Two-Dimensional Exact Subdomain Technique of Switched Reluctance Machines with Sinusoidal Current Excitation


 ,
,  ,
,
Abstract
:1. Introduction
- multi-layer models using the convolution theorem (i.e., Cauchy’s product theorem). The adjacent regions (e.g., rotor and/or stator slots/teeth) are assumed to be one homogeneous region with a relative permeability developed as a Fourier’s series expansion;
- the subdomain technique using a superposition that allows for any non-periodic subdomain. The subdomain connection is performed directly in both directions. The general solutions of Maxwell’s equations are deduced by applying the principle of superposition by respecting the BCs on the various edges of subdomains.
2. Studied SRMs and Magnetic Field Solutions
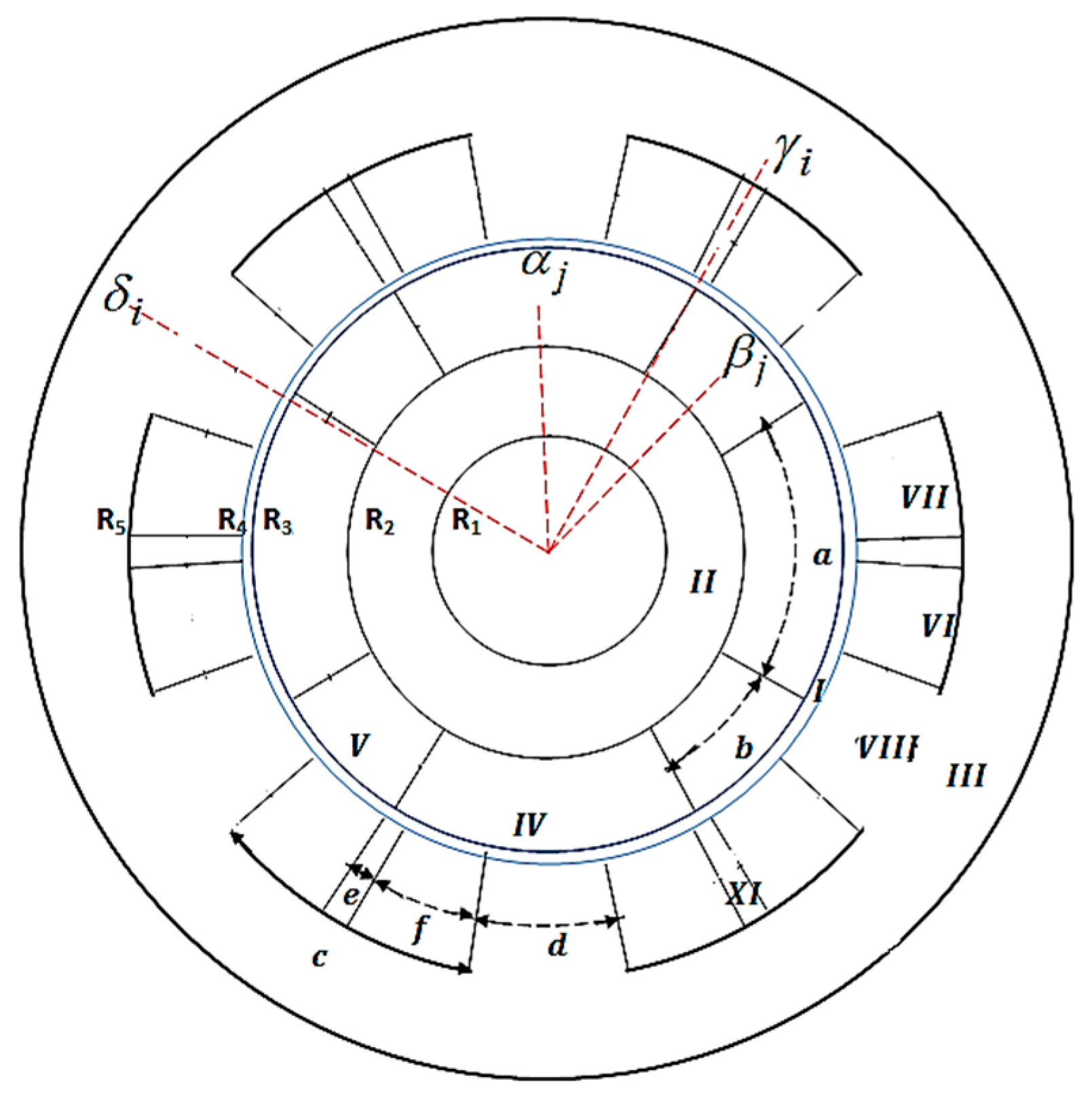
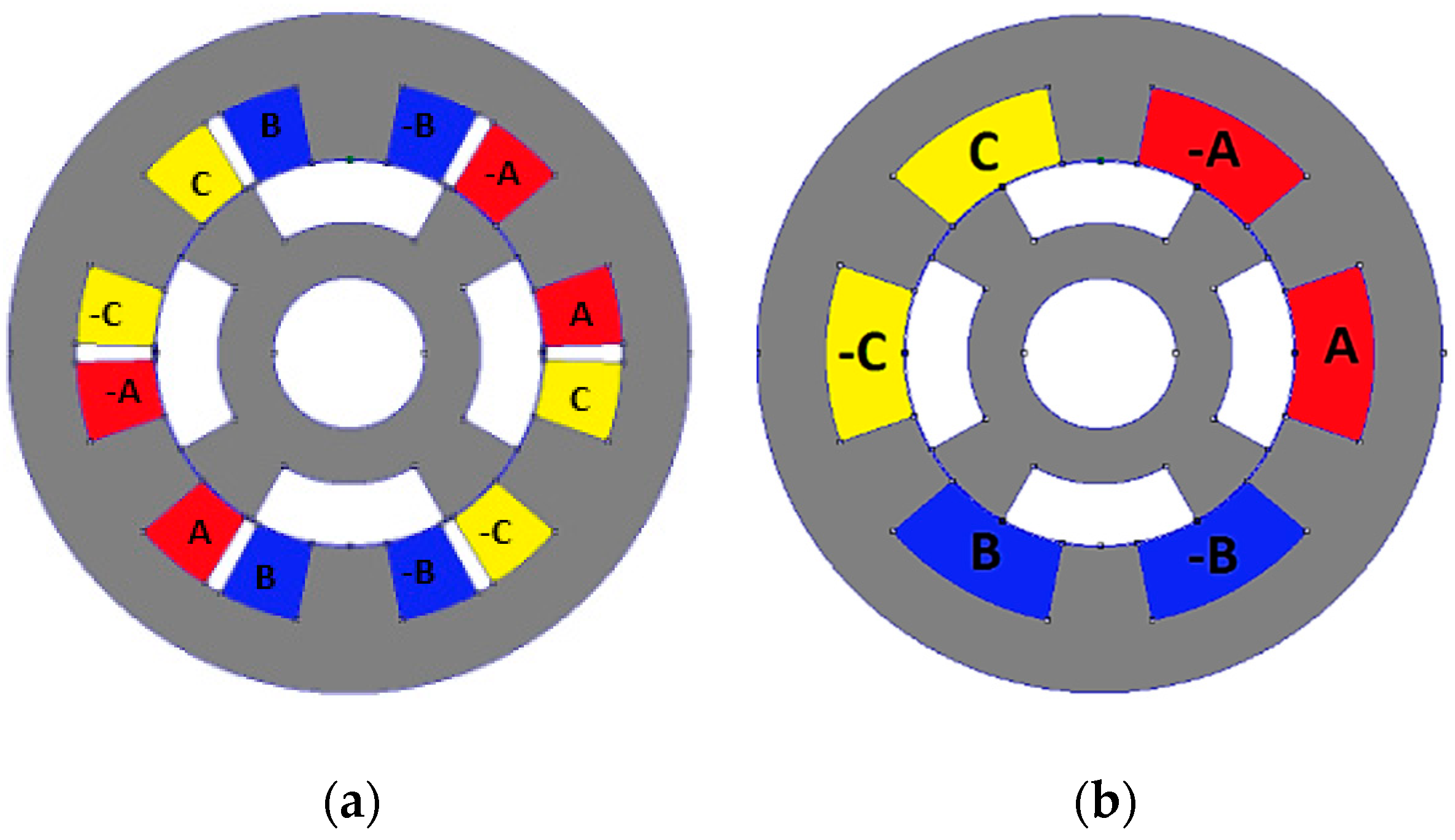
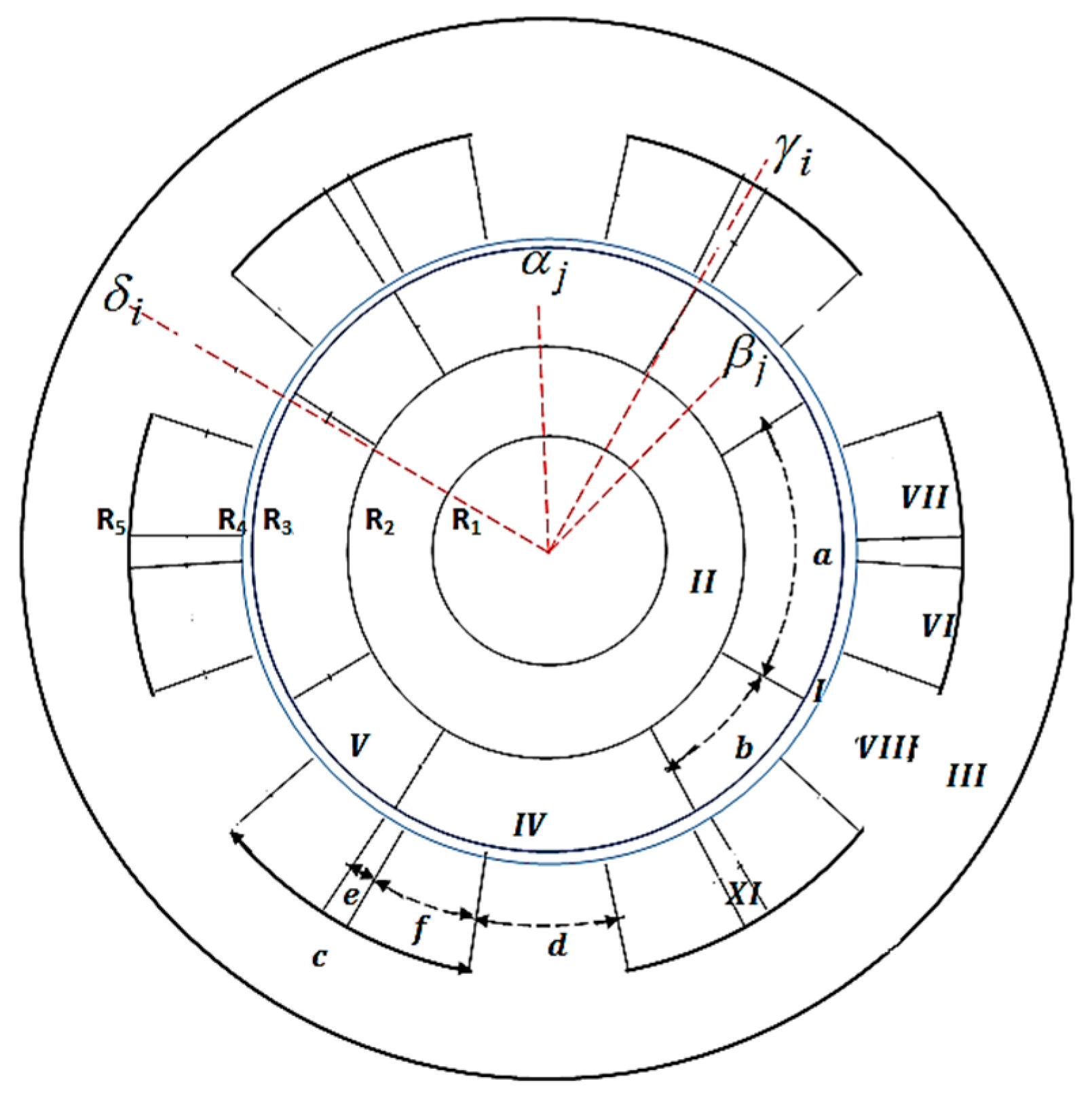
2.1. Machine Geometry and Assumptions
- Region I is the air gap;
- Regions II and III are the rotor yoke (i.e., between rotor shaft and rotor slots/teeth) and the stator yoke, respectively;
- Region IV is the rotor slots;
- Region V is the rotor teeth;
- Regions VI and VII are the stator slots of the first layer (i.e., right in the slot) and second layer (i.e., left in the slot), respectively;
- Region VIII is the stator teeth;
- Region XI is the non-periodic air gap (i.e., between the two-layer winding of the stator slots).
- The end-effects are neglected, i.e., ;
- The eddy-current effects in the materials are neglected;
- The current density in the stator slots has only one component along the z-axis, i.e., ;
- The magnetic materials are considered as isotropic with constant magnetic permeability corresponding to linear zone of the B(H) curve;
- The stator and rotor slots/teeth have radial sides (see Figure 2).
- The internal/external rotor topology;
- The saturation, slotting and curvature effect;
- The (non-)overlapping winding distribution;
- Any current waveform (i.e., sinusoidal or rectangular).
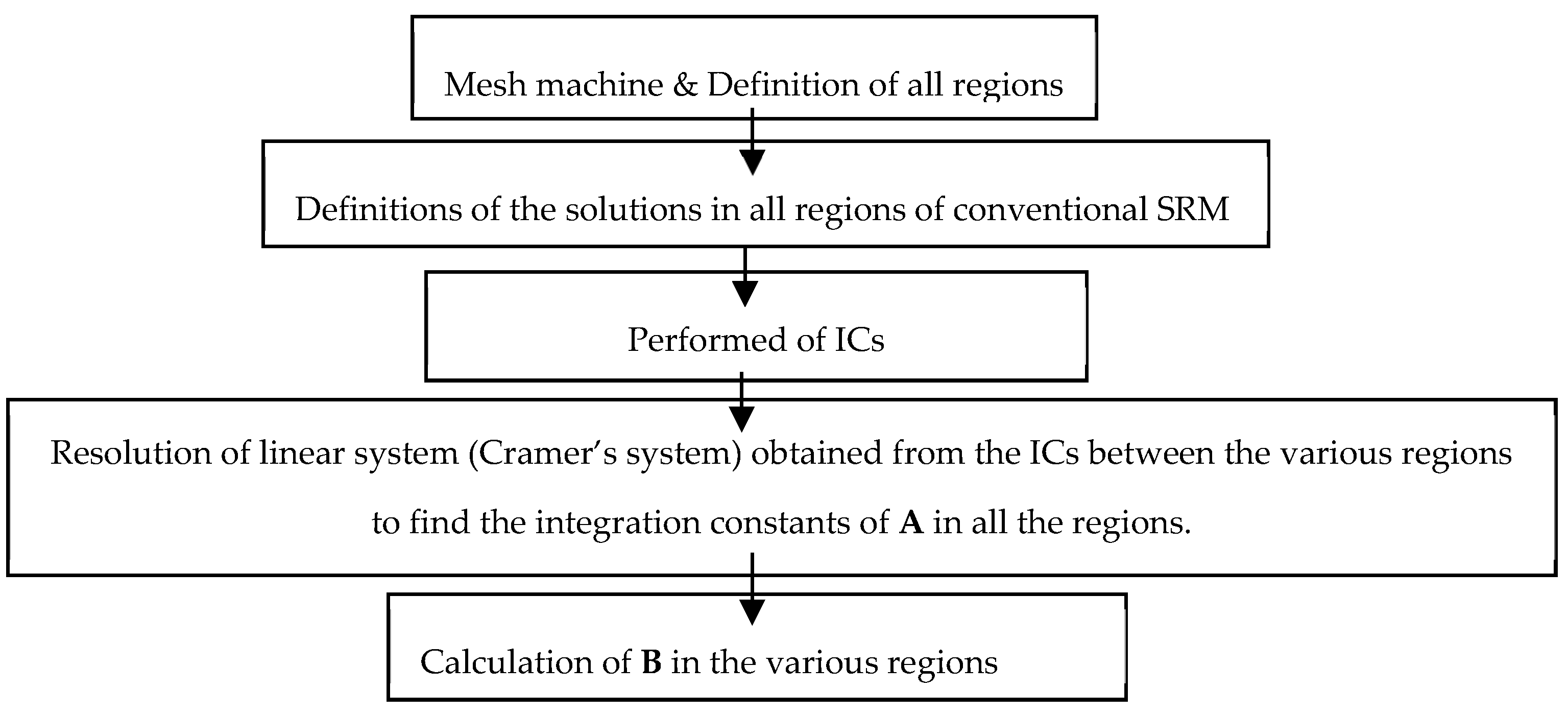
2.2. General Solution with Non-Homogeneous Neumann BCs
- Air gap subdomain (Region I): The solution of (1) in Region I, & , is defined by:where n is a positive integer, and are the integration constants of Region I.
- Stator and rotor yoke subdomain (Region II and III): In adding Dirichlet BC of A at and , viz., & , the solution of (1) in Region II, & , can be written as:where are the integration constants of Region II.
- i-th Stator slot subdomain (Region VI and VII): The solution of (2) in Region VI, & , is defined by:where and are positive integers, and are respectively the position and opening width of first layer winding in the i-th stator slot, are the integration constants of Region VI, and are respectively the periodicity of in θ-and r-edges.
- i-th Non-periodic air gap and i-th stator tooth subdomain (Region XI and VIII): The solution of (1) in Region VIII, & , and in Region XI, & , can be obtained directly from (5) with .
- j-th Rotor slot and j-th rotor tooth subdomain (Region IV and V): The solution of (1) in Region IV, & , is defined by:where and are respectively the position and opening width of j-th rotor slot, are the integration constants of Region IV, and are respectively the periodicity of in θ-and r-edges.
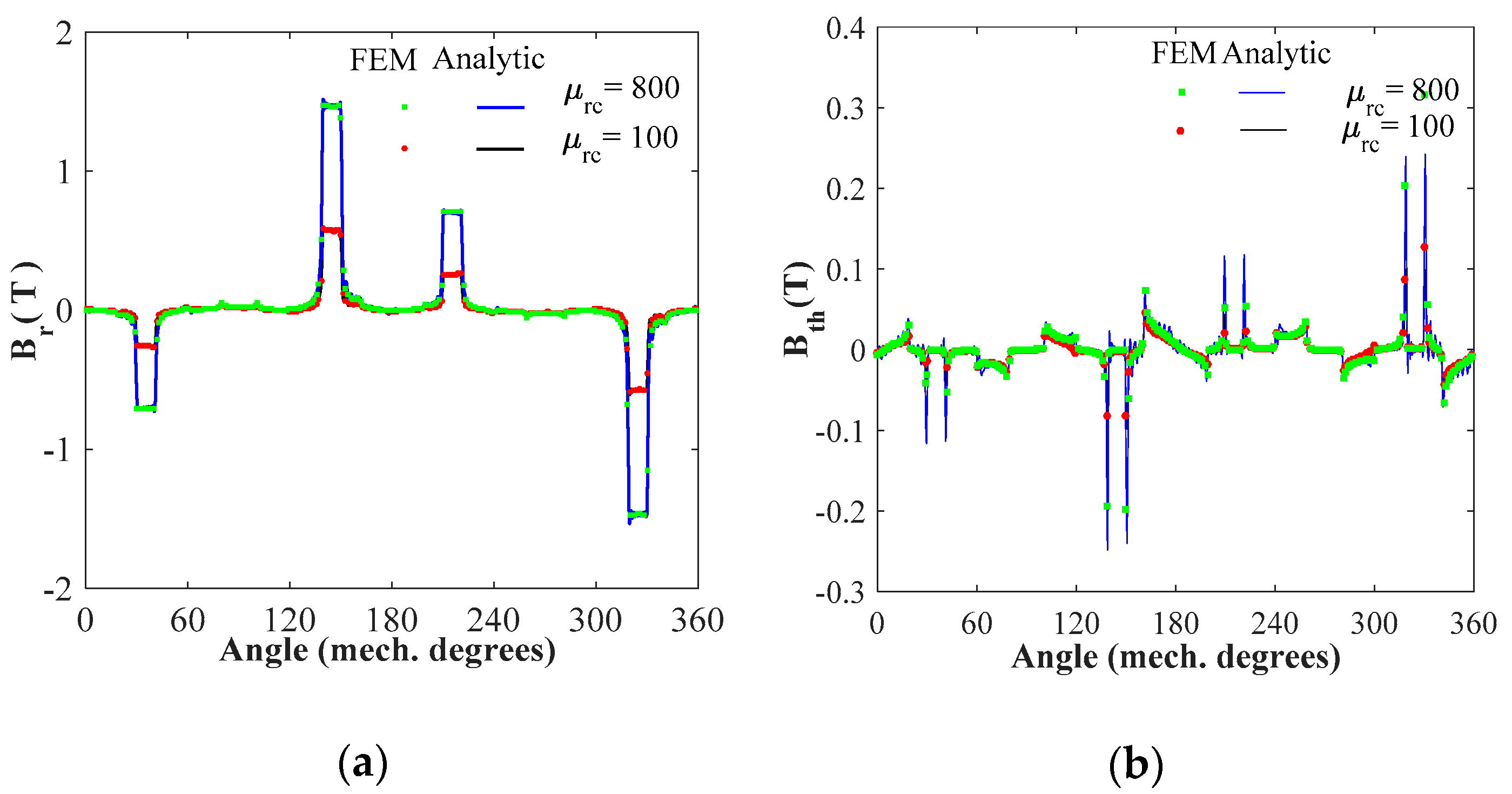
2.3. Magnetic Flux Density
2.4. Stator Current Density Source
- The opening of the non-periodic air gap will be equal to zero (i.e., e = 0);
- The stator current density will be equal to with and
2.5. Boundary Conditions
- θ-edges ICs: over angle interval for given radius value ;
- r-edges ICs: over radius interval for given angle .
- θ-edges ICs:
- -
- The ICs between Region II, IV and V at as:
- -
- The ICs between Region I, IV and V at are similar to (13)–(16) by replacing II with I and with .
- -
- The ICs between Region I, VI, VII, VIII and XI at as:
- -
- The ICs between Region III, VI, VII, VIII and XI at are similar to (17)–(24) by replacing I with III and with .
- r-edges ICs:
- -
- The ICs between Region IV and V at and for :
- -
- The ICs between Region VII and VIII at and between Region VI and VIII at for :
- -
- The ICs between Region VI and XI at and between Region VII and XI at for :
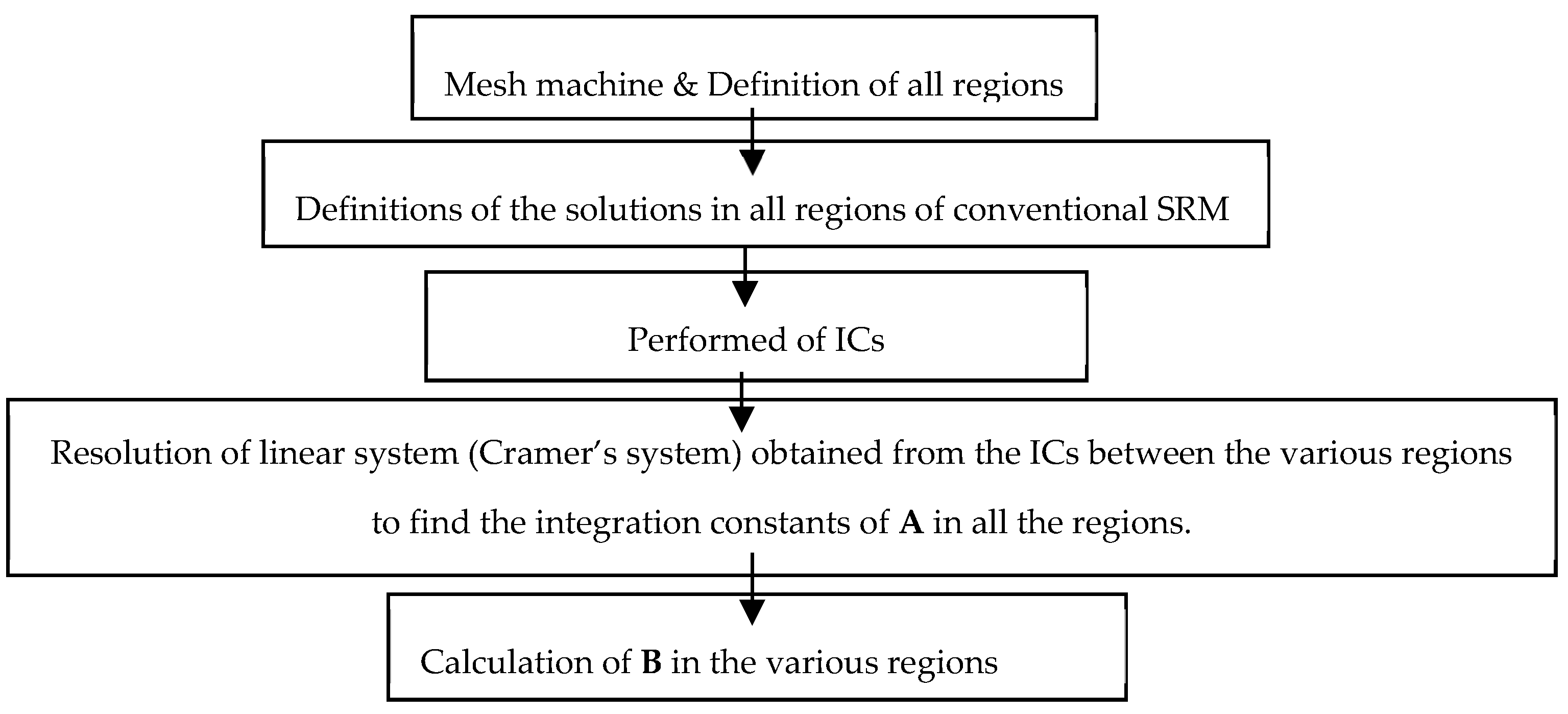
3. Electromagnetic Performance Calculations
3.1. Torque, Flux Linkage and Inductance Calculations
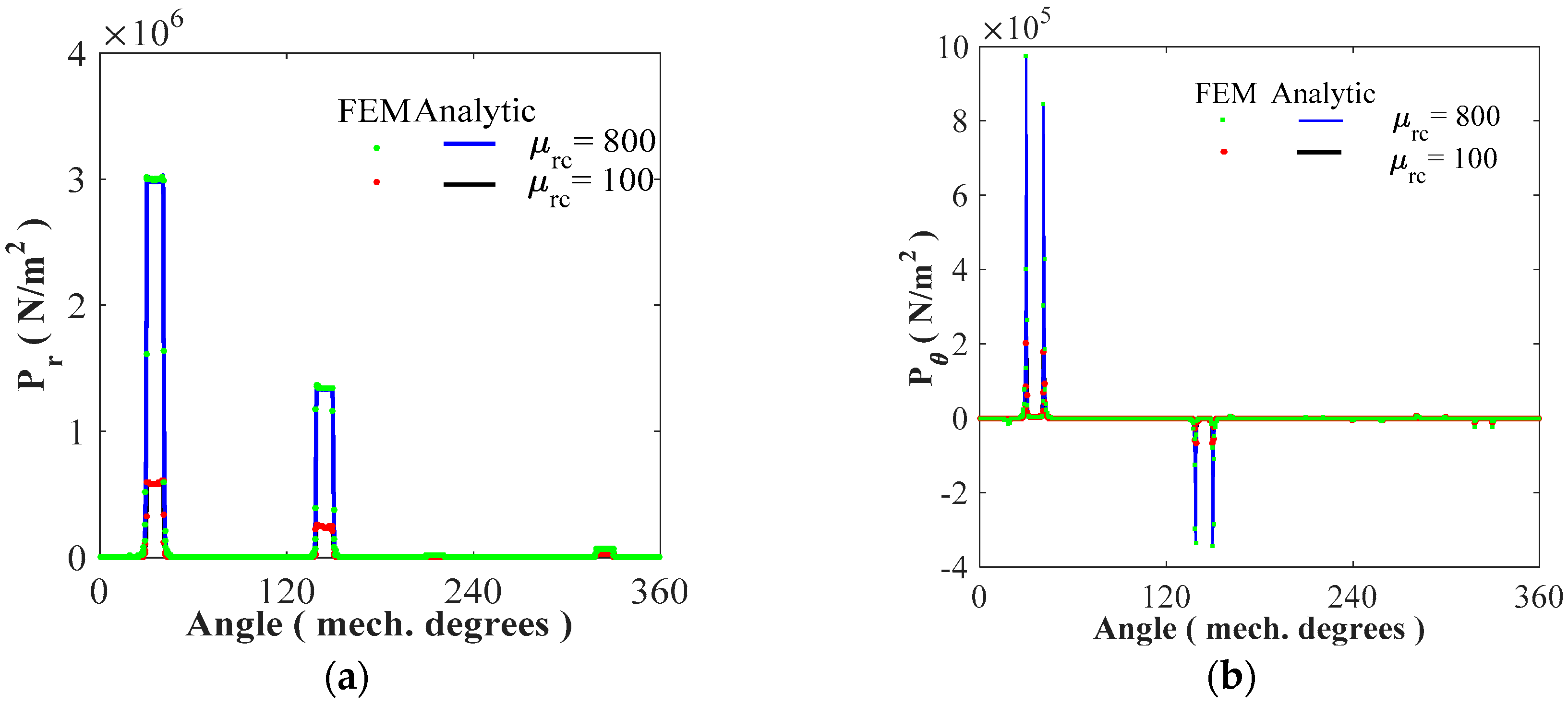
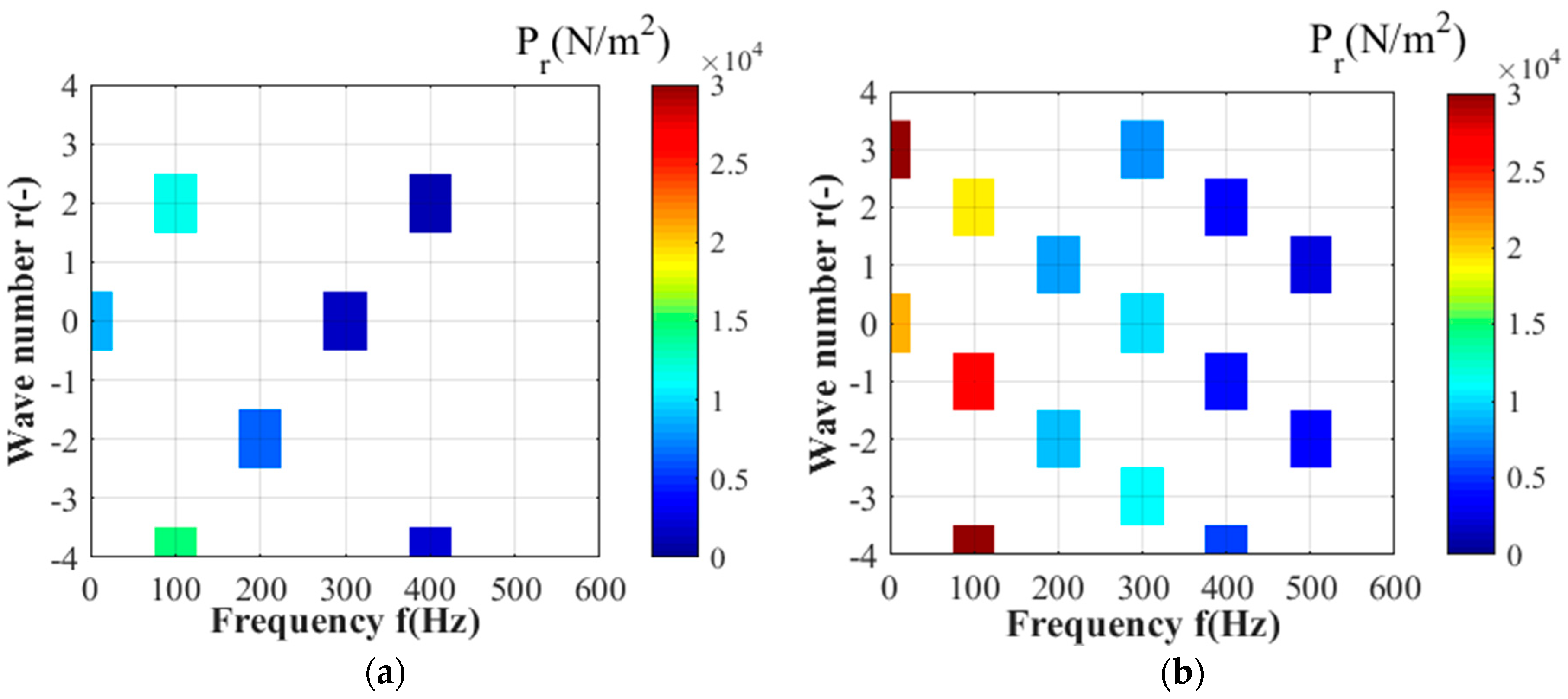
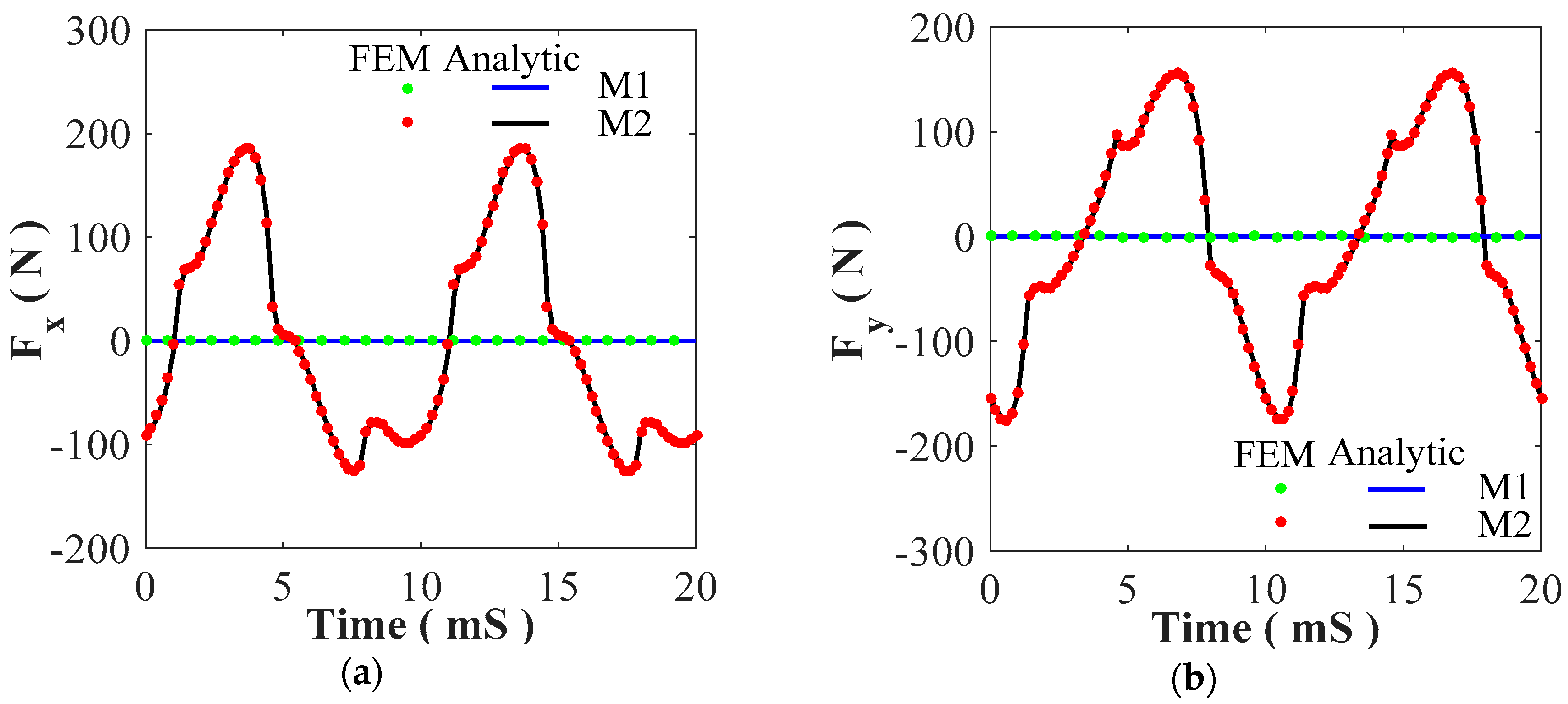
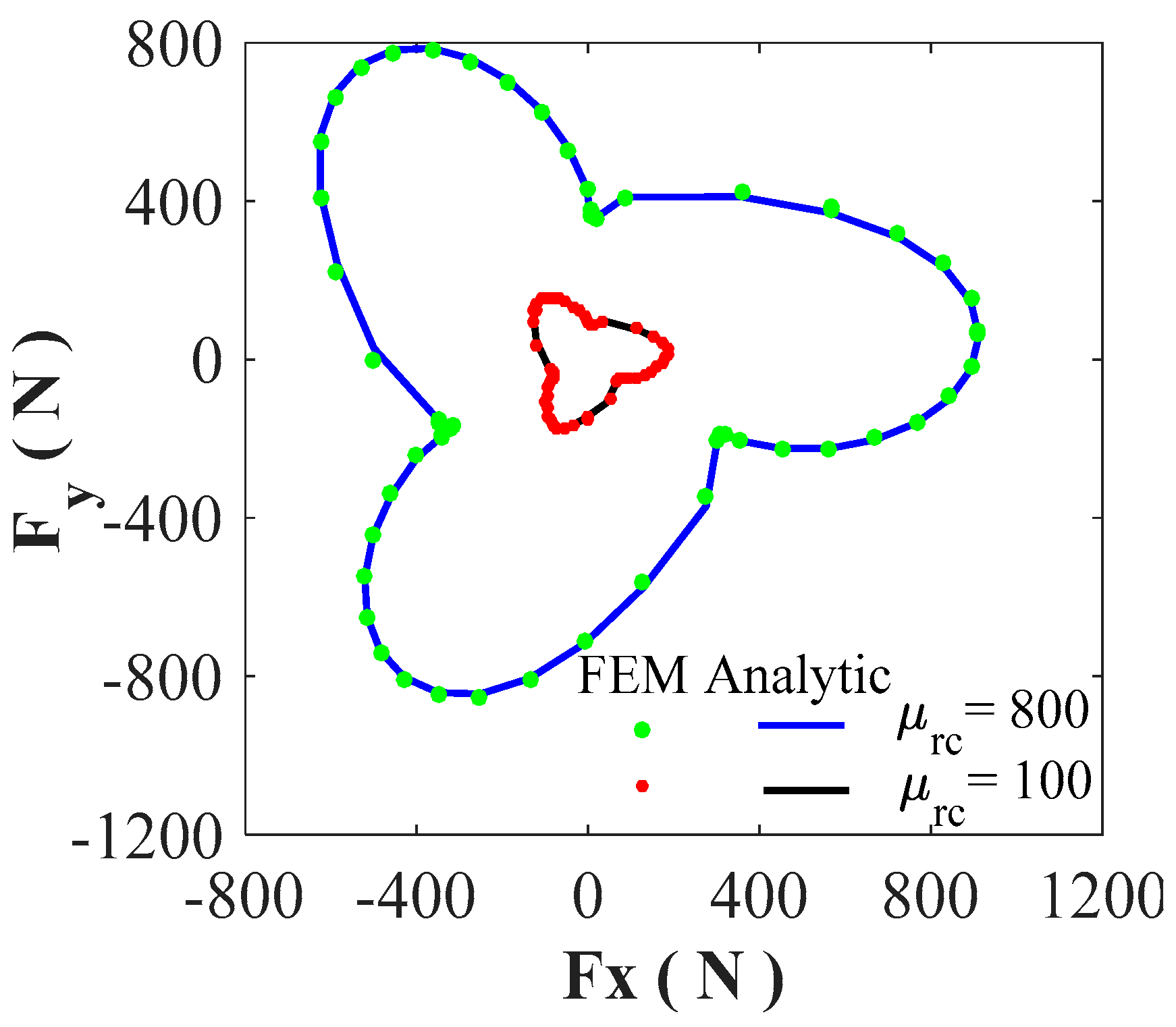
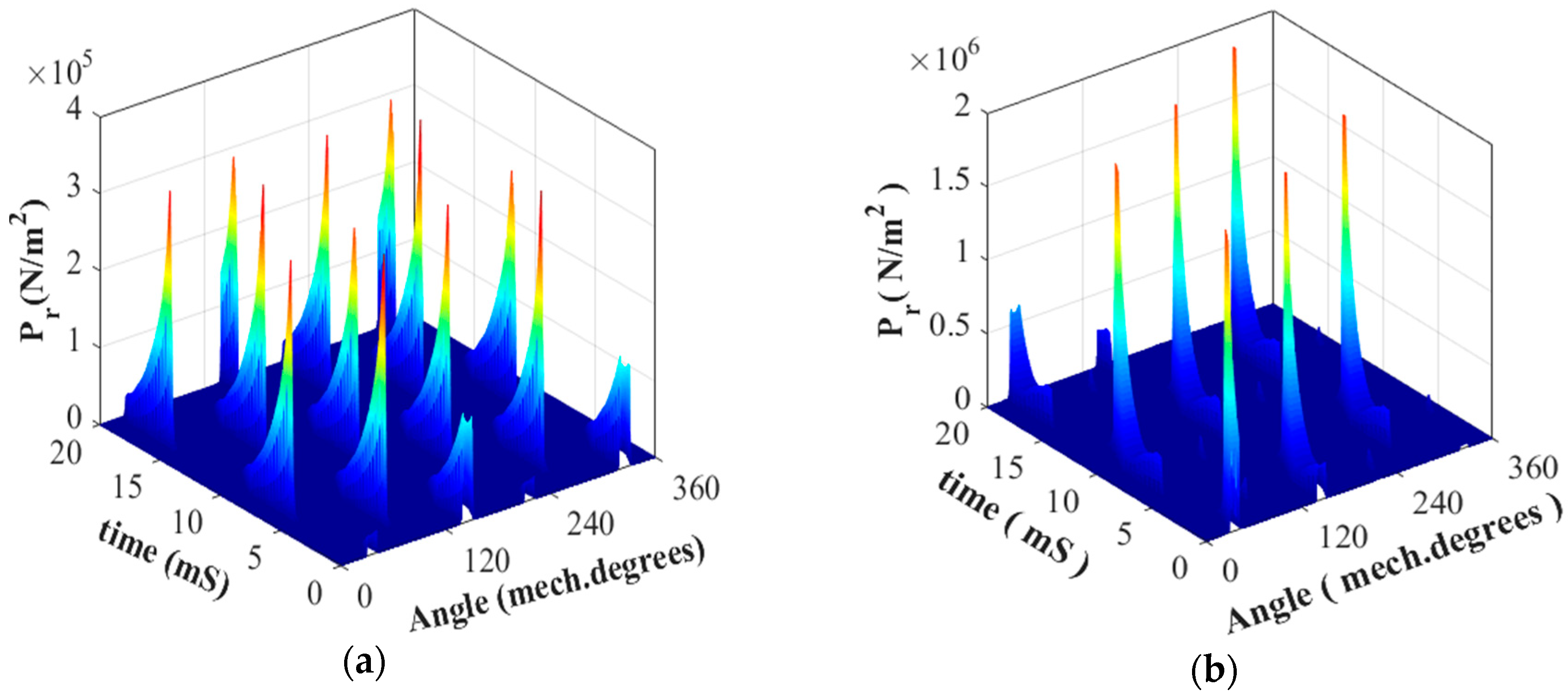
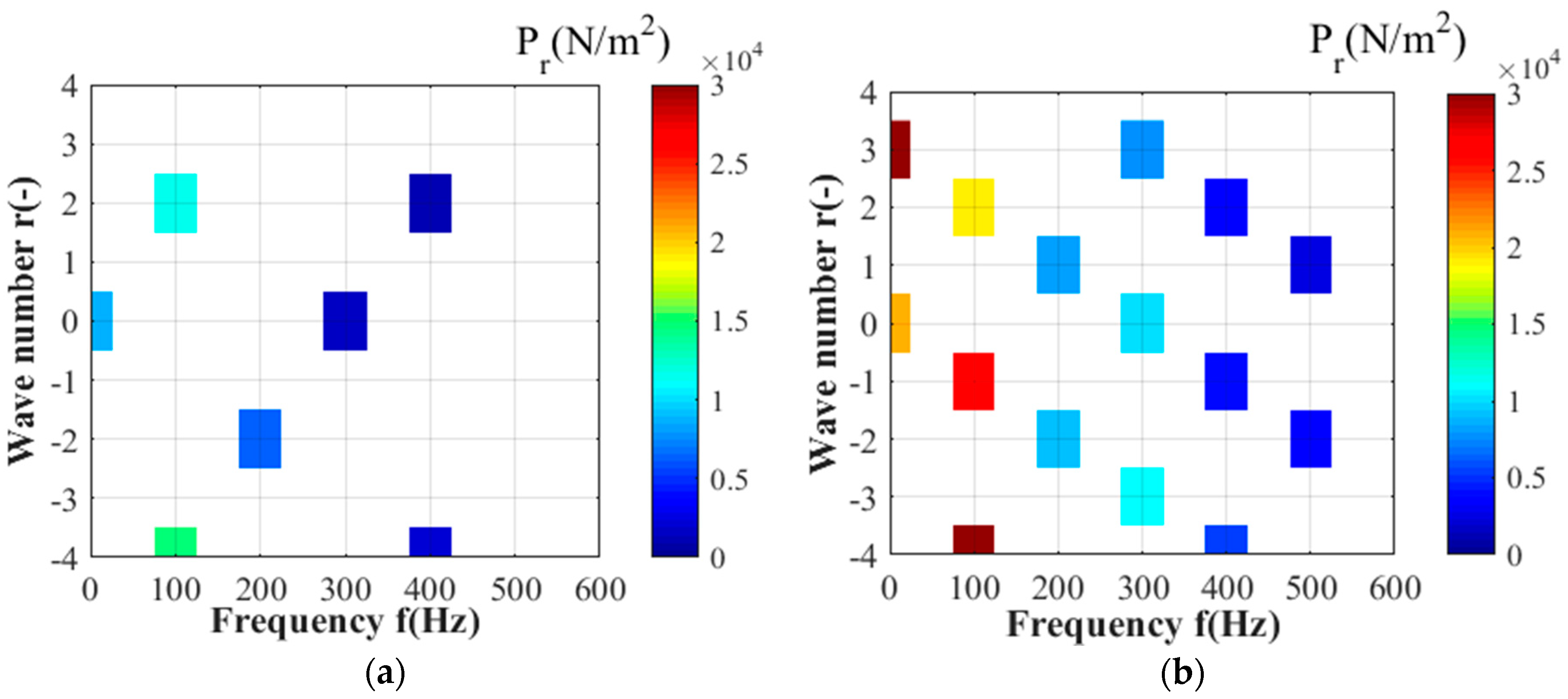
3.2. Magnetic Pressure and UMF Calculations
4. Results and Validations
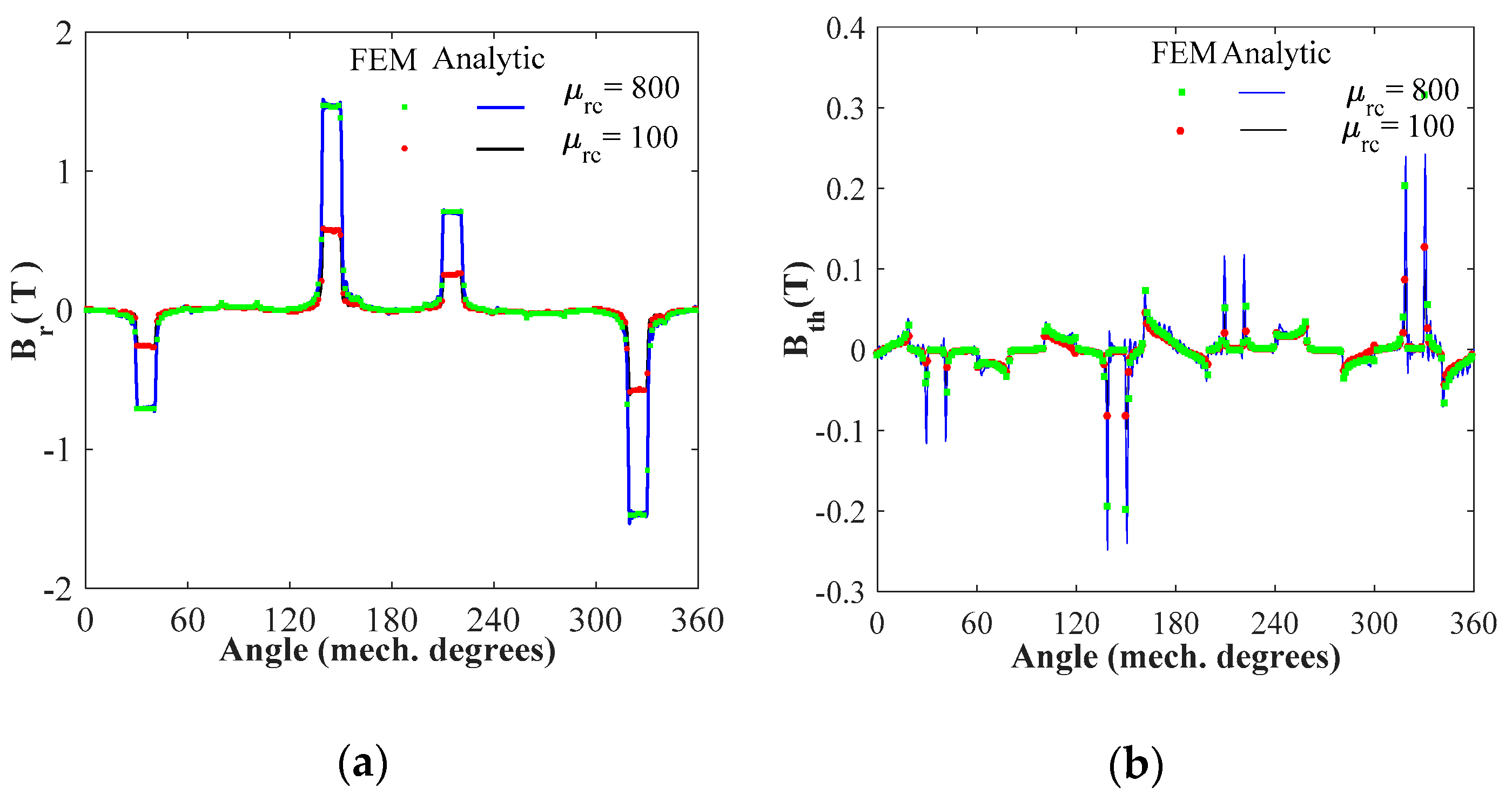
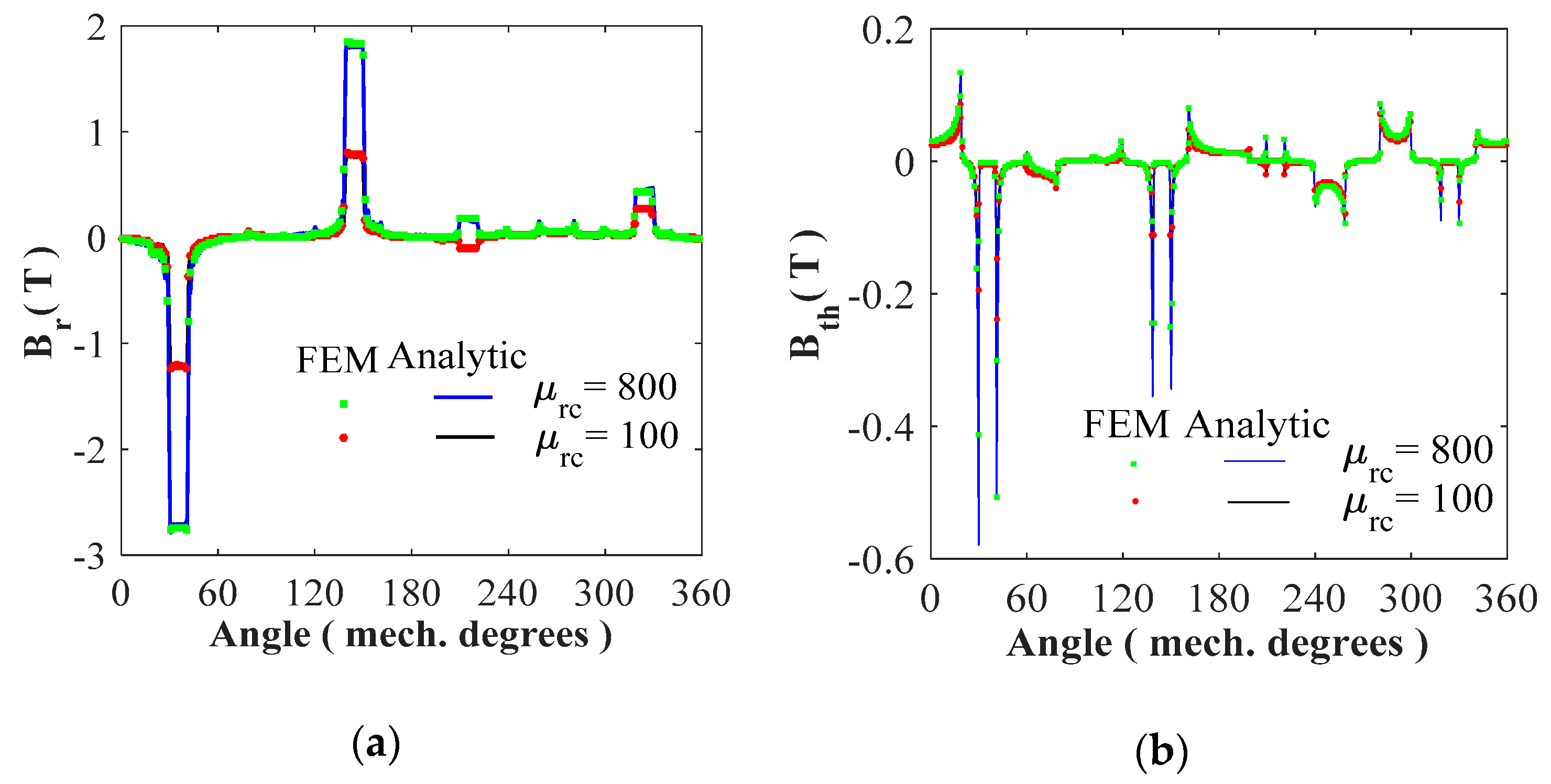
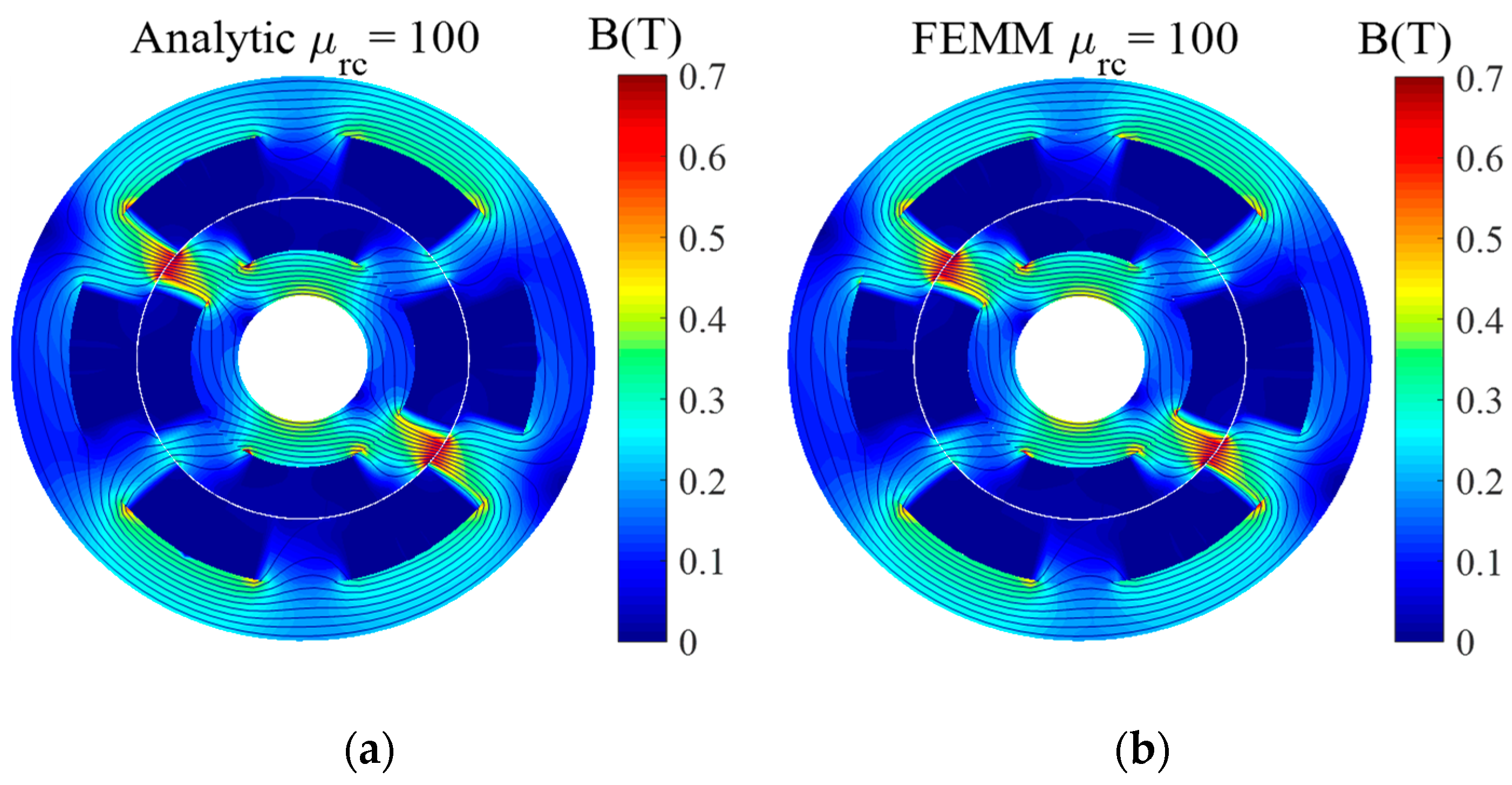
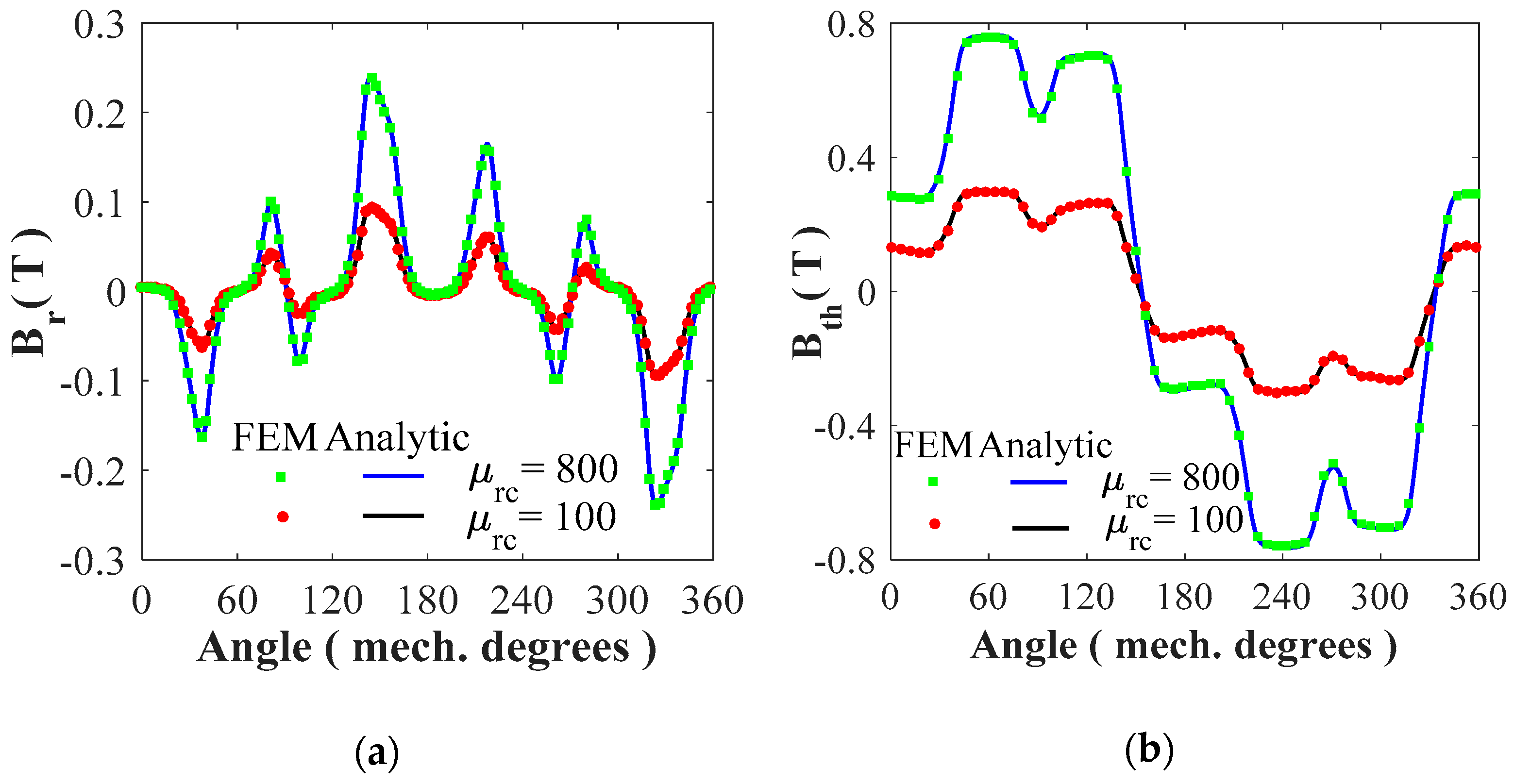
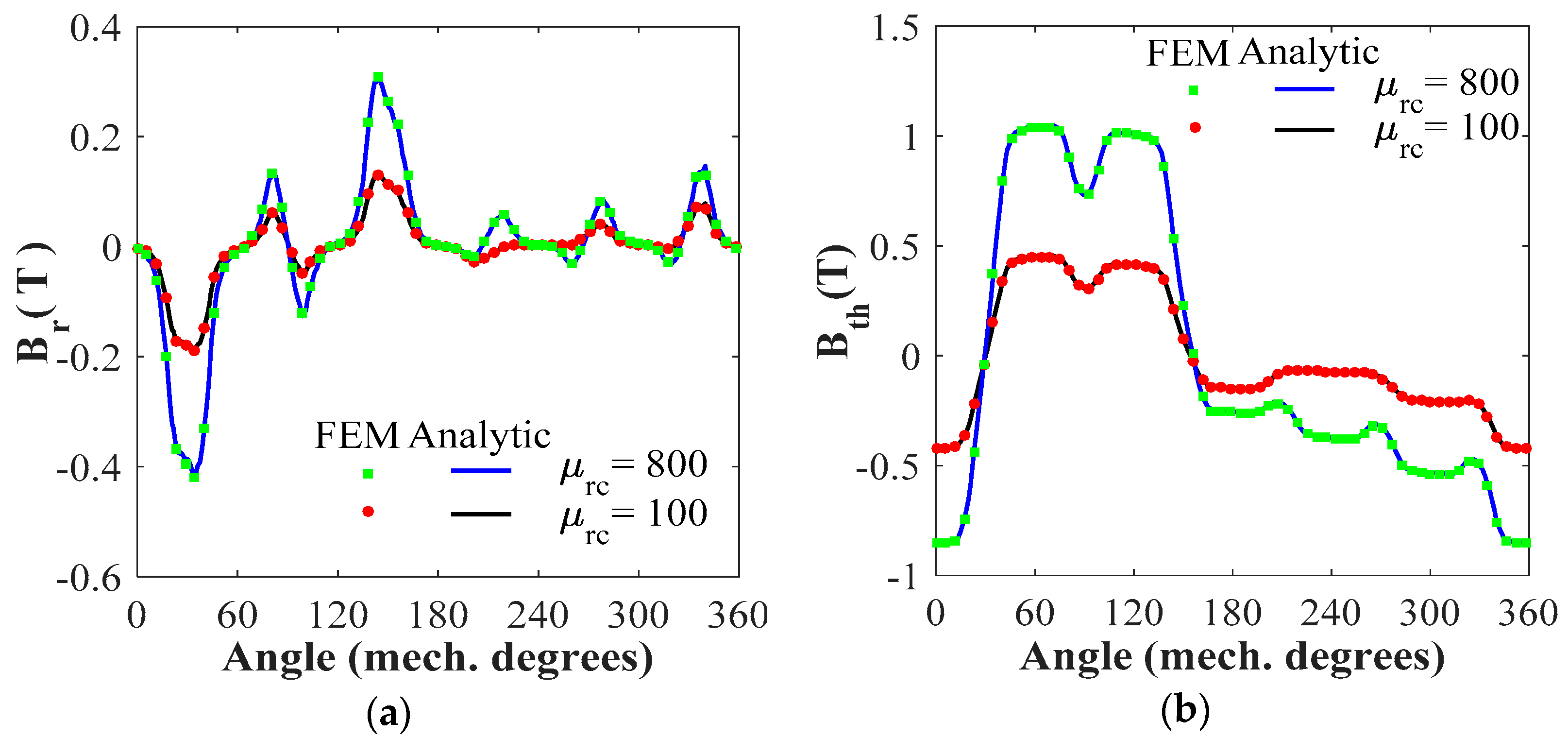
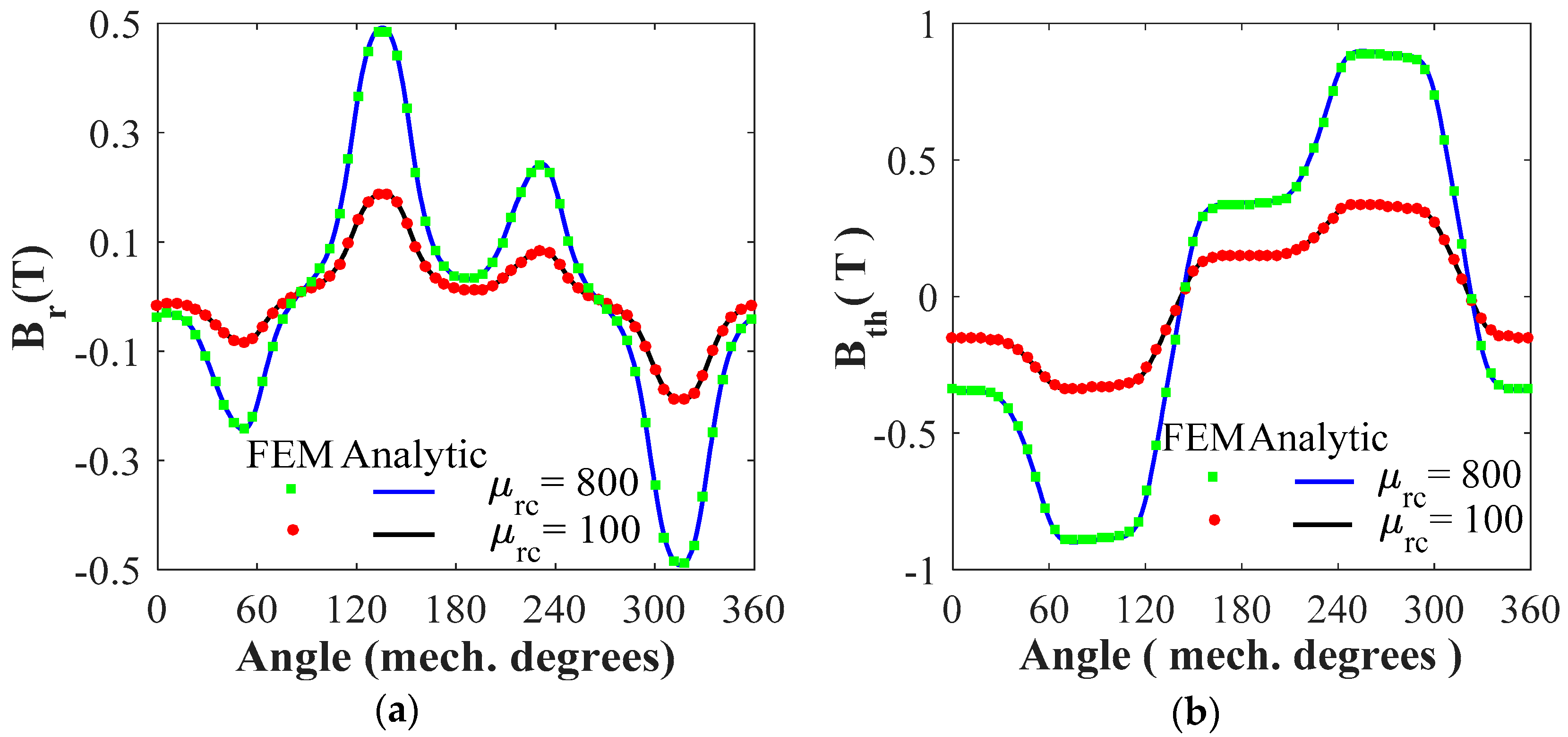
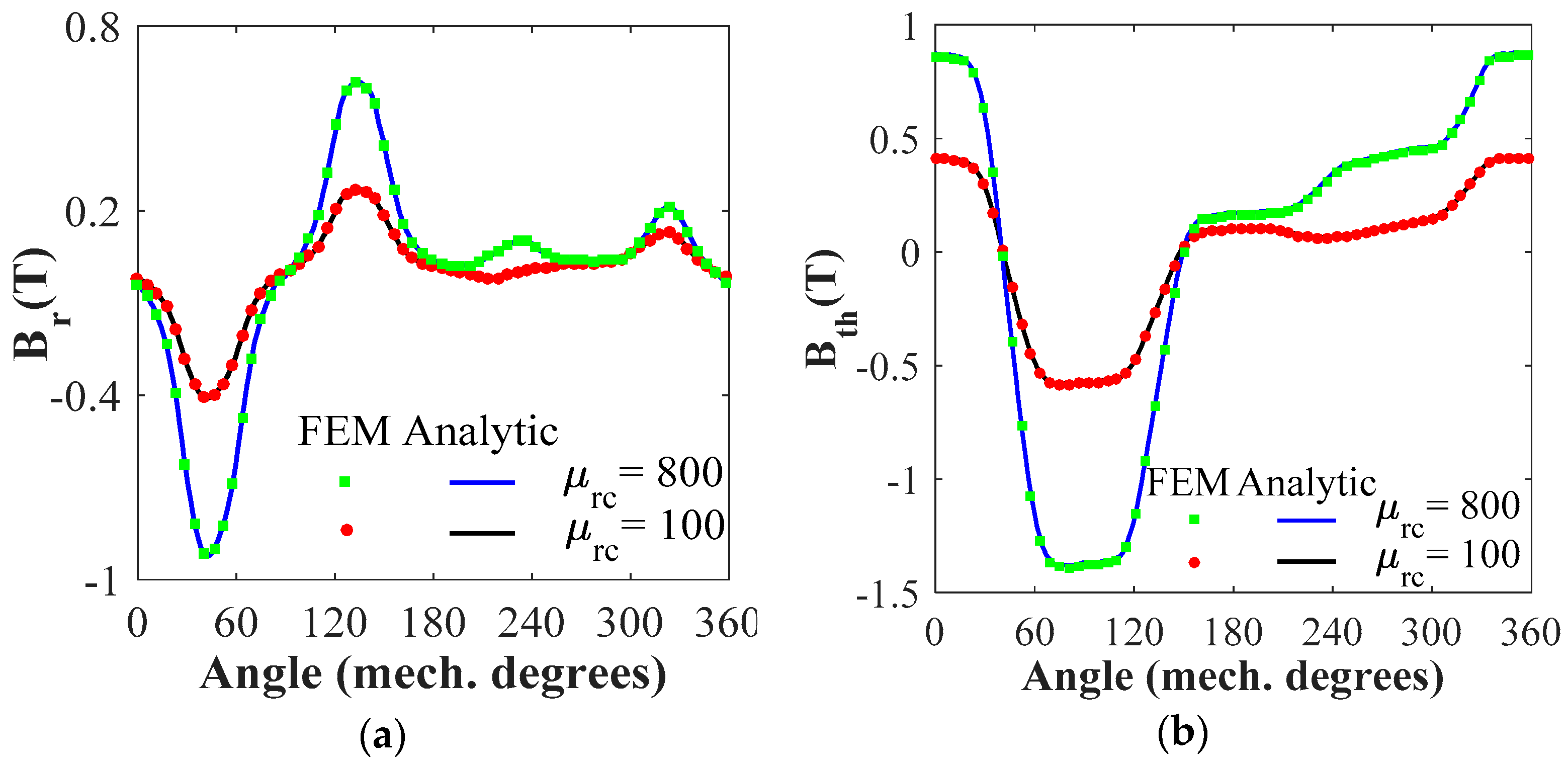
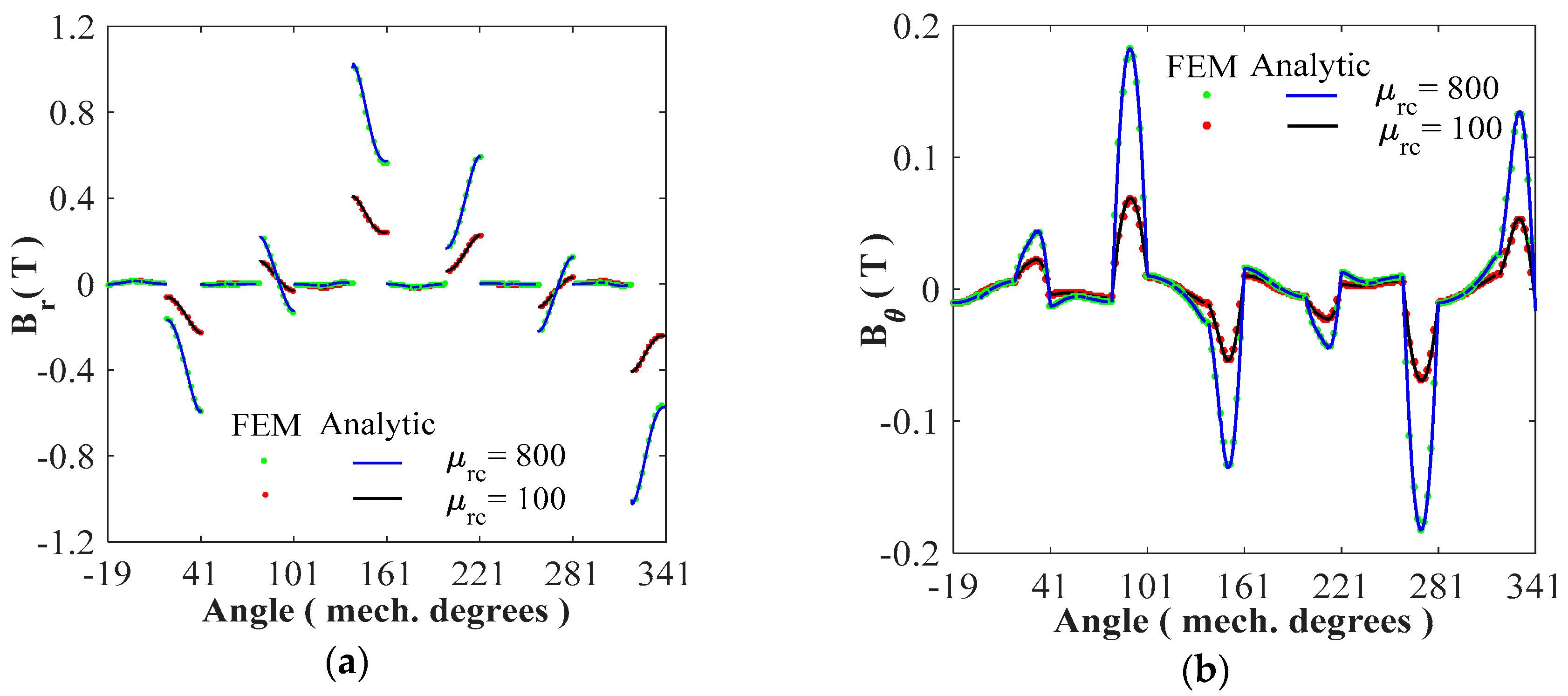
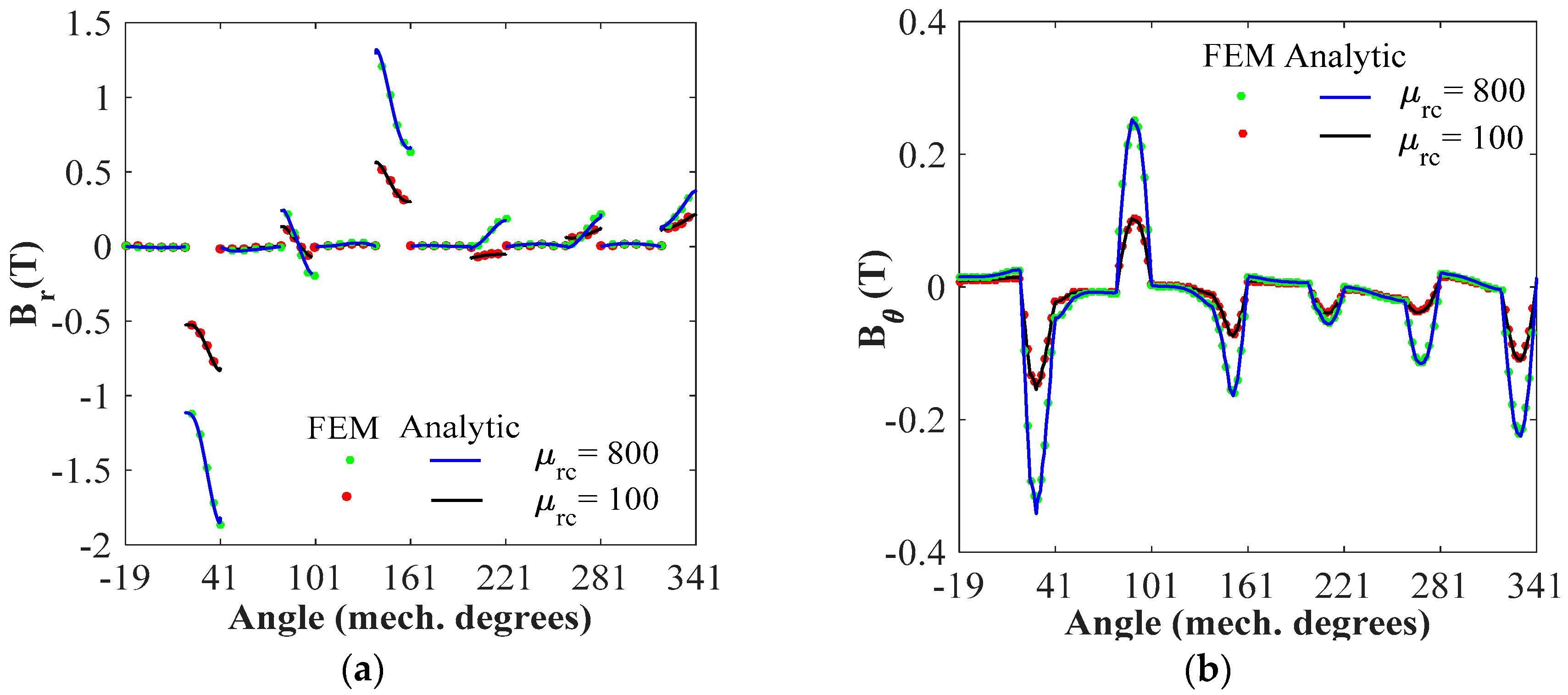
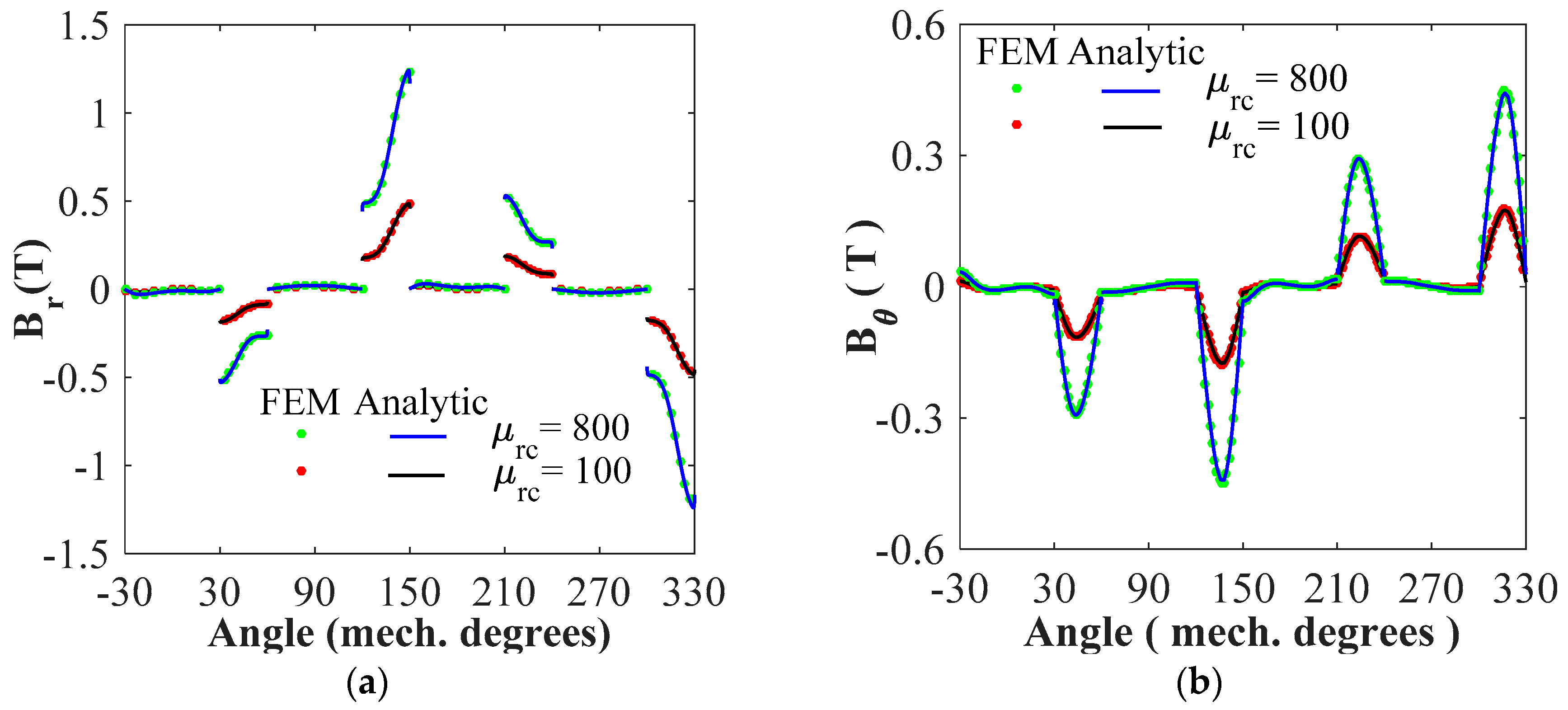
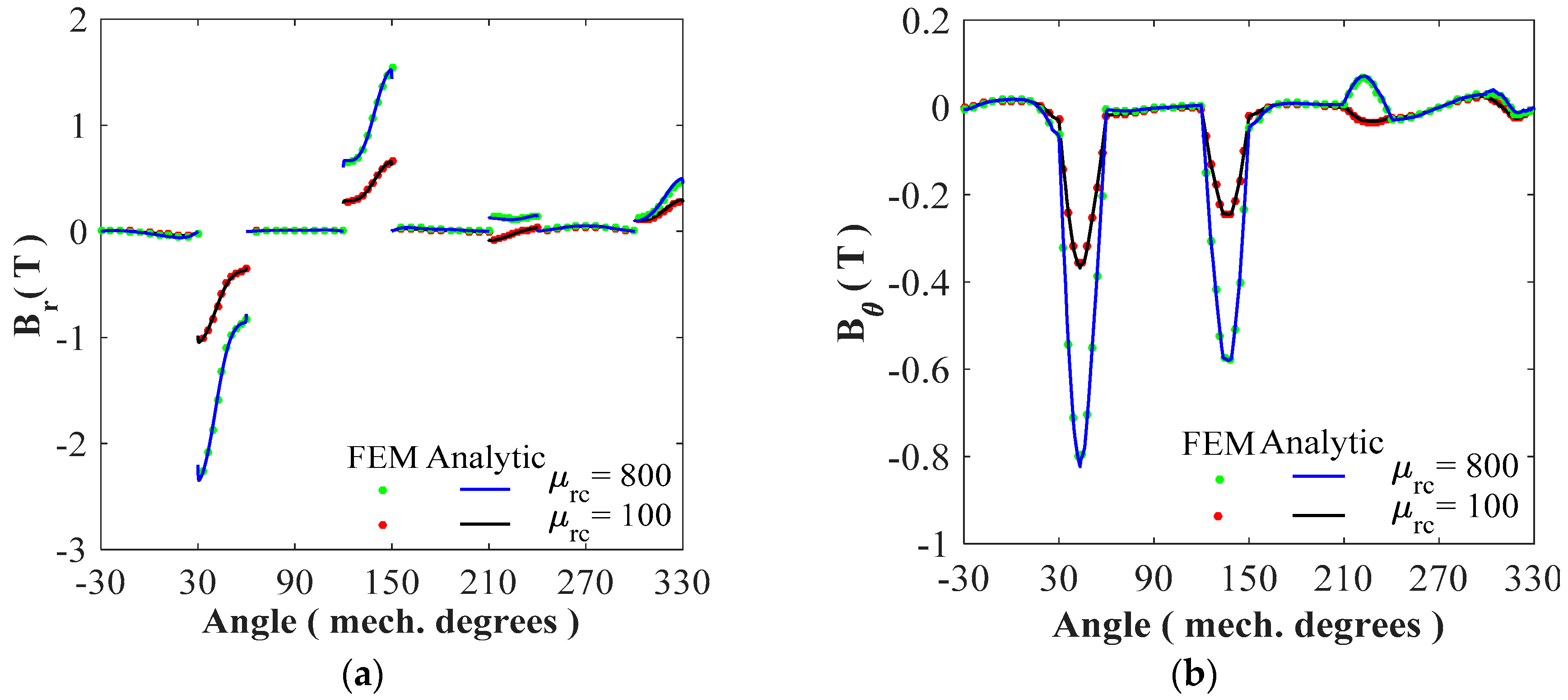
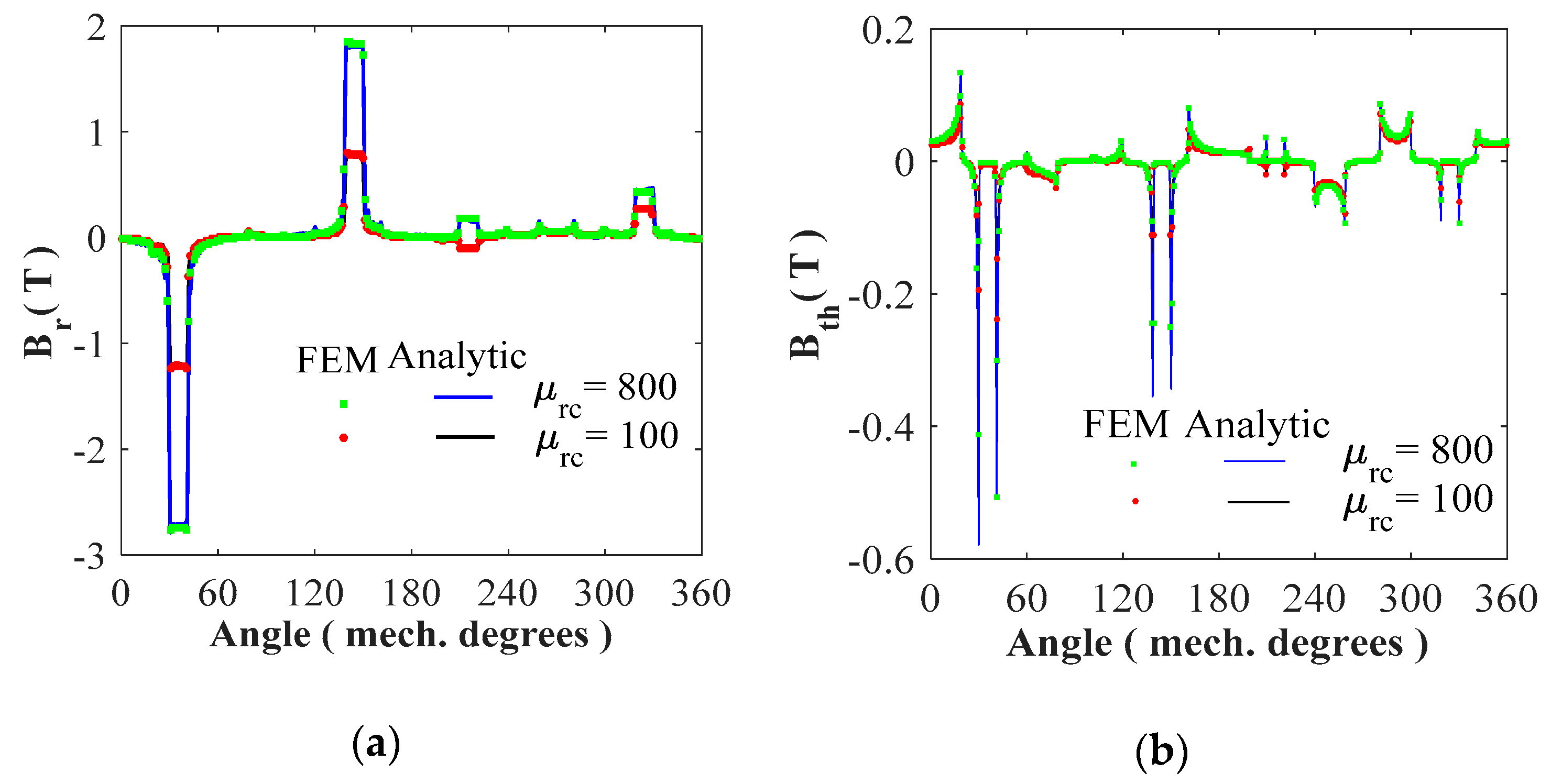
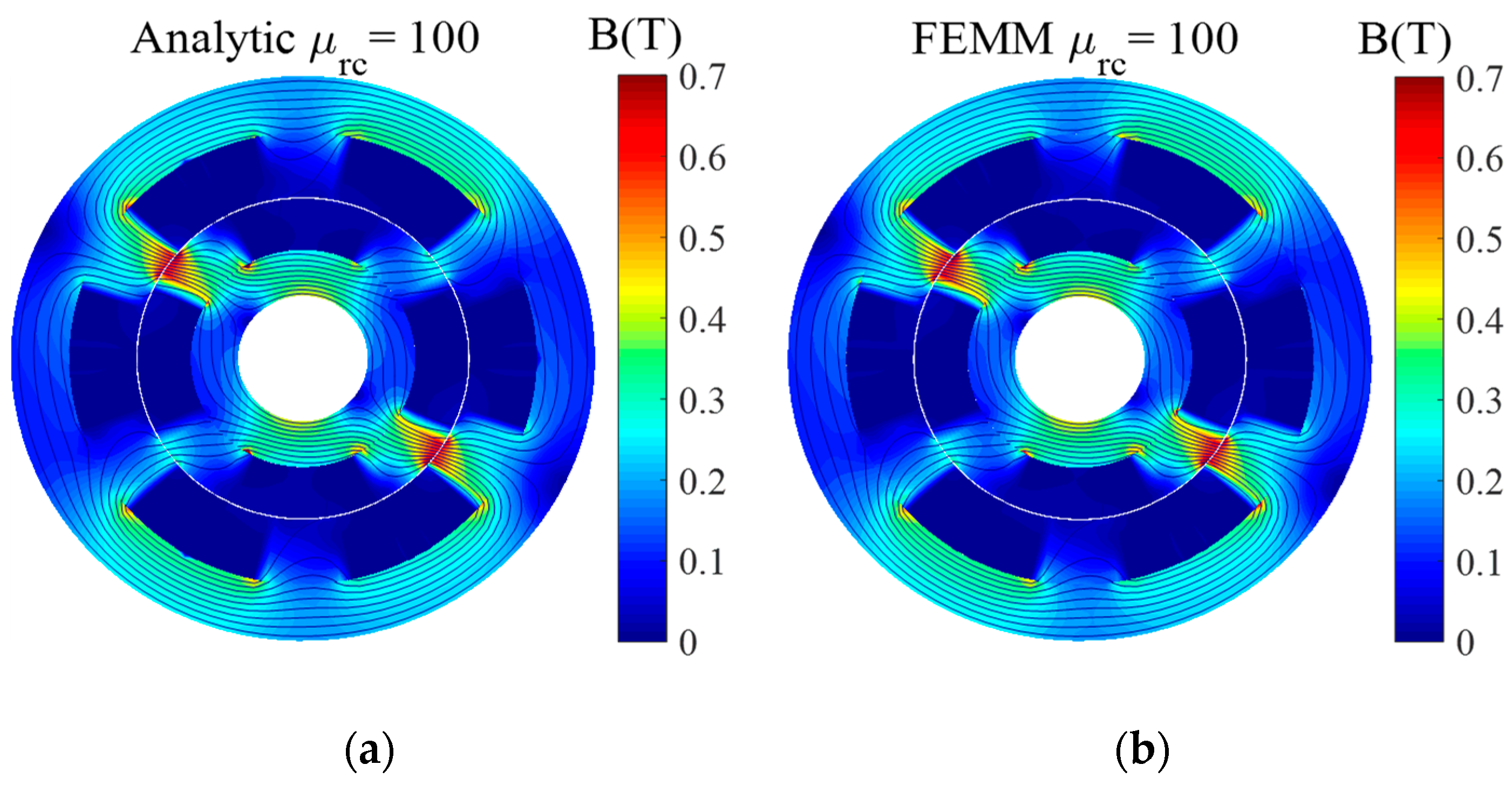
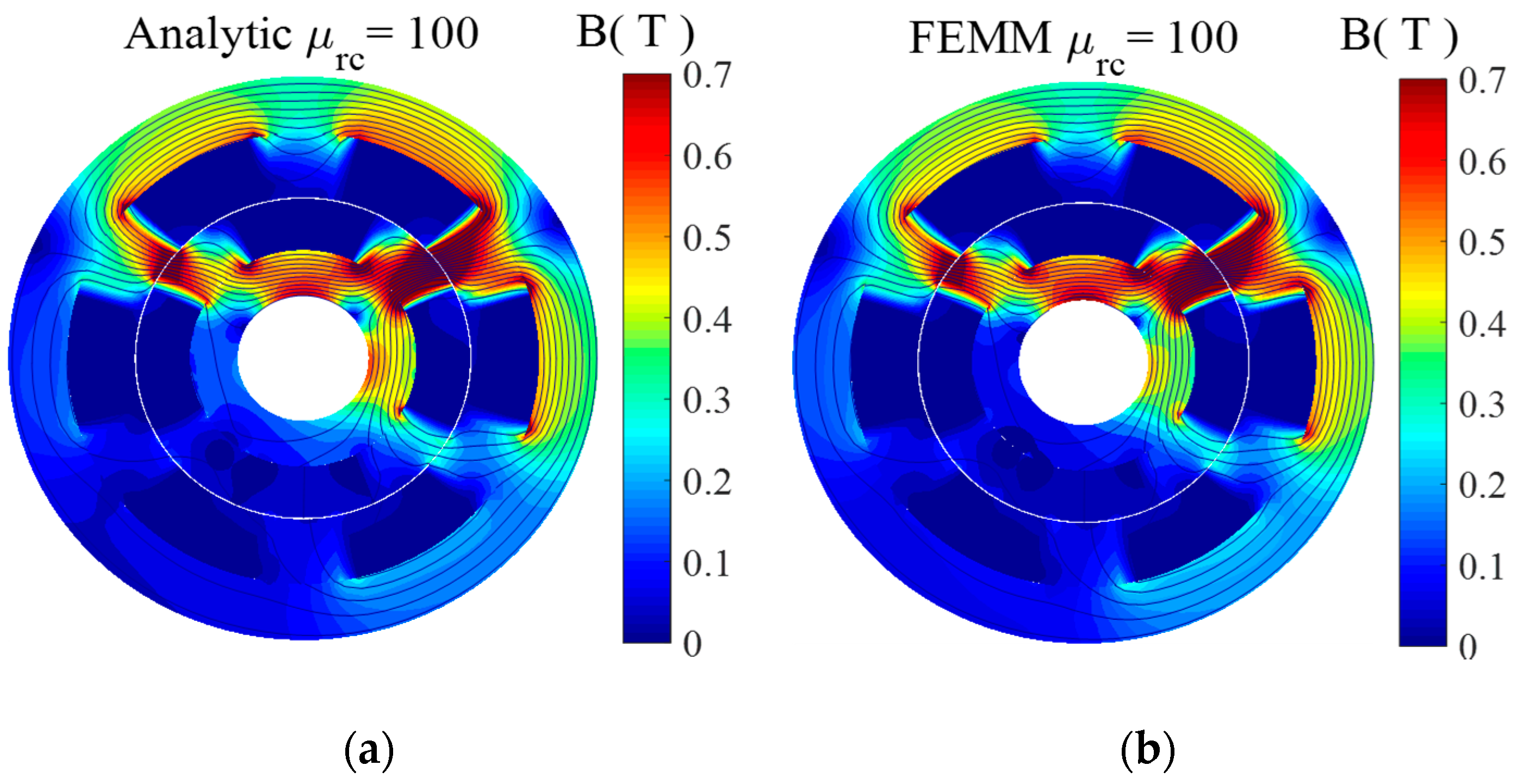
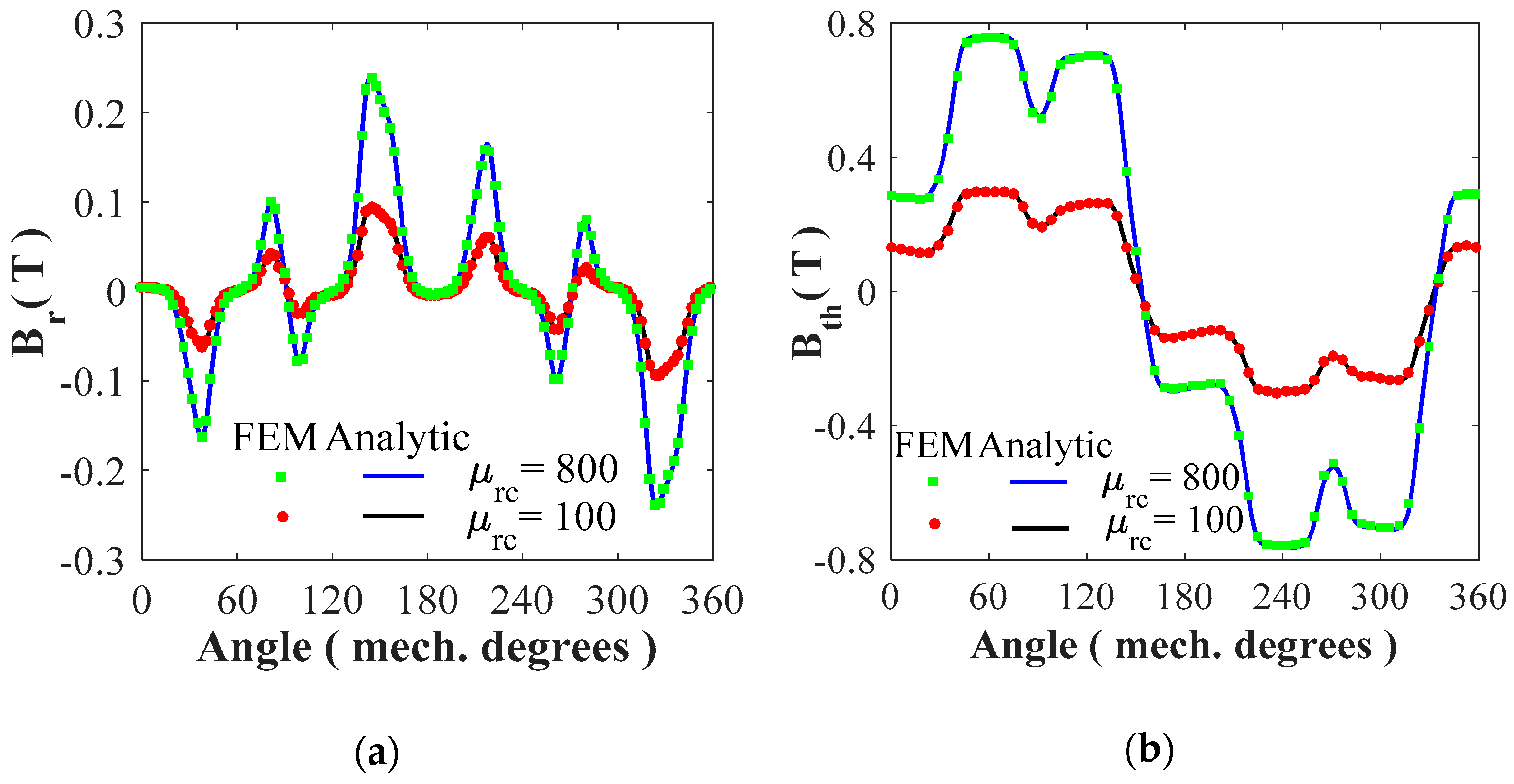
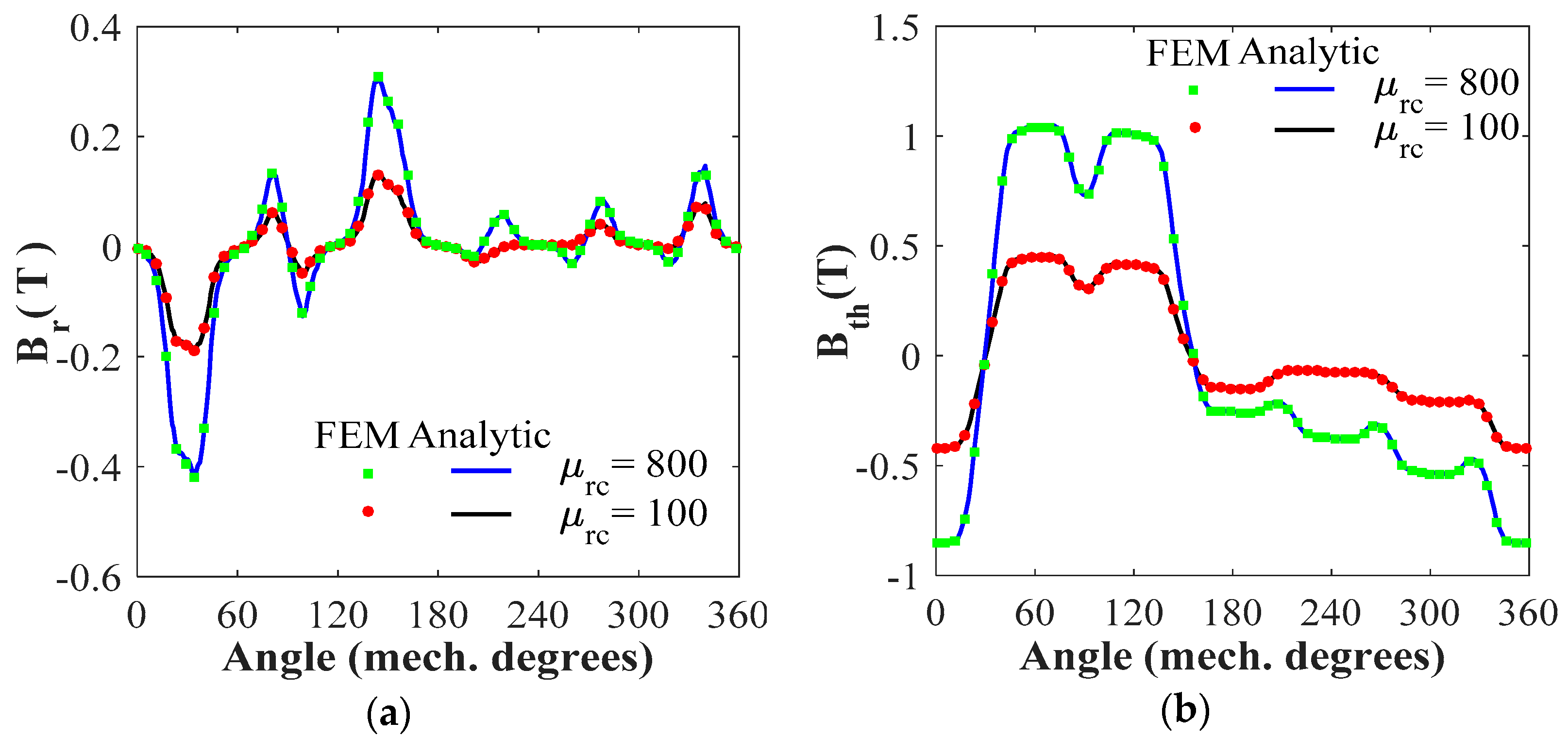
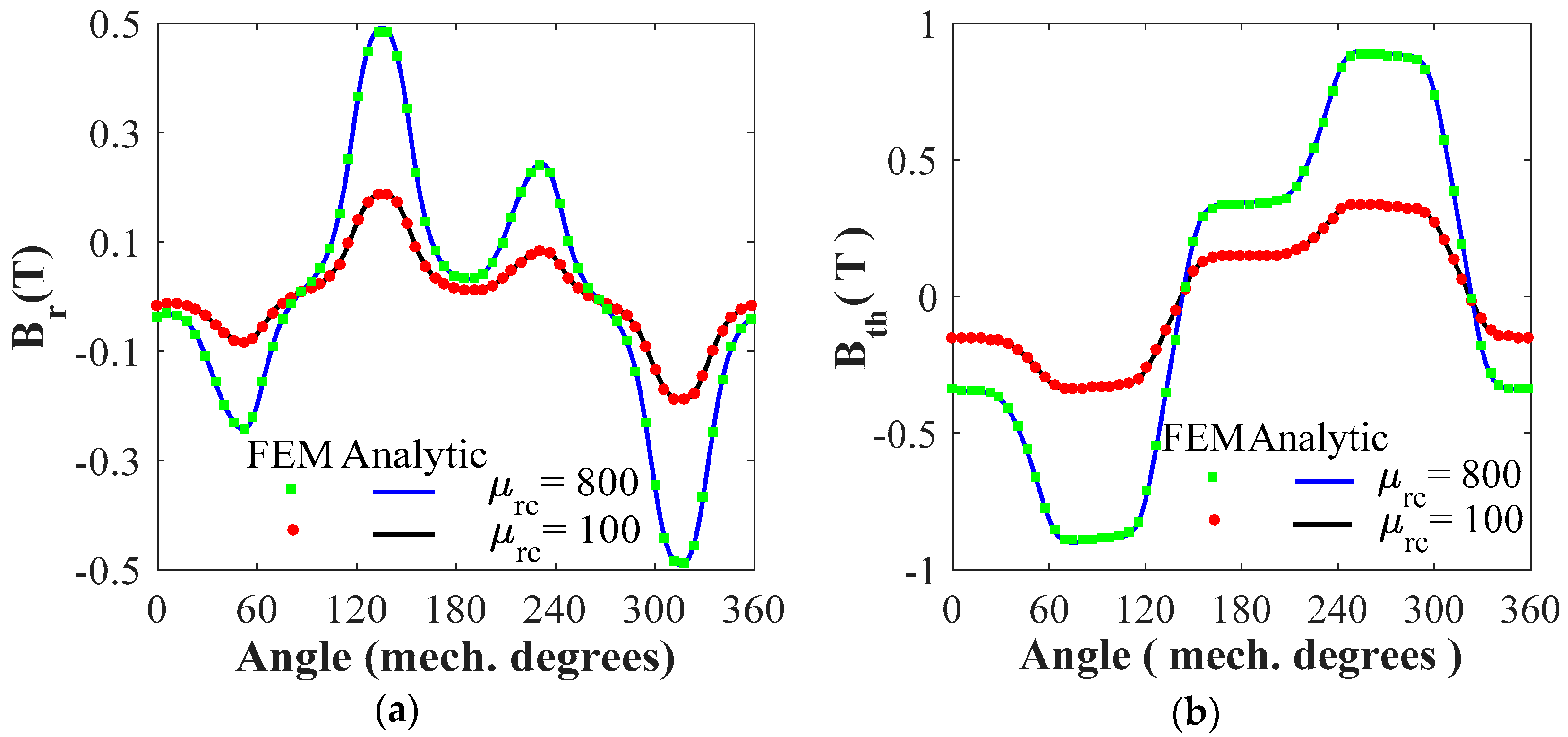
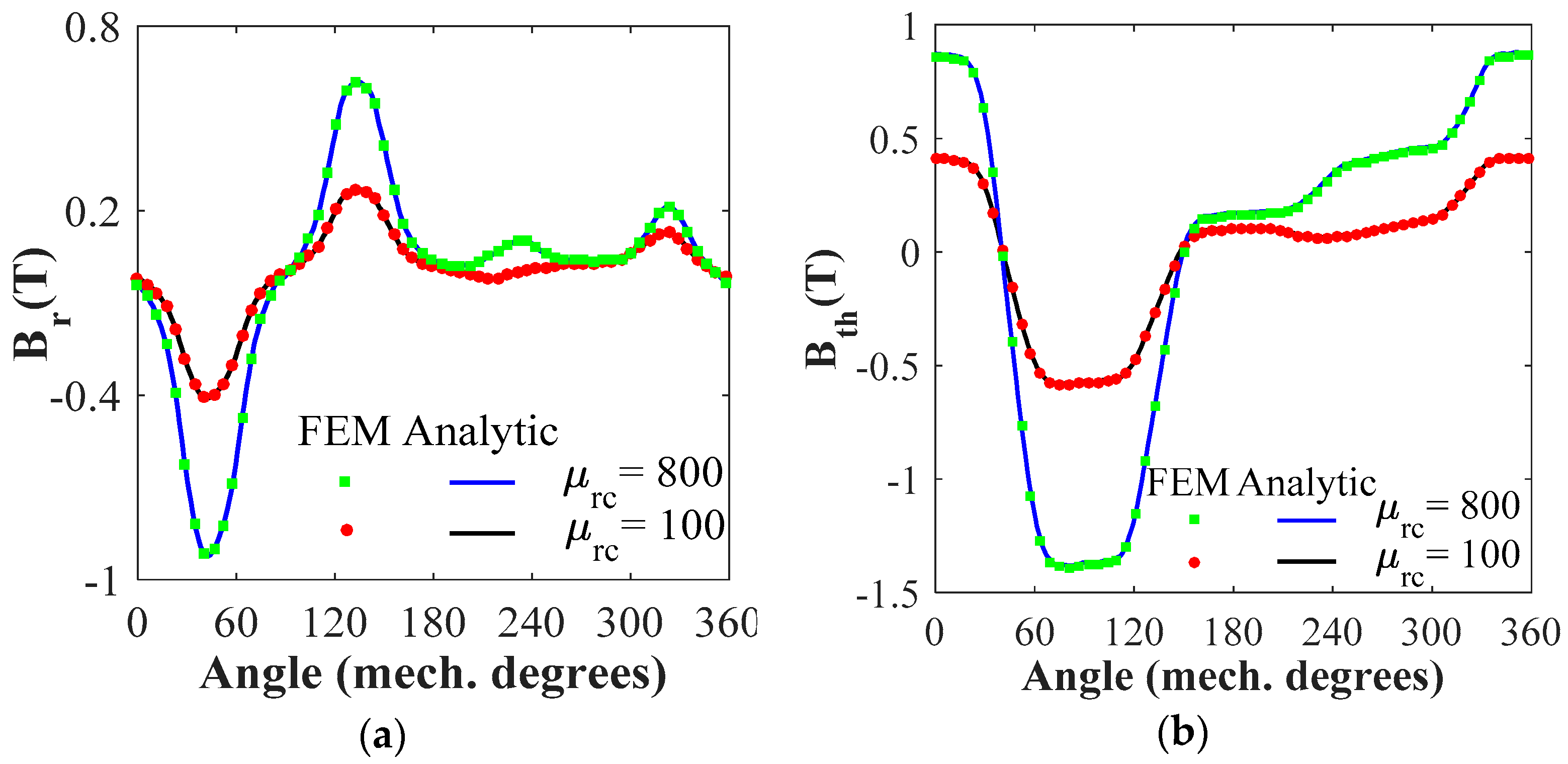
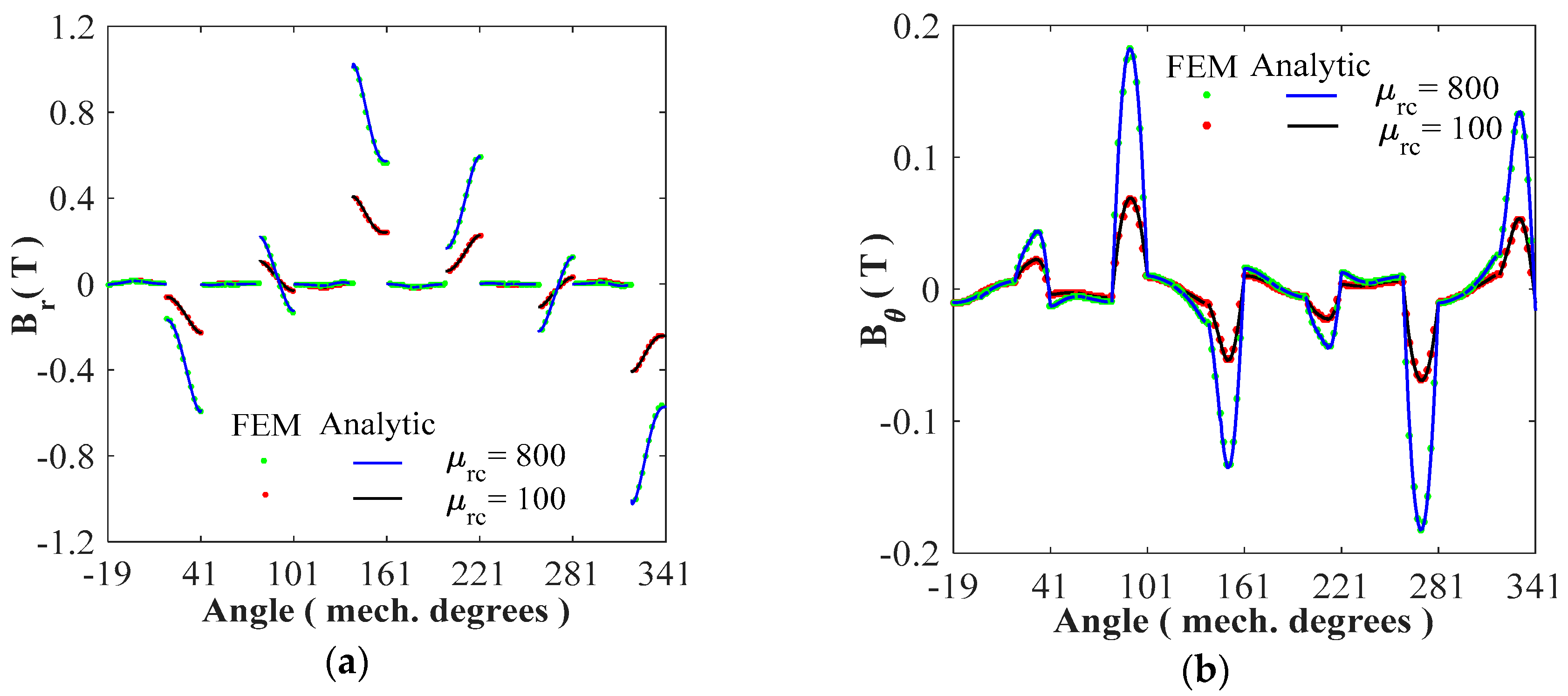
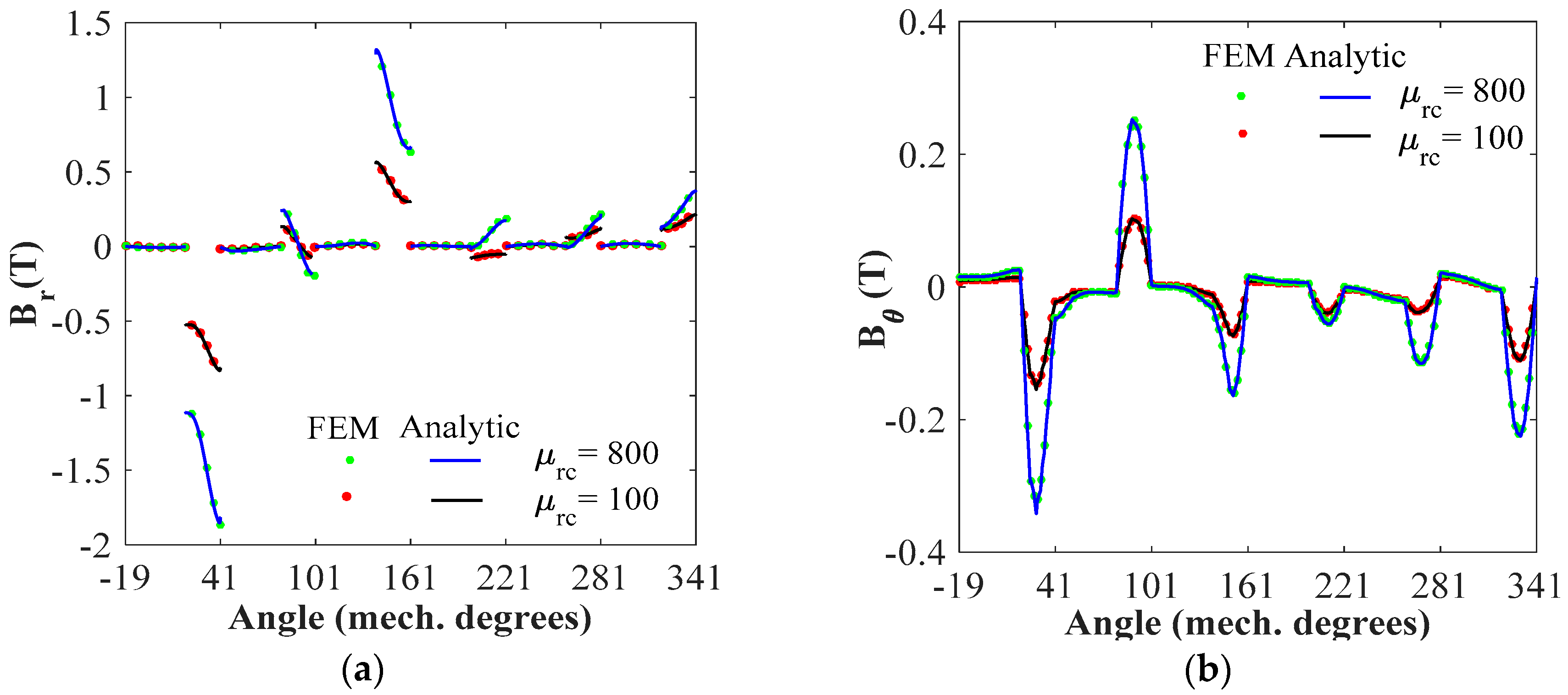
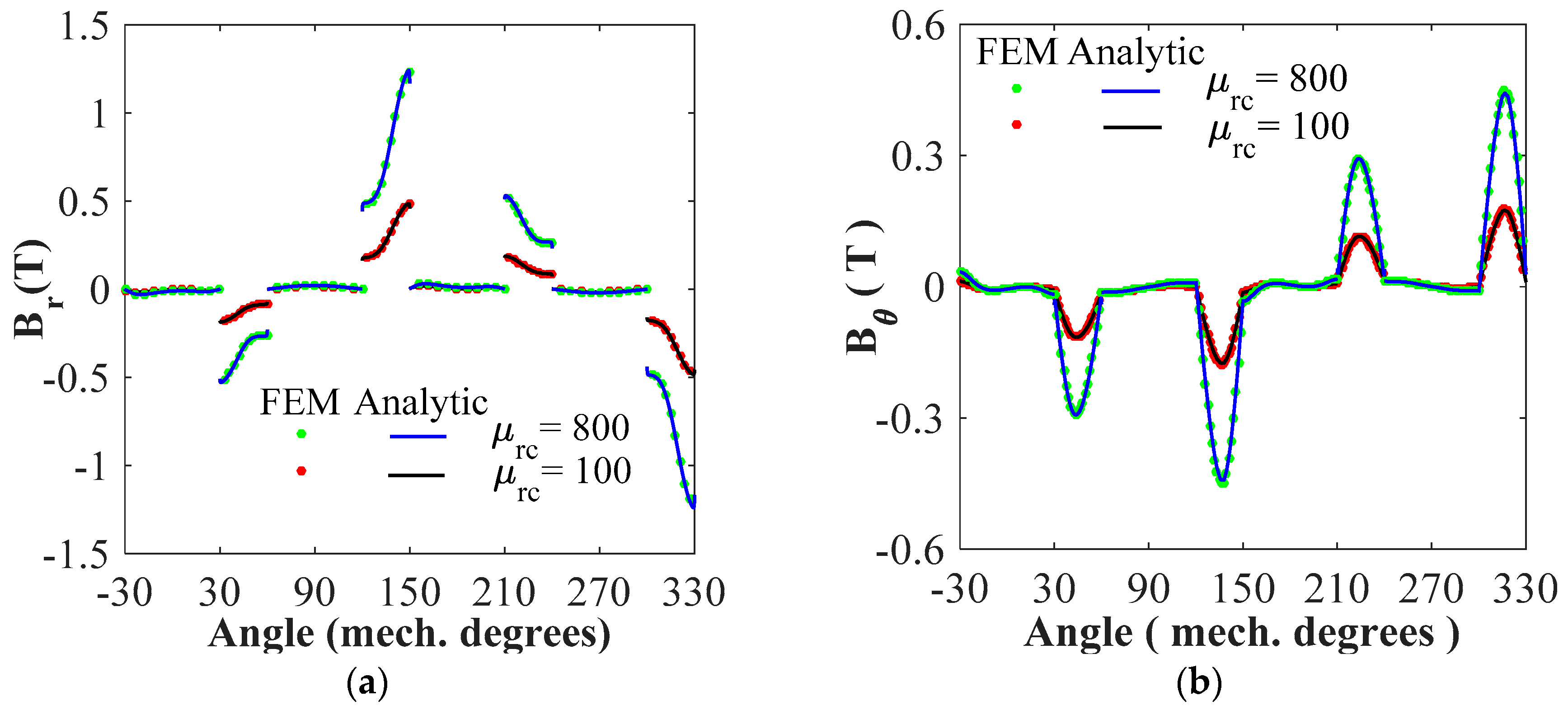
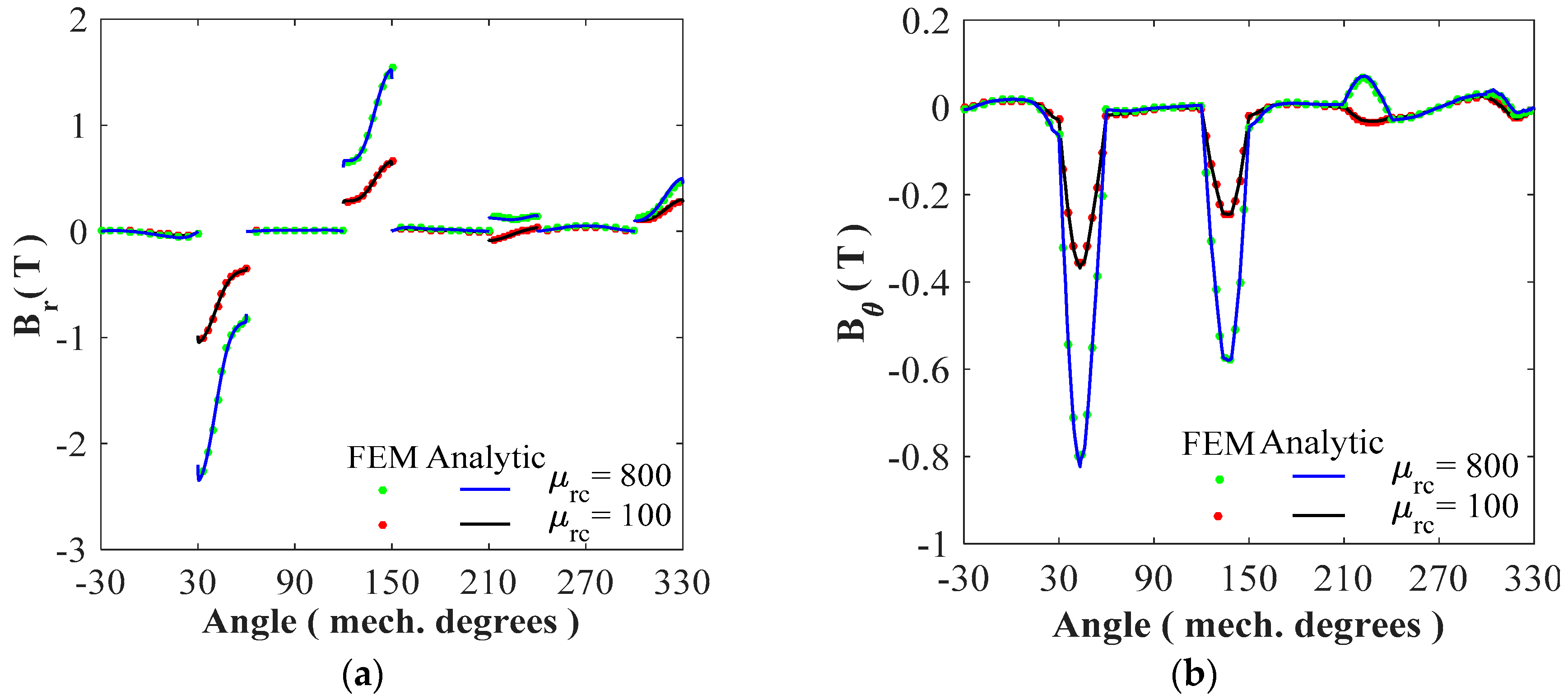
4.1. Magnetic Flux Density Distribution
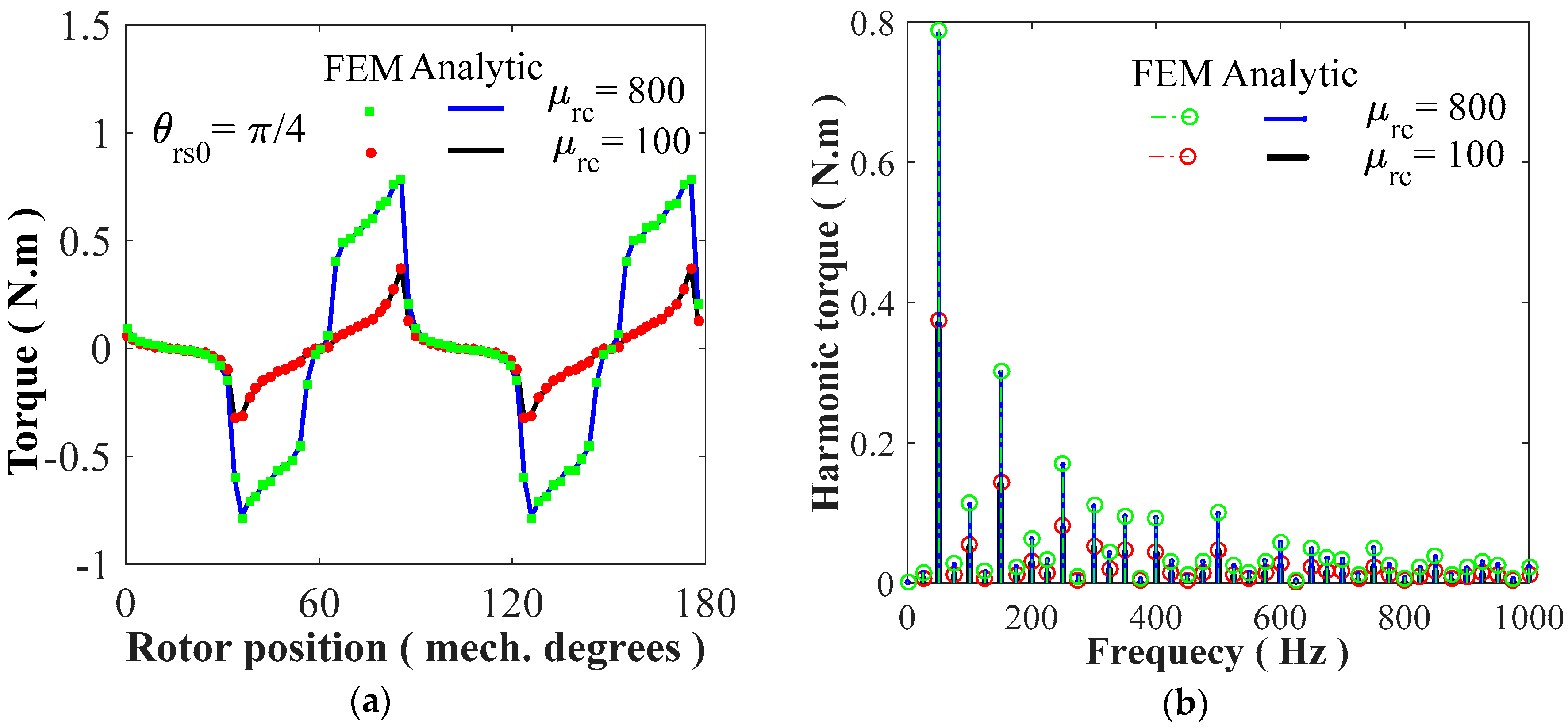
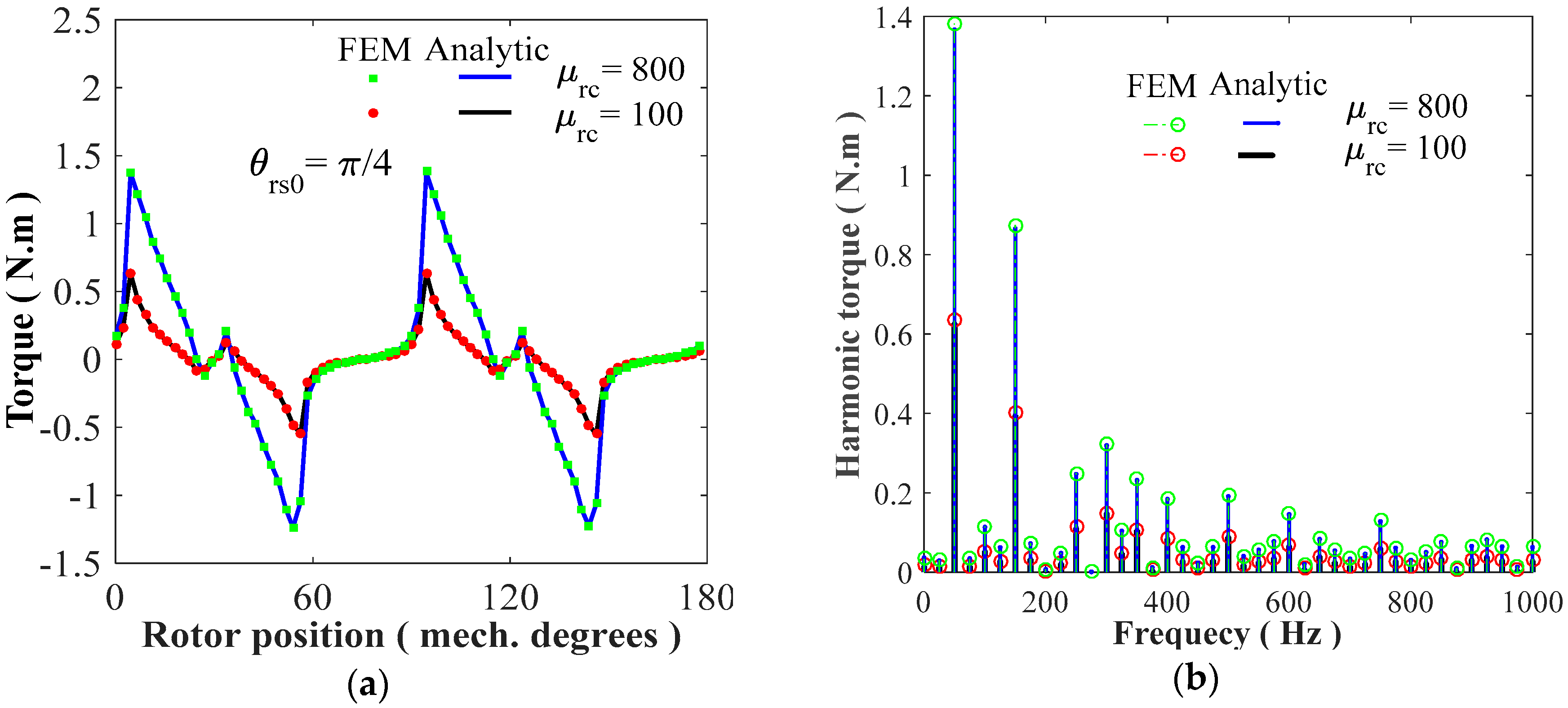
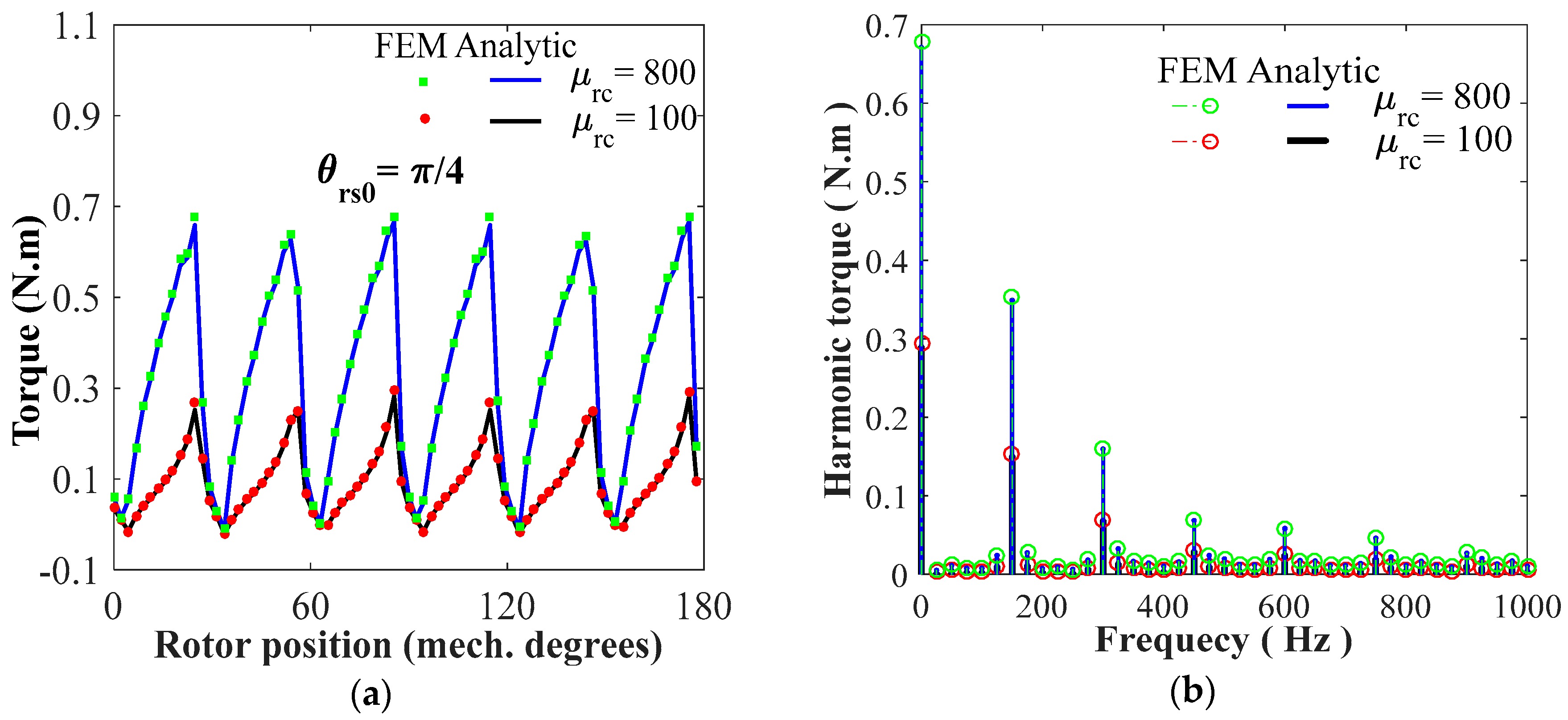
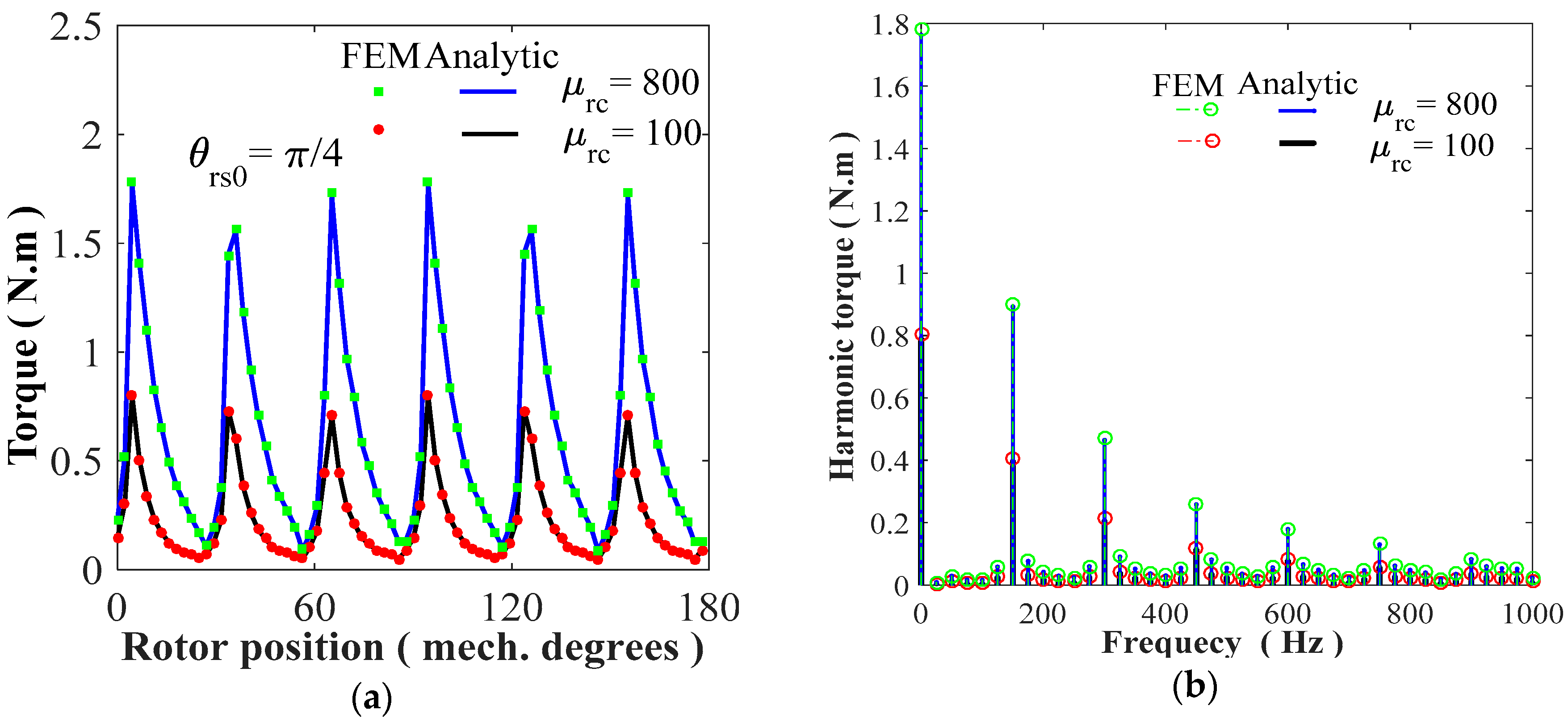
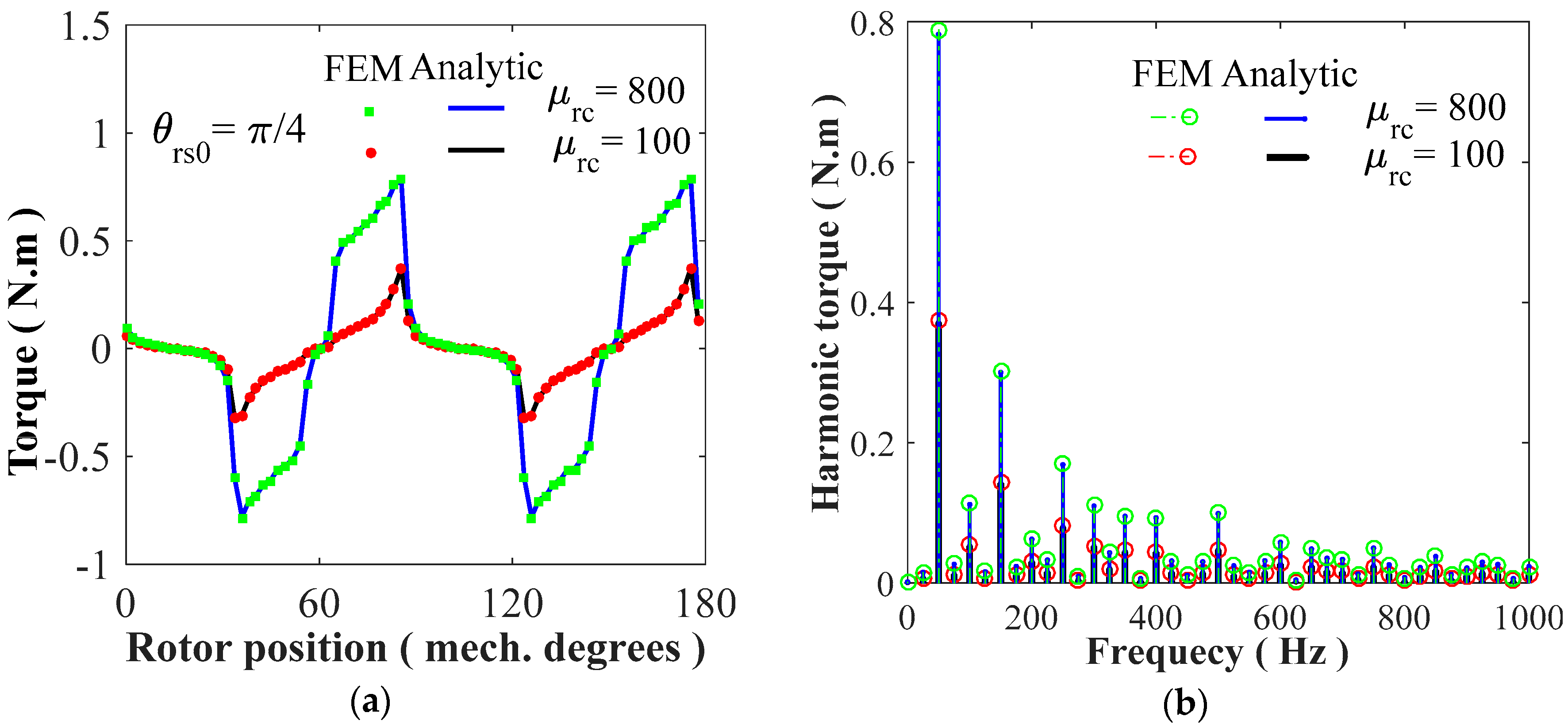
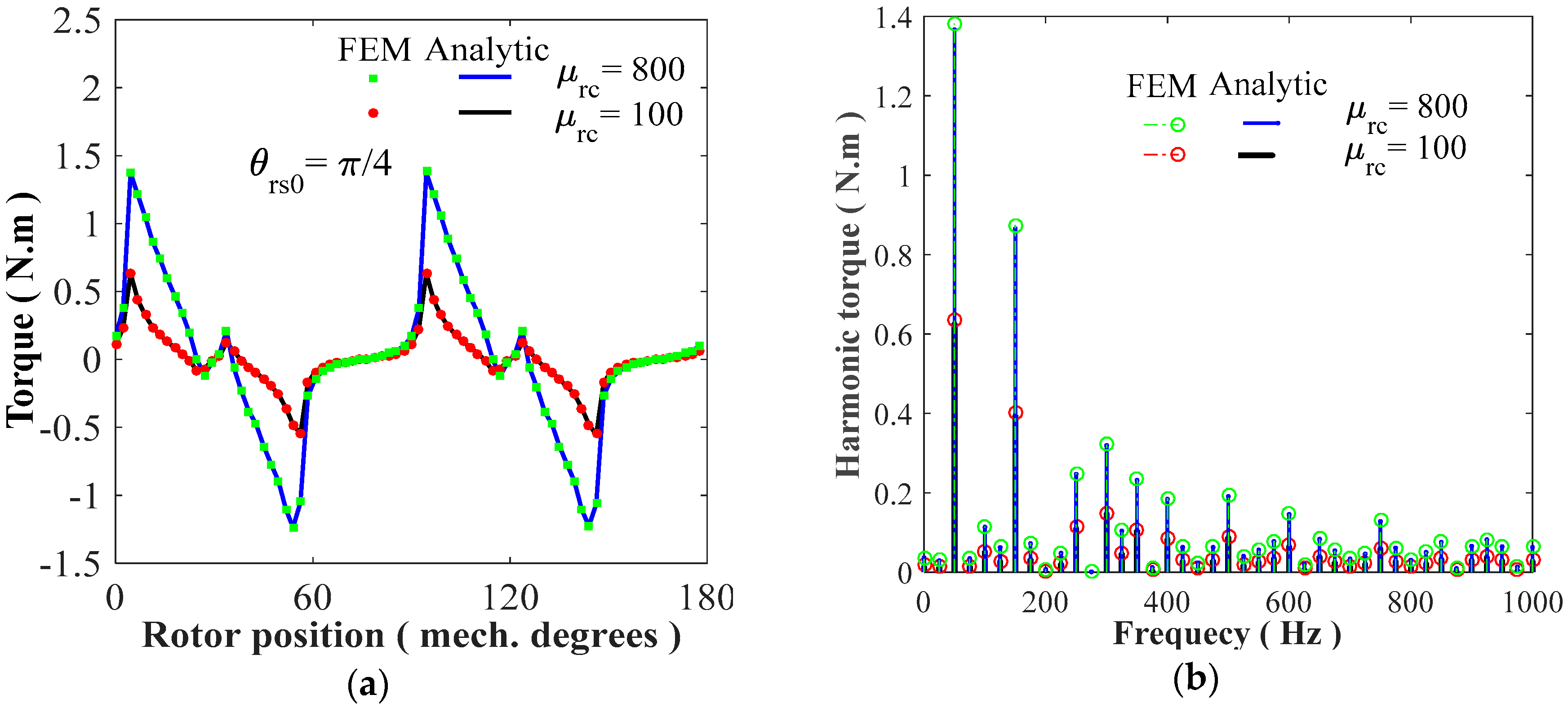
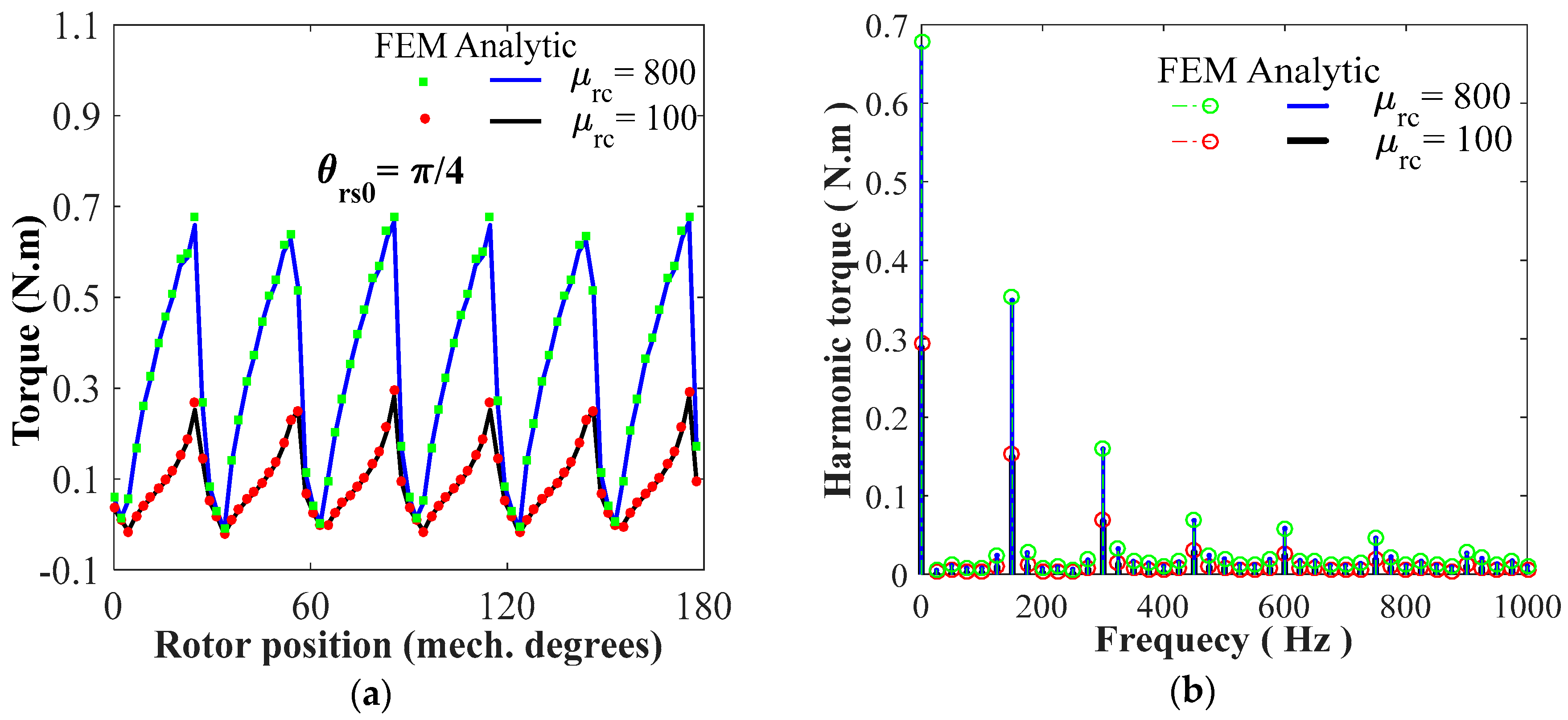
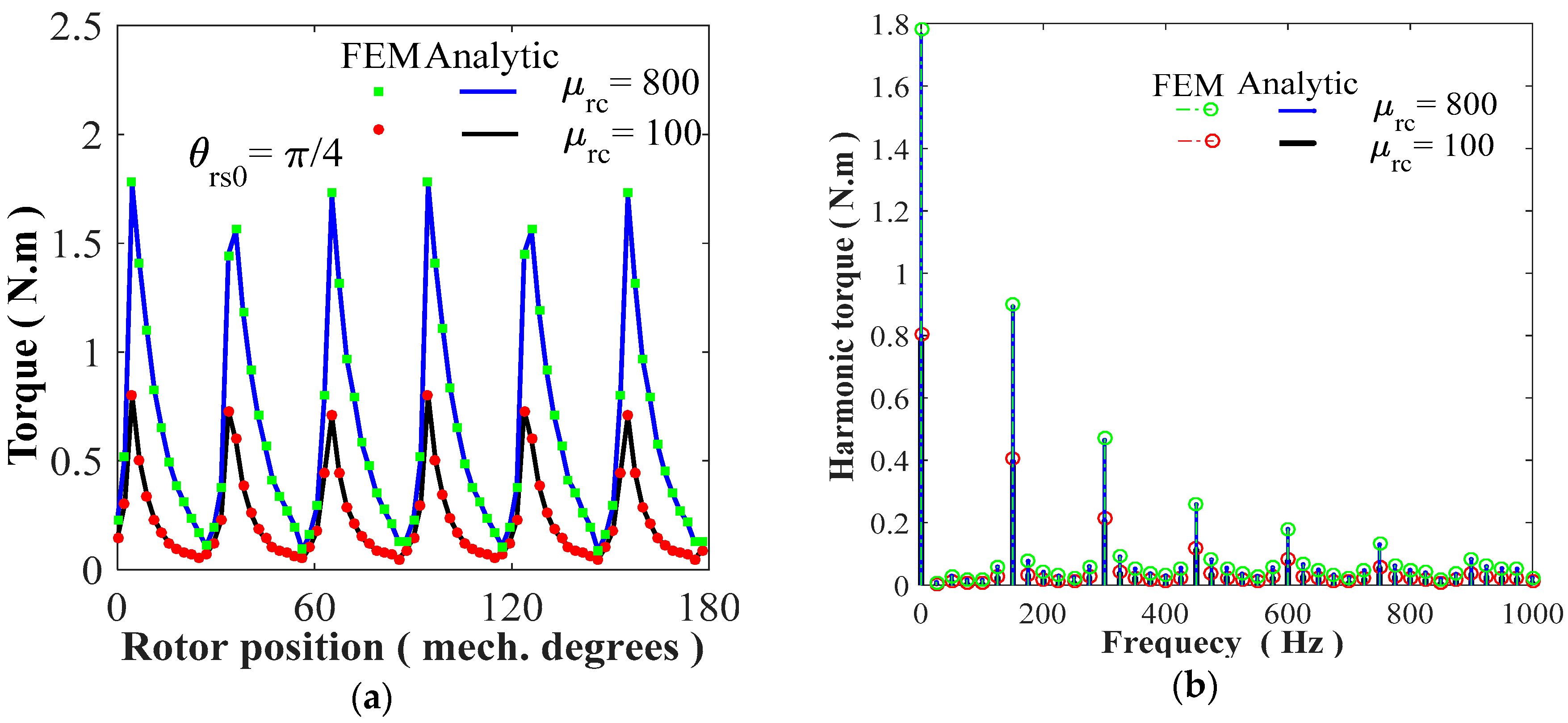
4.2. Static/Dynamic Electromagnetic Torques
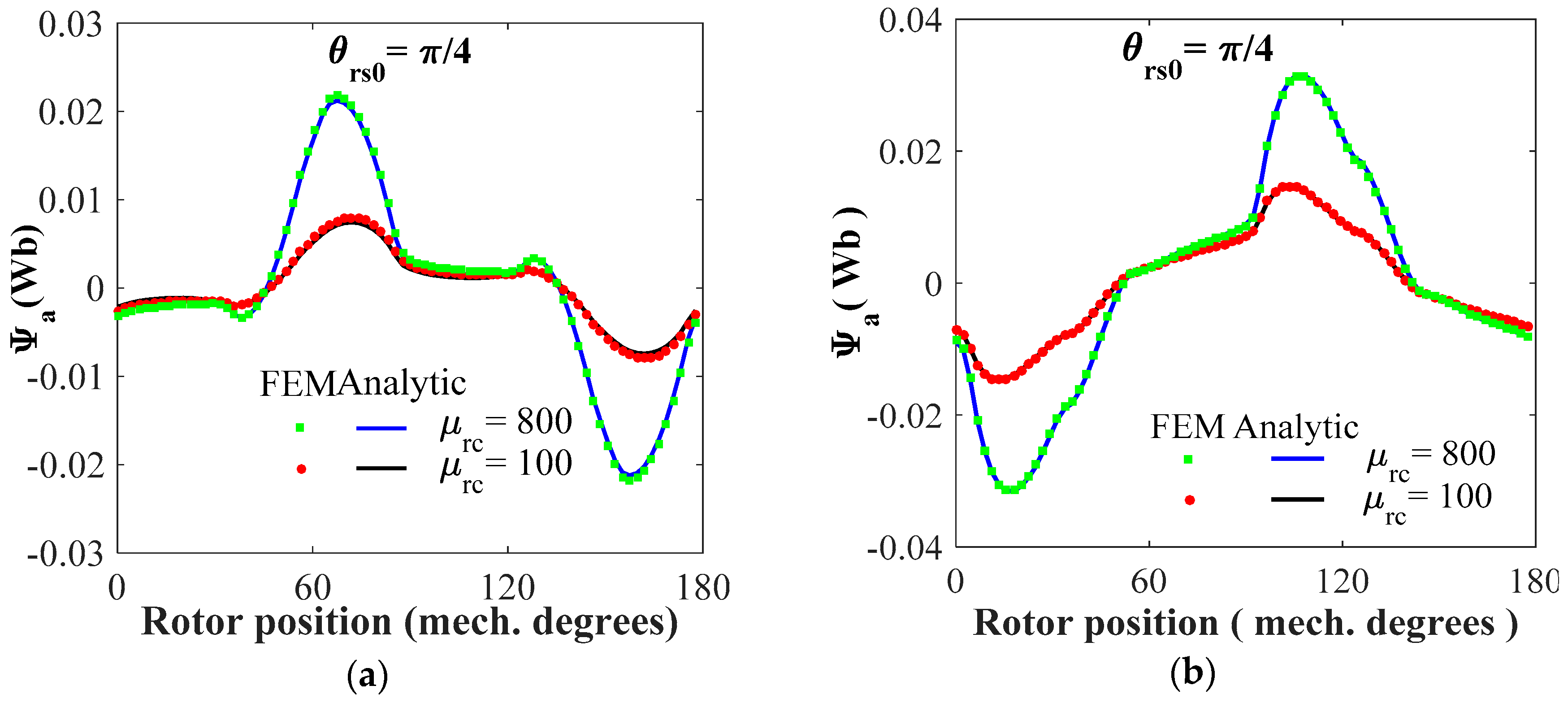
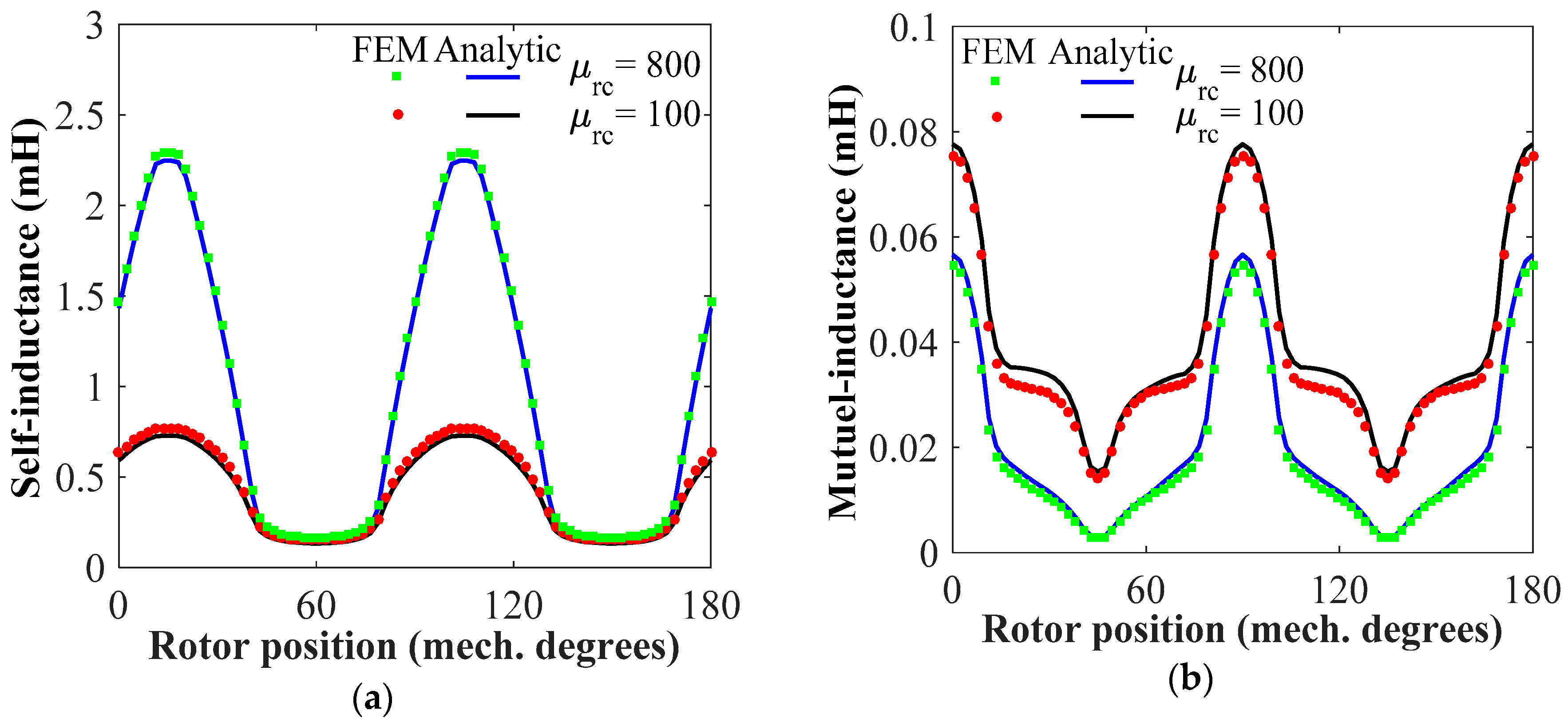
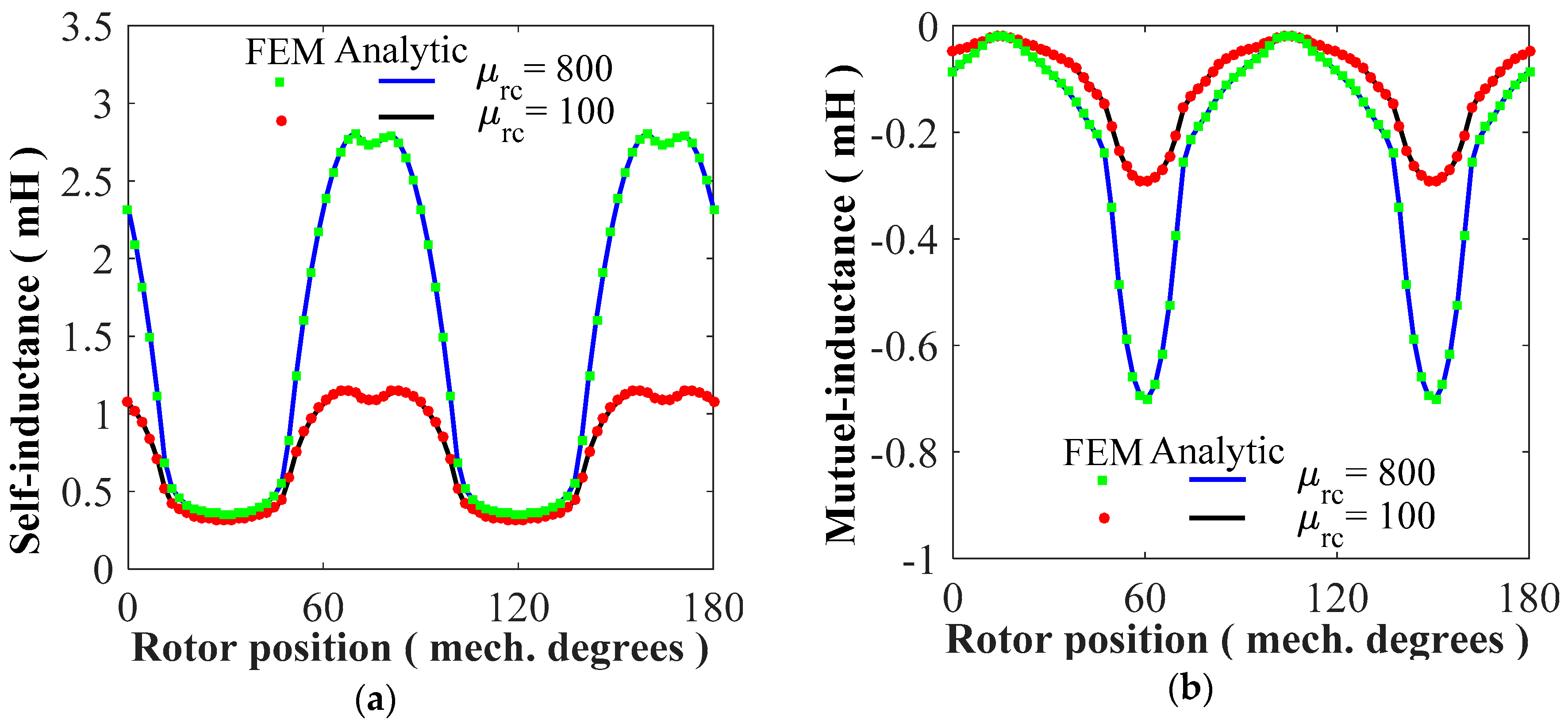
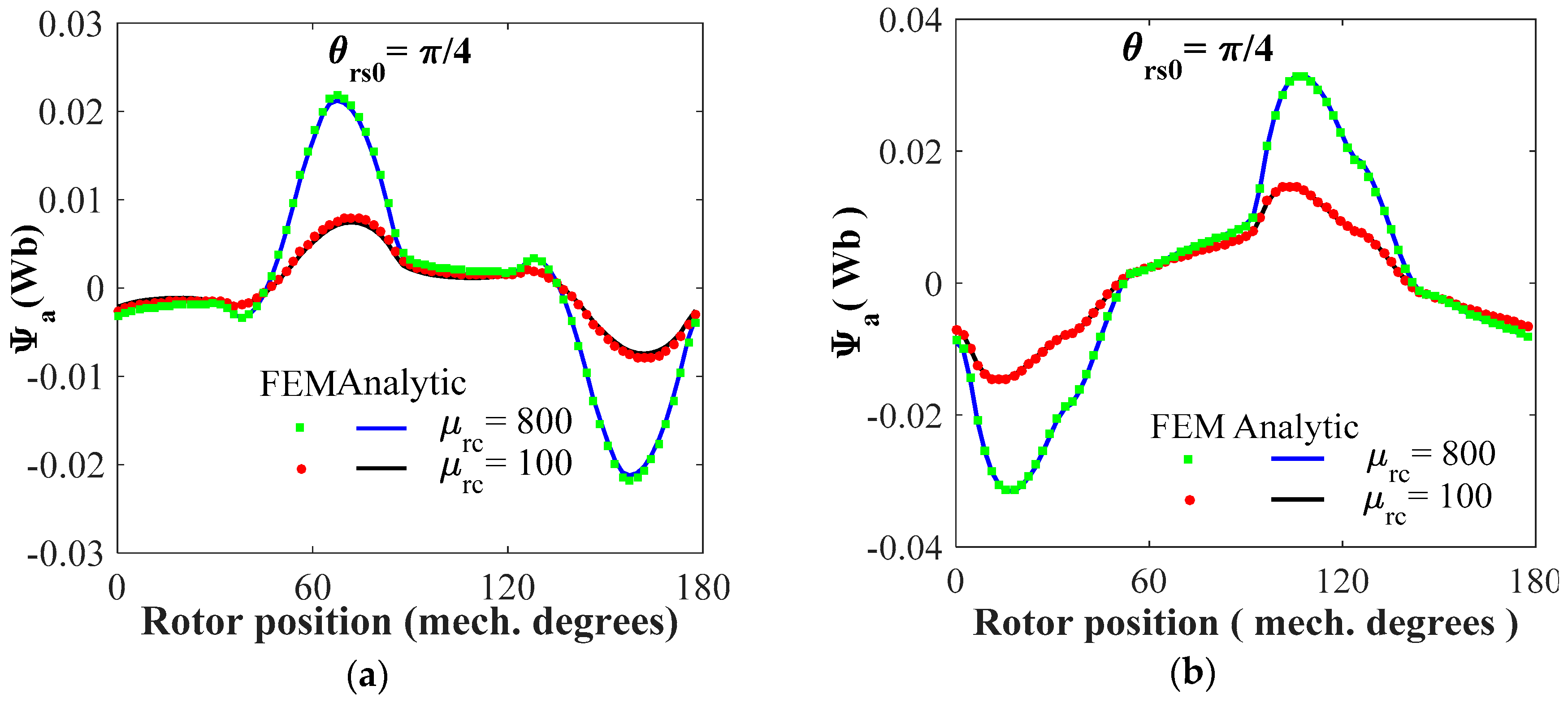
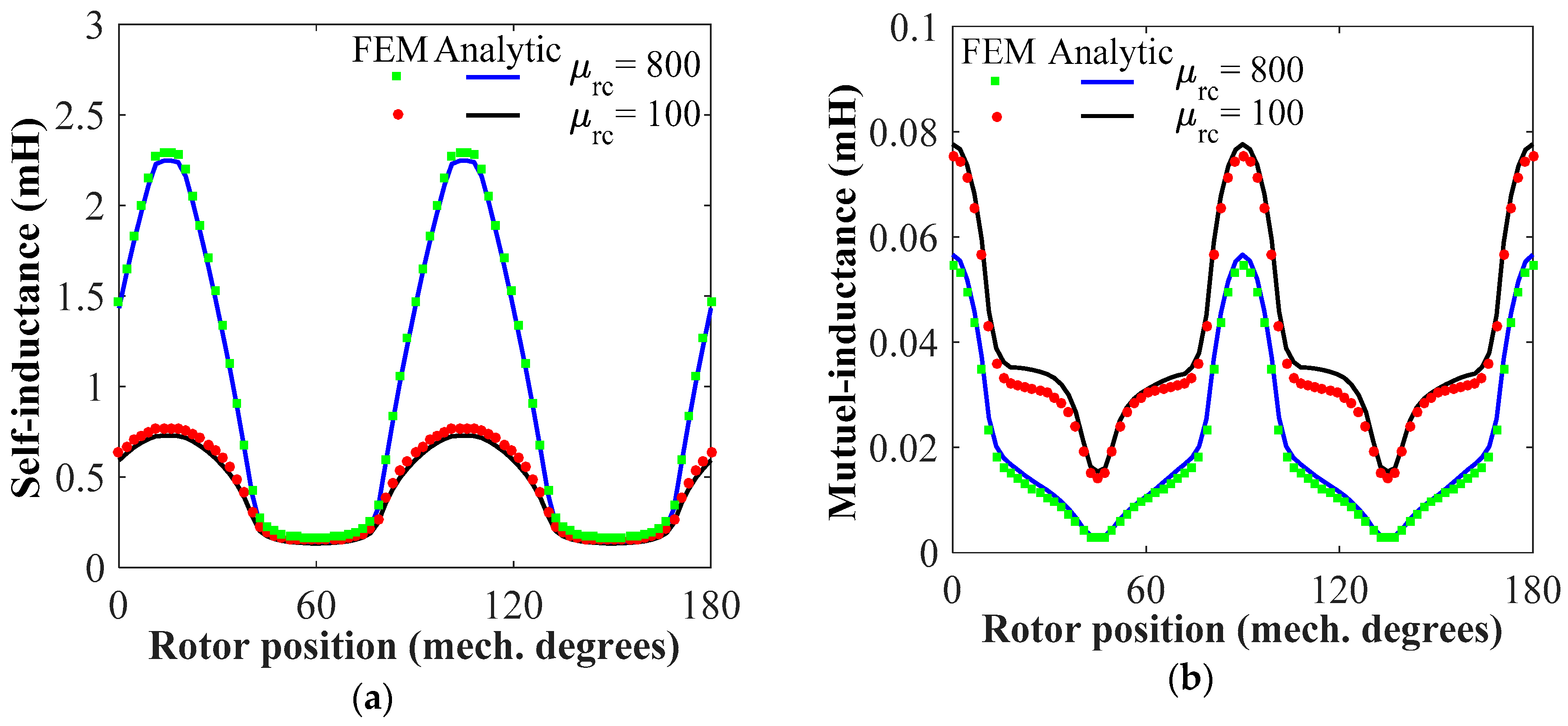
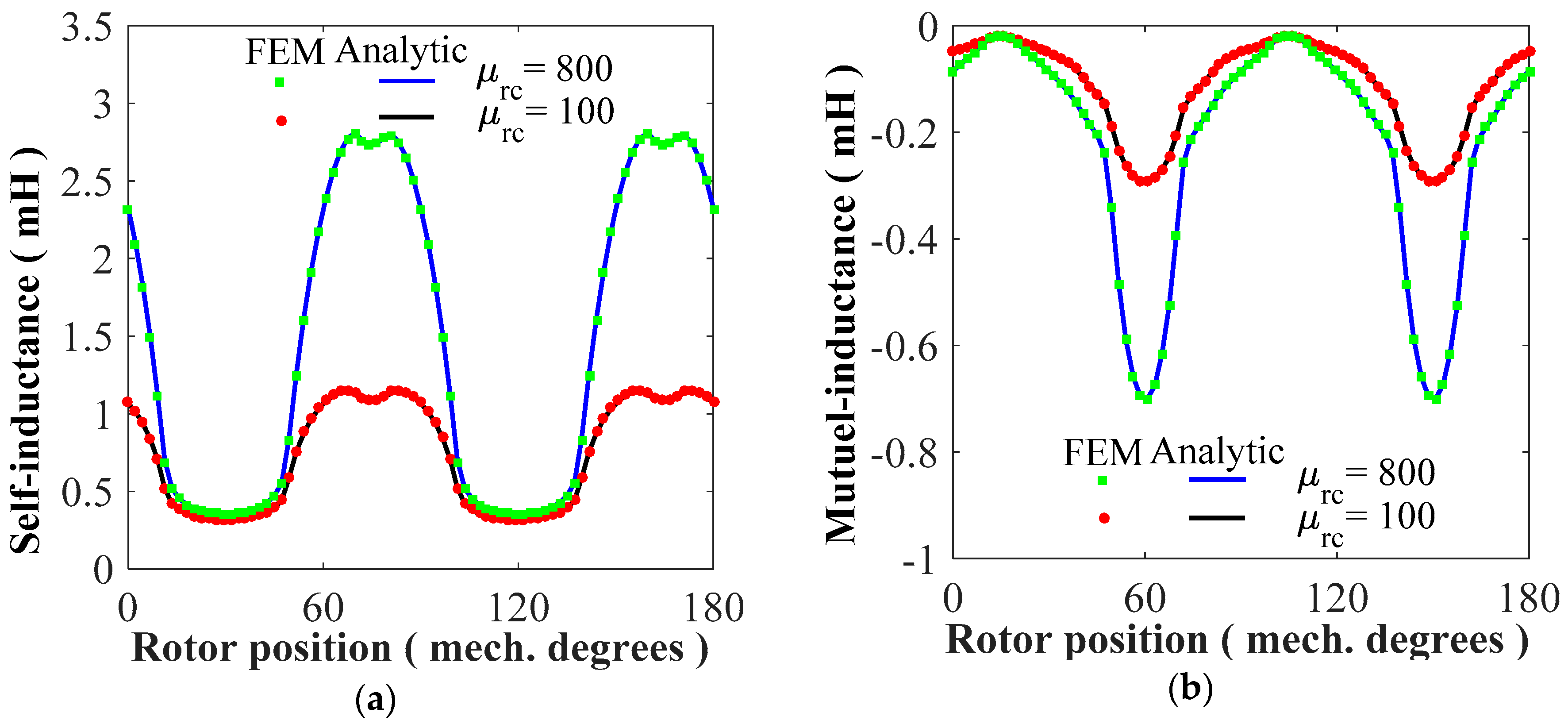
4.3. Magnetic Flux Linkage and Self-/Mutual Inductances
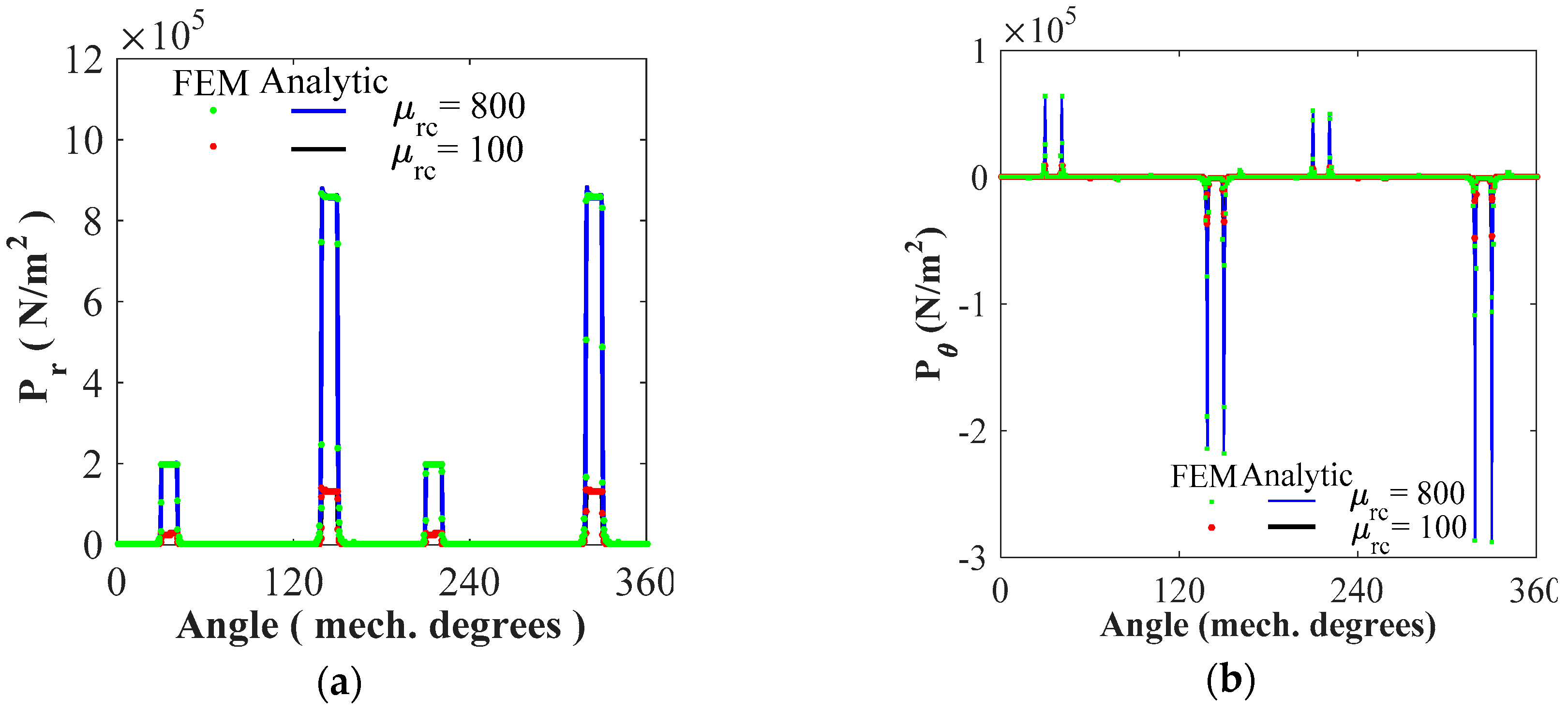
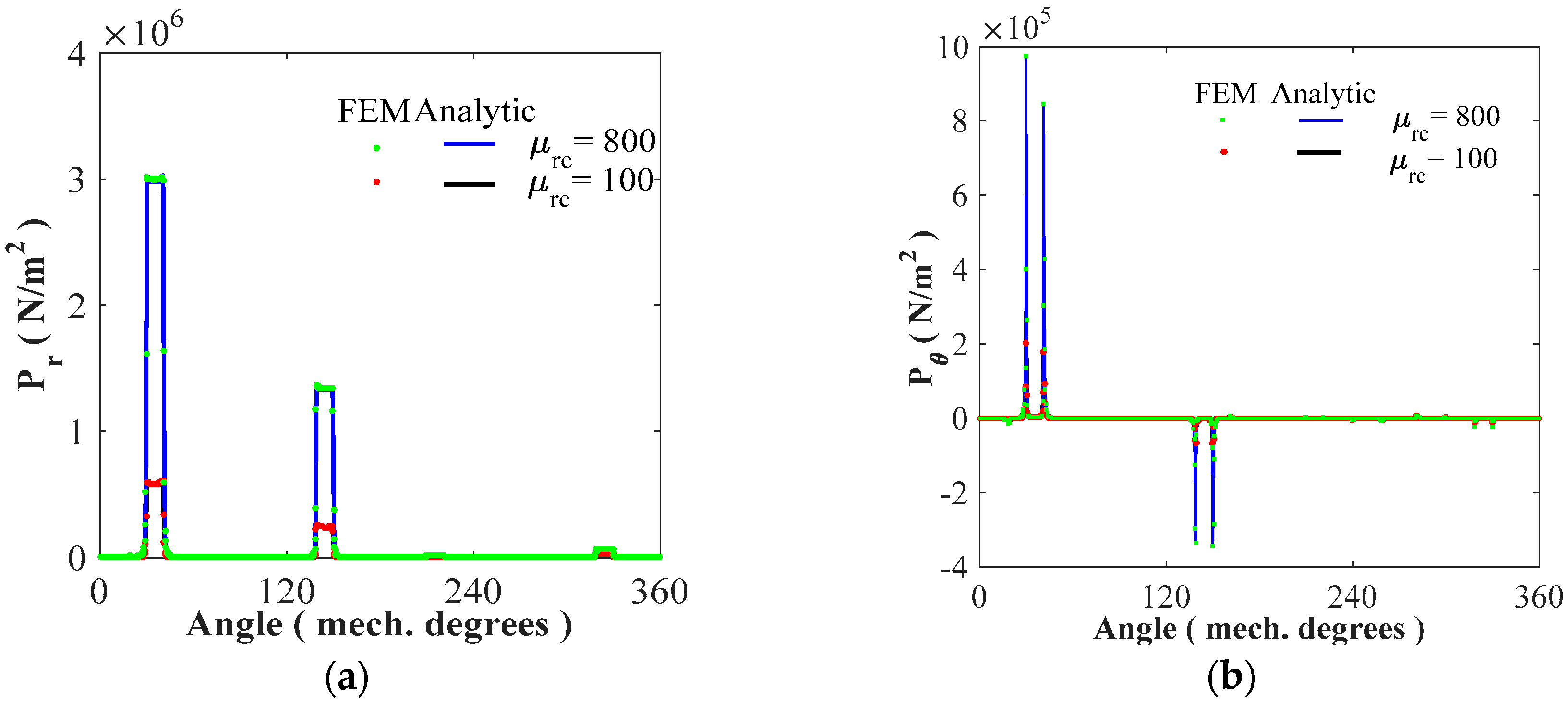
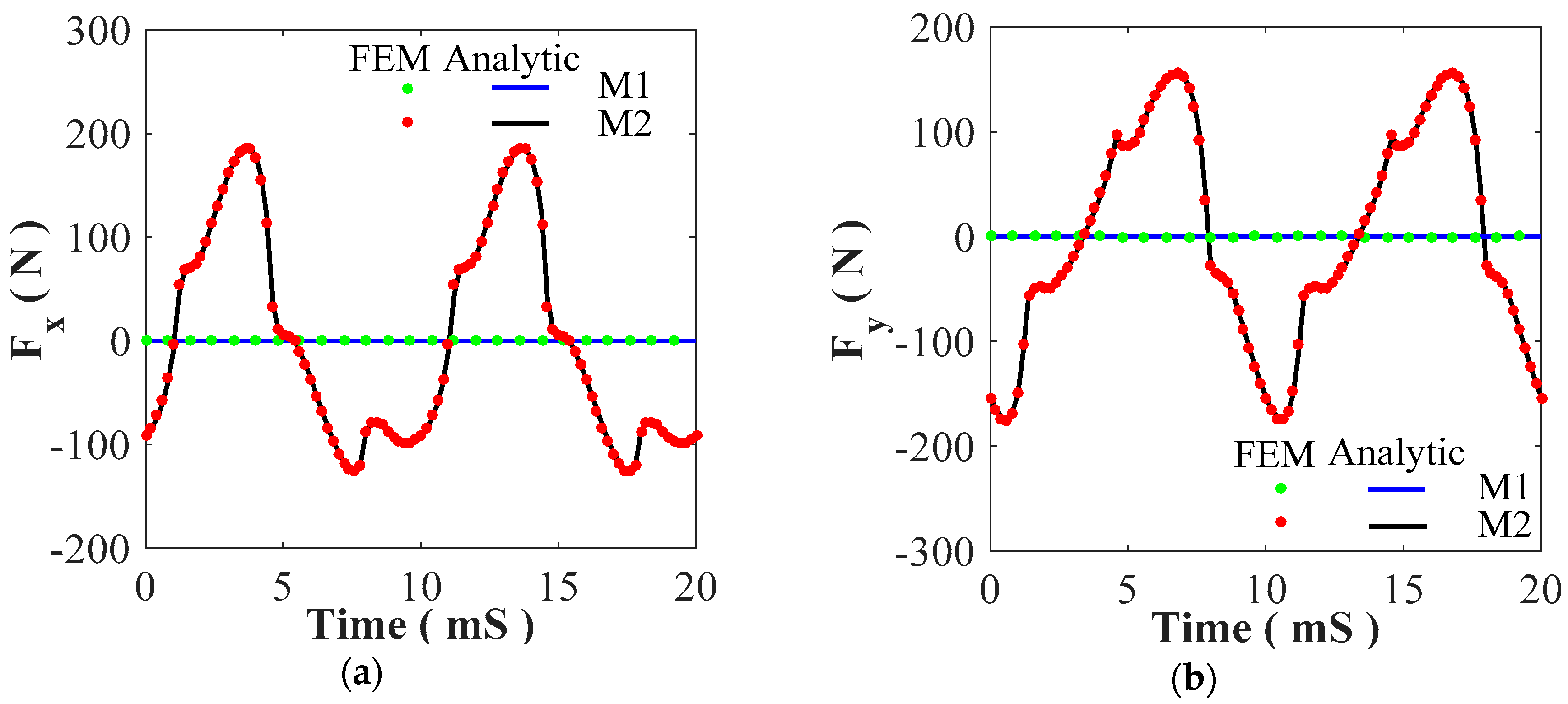
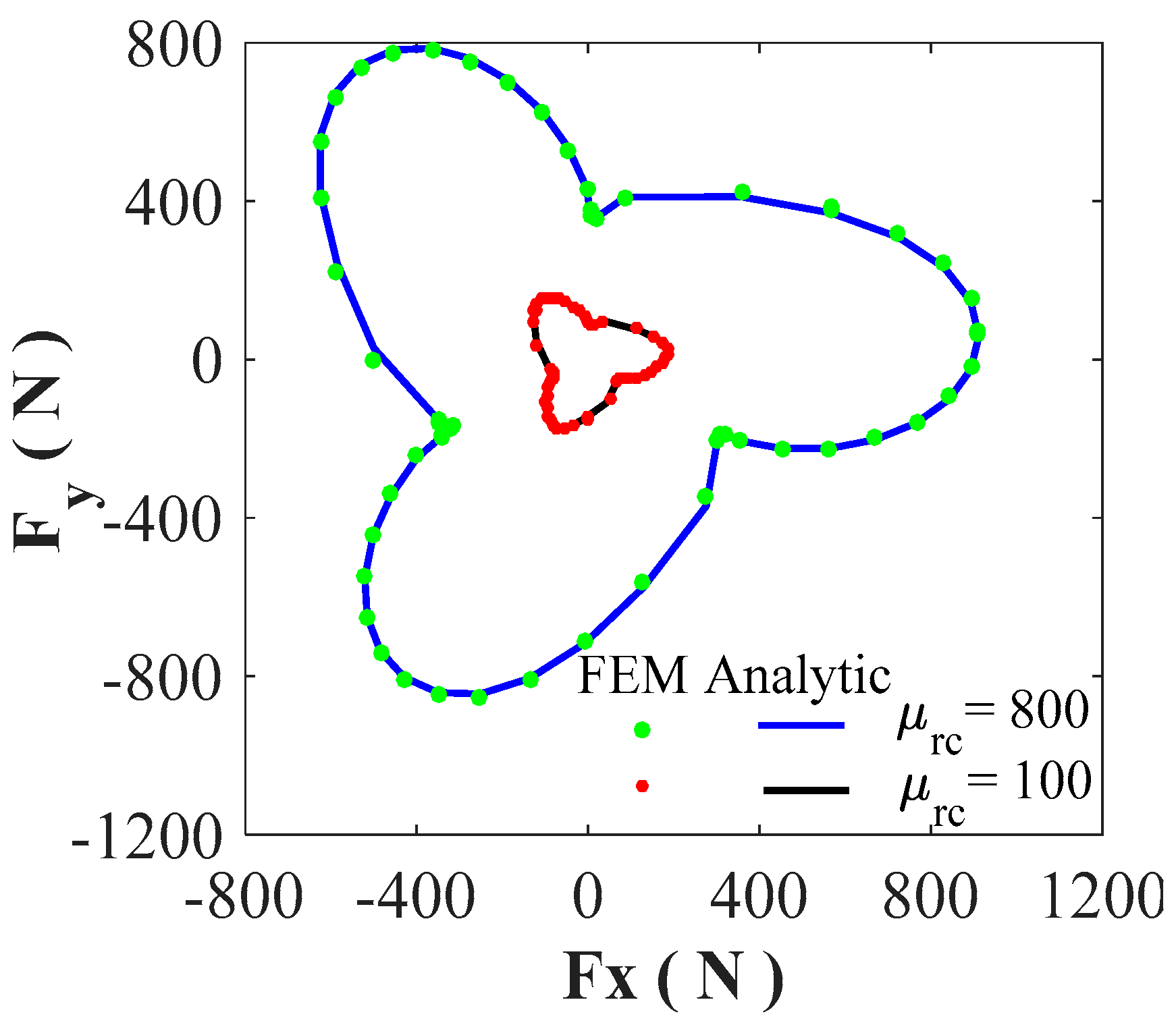
4.4. Magnetic Pressure and Non-Intrinsic UMFs
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Radimov, N.; Ben-Hail, N.; Rabinovici, R. Switched reluctance machines as three-phase AC autonomous generator. IEEE Trans. Magn. 2006, 42, 3760–3764. [Google Scholar] [CrossRef]
- Cheng, H.; Chen, H.; Yang, Z. Design indicators and structure optimisation of switched reluctance machine for electric vehicles. IET Electric Power Appl. 2015, 9, 319–331. [Google Scholar] [CrossRef]
- Takeno, M.; Chiba, A.; Hoshi, N.; Ogasawara, S.; Takemoto, M.; Rahman, A. Test results and torque improvement of the 50-kW switched reluctance motor designed for hybrid electric vehicles. IEEE Trans. Ind. Appl. 2012, 48, 1327–1334. [Google Scholar] [CrossRef]
- Li, G.J.; Ojeda, J.; Hlioui, S.; Hoang, E.; Lecrivain, M.; Gabsi, M. Modification in rotor pole geometry of mutually coupled switched reluctance machine for torque ripple mitigating. IEEE Trans. Magn. 2012, 48, 2025–2034. [Google Scholar] [CrossRef]
- Lawrenson, P.J.; Stephenson, J.M.; Blenkinsop, P.T.; Korda, J.; Fulton, N.N. Variable-speed switched reluctance motors. IEE Proc. B Electric Power Appl. 1980, 127, 253–265. [Google Scholar] [CrossRef]
- Sahin, C.; Amac, A.E.; Karacor, M.; Emadi, A. Reducing torque ripple of switched reluctance machines by relocation of rotor moulding clinches. IET Electric Power Appl. 2012, 6, 753–760. [Google Scholar] [CrossRef]
- Lin, C.; Fahimi, B. Prediction of acoustic noise in switched reluctance motor drives. IEEE Trans. Energy Convers. 2014, 29, 250–258. [Google Scholar] [CrossRef]
- Lee, D.H.; Pham, T.H.; Ahn, J.W. Design and operation characteristics of four-two pole high-speed SRM for torque ripple reduction. IEEE Trans. Ind. Electron. 2013, 60, 3637–3643. [Google Scholar] [CrossRef]
- Husain, I.; Radun, A.; Nairus, J. Unbalanced force calculation in switched reluctance machines. IEEE Trans. Magn. 2000, 36, 330–338. [Google Scholar] [CrossRef]
- Shen, L.; Wu, J. Switched reluctance motor vibration prediction: From low frequency to high frequency. In Proceedings of the IEMDC, Miami, FL, USA, 3–6 May 2009. [Google Scholar]
- Gieras, J.F.; Lai, J.C.; Wang, C. Noise of Polyphase Electric Motors; CRC/Taylor & Francis: Boca Raton, FL, USA, 2006. [Google Scholar]
- Lin, C.; Fahimi, B. Prediction of radial vibration in switched reluctance machines. IEEE Trans. Energy Convers. 2013, 28, 1072–1081. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Ishak, D.; Howe, D.; Chen, J. Unbalanced magnetic forces in permanent-magnet brushless machines with diametrically asymmetric phase windings. IEEE Trans. Ind. Appl. 2007, 43, 1544–1553. [Google Scholar] [CrossRef]
- Boughrara, K.; Ibtiouen, R.; Dubas, F. Analytical prediction of electromagnetic performances and unbalanced magnetic forces in fractional-slot spoke-type permanent-magnet machines. In Proceedings of the ICEM, Lausanne, Switzerland, 4–7 September 2016. [Google Scholar]
- Yilmaz, M.; Krein, P.T. Capabilities of finite element analysis and magnetic equivalent circuits for electrical machine analysis and design. In Proceedings of the PESC, Rhodes, Greece, 15–19 June 2008. [Google Scholar]
- Dubas, F.; Espanet, C. Analytical solution of the magnetic field in permanent-magnet motors taking into account slotting effect: No-load vector potential and flux density calculation. IEEE Trans. Magn. 2009, 45, 2097–2109. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Wu, L.J.; Xia, Z.P. An accurate subdomain model for magnetic field computation in slotted surface-mounted permanent-magnet machines. IEEE Trans. Magn. 2010, 46, 1100–1115. [Google Scholar] [CrossRef]
- Tiegna, H.; Amara, Y.; Barakat, G. Overview of analytical models of permanent magnet electrical machines for analysis and design purposes. Math. Comput. Simul. 2013, 90, 162–177. [Google Scholar] [CrossRef]
- Dubas, F.; Rahideh, A. Two-dimensional analytical permanent-magnet eddy-current loss calculations in slotless PMSM equipped with surface-inset magnets. IEEE Trans. Magn. 2014, 50, 54–73. [Google Scholar] [CrossRef]
- Curti, M.; Paulides, J.J.H.; Lomonova, E.A. An overview of analytical methods for magnetic field computation. In Proceedings of the EVER, Grimaldi Forum, Monte Carlo, Monaco, 31 March–2 April 2015. [Google Scholar]
- Sprangers, R.L.J.; Paulides, J.J.H.; Gysen, B.L.J.; Lomonova, E.A. Magnetic saturation in semi-analytical harmonic modeling for electric machine analysis. IEEE Trans. Magn. 2016, 52, 1–10. [Google Scholar] [CrossRef]
- Pfister, P.-D.; Yin, X.; Fang, Y. Slotted permanent-magnet machines: General analytical model of magnetic fields, torque, eddy currents, and permanent-magnet power losses including the diffusion effect. IEEE Trans. Magn. 2016, 52, 1–13. [Google Scholar] [CrossRef]
- Devillers, E.; Besnerais, J.L.; Lubin, T.; Hecquet, M.; Lecointe, J.-P. A review of subdomain modeling techniques in electrical machines: Performances and applications. In Proceedings of the ICEM, Lausanne, Switzerland, 4–7 September 2016. [Google Scholar]
- Dubas, F.; Boughrara, K. New scientific contribution on the 2-D subdomain technique in Cartesian coordinates: Taking into account of iron parts. Math. Comput. Appl. 2017, 22, 17. [Google Scholar] [CrossRef]
- Boughrara, K.; Lubin, T.; Ibtiouen, R. General subdomain model for predicting magnetic field in internal and external rotor multiphase flux-switching machines topologies. IEEE Trans. Magn. 2013, 49, 5310–5325. [Google Scholar] [CrossRef]
- Dubas, F.; Boughrara, K. New scientific contribution on the 2-D subdomain technique in polar coordinates: Taking into account of iron parts. Math. Comput. Appl. 2017, 22, 42. [Google Scholar] [CrossRef]
- Roubache, L.; Boughrara, K.; Dubas, F.; Ibtiouen, R. Semi-analytical modeling of spoke-type permanent-magnet machines considering the iron core relative permeability: Subdomain technique and Taylor polynomial. Prog. Electromagn. Res. B 2017, 77, 85–101. [Google Scholar] [CrossRef]
- Roubache, L.; Boughrara, K.; Dubas, F.; Ibtiouen, R. Semi-analytical modeling of spoke-type permanent-magnet machines considering nonlinear magnetic saturation: Subdomain technique and Taylor polynomial. Math. Comput. Simul. 2018. to be published. [Google Scholar]
- Sprangers, R.L.J.; Paulides, J.J.H.; Gysen, B.L.J.; Waarma, J.; Lomonova, E.A. Semi-analytical framework for synchronous reluctance motor analysis including finite soft-magnetic material permeability. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Ramakrishnan, K.; Curti, M.; Zarko, D.; Mastinu, G.; Paulides, J.J.H.; Lomonova, E.A. Comparative analysis of various methods for modelling surface permanent magnet machines. IET Electric Power Appl. 2017, 11, 540–547. [Google Scholar] [CrossRef]
- Djelloul, K.Z.; Boughrara, K.; Dubas, F.; Kechroud, A.; Souleyman, B. Semi-analytical magnetic field predicting in many structures of permanent-magnet synchronous machines considering the iron permeability. IEEE Trans. Magn. 2018, 54, 8103921. [Google Scholar]
- Djelloul, K.Z.; Boughrara, K.; Ibtiouen, R.; Dubas, F. Nonlinear analytical calculation of magnetic field and torque of switched reluctance machines. In Proceedings of the CISTEM, Marrakech, Morocco, 26–28 October 2016. [Google Scholar]
- Djelloul, K.Z.; Boughrara, K.; Dubas, F.; Ibtiouen, R. Nonlinear analytical prediction of magnetic field and electromagnetic performances in switched reluctance machines. IEEE Trans. Magn. 2017, 53, 1–11. [Google Scholar] [CrossRef]
- Roubache, L.; Boughrara, K.; Dubas, F.; Ibtiouen, R. New subdomain technique for electromagnetic performances calculation in radial-flux electrical machines considering finite soft-magnetic material permeability. IEEE Trans. Magn. 2018, 54, 8103315. [Google Scholar] [CrossRef]
- Boughrara, K.; Dubas, F.; Ibtiouen, R. 2-D exact analytical method for steady-state heat transfer prediction in rotating electrical machines. IEEE Trans. Magn. 2018, 54, 1–19. [Google Scholar] [CrossRef]
- Roubache, L.; Boughrara, K.; Dubas, F.; Ibtiouen, R. Elementary subdomain technique for magnetic field calculation in rotating electrical machines with local saturation effect. Int. J. Comput. Math. Electr. Electron. Eng. 2018. [Google Scholar] [CrossRef]
- Hannon, B.; Sergeant, P.; Dupré, L. Two-dimensional Fourier-based modeling of electric machines. In Proceedings of the IEMDC, Miami, FL, USA, 21–24 May 2017. [Google Scholar]
- Meeker, D.C. Finite Element Method Magnetics ver. 4.2. Available online: www.femm.info/wiki/download (accessed on 10 October 2018).
- Ouamara, D.; Dubas, F.; Benallal, M.N.; Randi, S.A.; Espanet, C. Automatic winding generation using matrix representation—ANFRACTUS TOOL 1.0. Acta Polytech. 2018, 58, 37–46. [Google Scholar] [CrossRef]
- Islam, R.; Husain, I. Analytical model for predicting noise and vibration in permanent-magnet synchronous motors. IEEE Trans. Ind. Appl. 2010, 46, 2346–2354. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters, Symbols [Units] | Values | |
|---|---|---|
| M1 Double Layer | M2 Single Layer | |
| Winding distribution | Concentrated | |
| Number of stator slots, Qs [-] | 6 | |
| Number of rotor poles, Qr [-] | 4 | |
| Radius of the external stator surface, Rext [mm] | 45 | |
| External radius of stator slot, R5 [mm] | 36 | |
| Radius of the internal stator surface, R4 [mm] | 25.7 | |
| Radius of the rotor surface, R3 [mm] | 25.5 | |
| Internal radius of rotor slot, R2 [mm] | 17.3 | |
| Radius of the shaft, R1 [mm] | 10 | |
| Air gap thickness, g [mm] | 0.2 | |
| Axial length of the machine, Lu [mm] | 60 | |
| Rotor slot-opening, a [deg.] | 60 | |
| Rotor tooth-opening, b [deg.] | 30 | |
| Stator slot opening, c [deg.] | 38 | |
| Stator tooth opening, d [deg.] | 22 | |
| Non-periodic air gap (i.e., between the two-layer winding of stator slots) opening, e [deg.] | 4 | 0 |
| Opening of a slot coil, f [deg.] | 17 | 38 |
| Number of conductor of slot coil, Nc [-] | 20 | 40 |
| Phase current, I [A] | 15 | |
| Current density of the coil, J [A/mm²] | 3.18 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ben Yahia, M.; Boughrara, K.; Dubas, F.; Roubache, L.; Ibtiouen, R. Two-Dimensional Exact Subdomain Technique of Switched Reluctance Machines with Sinusoidal Current Excitation. Math. Comput. Appl. 2018, 23, 59. https://doi.org/10.3390/mca23040059
Ben Yahia M, Boughrara K, Dubas F, Roubache L, Ibtiouen R. Two-Dimensional Exact Subdomain Technique of Switched Reluctance Machines with Sinusoidal Current Excitation. Mathematical and Computational Applications. 2018; 23(4):59. https://doi.org/10.3390/mca23040059
Chicago/Turabian StyleBen Yahia, Mohammed, Kamel Boughrara, Frédéric Dubas, Lazhar Roubache, and Rachid Ibtiouen. 2018. "Two-Dimensional Exact Subdomain Technique of Switched Reluctance Machines with Sinusoidal Current Excitation" Mathematical and Computational Applications 23, no. 4: 59. https://doi.org/10.3390/mca23040059
APA StyleBen Yahia, M., Boughrara, K., Dubas, F., Roubache, L., & Ibtiouen, R. (2018). Two-Dimensional Exact Subdomain Technique of Switched Reluctance Machines with Sinusoidal Current Excitation. Mathematical and Computational Applications, 23(4), 59. https://doi.org/10.3390/mca23040059