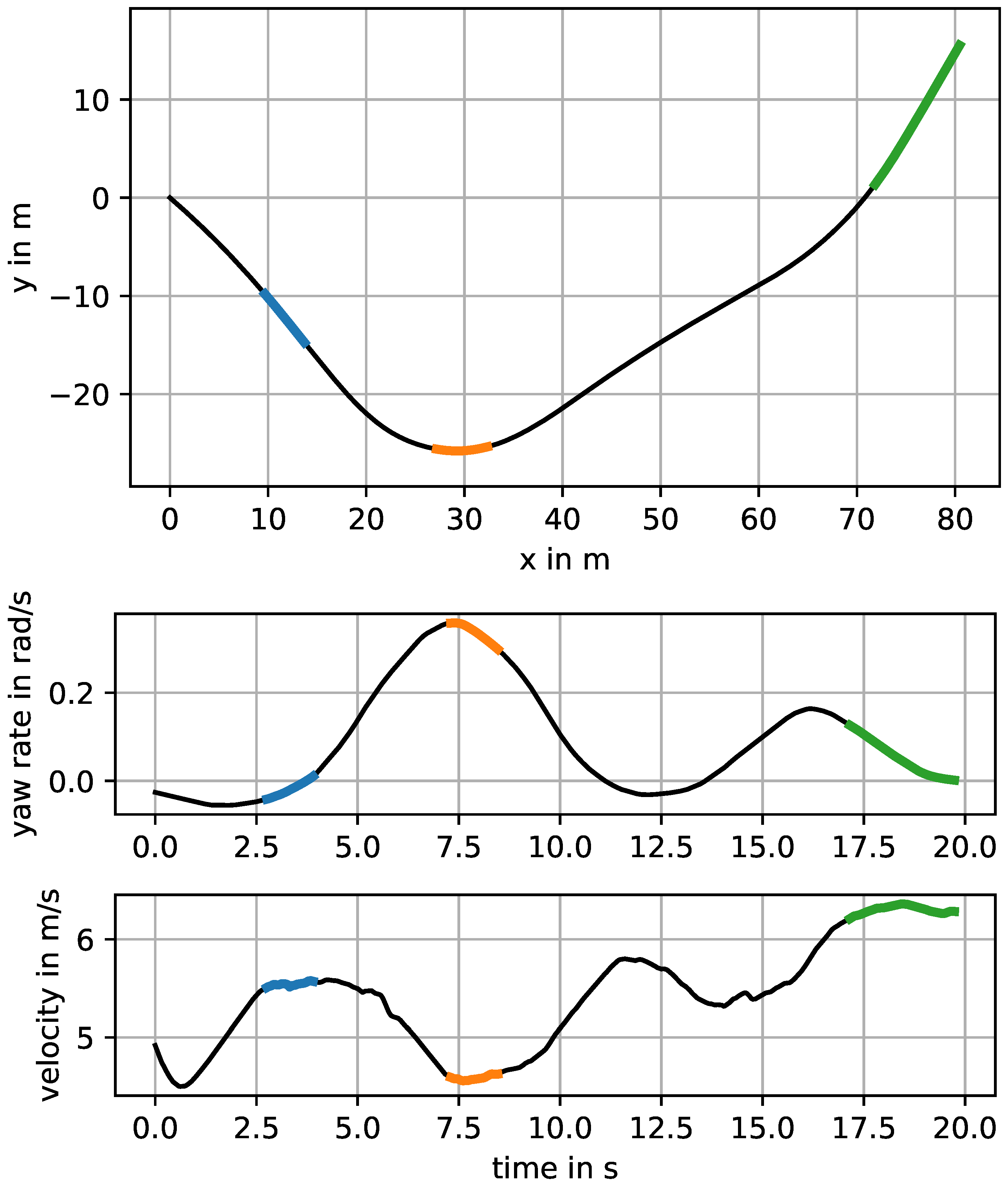
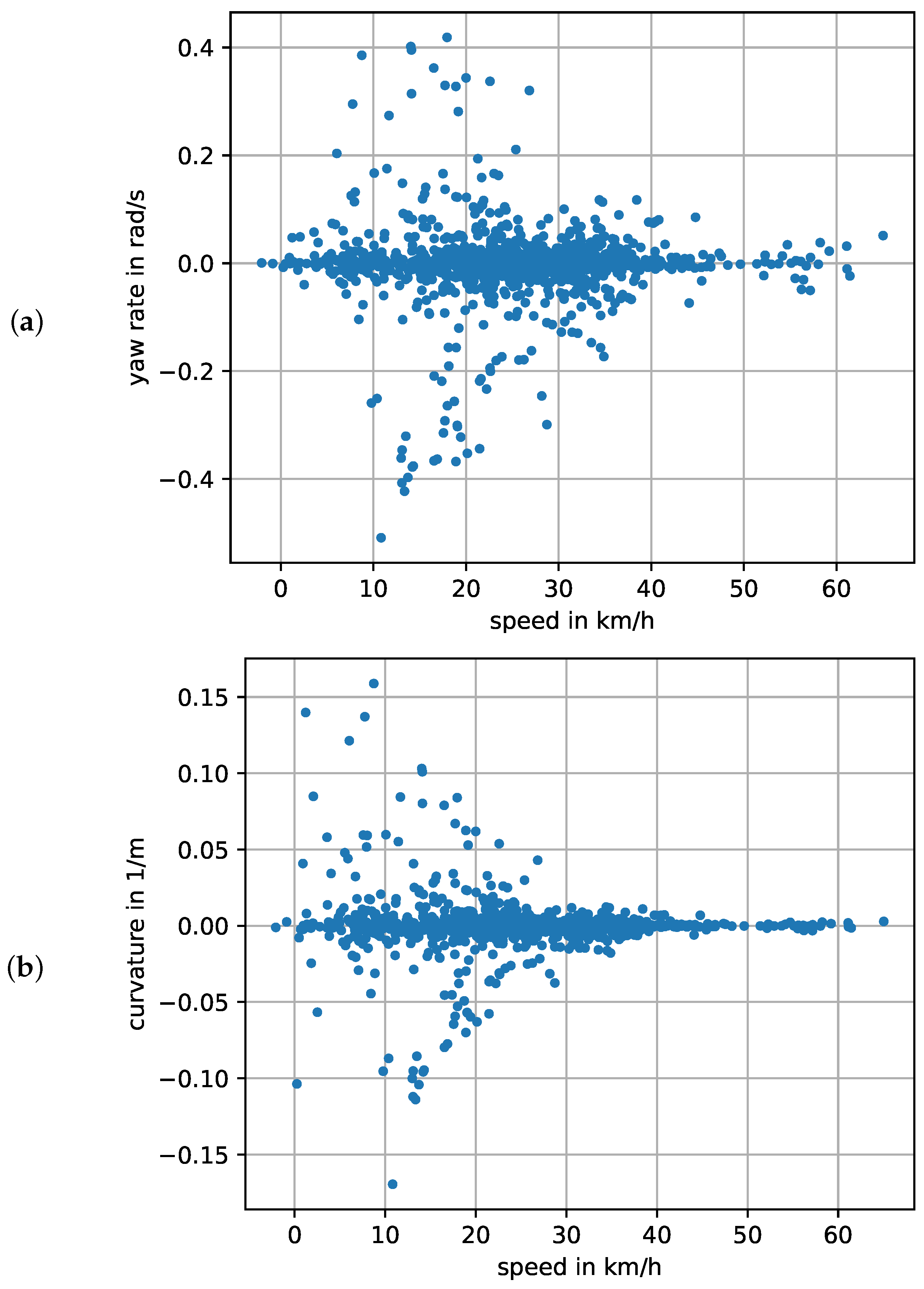
4.3.1. Trim Detection
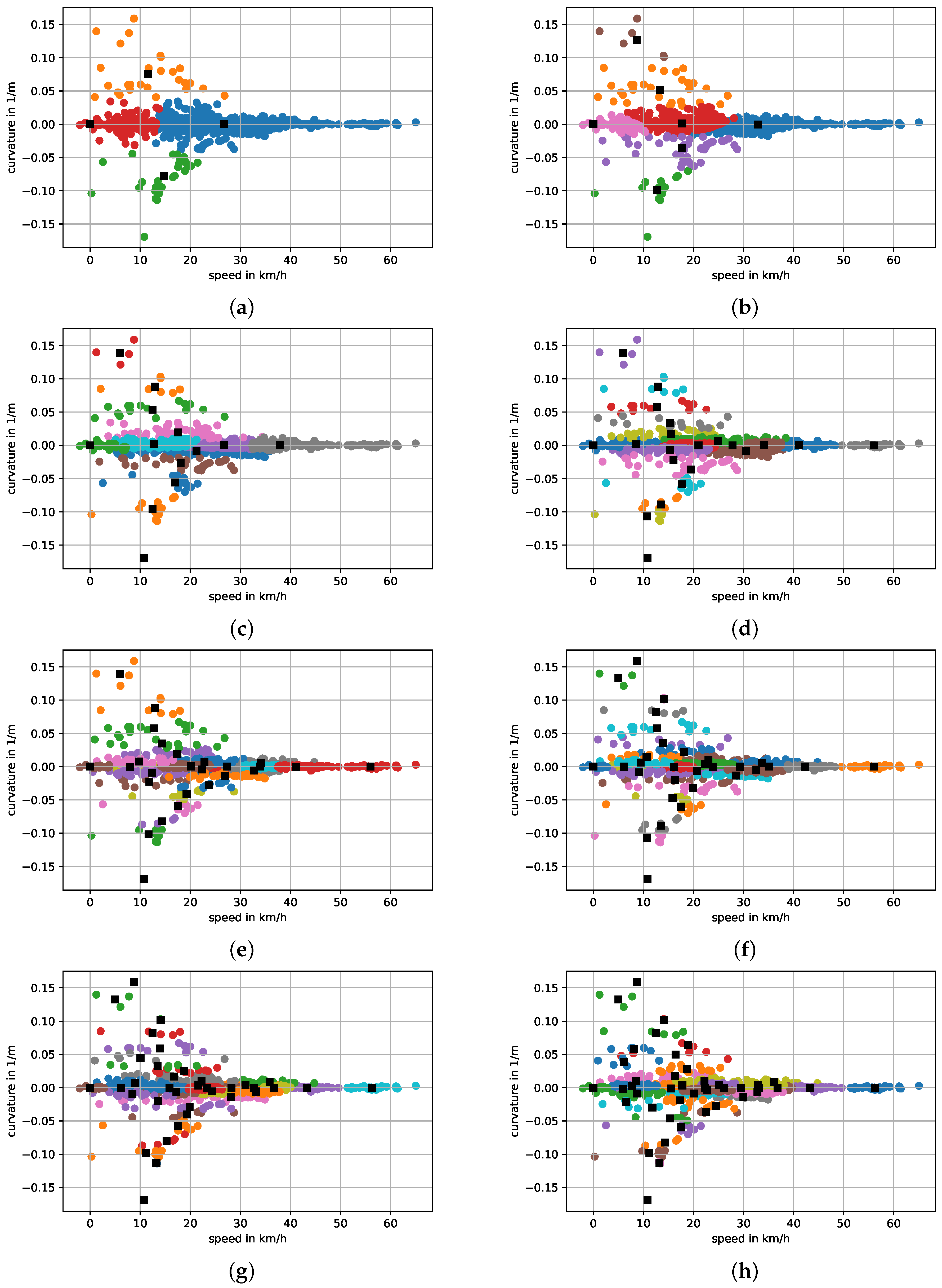
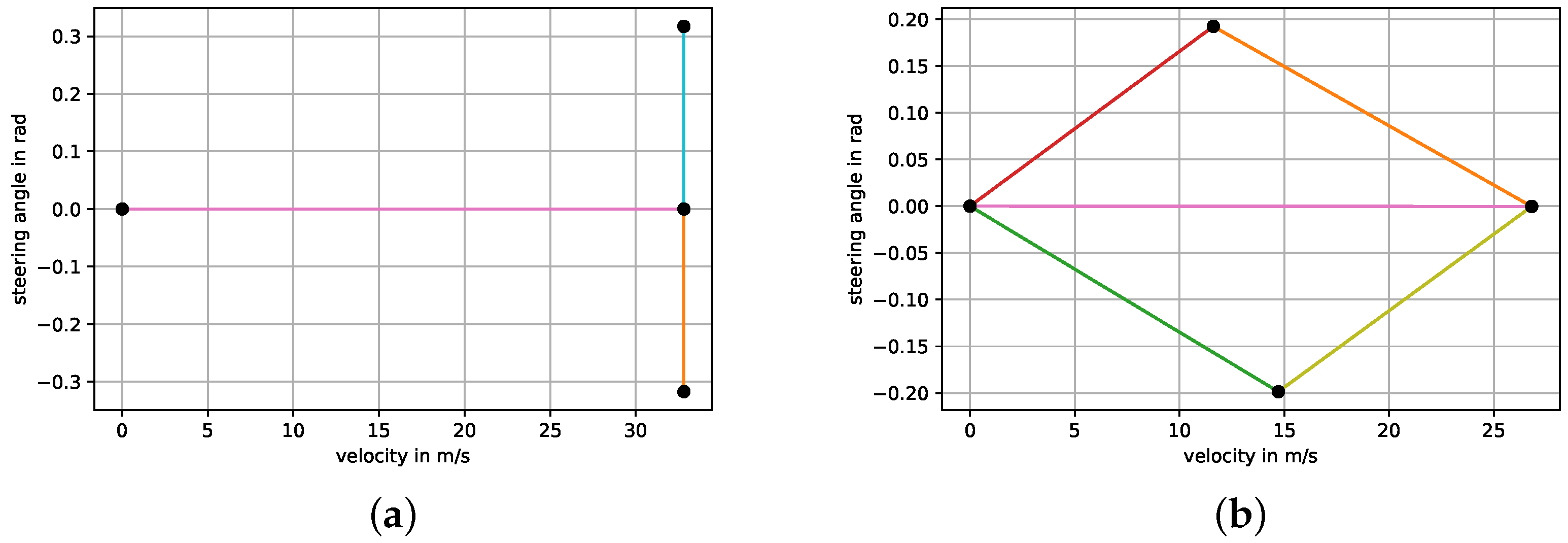
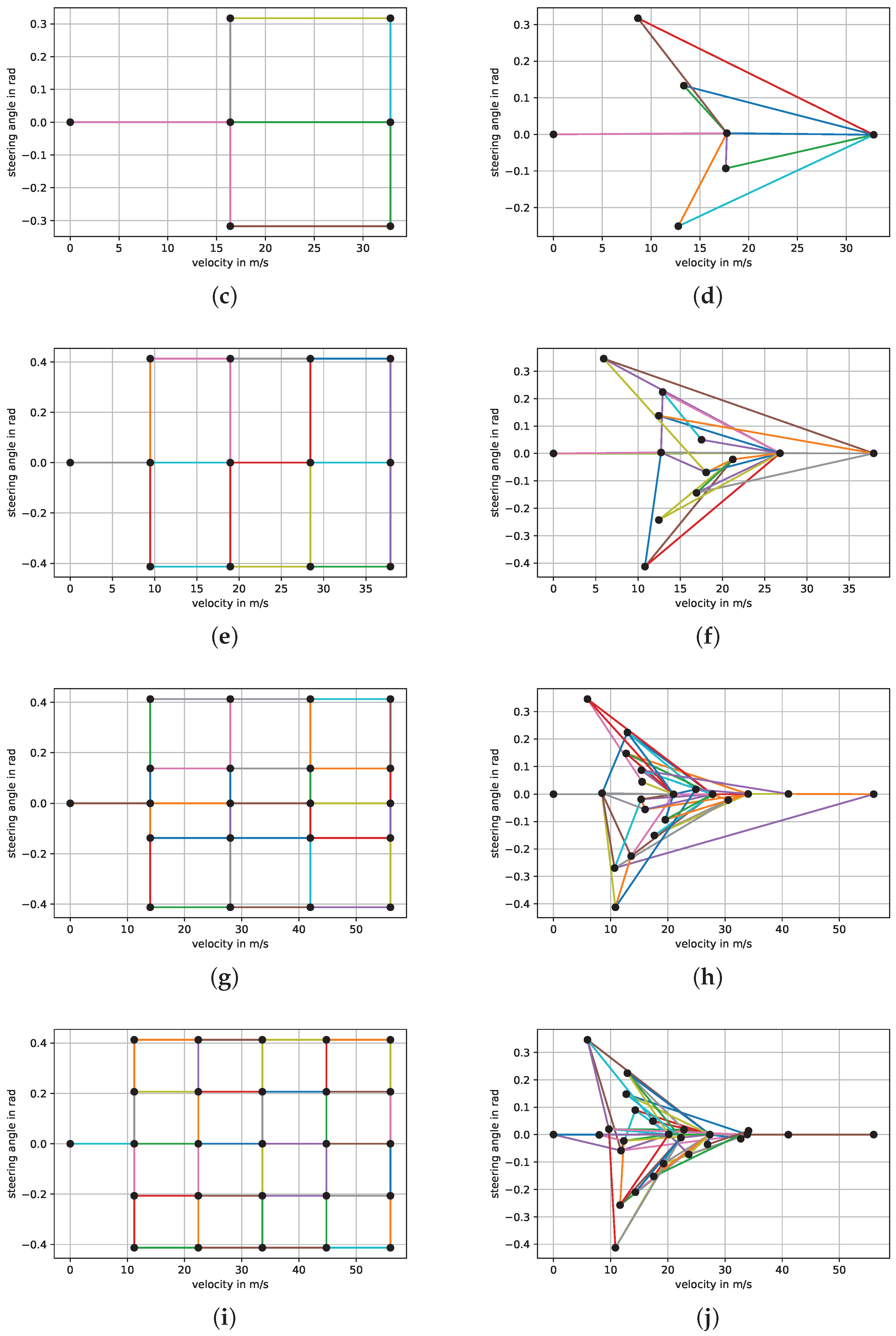
4.3.2. Trim Clustering
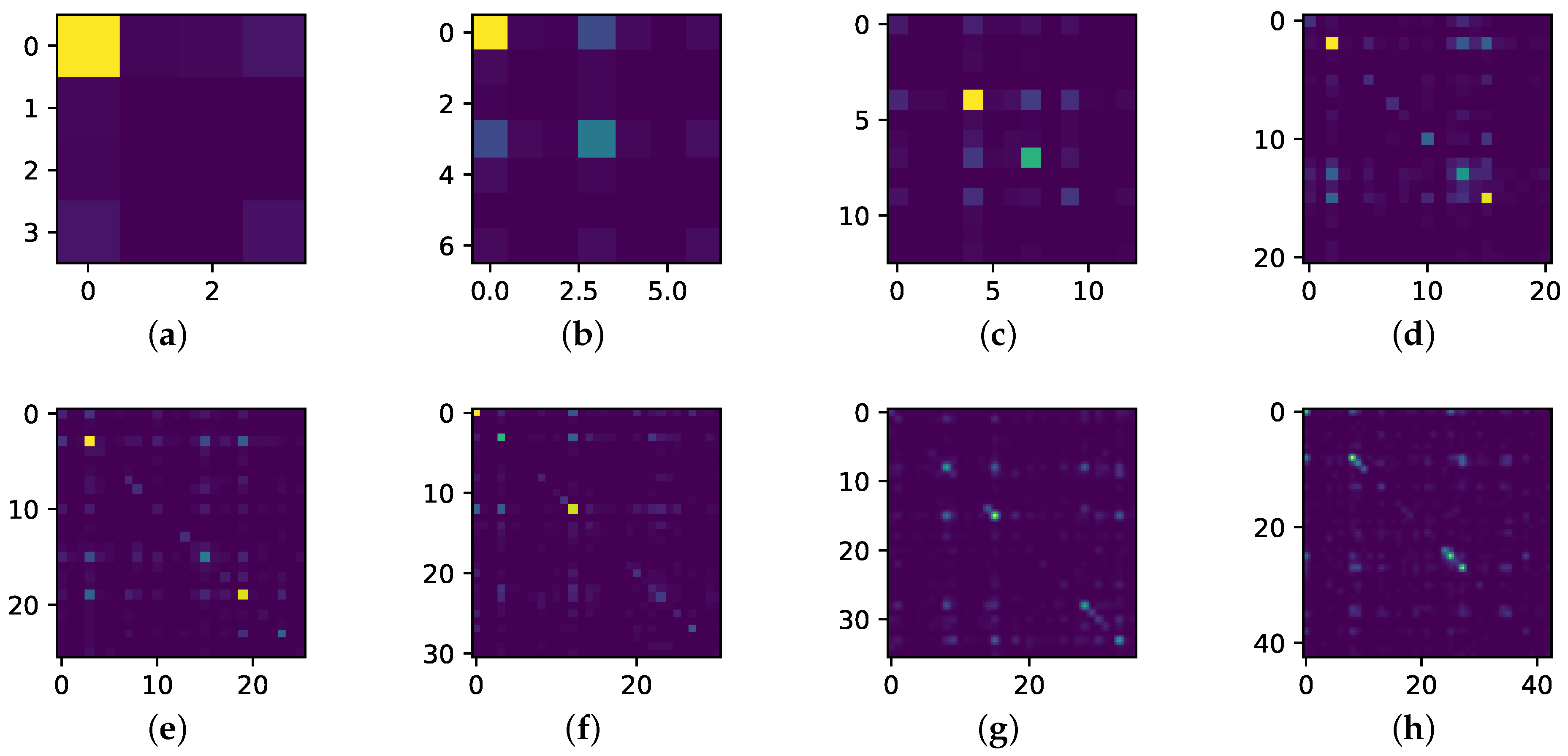
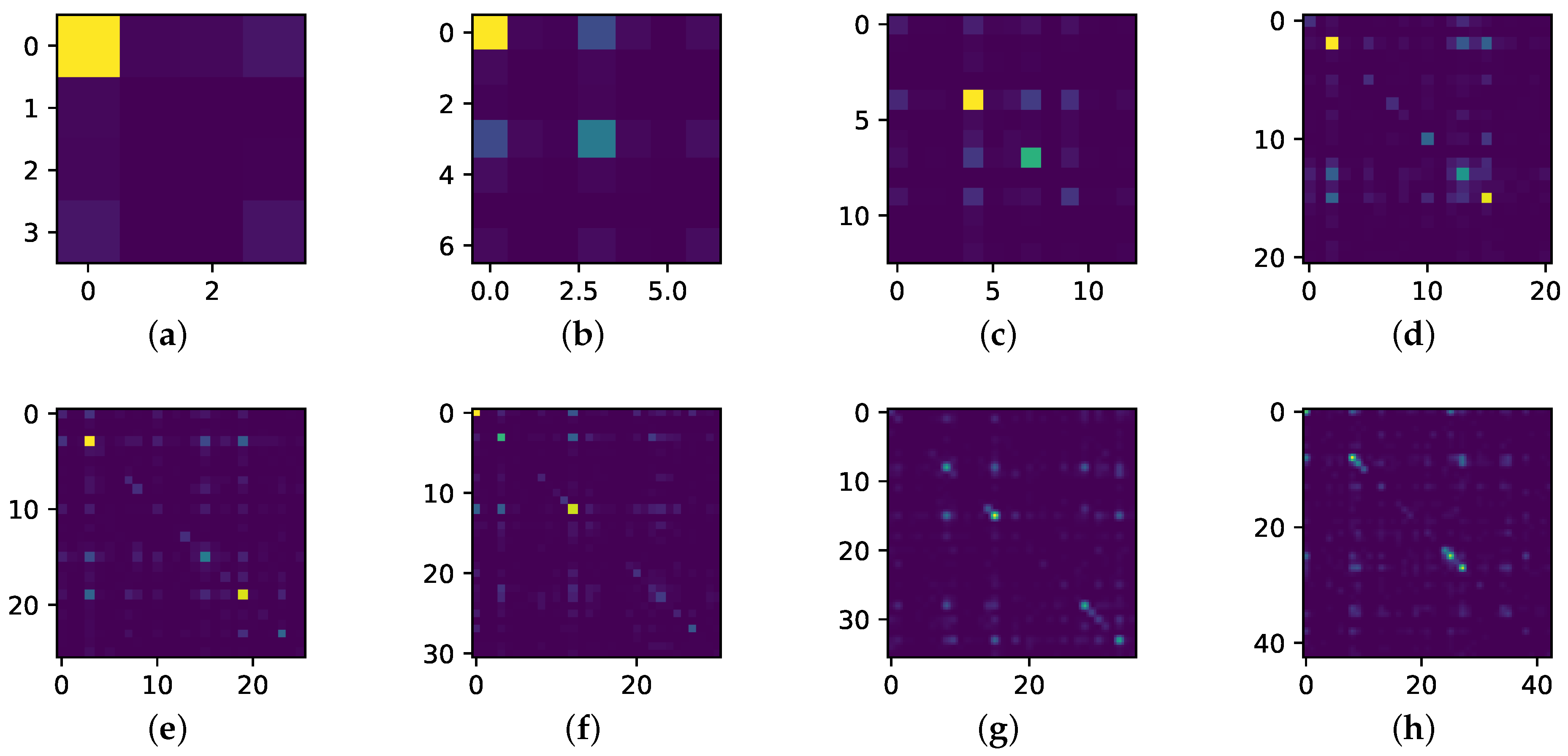
4.3.3. Transition Matrix
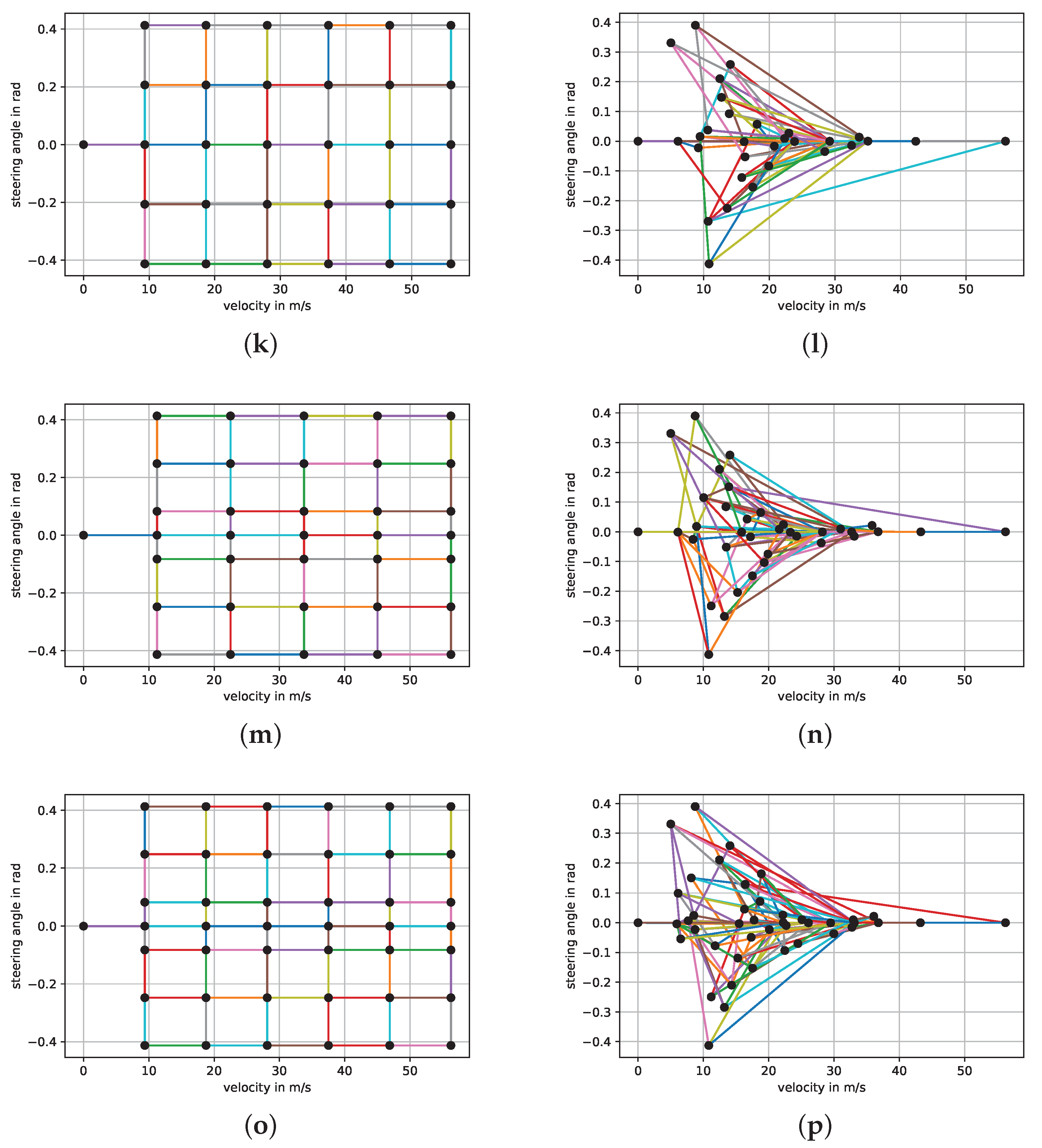
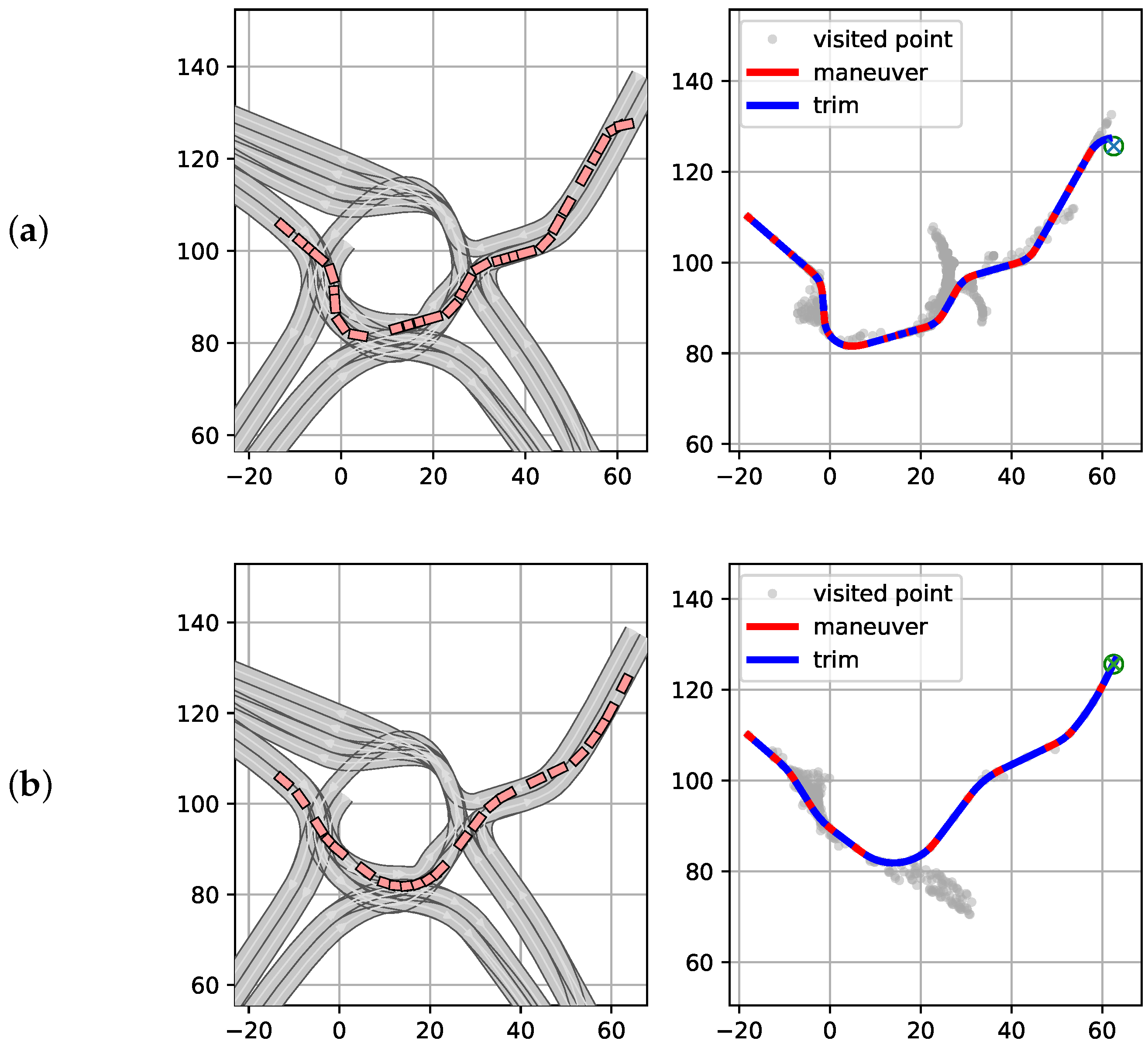
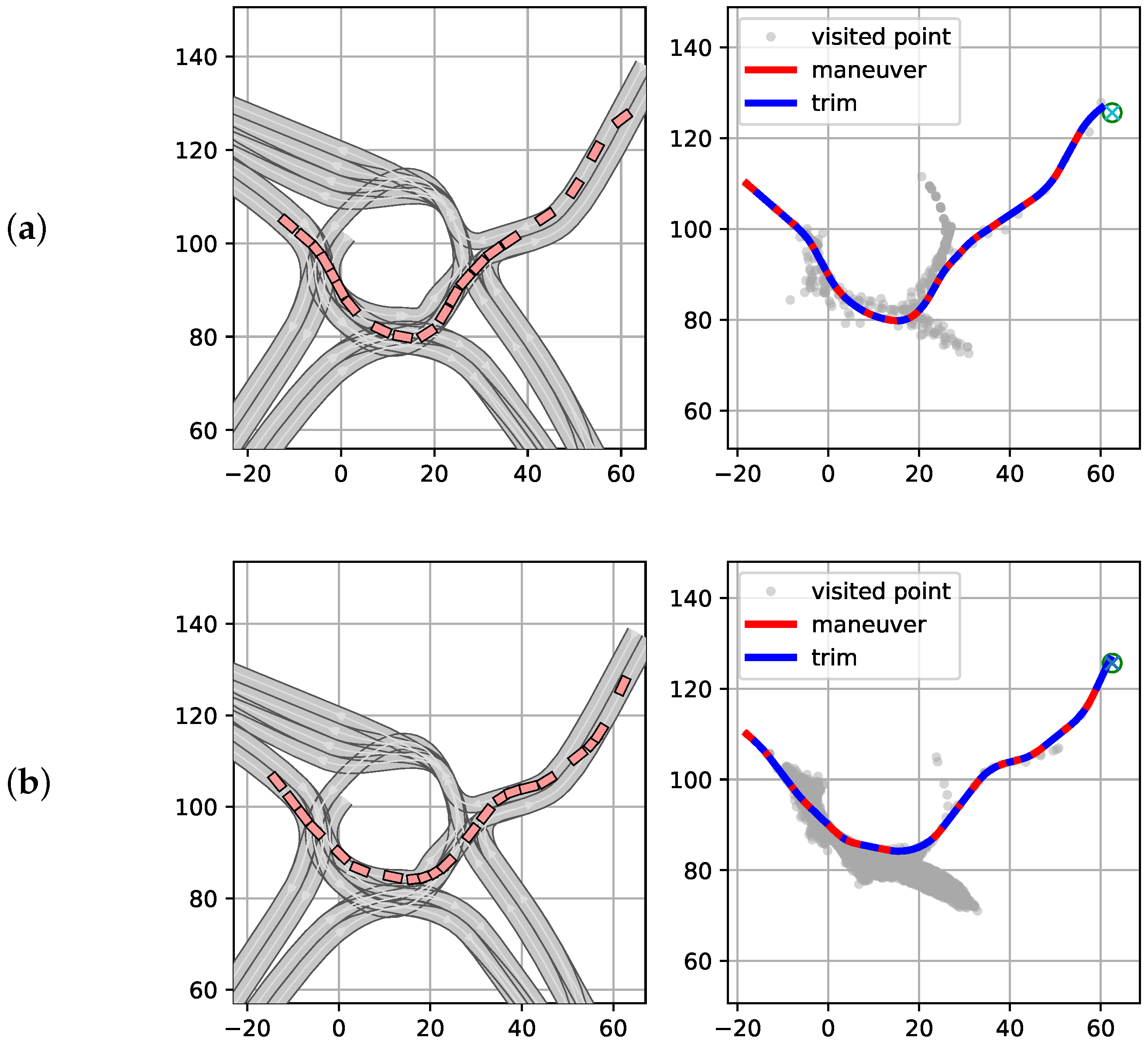
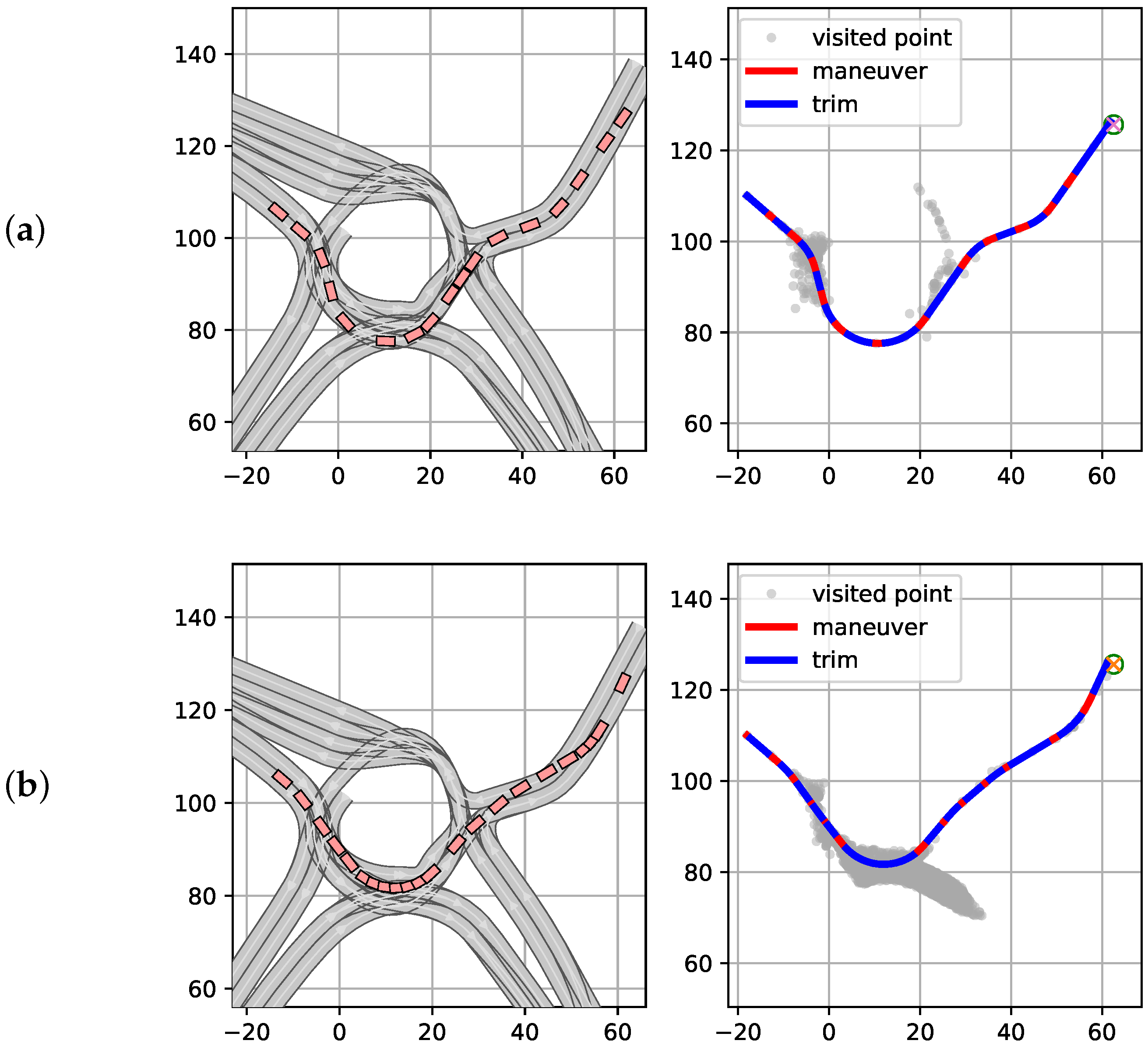
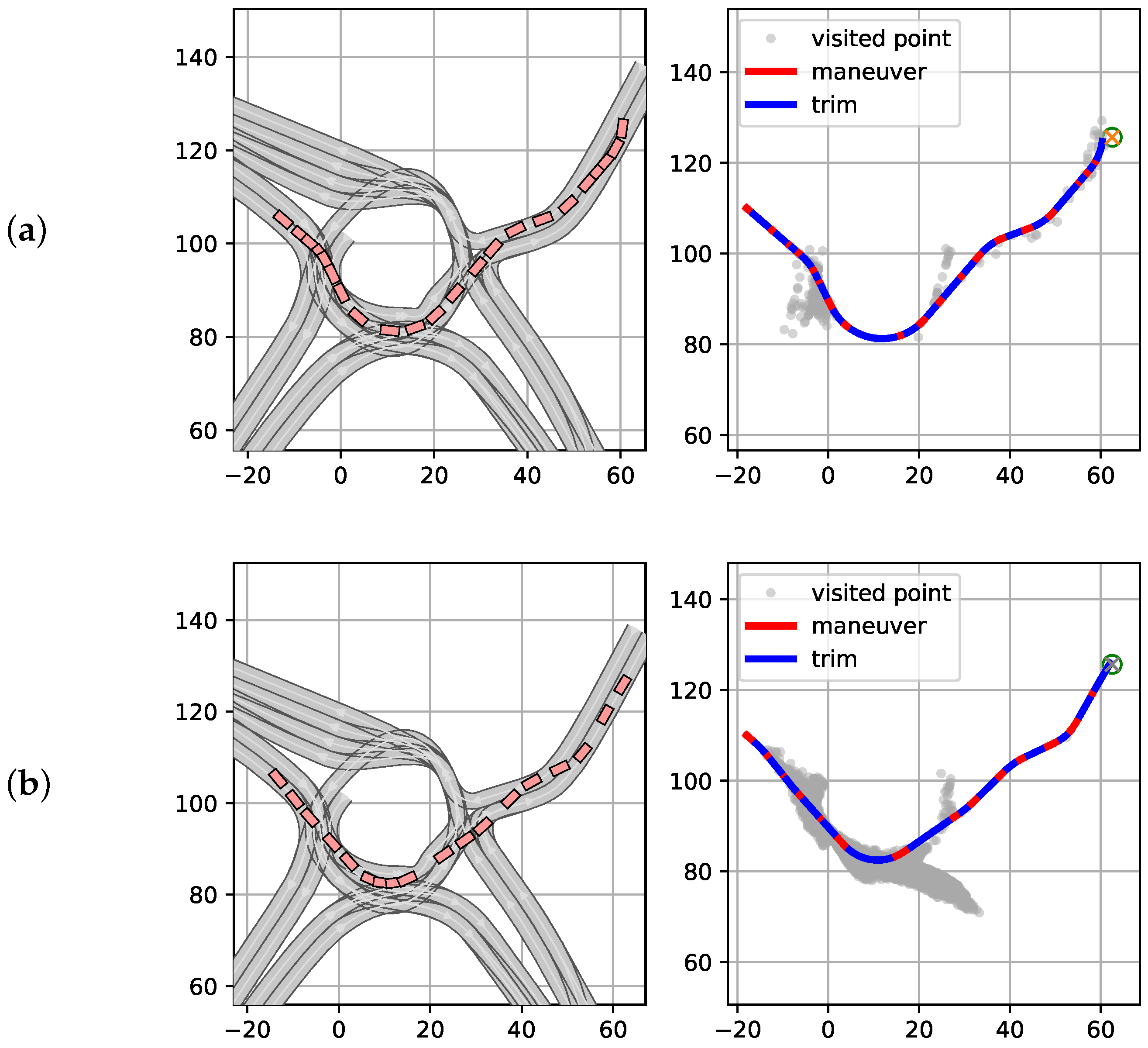
4.3.4. Computation of Maneuvers
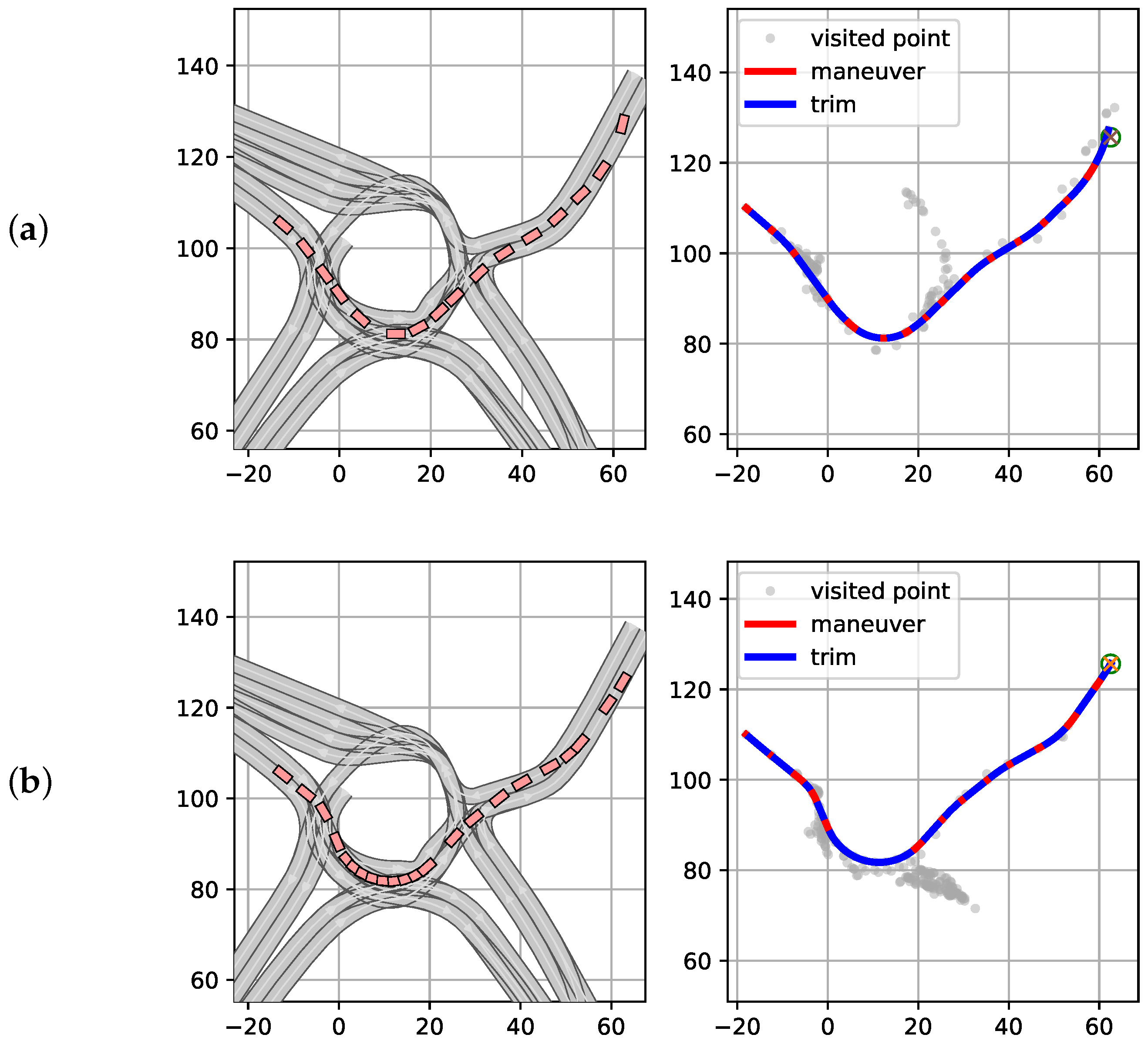
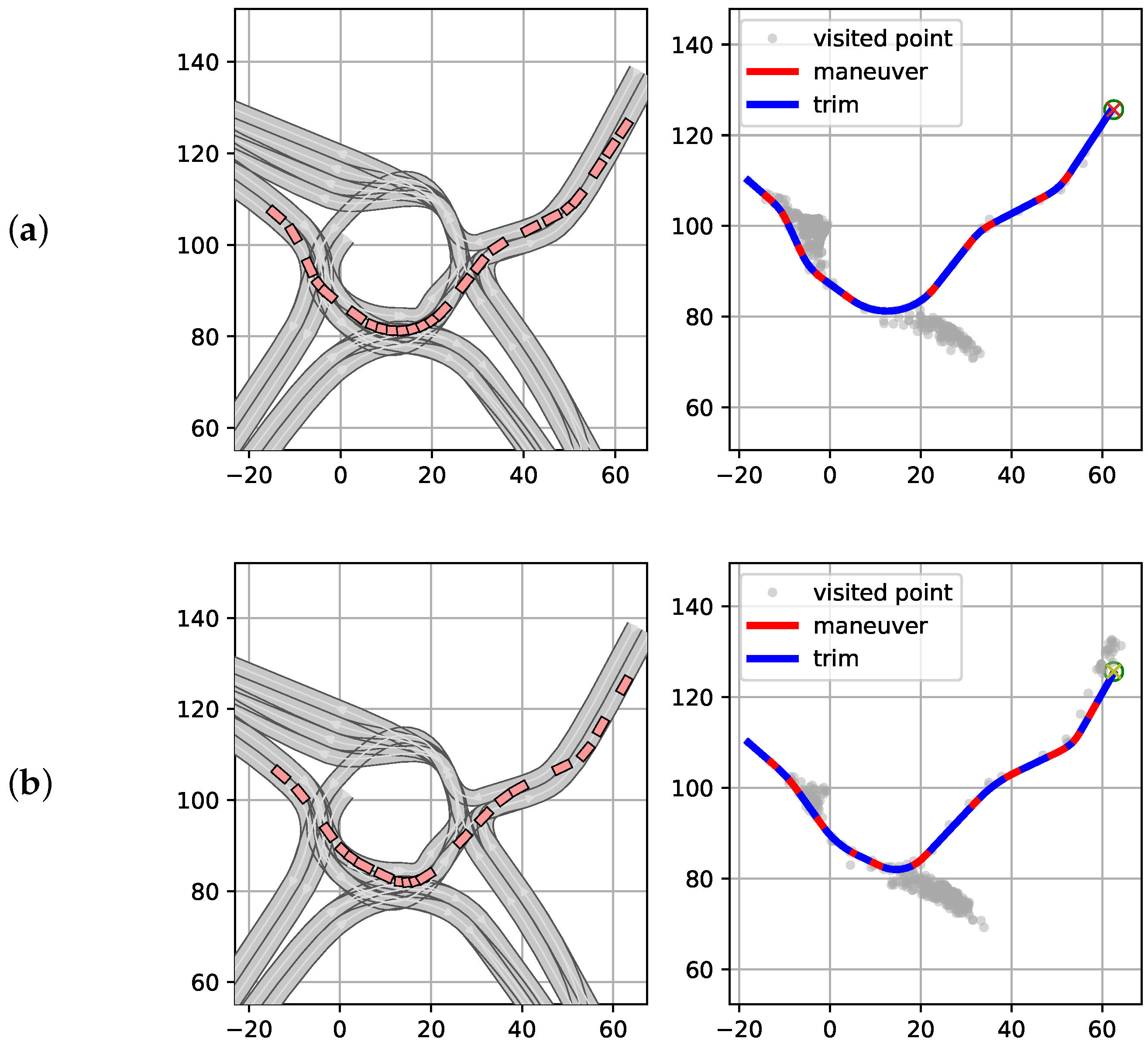
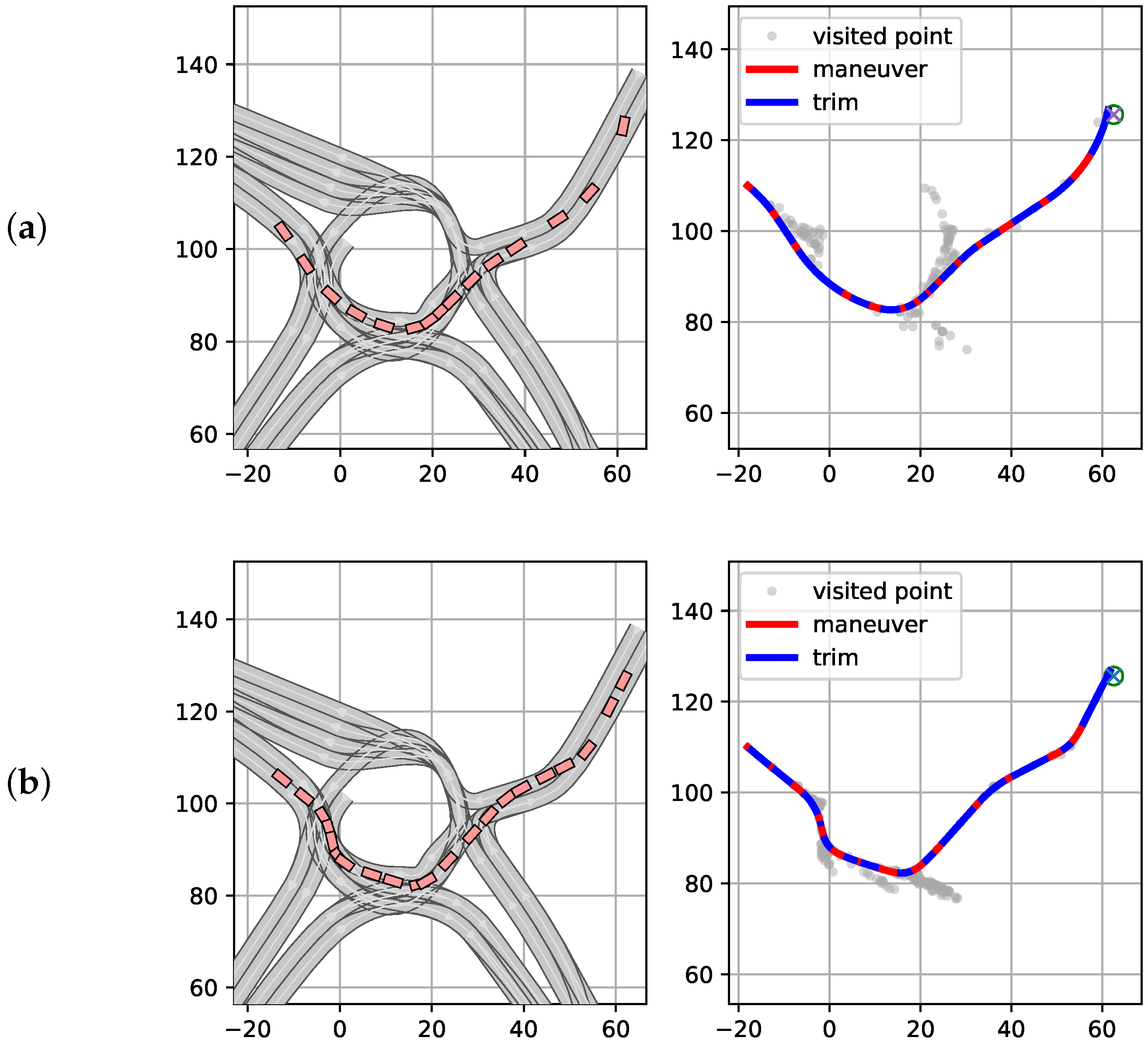
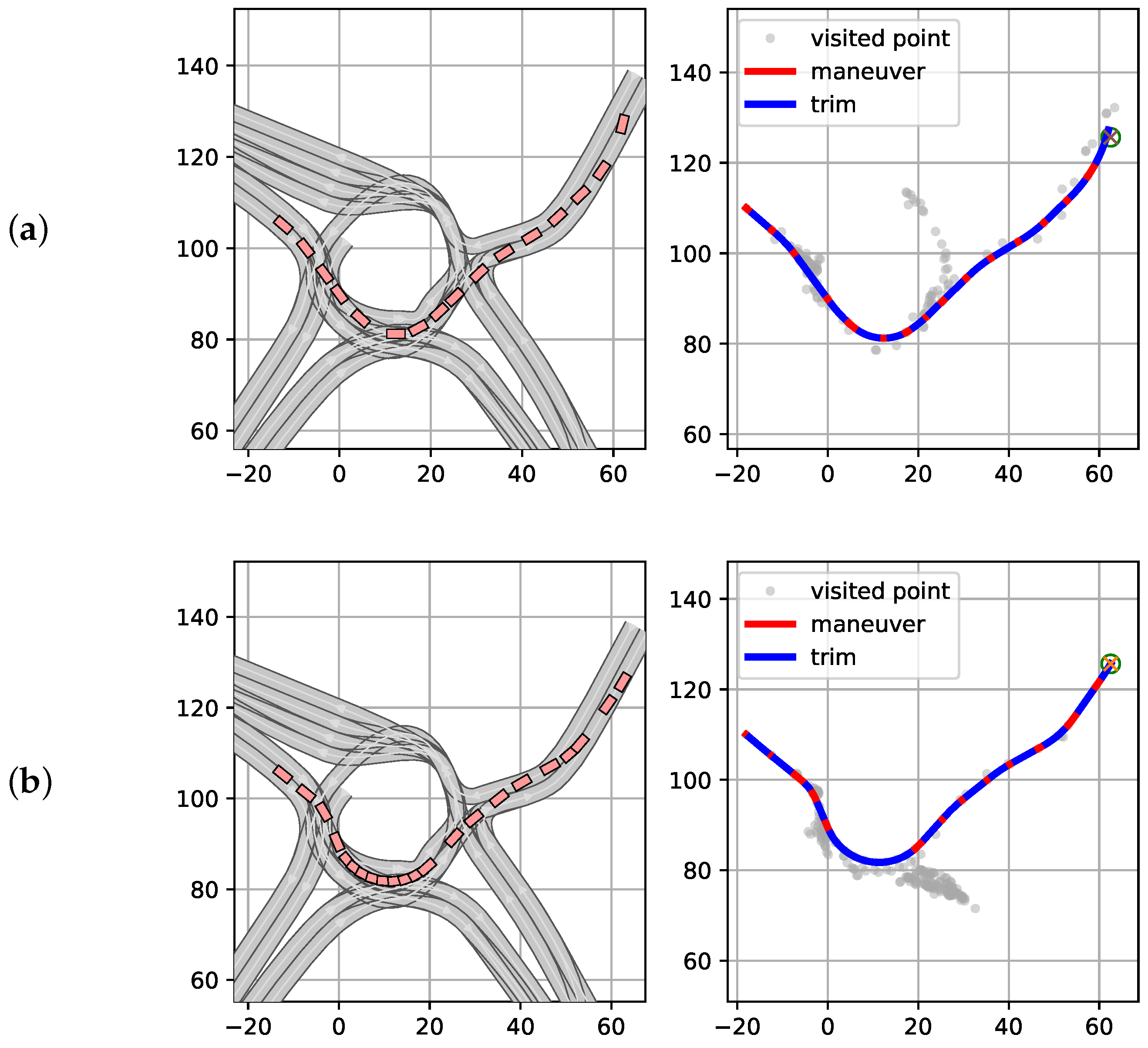
4.4. Validation of the Automata
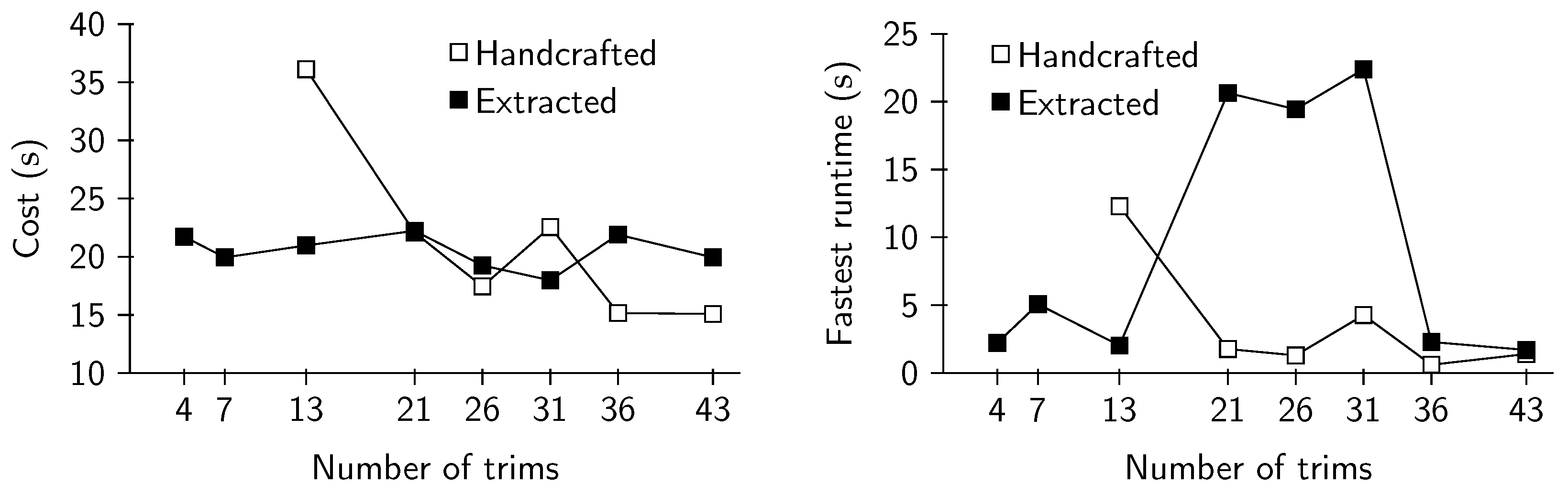
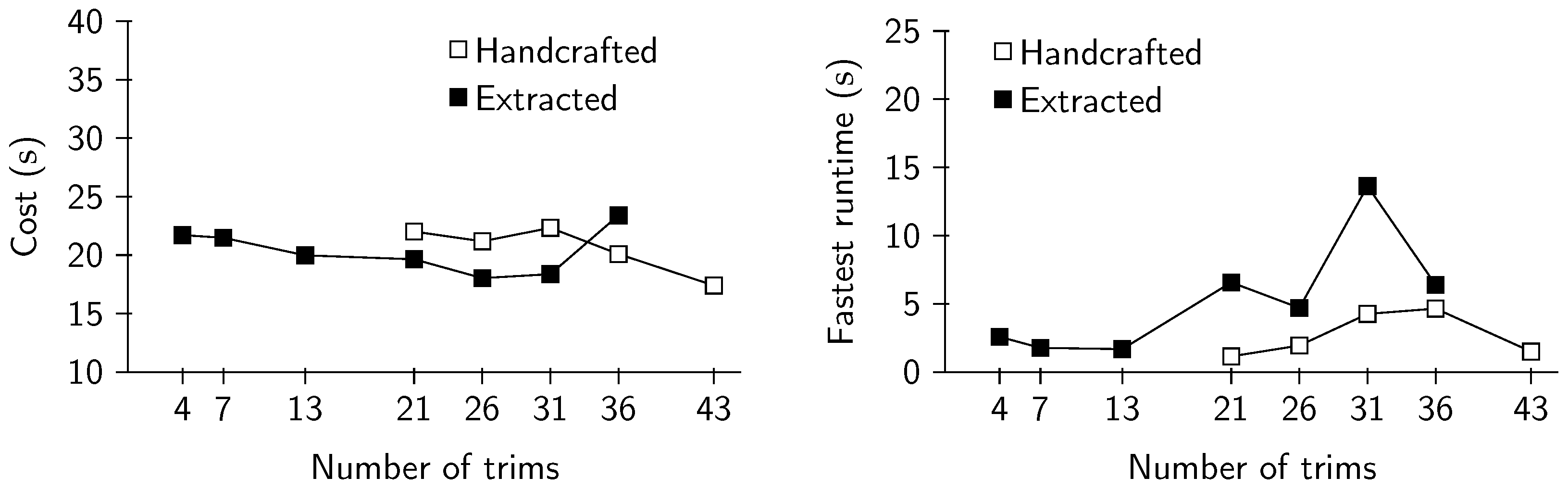
4.5. Evaluation in Simulation and Discussion
- The trajectory’s duration as the cost for the search;
- Fixed trim’s duration of ;
- Timeout of 60 ;
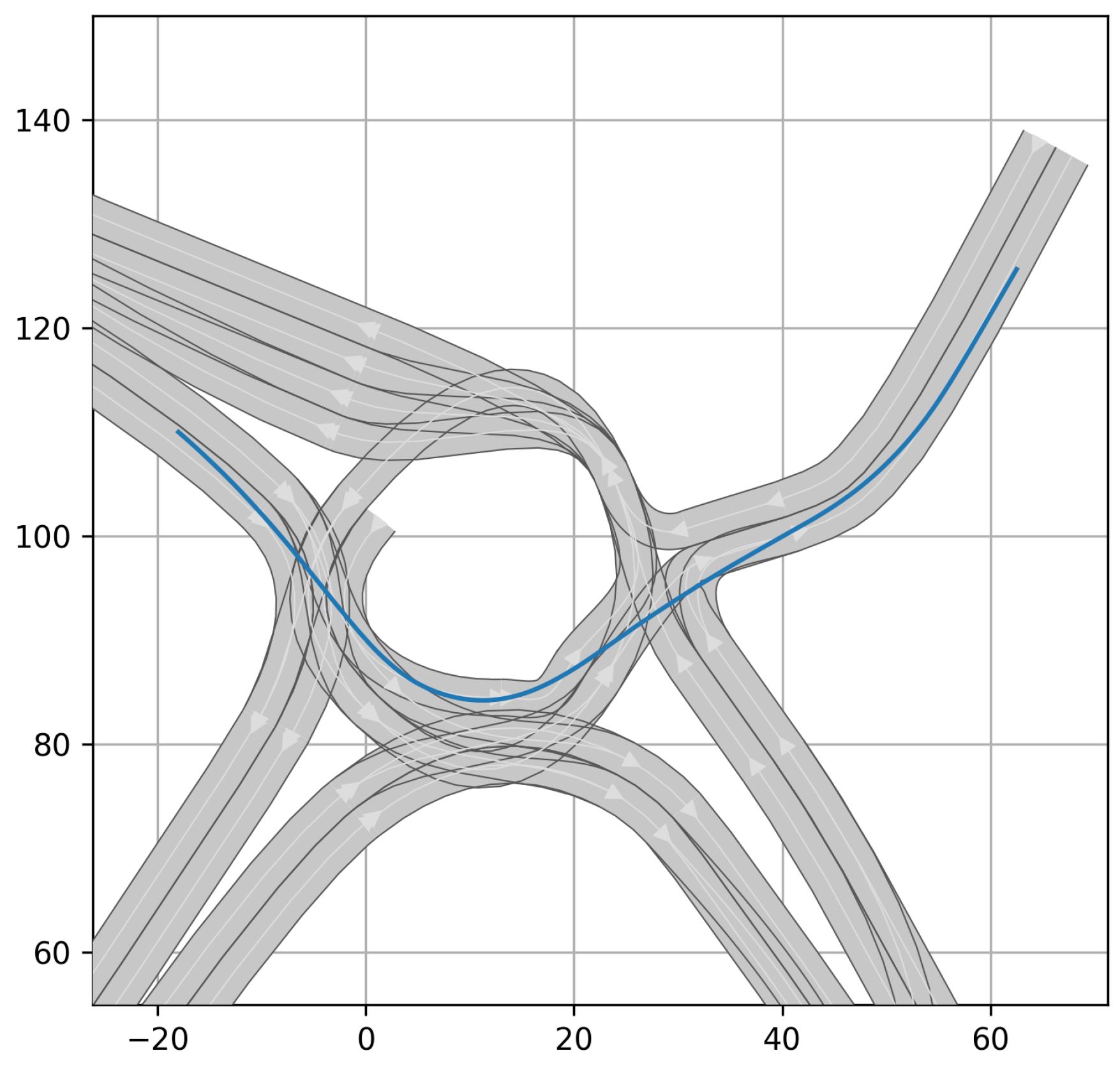
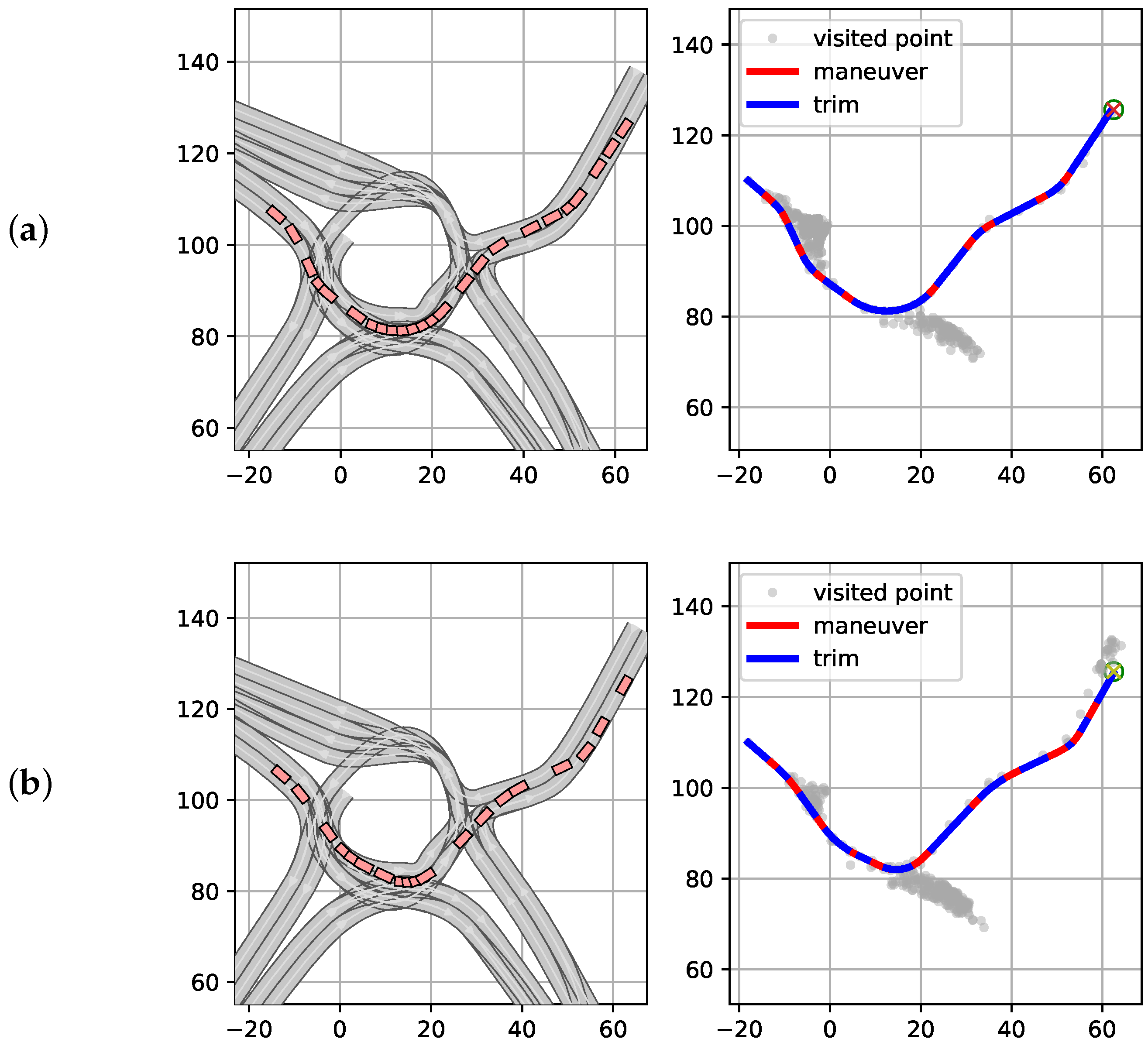
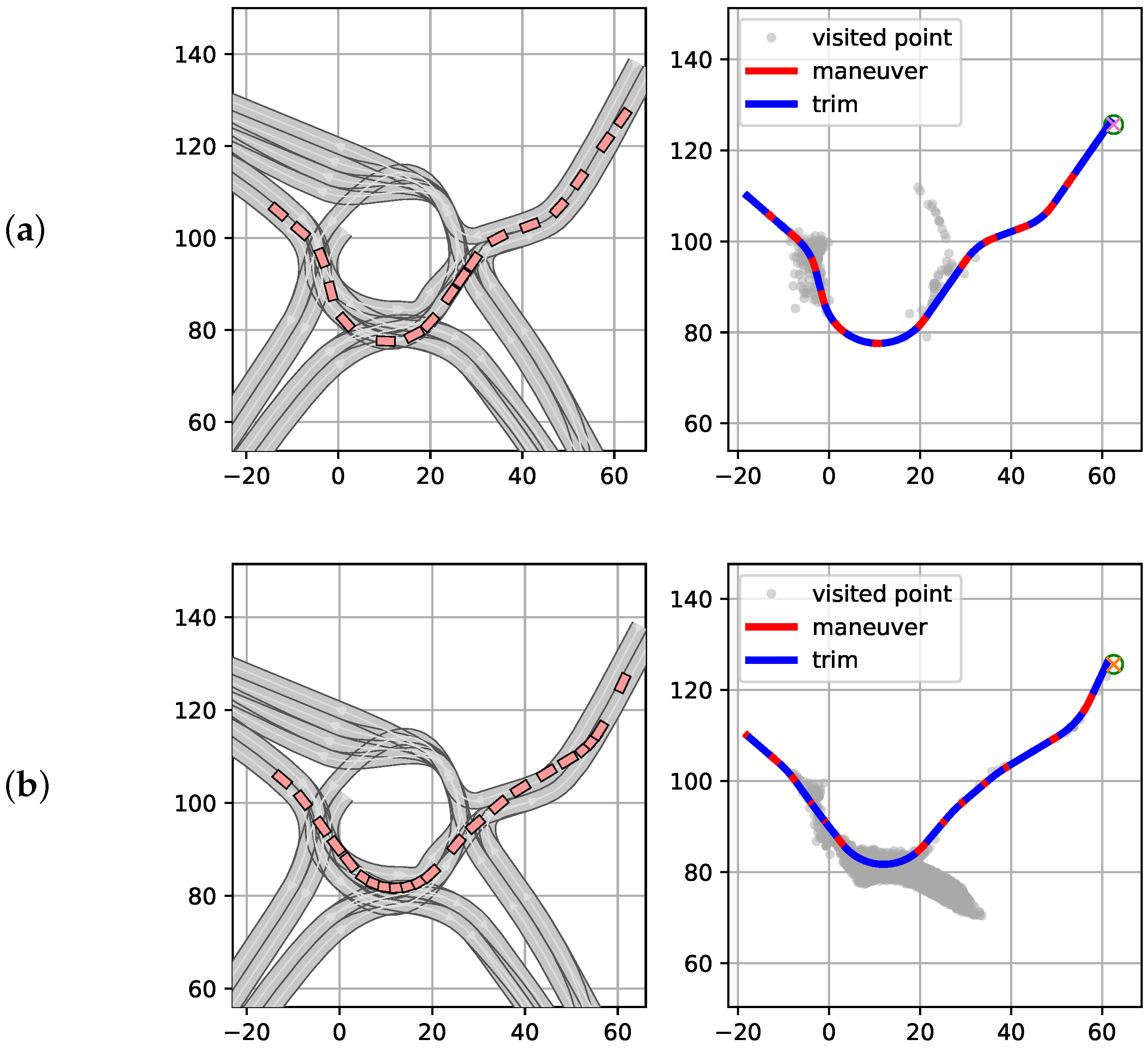
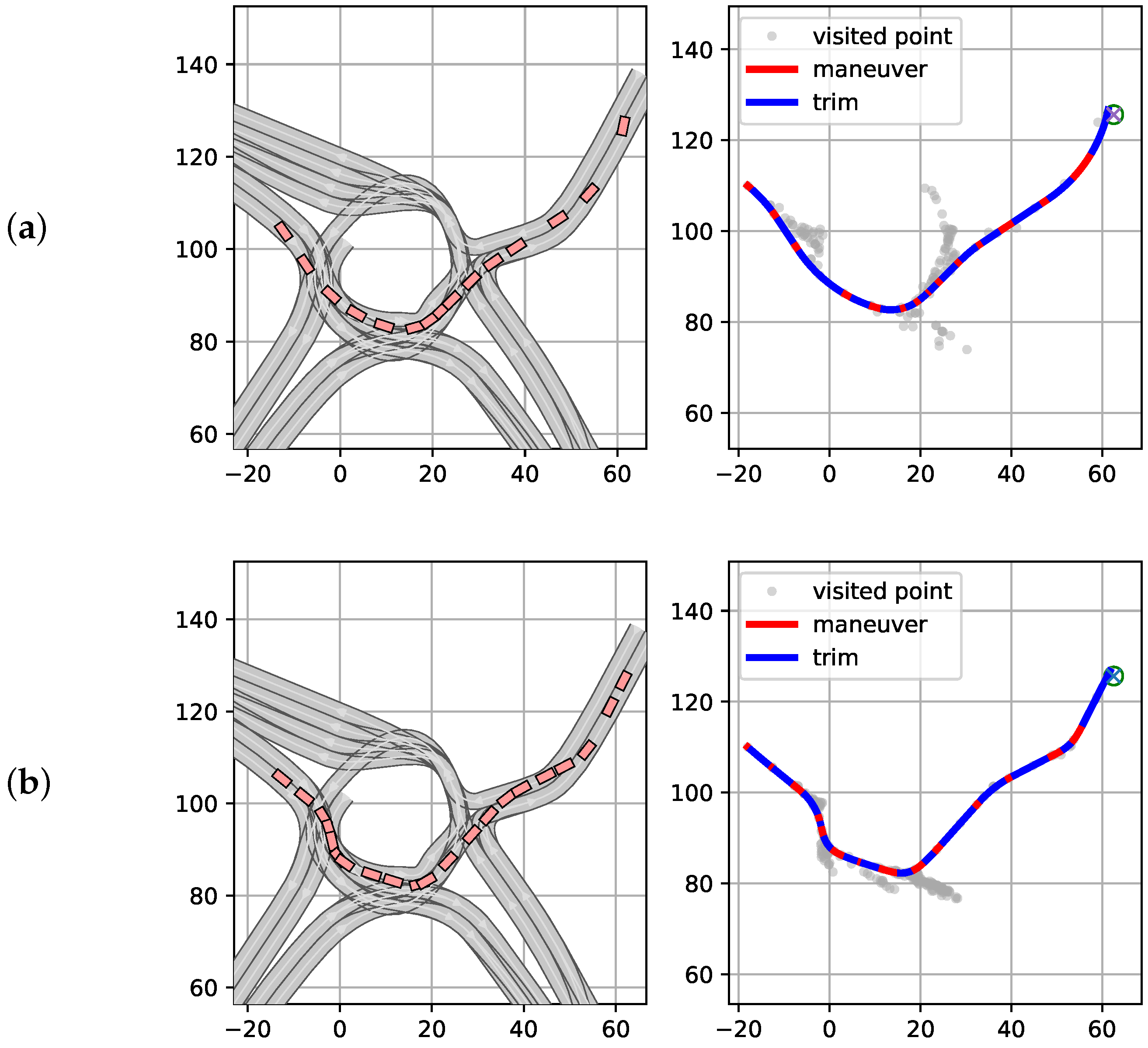
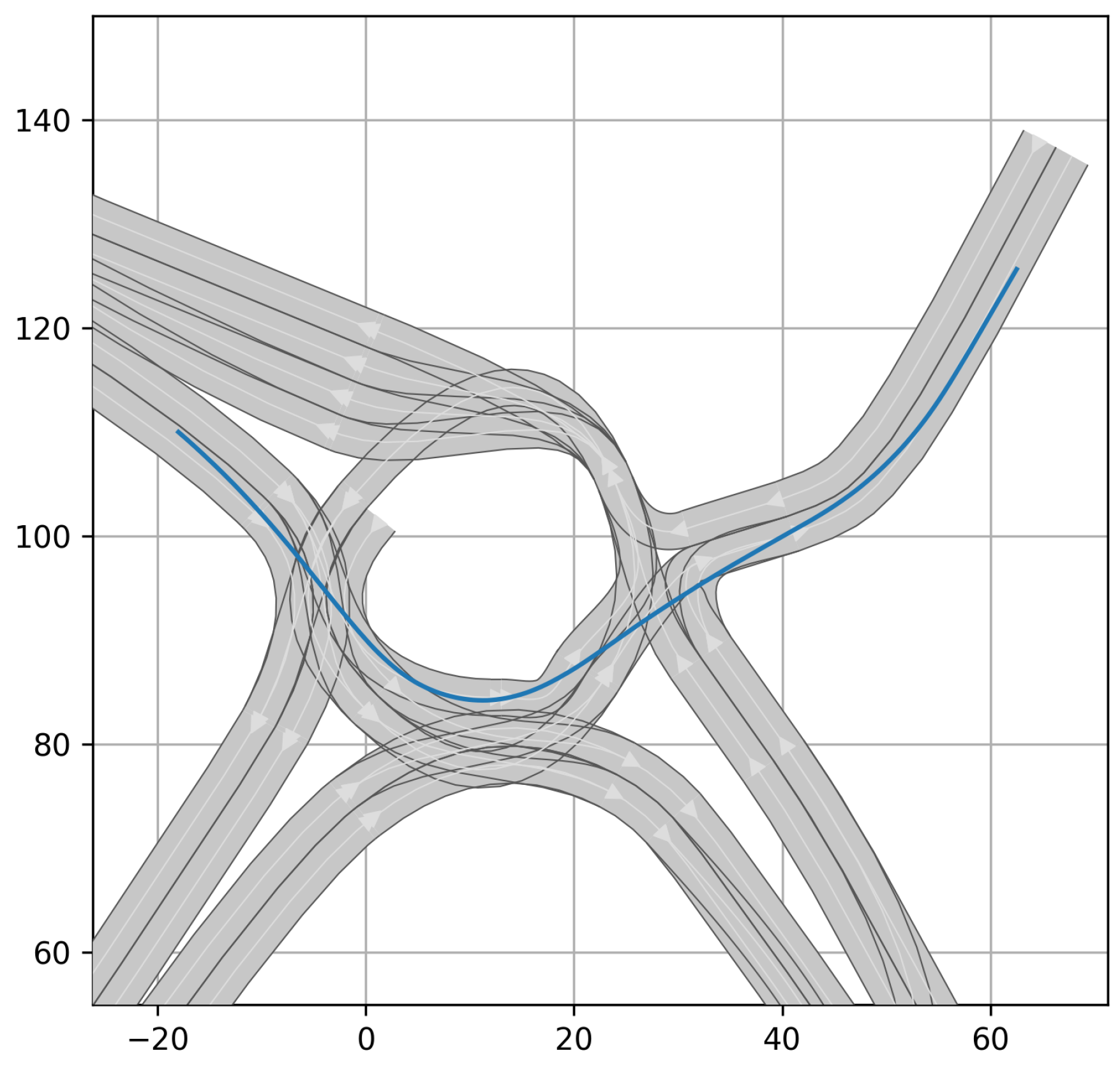
- As mentioned previously in Section 4.4, the initial and goal pose were extracted from the data’s trajectory depicted in Figure 7, and the vehicle is initially stopped;
- Goal region as the circle with radius of 2 centered in the goal position;
- Optimization region in a radius of 30 from the goal;
- The inflation factor and heuristics were the same as in [4].
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Acronyms
| DMP | dynamic motion primitives |
| MA | maneuver automaton |
| MP | motion primitives |
| OCP | optimal control problem |
| ∏* | Optimized Primitives |
Appendix A. Proof of Proposition 2
References
- Udrescu, S.M.; Tegmark, M. AI Feynman: A physics-inspired method for symbolic regression. Sci. Adv. 2020, 6, eaay2631. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Raissi, M.; Perdikaris, P.; Karniadakis, G. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Brunton, S.L.; Proctor, J.L.; Kutz, J.N. Discovering governing equations from data by sparse identification of nonlinear dynamical systems. Proc. Natl. Acad. Sci. USA 2016, 113, 3932–3937. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pedrosa, M.V.A.; Schneider, T.; Flaßkamp, K. Graph-based Motion Planning with Primitives in a Continuous State Space Search. In Proceedings of the 2021 6th International Conference on Mechanical Engineering and Robotics Research (ICMERR), Krakow, Poland, 11–13 December 2021; pp. 30–39. [Google Scholar] [CrossRef]
- Flaßkamp, K.; Ober-Blöbaum, S.; Peitz, S. Symmetry in Optimal Control: A Multiobjective Model Predictive Control Approach. In Proceedings of the Advances in Dynamics, Optimization and Computation, Paderborn, Germany, 28 September–2 October 2020; Junge, O., Schütze, O., Froyland, G., Ober-Blöbaum, S., Padberg-Gehle, K., Eds.; Springer International Publishing: Cham, Switerland, 2020; pp. 209–237. [Google Scholar]
- Frazzoli, E.; Dahleh, M.; Feron, E. Maneuver-based motion planning for nonlinear systems with symmetries. IEEE Trans. Robot. 2005, 21, 1077–1091. [Google Scholar] [CrossRef]
- Flaßkamp, K.; Ober-Blöbaum, S.; Kobilarov, M. Solving Optimal Control Problems by Exploiting Inherent Dynamical Systems Structures. J. Nonlinear Sci. 2012, 22, 599–629. [Google Scholar] [CrossRef]
- Flaßkamp, K.; Ober-Blöbaum, S.; Worthmann, K. Symmetry and motion primitives in model predictive control. Math. Control. Signals Syst. 2019, 31, 455–485. [Google Scholar] [CrossRef] [Green Version]
- Lüttgens, L.; Jurgelucks, B.; Wernsing, H.; Roy, S.; Büskens, C.; Flaßkamp, K. Autonomous navigation of ships by combining optimal trajectory planning with informed graph search. Math. Comput. Model. Dyn. Syst. 2022, 28, 1–27. [Google Scholar] [CrossRef]
- Abbeel, P.; Coates, A.; Ng, A.Y. Autonomous helicopter aerobatics through apprenticeship learning. Int. J. Robot. Res. 2010, 29, 1608–1639. [Google Scholar] [CrossRef]
- Wang, B.; Gong, J.; Chen, H. Motion Primitives Representation, Extraction and Connection for Automated Vehicle Motion Planning Applications. IEEE Trans. Intell. Transp. Syst. 2020, 21, 3931–3945. [Google Scholar] [CrossRef]
- Goddard, Z.C.; Wardlaw, K.; Krishnan, R.; Tsiotras, P.; Smith, M.R.; Sena, M.R.; Parish, J.J.; Mazumdar, A. Utilizing Reinforcement Learning to Continuously Improve a Primitive-Based Motion Planner. In Proceedings of the AIAA Scitech 2021 Forum, Washington, DC, USA, 11–15 January 2021; p. 1752. [Google Scholar]
- Li, J.; Li, Z.; Li, X.; Feng, Y.; Hu, Y.; Xu, B. Skill Learning Strategy Based on Dynamic Motion Primitives for Human–Robot Cooperative Manipulation. IEEE Trans. Cogn. Dev. Syst. 2021, 13, 105–117. [Google Scholar] [CrossRef]
- Schaal, S. Dynamic Movement Primitives -A Framework for Motor Control in Humans and Humanoid Robotics. In Adaptive Motion of Animals and Machines; Springer: Tokyo, Japan, 2006. [Google Scholar]
- Pastor, P.; Hoffmann, H.; Asfour, T.; Schaal, S. Learning and generalization of motor skills by learning from demonstration. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 763–768. [Google Scholar] [CrossRef]
- Silver, D.; Bagnell, J.A.D.; Stentz, A.T. Learning Autonomous Driving Styles and Maneuvers from Expert Demonstration. In Proceedings of the 13th International Symposium on Experimental Robotics (ISER ’12), La Valletta, Malta, 9–12 November 2012; pp. 371–386. [Google Scholar]
- Kulić, D.; Ott, C.; Lee, D.; Ishikawa, J.; Nakamura, Y. Incremental learning of full body motion primitives and their sequencing through human motion observation. Int. J. Robot. Res. 2012, 31, 330–345. [Google Scholar] [CrossRef] [Green Version]
- Deng, M.; Li, Z.; Kang, Y.; Chen, C.L.P.; Chu, X. A Learning-Based Hierarchical Control Scheme for an Exoskeleton Robot in Human–Robot Cooperative Manipulation. IEEE Trans. Cybern. 2020, 50, 112–125. [Google Scholar] [CrossRef]
- Paraschos, A.; Daniel, C.; Peters, J.R.; Neumann, G. Probabilistic movement primitives. Adv. Neural Inf. Process. Syst. 2013, 26, 1–9. [Google Scholar]
- Huang, Y.; Rozo, L.; Silvério, J.; Caldwell, D.G. Kernelized movement primitives. Int. J. Robot. Res. 2019, 38, 833–852. [Google Scholar] [CrossRef] [Green Version]
- Deng, N.; Cui, Y.; Zhang, S.; Li, H. Autonomous Vehicle Motion Planning using Kernelized Movement Primitives. In Proceedings of the 2021 International Symposium on Networks, Computers and Communications (ISNCC), Dubai, United Arab Emirates, 31 October–2 November 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Ijspeert, A.J.; Nakanishi, J.; Hoffmann, H.; Pastor, P.; Schaal, S. Dynamical Movement Primitives: Learning Attractor Models for Motor Behaviors. Neural Comput. 2013, 25, 328–373. [Google Scholar] [CrossRef] [Green Version]
- Pastor, P.; Kalakrishnan, M.; Meier, F.; Stulp, F.; Buchli, J.; Theodorou, E.; Schaal, S. From dynamic movement primitives to associative skill memories. Robot. Auton. Syst. 2013, 61, 351–361. [Google Scholar] [CrossRef]
- Zhang, R.; Cao, S.; Zhao, K.; Yu, H.; Hu, Y. A Hybrid-Driven Optimization Framework for Fixed-Wing UAV Maneuvering Flight Planning. Electronics 2021, 10, 2330. [Google Scholar] [CrossRef]
- Dubins, L.E. On curves of minimal length with a constraint on average curvature, and with prescribed initial and terminal positions and tangents. Am. J. Math. 1957, 79, 497–516. [Google Scholar] [CrossRef]
- Reeds, J.; Shepp, L. Optimal paths for a car that goes both forwards and backwards. Pac. J. Math. 1990, 145, 367–393. [Google Scholar] [CrossRef] [Green Version]
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Wang, W.; Xi, J.; Zhao, D. Driving Style Analysis Using Primitive Driving Patterns With Bayesian Nonparametric Approaches. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2986–2998. [Google Scholar] [CrossRef] [Green Version]
- Bender, A.; Agamennoni, G.; Ward, J.R.; Worrall, S.; Nebot, E.M. An Unsupervised Approach for Inferring Driver Behavior From Naturalistic Driving Data. IEEE Trans. Intell. Transp. Syst. 2015, 16, 3325–3336. [Google Scholar] [CrossRef]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. Correction to “A Formal Basis for the Heuristic Determination of Minimum Cost Paths”. SIGART Newsl. 1972, 37, 28–29. [Google Scholar] [CrossRef]
- Russell, S.; Norvig, P. Artificial Intelligence: A Modern Approach, 3rd ed.; Prentice Hall: Hoboken, NJ, USA, 2010. [Google Scholar]
- Dolgov, D.; Thrun, S.; Montemerlo, M.; Diebel, J. Practical search techniques in path planning for autonomous driving. Ann Arbor 2008, 1001, 18–80. [Google Scholar]
- Petereit, J.; Emter, T.; Frey, C.W.; Kopfstedt, T.; Beutel, A. Application of Hybrid A* to an Autonomous Mobile Robot for Path Planning in Unstructured Outdoor Environments. In Proceedings of the ROBOTIK 2012, 7th German Conference on Robotics, Munich, Germany, 21–22 May 2012; pp. 1–6. [Google Scholar]
- Scheffe, P.; de Andrade Pedrosa, M.V.; Flaßkamp, K.; Alrifaee, B. Receding Horizon Control Using Graph Search for Multi-Agent Trajectory Planning. TechRxiv 2021. preprint. [Google Scholar] [CrossRef]
- Golubitsky, M.; Stewart, I. The Symmetry Perspective: From Equilibrium to Chaos in Phase Space and Physical Space, 1st ed.; Progress in Mathematics, Birkhäuser Verlag; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2002. [Google Scholar]
- Marsden, J.E.; Ratiu, T.S. Introduction to mechanics and symmetry. In Texts in Applied Mathematics, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 1999; Volume 17. [Google Scholar]
- Marsden, J.E. Lectures Notes on Mechanics; London Mathematical Society Lecture Note Series; Cambridge University Press: Cambridge, UK, 1992; Volume 174. [Google Scholar]
- Flaßkamp, K. On the Optimal Control of Mechanical Systems—Hybrid Control Strategies and Hybrid Dynamics. Ph.D. Thesis, University of Paderborn, Paderborn, Germany, 2013. [Google Scholar]
- Frazzoli, E.; Dahleh, M.; Feron, E. A hybrid control architecture for aggressive maneuvering of autonomous helicopters. In Proceedings of the 38th IEEE Conference on Decision and Control, Phoenix, AZ, USA, 7–10 December 1999; pp. 2471–2476. [Google Scholar] [CrossRef]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- Kobilarov, M. Discrete Geometric Motion Control of Autonomous Vehicles. PhD Thesis, University of Southern California, Los Angeles, CA, USA, 2008. [Google Scholar]
- Mazumdar, A.; Goddard, Z. Automated Motion Libraries for Enhanced Data-Driven Intelligence: Fiscal Year 2019 Technical Report; Technical Report; Sandia National Lab. (SNL-NM): Albuquerque, NM, USA, 2019. [Google Scholar]
- Lloyd, S.P. Least squares quantization in pcm. IEEE Trans. Inf. Theory 1982, 28, 129–137. [Google Scholar] [CrossRef] [Green Version]
- Bishop, C.M. Pattern Recognition and Machine Learning (Information Science and Statistics); Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Macqueen, J. Some methods for classification and analysis of multivariate observations. In Proceedings of the 5th Berkeley Symposium on Mathematical Statistics and Probability, Berkeley, CA, USA, 27 December 1965–7 January 1966; pp. 281–297. [Google Scholar]
- Caesar, H.; Bankiti, V.; Lang, A.H.; Vora, S.; Liong, V.E.; Xu, Q.; Krishnan, A.; Pan, Y.; Baldan, G.; Beijbom, O. nuScenes: A multimodal dataset for autonomous driving. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 11621–11631. [Google Scholar]
- US Department of Transportation—FHWA. Next Generation Simulation (NGSIM). 2006. Available online: https://www.fhwa.dot.gov/publications/research/operations/its/06135/index.cfm (accessed on 25 February 2022).
- Strigel, E.; Meissner, D.; Seeliger, F.; Wilking, B.; Dietmayer, K. The ko-per intersection laserscanner and video dataset. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1900–1901. [Google Scholar]
- Althoff, M.; Koschi, M.; Manzinger, S. CommonRoad: Composable benchmarks for motion planning on roads. In Proceedings of the IEEE Intelligent Vehicles Symposium, Los Angeles, CA, USA, 11–14 June 2017. [Google Scholar] [CrossRef] [Green Version]
- Renault Zoe Dimensions & Specifications. Available online: https://www.renault.co.uk/electric-vehicles/zoe/specifications.html (accessed on 25 February 2022).
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Arthur, D.; Vassilvitskii, S. K-Means++: The Advantages of Careful Seeding. In Proceedings of the Eighteenth Annual ACM-SIAM Symposium on Discrete Algorithms, SODA’07, New Orleans, LA, USA,, 7–9 January 2007; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2007; pp. 1027–1035. [Google Scholar]
- Althoff, M.; Urban, S.; Koschi, M. Automatic Conversion of Road Networks from OpenDRIVE to Lanelets. In Proceedings of the IEEE International Conference on Service Operations and Logistics, and Informatics, Singapore, 31 July–2 August 2018. [Google Scholar]
- Maierhofer, S.; Klischat, M.; Althoff, M. CommonRoad Scenario Designer: An Open-Source Toolbox for Map Conversion and Scenario Creation for Autonomous Vehicles. In Proceedings of the IEEE International Conference on Intelligent Transportation Systems, Indianapolis, IN, USA, 19–22 September 2021; pp. 3176–3182. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Param. | Value | Param. | Value | Param. | Value |
|---|---|---|---|---|---|
| −11.5 m | −0.4 | −0.91 | |||
| 11.5 m | 0.4 | 0.91 | |||
| −13.9 m | 45.8 m | 4.755 m |
| Type | Trims | Maneuvers | Cost (s) | Runtime (s) |
|---|---|---|---|---|
| Handcrafted | 4 | 10 | – | |
| Extracted | 4 | 14 | ||
| Handcrafted | 7 | 23 | – | |
| Extracted | 7 | 27 | ||
| Handcrafted | 13 | 49 | ||
| Extracted | 13 | 53 | ||
| Handcrafted | 21 | 85 | ||
| Extracted | 21 | 85 | ||
| Handcrafted | 26 | 108 | ||
| Extracted | 26 | 106 | ||
| Handcrafted | 31 | 131 | ||
| Extracted | 31 | 129 | ||
| Handcrafted | 36 | 154 | ||
| Extracted | 36 | 151 | ||
| Handcrafted | 43 | 187 | ||
| Extracted | 43 | 174 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pedrosa, M.V.A.; Schneider, T.; Flaßkamp, K. Learning Motion Primitives Automata for Autonomous Driving Applications. Math. Comput. Appl. 2022, 27, 54. https://doi.org/10.3390/mca27040054
Pedrosa MVA, Schneider T, Flaßkamp K. Learning Motion Primitives Automata for Autonomous Driving Applications. Mathematical and Computational Applications. 2022; 27(4):54. https://doi.org/10.3390/mca27040054
Chicago/Turabian StylePedrosa, Matheus V. A., Tristan Schneider, and Kathrin Flaßkamp. 2022. "Learning Motion Primitives Automata for Autonomous Driving Applications" Mathematical and Computational Applications 27, no. 4: 54. https://doi.org/10.3390/mca27040054
APA StylePedrosa, M. V. A., Schneider, T., & Flaßkamp, K. (2022). Learning Motion Primitives Automata for Autonomous Driving Applications. Mathematical and Computational Applications, 27(4), 54. https://doi.org/10.3390/mca27040054