1. Introduction
A polynomial
with real coefficients is called Schur stable if all its roots lie in the open unit disc of the complex plane. Schur stability is very important in the investigation of discrete-time systems. One of the ways to investigate of Schur stability is the use of the well-known bilinear transformation between the open left half plane and the open unit disc. By using this transformation, the Schur stability problem of a given system can be transformed into Hurwitz stability problem of transformed polynomial (Recall that a system is called Hurwitz stable if all roots of its characteristic polynomial belong to the open left half plane) [
1,
2,
3,
4,
5].
Each polynomial
corresponds to an
n-dimensional vector
. The vector
p is called stable if the corresponding monic polynomial
is Schur stable. Denote the set of such stable vectors by
. In other words
The polynomial
is Schur stableg}. It is well-known that the set
is non-convex for
and open. The closed convex hull of
is a polytope [
6,
7].
Many stabilization problems of discrete-time systems by feedback controller can be reduced to the following: Consider a family
where
,
and
. Find
l-dimensional vector
such that the corresponding polynomial
is Schur stable. In this case, the vector
c is called a stabilizing vector. The polynomial equality (1) can be written in vector-matrix form as follows. Consider column vectors
where
corresponds to
and
correspond to
with the property that added zero component have dimension
n. For instance, assume
and
. Then
,
.
Define
dimensional matrix
. Then relation (1) can be written in vector-matrix form as follows:
The stabilization problem is the determination of a parameter with the property that , namely, find conditions under which , where is an affine subset of .
In [
8,
9] for determination of a stabilizing parameter
the method of random generation of stable vectors and stable segments are suggested. In [
10], for stabilization of continuous-time systems part of specially selected parameters are chosen randomly and another part deterministically. The combination of sum of square and linear matrix inequalities techniques for approximation of the set of stabilizing controllers for continuous time system has been considered in [
11]. For such systems, a linear programming approach is considered in [
12]. Stabilizing controls based on matrix inequalities have been considered in [
13,
14,
15].
In this paper, we consider the problem of existence of an affine controller for discrete-time systems. In
Section 2, we give a simple condition for the existence of a stabilizing parameter
c. In
Section 3, the Euclidean distance between the sets
and
is investigated, from which some existence and nonexistence conditions are obtained.
3. Schur-Szegö Parameters and Polynomial Optimization
Schur-Szegö parameters [
17] or reflection coefficients are widely used in the stability problems of discrete time systems. Let us briefly recall these coefficients. In [
18], for
(
) the reflection map
is defined recursively:
where
,
is
unit matrix and,
is
dimensional, defined by
In the above formula, the first zero is n-dimensional, whereas the last is one-dimensional. The above formula gives
for
,
for
,
and so on. The polynomial
is Schur stable if and only if
for all
. The map
between the reflection vector
and the coefficient vector
is multilinear. By known property of multilinear maps [
1] (p. 435) namely, the convex hull of the image of a multilinear map defined on a box
Q is equal the convex hull of the images of vertices of
Q. In [
6], it has been proven that there is no need to take all vertices of
Q, the convex hull of the image of
f is a polytope, whose vertices correspond to the
polynomials for which zeros are equal to
or 1.
By using Schur-Szegö parameters, we can generate an arbitrary number of Schur stable polynomials: For this purpose it is sufficient to choose any vector and find the image . The obtained vector is stable.
Consider the distance function between the sets and . Recall that is closed affine set whereas is an open set. We show that the distance function between them is n-variable polynomial with total degree . The variables of this polynomial are Schur-Szegö parameters . We consider the minimization of this polynomial over the closed cube and use the Bernstein expansion for the outer approximation of the range.
Consider the number
where
,
A is
matrix with column vectors
,
i.e.,
,
is the Euclidean norm of
x,
f is multilinear reflection map.
Theorem 3. The equalityis satisfied. Proof. Write
where
.
Define
l-dimensional subspace
. Then
is the distance from the point
y to
W. By the well-known theorem of functional analysis [
19], the nearest point
exists and satisfies
, where
means
for all
and the symbol
stands for the scalar product.
Since
, where
, where
, we have
The matrix
is nonsingular. By contradiction, assume that there exists nonzero
such that
. Then
and
. The last equality contradicts to the linear independence of
. Therefore
and
and the equality (6) follows. □
Proposition 4. If then there is no stabilizing parameter c.
If then and either there exists a stabilizing parameter c or there is no stabilizing parameter c, but there exists a parameter c such that is marginally stable, i.e., has all roots in the closure of the open unit disc. It should be noted that the last case is rather a pathological than a typical one.
The function
is a multivariable polynomial defined on the box
. The range
can be estimated by the Bernstein expansion. Let us briefly describe this expansion for
n-variate polynomials [
20].
An
n-variate polynomial
is defined as
where
,
,
and
The
Lth Bernstein polynomial of degree
d is defined by
where
. The transformation of a polynomial from its power from (7) into its Bernstein form result in
where the Bernstein coefficients
of
v over the
n-dimensional unit box
are given by
Here is defined as .
Theorem 5. [20] The following inequalitiesare satisfied. Theorem 5 gives outer approximation of the range of over the unit box U.
In order to obtain the Bernstein coefficients and bounds over an arbitrary box D rather the unit box U, the box D should be affinely mapped onto U. To obtain convergent bounds for the range of the polynomial (7) over the box U, the box U should be divided into small boxes.
If () then the polynomial is positive (negative) on U. If , then by the bisection in the chosen coordinate direction, the box U is divided into two boxes. A new box on which the inequality or is satisfied should be eliminated, since our polynomial has constant sign on this box. Otherwise, the box should be divided into two new boxes.
If at some step of the Bernstein expansion the lower bound is positive then and and there is no stabilizing c. If this is not the case, an additional investigation on existence is required.
Taking into account the definition of α and Proposition 4, we can suggest the following algorithm for a stabilizing vector.
Algorithm 6. - (1)
Given family (1), explicitly calculate the multivariable polynomial .
- (2)
Calculate step-by-step the Bernstein coefficients for the function over the box . If at some step, the minimal Bernstein coefficient is positive then stop, there is no stabilizing parameter c.
- (3)
If after a sufficiently large number of steps the lower Bernstein coefficient remains negative, then stop and carry out an additional test for the existence of a stabilizing vector c. A cycling of the calculation indicates the existence of a stabilizing parameter. In this case, we can proceed to a random search if number of remaining boxes is small. For example, choose the center point of a remaining box, calculate and test for a stabilizing vector, i.e., test Schur stability of . Alternatively, the gradient minimization method of the smooth function could be applied.
Example 3. Consider stabilizing problem for the following polynomial family:
The matrix
A (see (2)) and the vector
are
and we have
When Algorithm 6 is applied, 477 subboxes remained at the end of 1000 steps after 48 seconds. Consider one of these subboxes:
The center of this subbox is
and the corresponding
can be calculated as
The corresponding polynomial is Schur stable, i.e., is a stabilizing vector.
Example 4 (There is no stabilizing
c) Consider the family
Here , and . The polynomial is 5-variate quadratic polynomial. We apply the Bernstein expansion, splitting-elimination procedure and after 698 steps (during second) conclude that on . Therefore, there is no stabilizing parameter c.
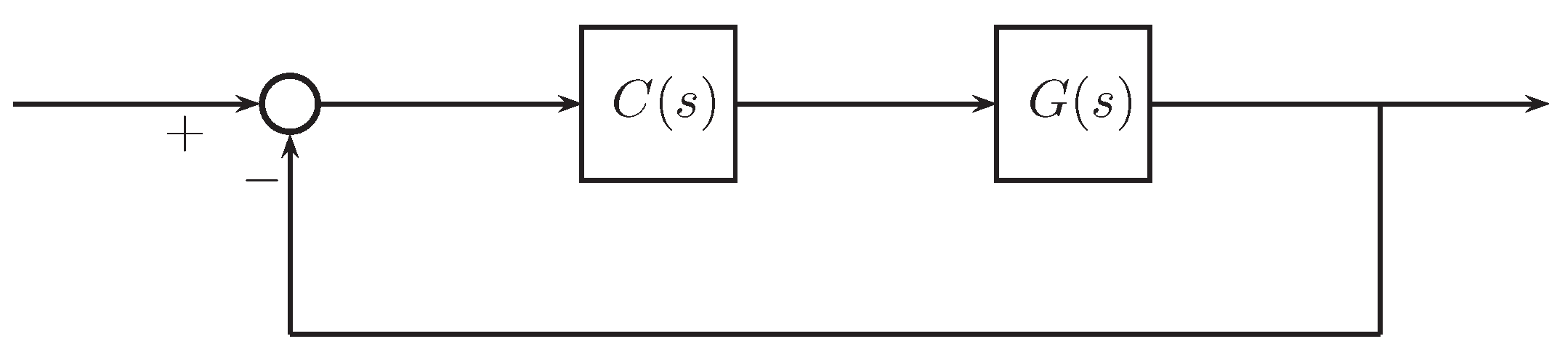
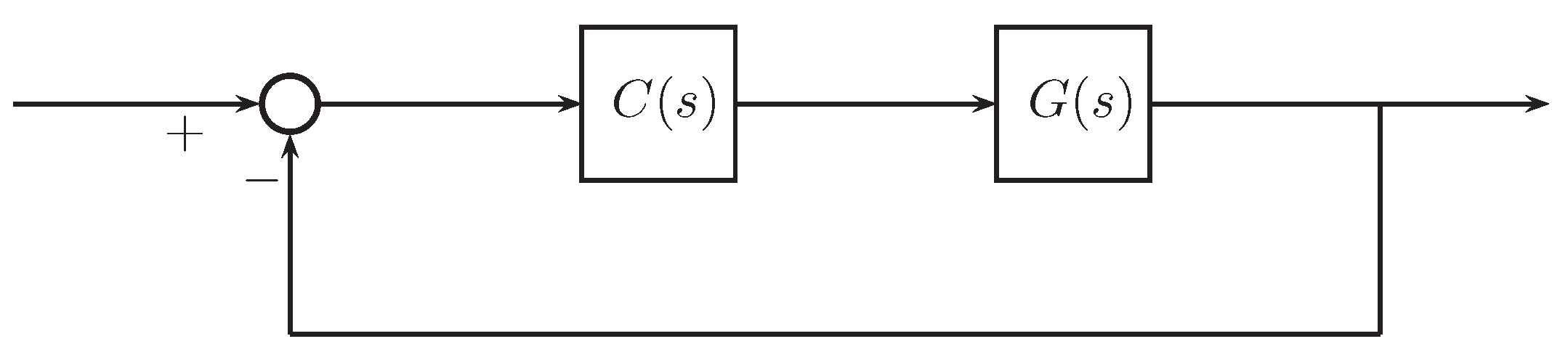
Example 5. Let the control system shown in the
Figure 1 be given. Assume that transfer function and controller are
The characteristic polynomial of the closed-loop system becomes
Let . We apply Algorithm 6, part 2 and after 3726 steps conclude that there is no stabilizing parameter c.
Let
. In this case, Algorithm 6 applied to the problem of stabilization does not give a negative result after 20000 steps with 6538 subboxes, and
is one of them. The center of this subbox is
and calculations give
. Since the polynomial
is Schur stable,
is a stabilizing vector.
Remark 1. Here, we indicate advantages and disadvantages of our results given in this paper. Firstly, note that Proposition 1 has a simple form. On the other hand the results existing in the literature on the existence and evaluation of Schur stable element in an affine polynomial family are mainly random search methods (see [
9] and references therein). Algorithm 6 gives an answer when there does not exist a stabilizing parameter; however, it gives a useful hint as to whether such a parameter exists. The main setback of Algorithm 6 is that high-dimensional systems require long calculations.



{kind=link}