Univariate Theory of Functional Connections Applied to Component Constraints †



Abstract
1. Introduction
- solutions are approximate and analytical (this allows easier subsequent analysis and further manipulation);
- the approach solves initial, boundary, or multi-value problems by the same unified procedure;
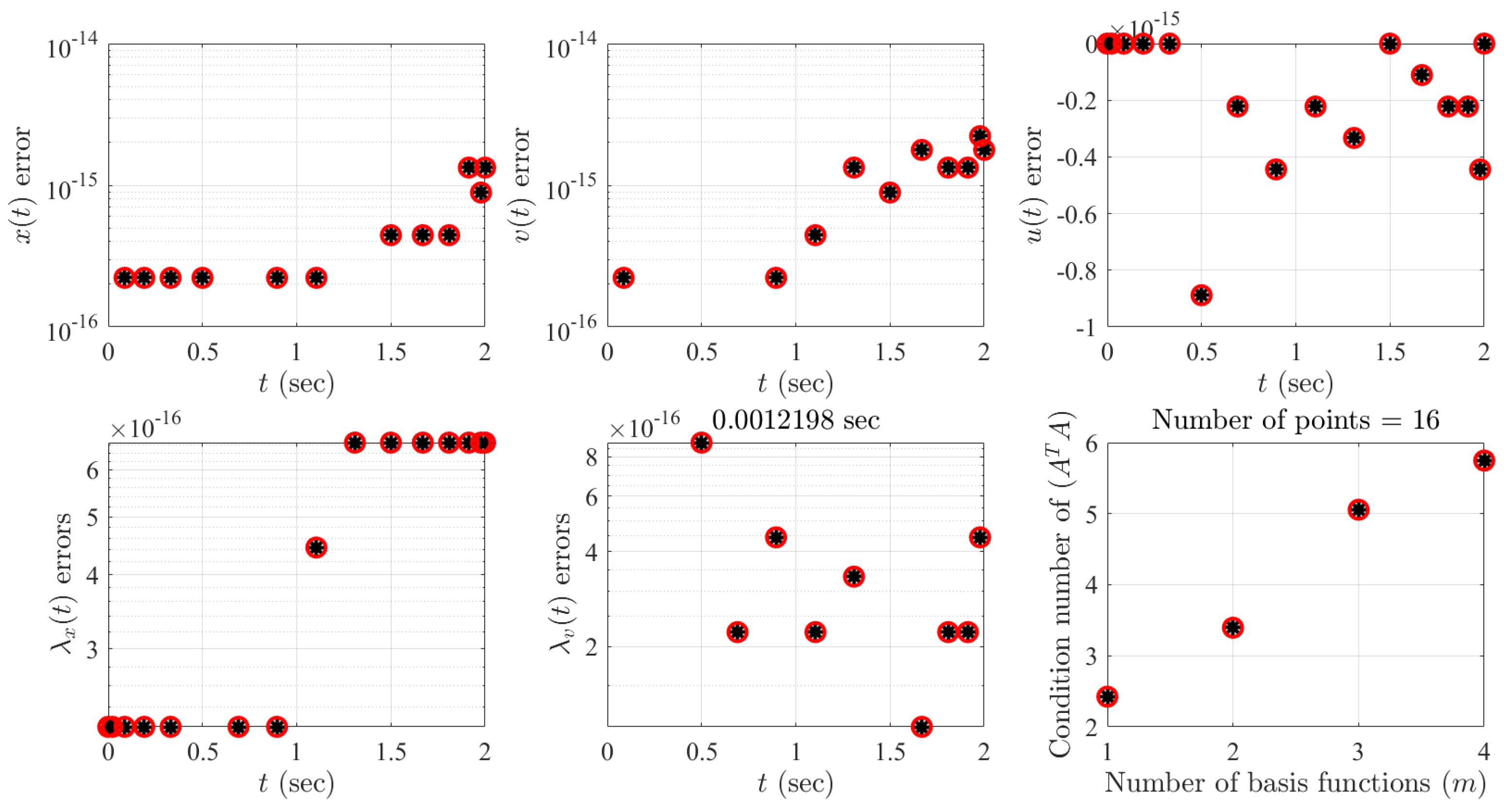
- the approach is numerically robust (low condition number);
- solutions are usually provided at machine error accuracy;
- solutions are usually obtained at msec level (suitable for real-time applications); and
- constraint range is independent from the integration range (solution accuracy is maintained outside the constraints range).
2. Summary of Univariate Theory of Functional Connections
Example
3. Correct Functionals for the Component Constraints Previously Provided
3.1. Two Absolute Constraints
3.2. One Absolute and One Relative Constraints
- Case (1)
- wheresubject to and .
- Case (2)
- wheresubject to and .
3.3. Two Relative Constraints
- Case (1)
- wheresubject to and .
- Case (2)
- wheresubject to .
- Case (3)
- wheresubject to .
4. Univariate Theory of Functional Connections Subject to Component Constraints
- 1.
- The component appears in constraints whose indices are the elements of the vector of integers, . For instance, if the component appears in the constraint equations identified as “2”, “9”, and “19”, only, then and , which is the length of the vector.
- 2.
- The constrained expression of the component is made of a sum of the free function and a linear combination of functional coefficients, and linearly independent support functions, ,
Application to a Simple Example of Optimal Control Problem
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mortari, D. The Theory of Connections: Connecting Points. Mathematics 2017, 5, 57. [Google Scholar] [CrossRef]
- Mortari, D. The Theory of Functional Connections: Connecting Functions. In Proceedings of the IAA-AAS-SciTech-072, Forum 2018, Peoples’ Friendship University of Russia, Moscow, Russia, 13–15 November 2018. [Google Scholar]
- Mortari, D.; Leake, C. The Multivariate Theory of Connections. Mathematics 2019, 7, 296. [Google Scholar] [CrossRef] [PubMed]
- Leake, C.; Johnston, H.; Mortari, D. The Multivariate Theory of Functional Connections: Theory, Proofs, and Application in Partial Differential Equations. Mathematics 2020, 8, 1303. [Google Scholar] [CrossRef]
- Leake, C.; Mortari, D. An Explanation and Implementation of the Multivariate Theory of Functional Connections via Examples. In Proceedings of the 2019 AAS/AIAA Astrodynamics Specialist Conference, Portland, ME, USA, 11–15 August 2019. [Google Scholar]
- Johnston, H.; Leake, C.; Mortari, D. An Analysis of the Theory of Functional Connections Subject to Inequality Constraints. In Proceedings of the 2019 AAS/AIAA Astrodynamics Specialist Conference, Portland, ME, USA, 11–15 August 2019. [Google Scholar]
- Mortari, D.; Arnas, D. Bijective Mapping Analysis to Extend the Theory of Functional Connections to Non-Rectangular 2-Dimensional Domains. Mathematics 2020, 8, 1593. [Google Scholar] [CrossRef] [PubMed]
- Mortari, D. Least-Squares Solution of Linear Differential Equations. Mathematics 2017, 5, 48. [Google Scholar] [CrossRef]
- Johnston, H.; Mortari, D. Linear Differential Equations Subject to Relative, Integral, and Infinite Constraints. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, 2018, 167, AAS 18-273, Snowbird, UT, USA, 19–23 August 2018; pp. 3107–3121. [Google Scholar]
- Mortari, D.; Johnston, H.; Smith, L. High accuracy least-squares solutions of nonlinear differential equations. J. Comput. Appl. Math. 2019, 352, 293–307. [Google Scholar] [CrossRef] [PubMed]
- Johnston, H.; Mortari, D. Weighted Least-Squares Solutions of Over-Constrained Differential Equations. In Proceedings of the IAA-AAS-SciTech-081, Forum 2018, Peoples’ Friendship University of Russia, Moscow, Russia, 13–15 November 2018. [Google Scholar]
- Mortari, D.; Furfaro, R. Theory of Connections Applied to First-Order System of Ordinary Differential Equations Subject to Component Constraints. In Proceedings of the 2018 AAS/AIAA Astrodynamics Specialist Conference, Snowbird, UT, USA, 19–23 August 2018. [Google Scholar]
- Schiassi, E.; Furfaro, R.; Leake, C.; De Florio, M.; Johnston, H.; Mortari, D. Extreme Theory of Functional Connections: A Fast Physics-Informed Neural Network Method for Solving Ordinary and Partial Differential Equations. Neurocomputing 2020. Submitted revised version. [Google Scholar]
- Leake, C.; Johnston, H.; Smith, L.; Mortari, D. Analytically Embedding Differential Equation Constraints into Least-Squares Support Vector Machines using the Theory of Functional Connections. Mach. Learn. Knowl. Extr. 2019, 1, 60. [Google Scholar] [CrossRef] [PubMed]
- Johnston, H.; Mortari, D. Least-squares Solutions of Boundary-value Problems in Hybrid Systems. arXiv 2019, arXiv:1911.04390v1. [Google Scholar]
- Leake, C.; Mortari, D. Deep Theory of Functional Connections: A New Method for Estimating the Solutions of Partial Differential Equations. Mach. Learn. Knowl. Extr. 2020, 2, 4. [Google Scholar] [CrossRef] [PubMed]
- Mai, T.; Mortari, D. Theory of Functional Connections Applied to Nonlinear Programming under Equality Constraints. In Proceedings of the 2019 AAS/AIAA Astrodynamics Specialist Conference, Portland, ME, USA, 11–15 August 2019. [Google Scholar]
- Drozd, K.; Furfaro, R.; Mortari, D. Constrained Energy-Optimal Guidance in Relative Motion via Theory of Functional Connections and Rapidly-Explored Random Trees. In Proceedings of the 2019 Astrodynamics Specialist Conference, Portland, ME, USA, 11–15 August 2019. [Google Scholar]
- Furfaro, R.; Mortari, D. Least-squares Solution of a Class of Optimal Guidance Problems via Theory of Connections. ACTA Astronaut. 2020, 168, 92–103. [Google Scholar] [CrossRef]
- Furfaro, R.; Drozd, K.; Mortari, D. Energy-Optimal Rendezvous Spacecraft Guidance via Theory of Functional Connections. In Proceedings of the 70th International Astronautical Congress 2019, IAF Astrodynamics Symposium, Washington, DC, USA, 21–25 October 2019. [Google Scholar]
- Johnston, H.; Schiassi, E.; Furfaro, R.; Mortari, D. Fuel-Efficient Powered Descent Guidance on Large Planetary Bodies via Theory of Functional Connections. J. Astronaut. Sci. 2020, 67, 1521–1552. [Google Scholar] [CrossRef] [PubMed]
- Schiassi, E.; D’Ambrosio, A.; Johnston, H.; Furfaro, R.; Curti, F.; Mortari, D. Complete Energy Optimal Landing on Small and Large Planetary Bodies via Theory of Functional Connections. In Proceedings of the Astrodynamics Specialist Conference, AAS 20-557, Lake Tahoe, CA, USA, 9–13 August 2020. [Google Scholar]
- Furfaro, R.; Schiassi, E.; Drozd, K.; Mortari, D. Physics-Informed Neural Networks and Theory of Functional Connections for Optimal Space Guidance Applications. In Proceedings of the 71-st International Astronautical Congress (IAC 2020), Dubai, UAE, 12–16 October 2020. [Google Scholar]
- Schiassi, E.; D’Ambrosio, A.; Johnston, H.; De Florio, M.; Drozd, K.; Furfaro, R.; Curti, F.; Mortari, D. Physics-Informed Extreme Theory of Functional Connections Applied to Optimal Orbit Transfer. In Proceedings of the Astrodynamics Specialist Conference, Lake Tahoe, CA, USA, 9–13 August 2020. [Google Scholar]
- Johnston, H.; Mortari, D. The Theory of Connections Applied to Perturbed Lambert’s Problem. In Proceedings of the Astrodynamics Specialist Conference, Snowbird, UT, USA, 19–23 August 2018. [Google Scholar]
- Mortari, D. The Theory of Connections with Application. In Proceedings of the XVI Jornadas de Trabajo en Mecánica Celeste, Soria, Spain, 19–21 June 2017. [Google Scholar]
- Mortari, D. The Theory of Functional Connections: Current Status. In Proceedings of the XIX Colóquio Brasileiro de Dinâmica Orbital (CBDO-2018), Instituto Nacional de Pesquisas Espaciais, São José dos Campos, Brasil, 3–7 December 2018. [Google Scholar]
- Johnston, H.; Mortari, D. Orbit Propagation via the Theory of Functional Connections. In Proceedings of the Astrodynamics Specialist Conference, Portland, ME, USA, 11–15 August 2019. [Google Scholar]
- de Almeida, A.K., Jr.; Johnston, H.; Leake, C.; Mortari, D. Evaluation of Transfer Costs in the Earth-Moon System using the Theory of Functional Connections. In Proceedings of the Astrodynamics Specialist Conference, Lake Tahoe, CA, USA, 9–13 August 2020. [Google Scholar]
- Johnston, H.; Lo, M.; Mortari, D. Functional Interpolation Method to Compute Period Orbits in the Circular Restricted Three-Body Problem. In Proceedings of the Space Flight Mechanics Meeting, Virtual Conference, 1–4 February 2021. [Google Scholar]
- De Florio, M. Accurate Solutions of the Radiative Transfer Problem via Theory of Connections. Master’s Thesis, University of Bologna, Cesena, Italy, 2019. [Google Scholar]
- De Florio, M.; Schiassi, E.; Furfaro, R.; Ganapol, B.D.; Mostacci, D. Solutions of Chandrasekhar’s Basic Problem in Radiative Transfer via Theory of Functional Connections. J. Quant. Spectrosc. Radiat. Transf. 2021, 259, 107384. [Google Scholar] [CrossRef]
- Schiassi, E.; Leake, C.; De Florio, M.; Johnston, H.; Furfaro, R.; Mortari, D. Extreme Theory of Functional Connections: A Physics-Informed Neural Network Method for Solving Parametric Differential Equations. arXiv 2020, arXiv:2005.10632v1. [Google Scholar]
- Schiassi, E.; D’Ambrosio, A.; De Florio, M.; Furfaro, R.; Curti, F. Physics-Informed Extreme Theory of Functional Connections Applied to Data-Driven Parameters Discovery of Epidemiological Compartmental Models. arXiv 2020, arXiv:2008.05554v1. [Google Scholar]
- Hermes, H. Foundations of Optimal Control Theory; John Wiley: New York, NY, USA, 1968. [Google Scholar]


{kind=link}
| Selection | Requirement | |||
|---|---|---|---|---|
| 1 | 1 | t | 1 | 1 |
| 2 | 1 | t | t | |
| 3 | t | 1 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mortari, D.; Furfaro, R. Univariate Theory of Functional Connections Applied to Component Constraints. Math. Comput. Appl. 2021, 26, 9. https://doi.org/10.3390/mca26010009
Mortari D, Furfaro R. Univariate Theory of Functional Connections Applied to Component Constraints. Mathematical and Computational Applications. 2021; 26(1):9. https://doi.org/10.3390/mca26010009
Chicago/Turabian StyleMortari, Daniele, and Roberto Furfaro. 2021. "Univariate Theory of Functional Connections Applied to Component Constraints" Mathematical and Computational Applications 26, no. 1: 9. https://doi.org/10.3390/mca26010009
APA StyleMortari, D., & Furfaro, R. (2021). Univariate Theory of Functional Connections Applied to Component Constraints. Mathematical and Computational Applications, 26(1), 9. https://doi.org/10.3390/mca26010009