
Optimization of a Multi-Energy Complementary Distributed Energy System Based on Comparisons of Two Genetic Optimization Algorithms

Abstract
:1. Introduction
2. Optimization Modeling and Methods
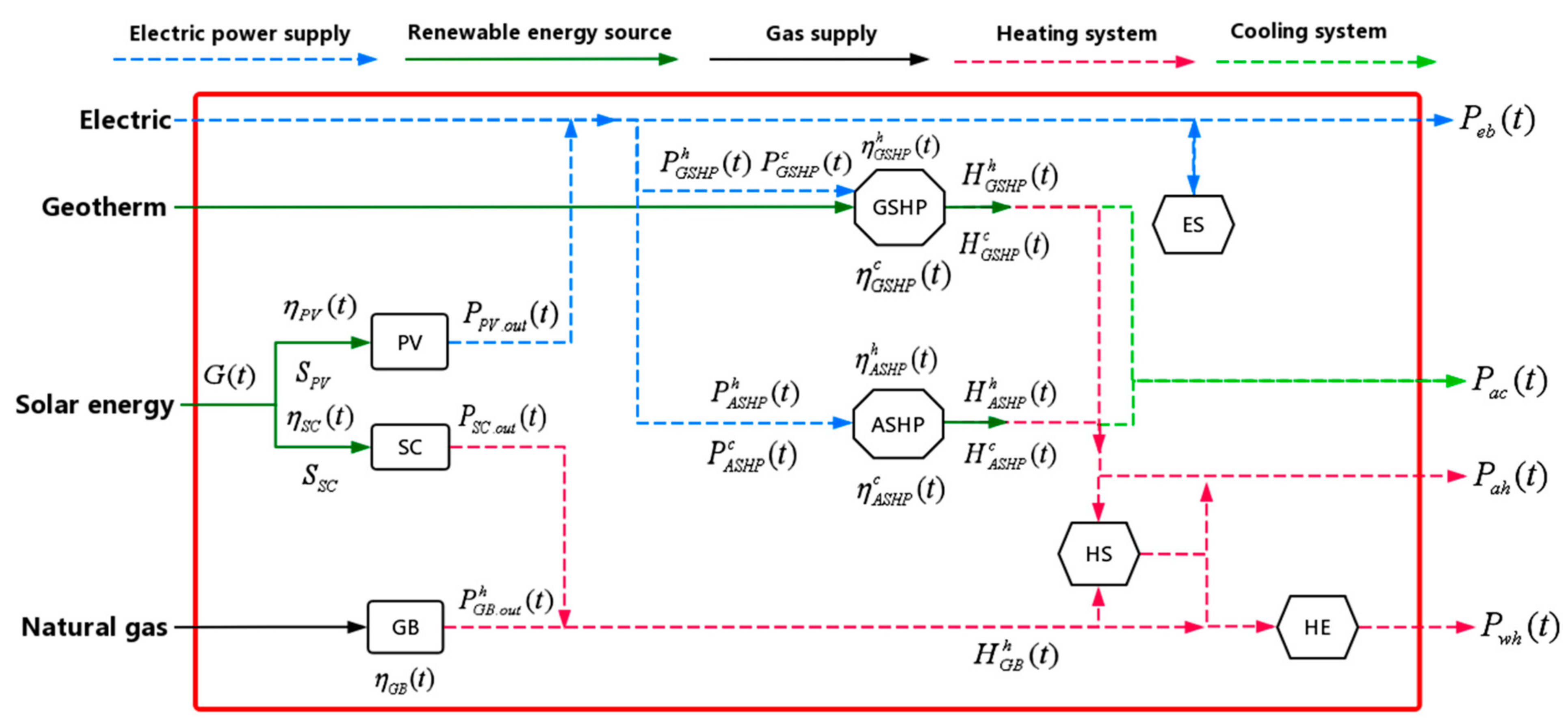
2.1. Mathematical Modeling
2.2. Optimization Objectives and Constraints
2.2.1. Optimization Objectives
2.2.2. Constraint Conditions
2.3. Description of the Optimization Methods
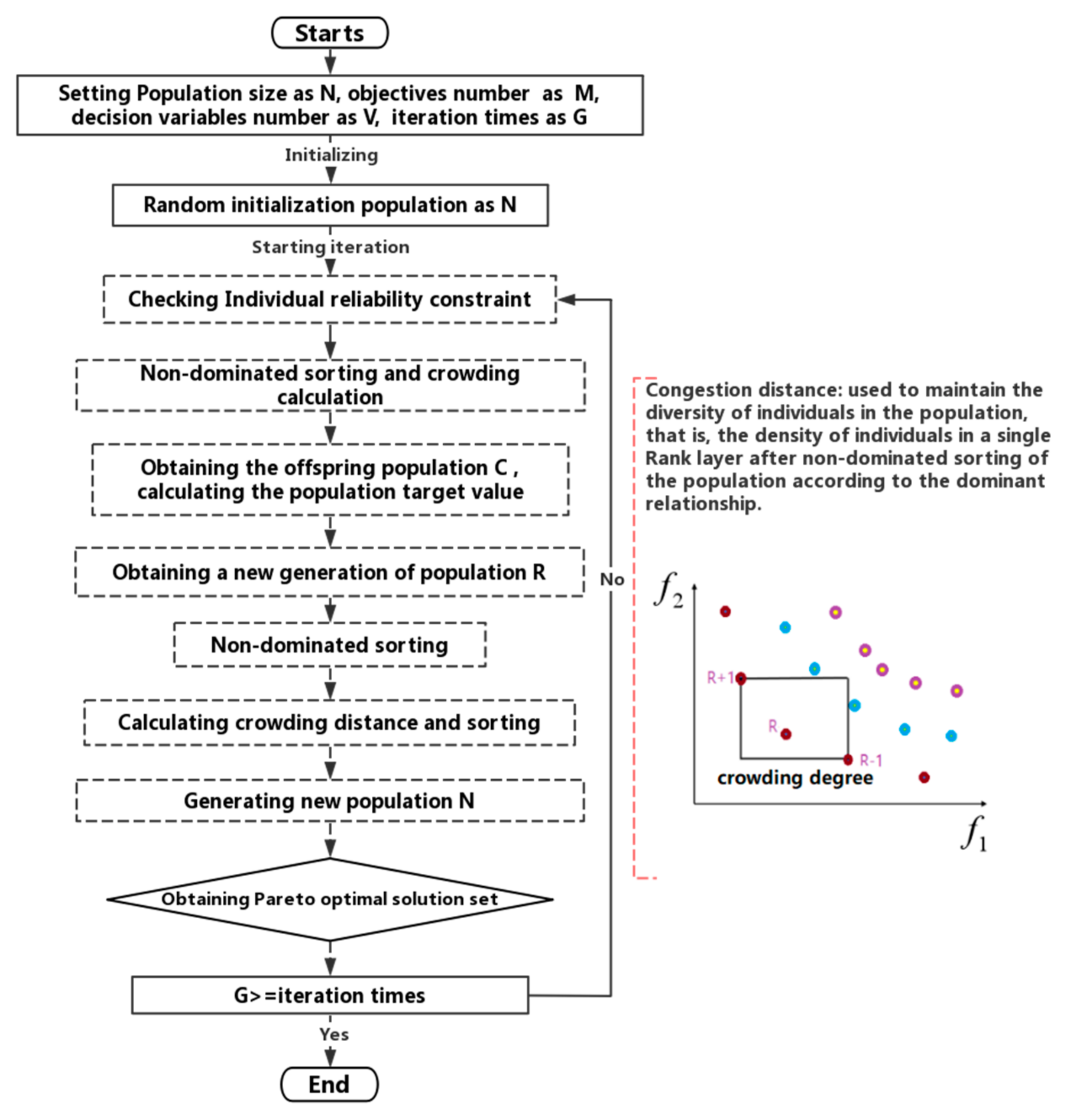
2.3.1. NSGA-II
2.3.2. NSGA-III
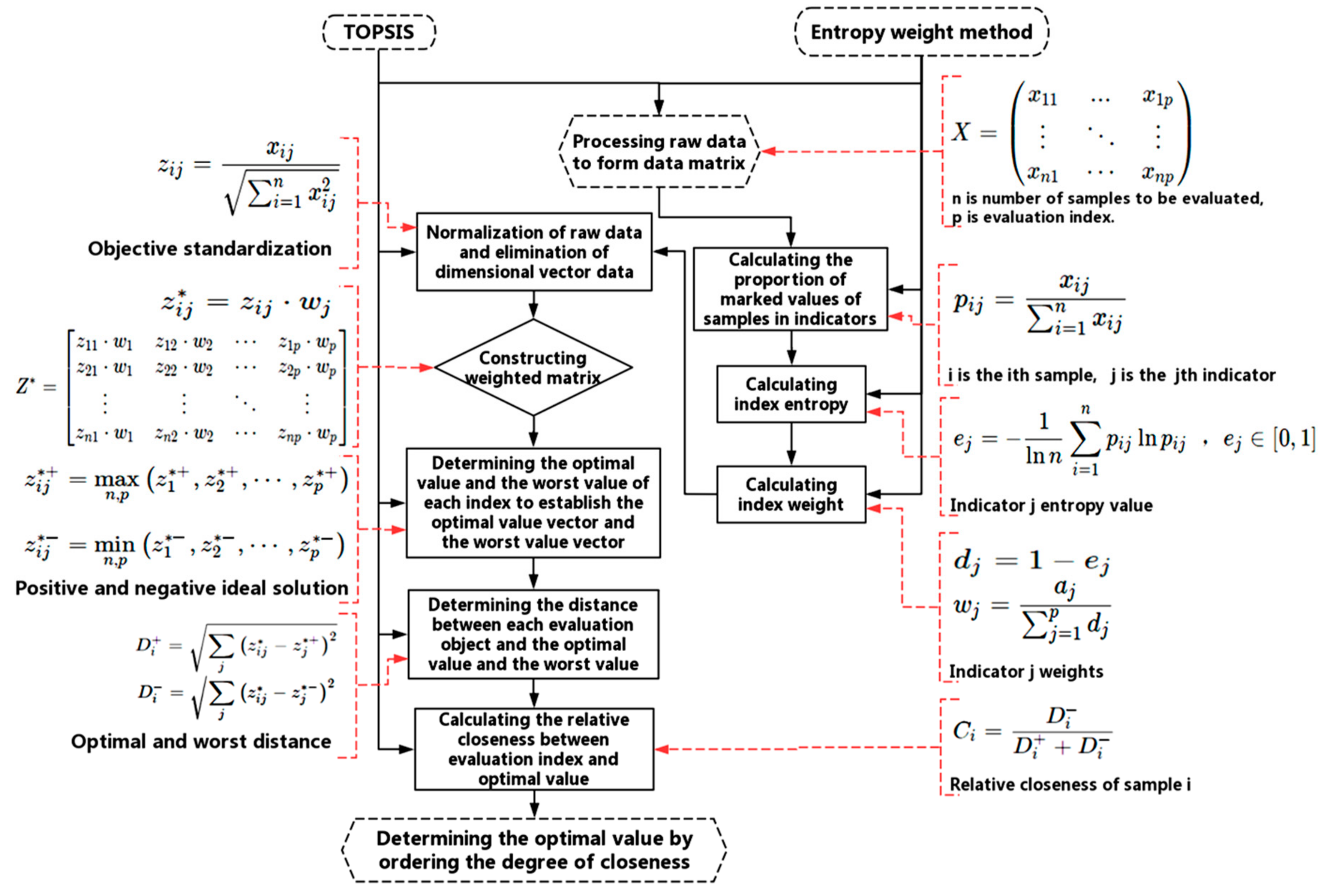
2.3.3. Comprehensive Evaluation of TOPSIS and Entropy Weight
2.3.4. Quality Evaluation Method of Optimization Solution
2.3.5. Objective Normalization
3. Optimization Example
3.1. Project Profile
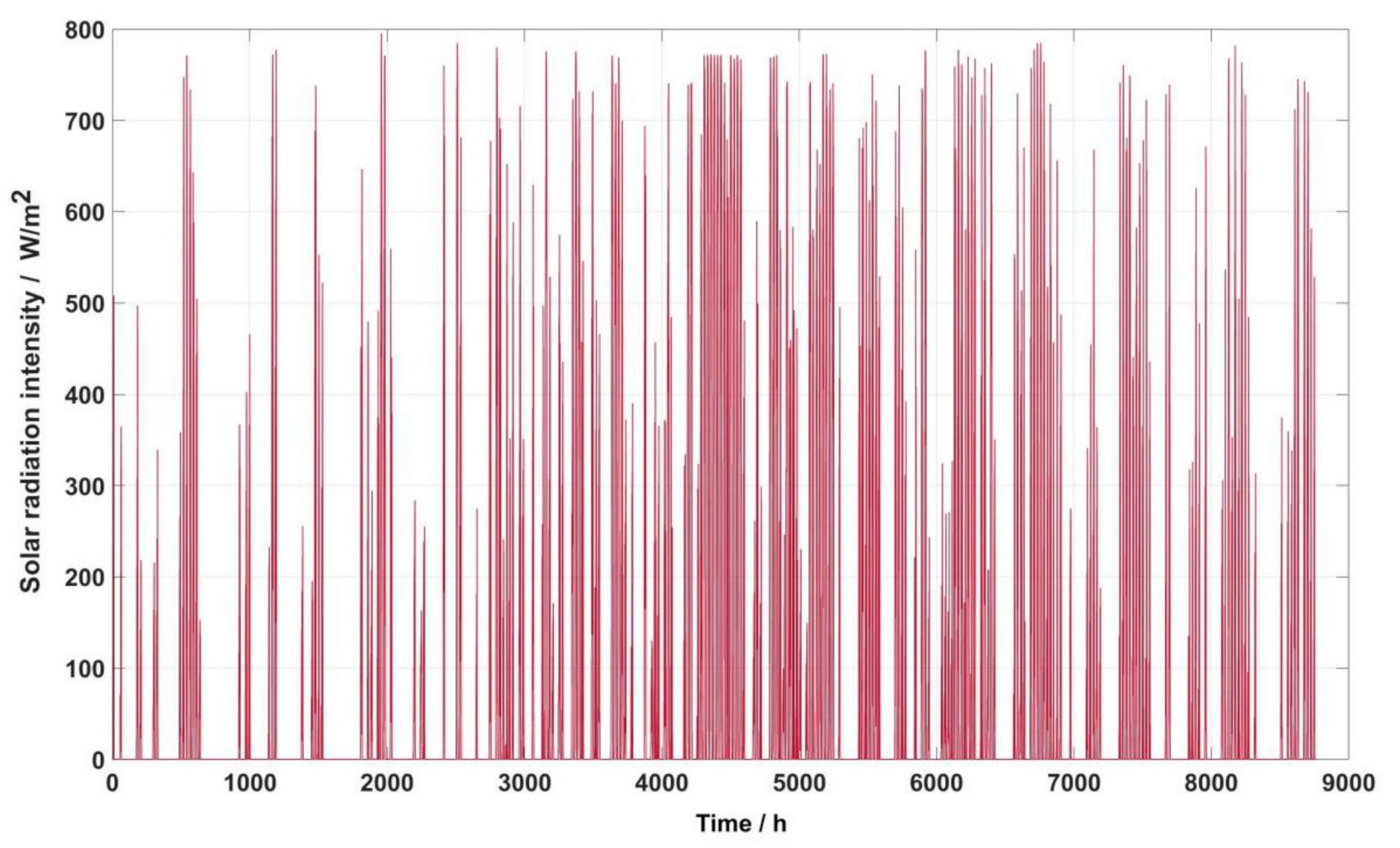
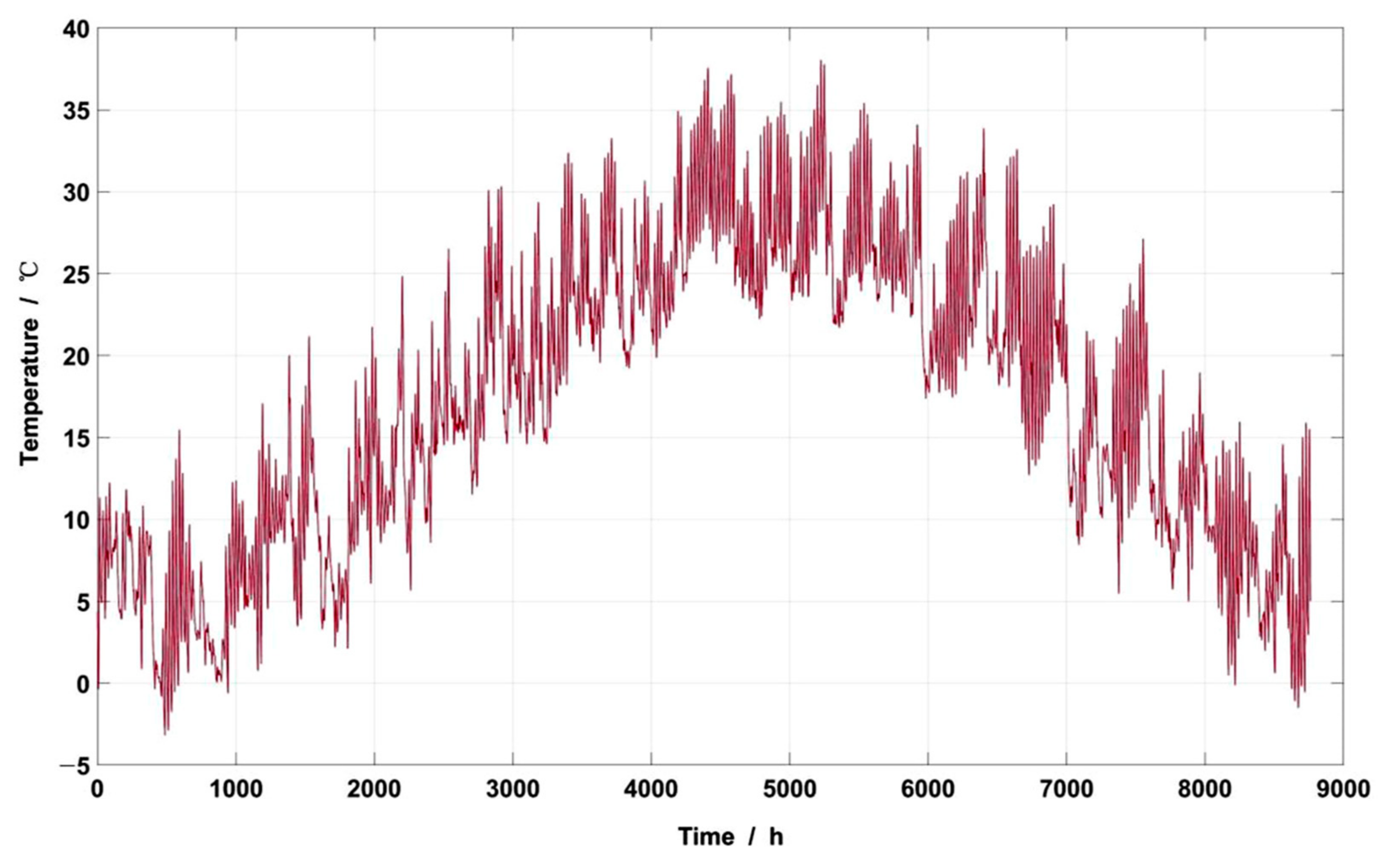
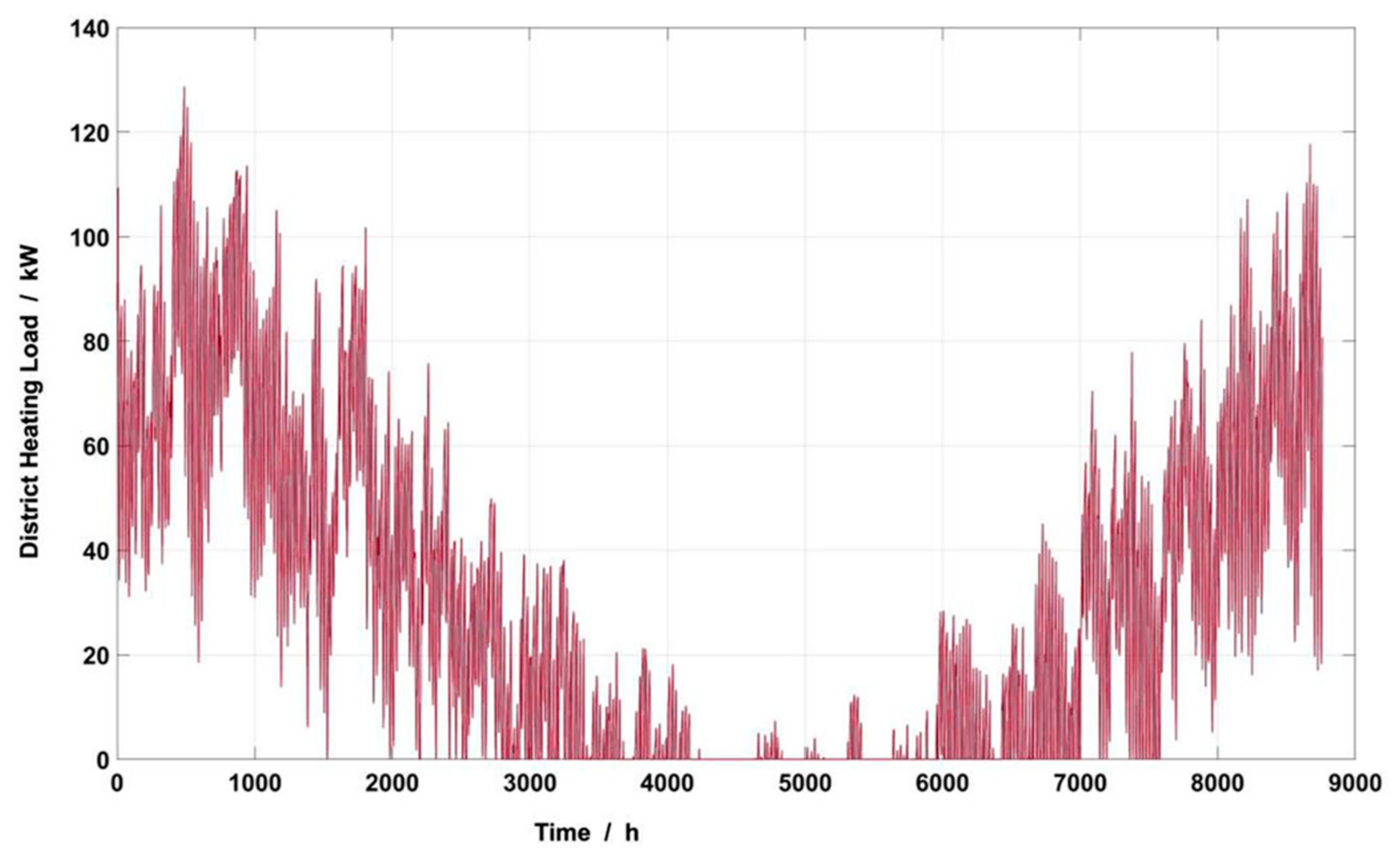
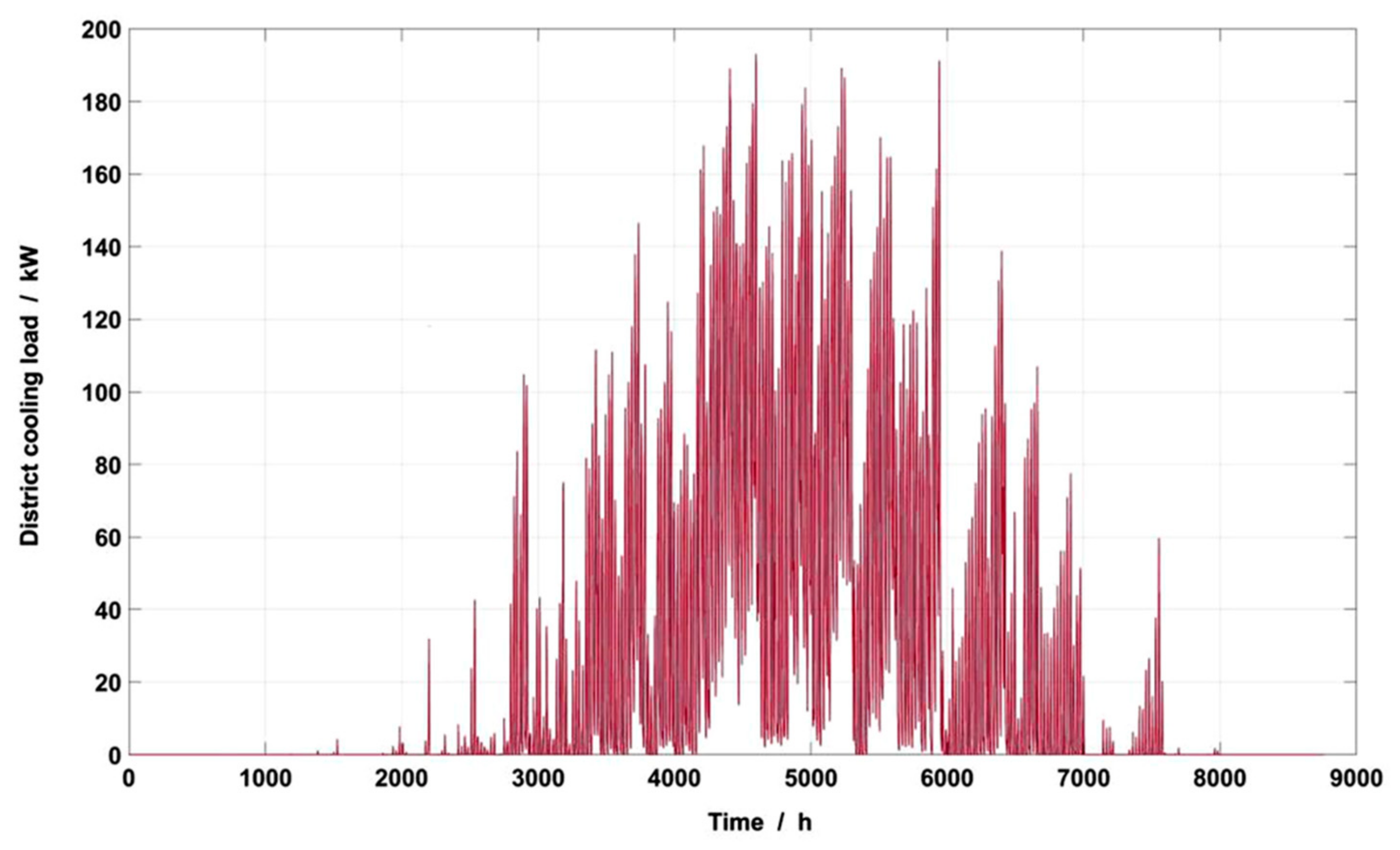
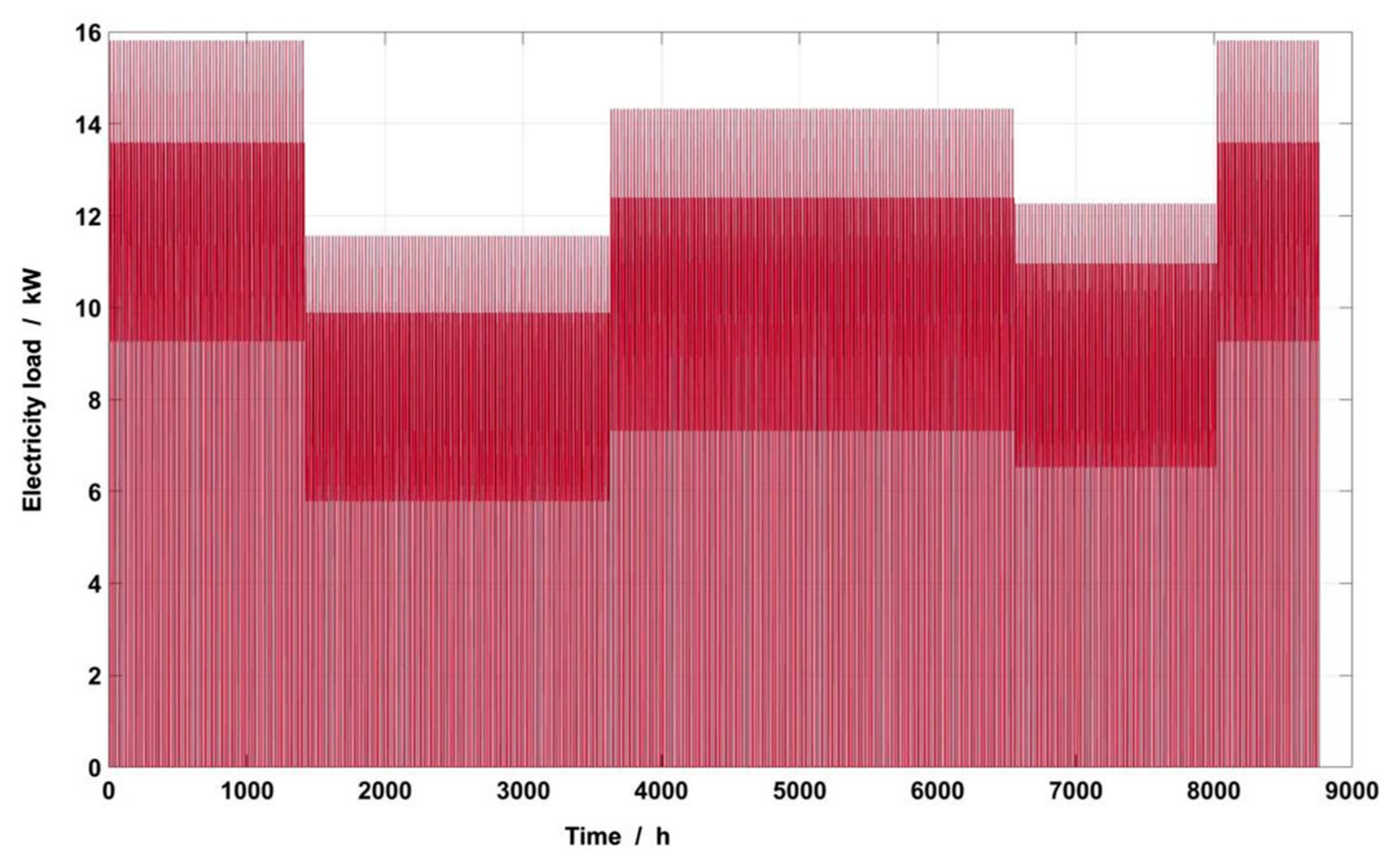
3.2. Meteorological Parameters and Load Demand
3.3. Example Computation Parameter
3.4. Optimization Parameter Setting
3.4.1. Population Number
3.4.2. Other Parameters
4. Results and Discussions
4.1. Optimization Results of NSGA-II
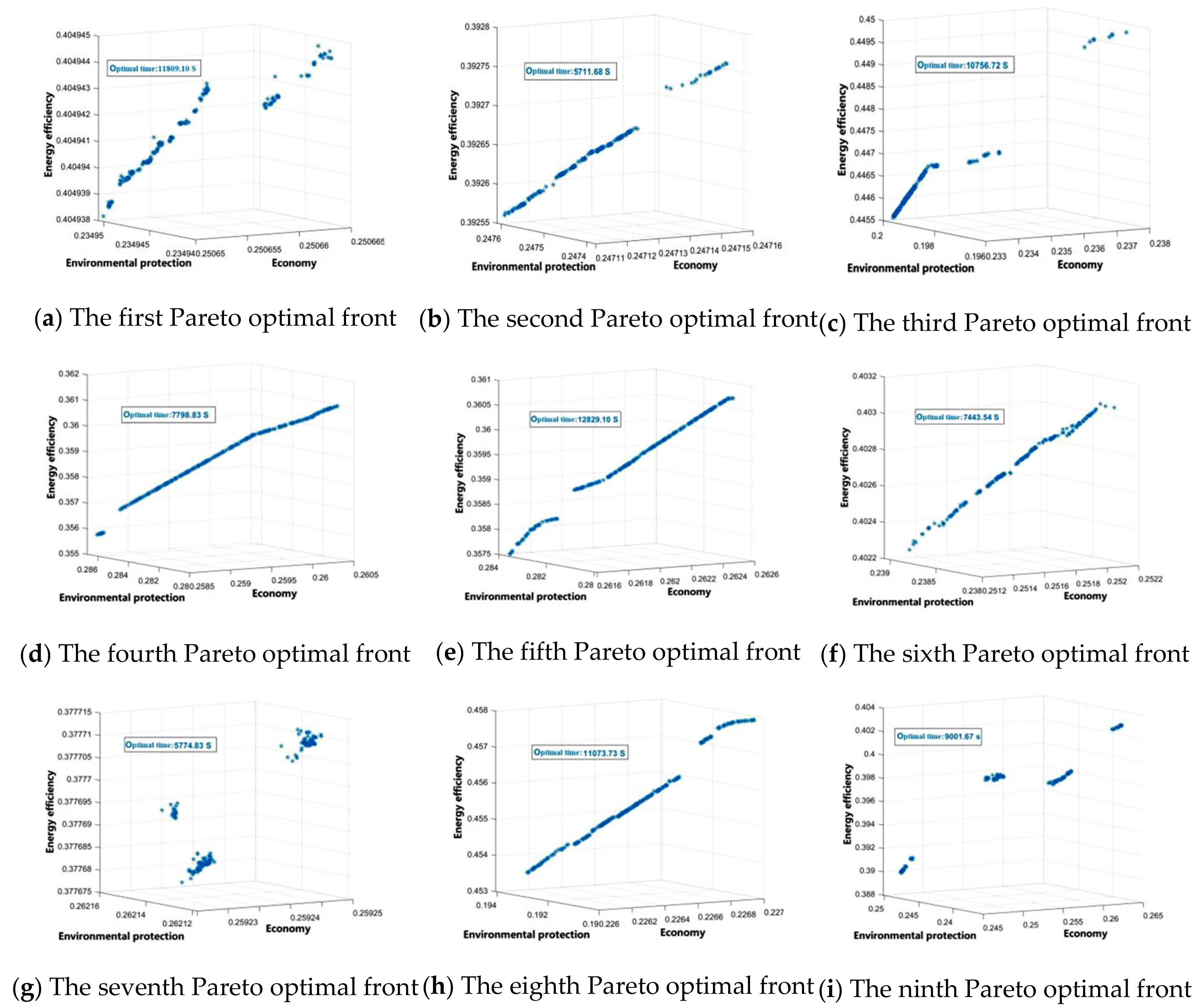
4.1.1. Pareto Optimal Front
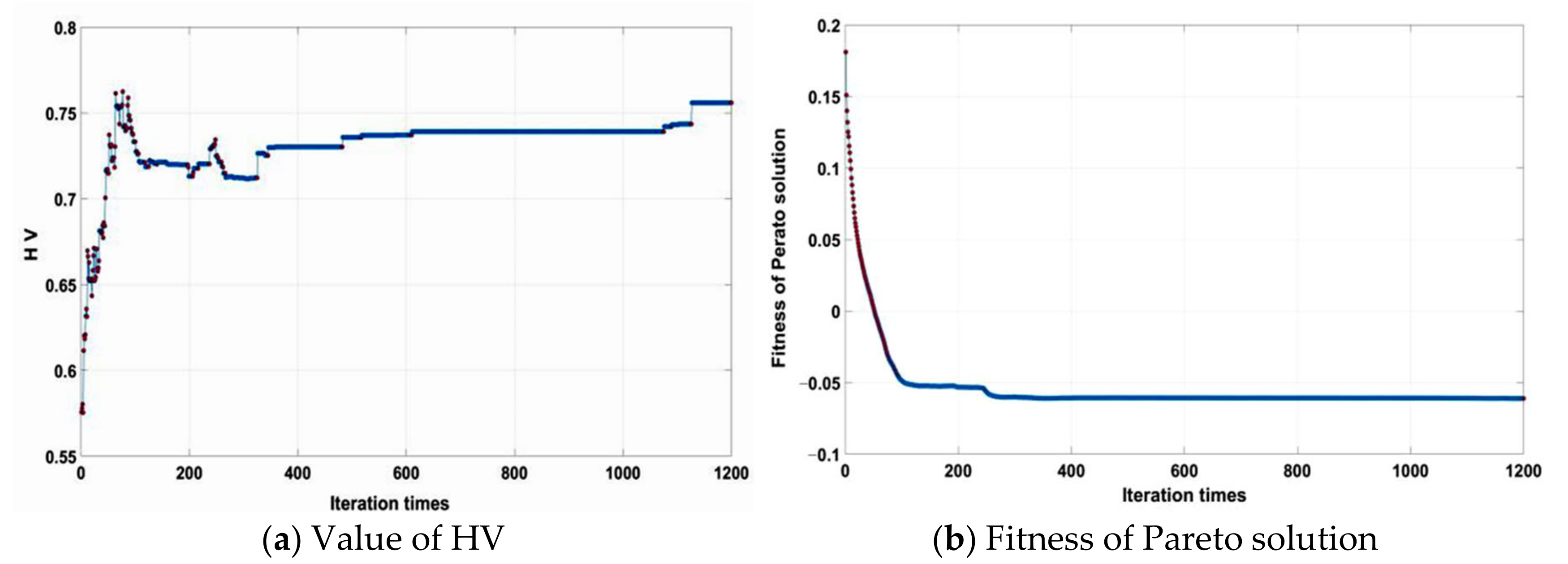
4.1.2. Quality Evaluation of Pareto Solutions
4.1.3. Objective Weight Analysis
4.1.4. Pareto Optimal Solutions
4.2. Optimization Results of NSGA-III
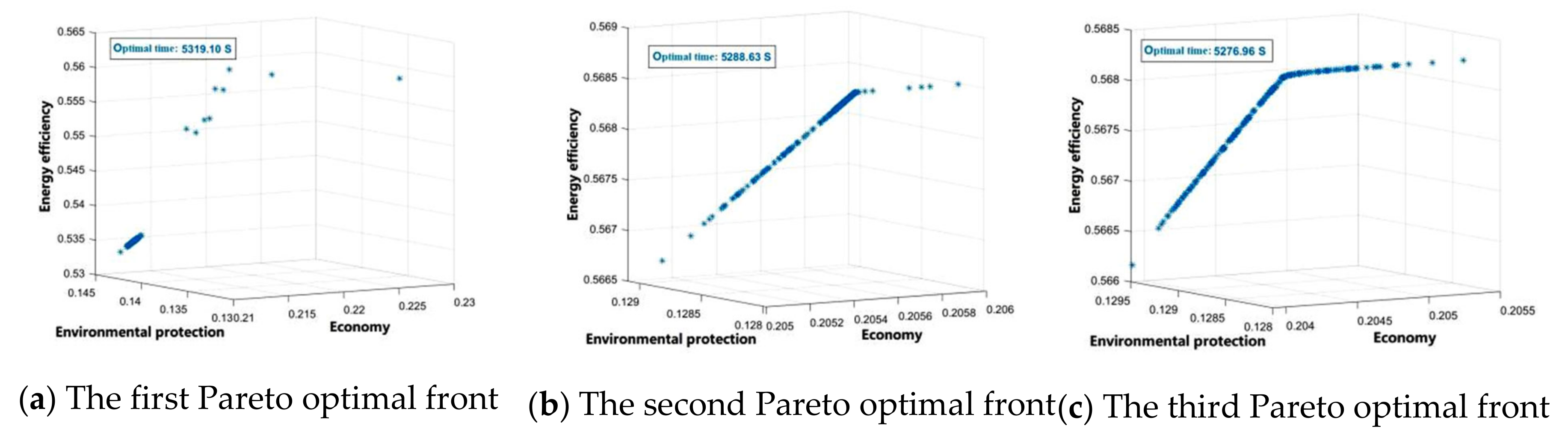
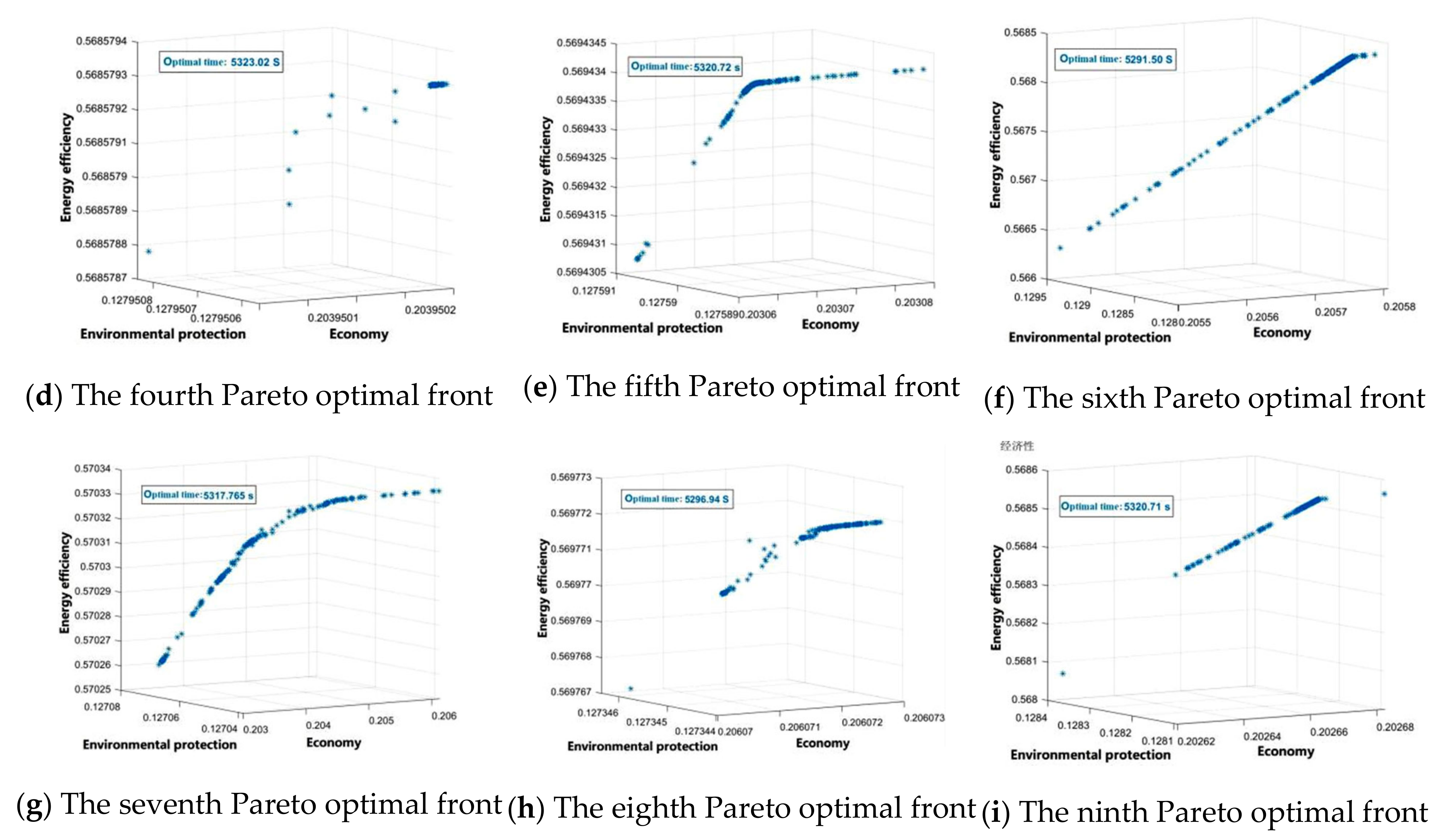
4.2.1. Pareto Optimal Front
4.2.2. Quality Evaluation of Pareto Solutions
4.2.3. Objective Weight Analysis
4.2.4. Pareto Optimal Solutions
4.3. Comparison of Results and Final Optimization Decision
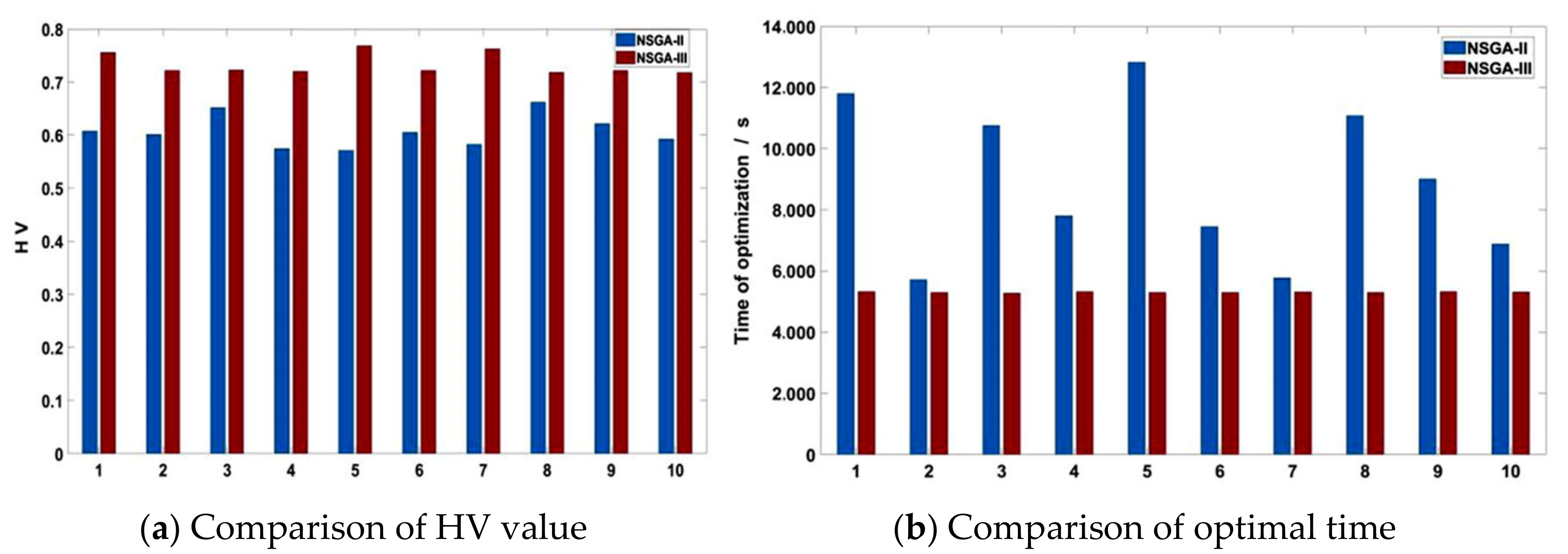
4.3.1. Comparison of Algorithm Performance
4.3.2. Final Decision
4.4. Typical Daily Load Scheduling Strategies in the Example
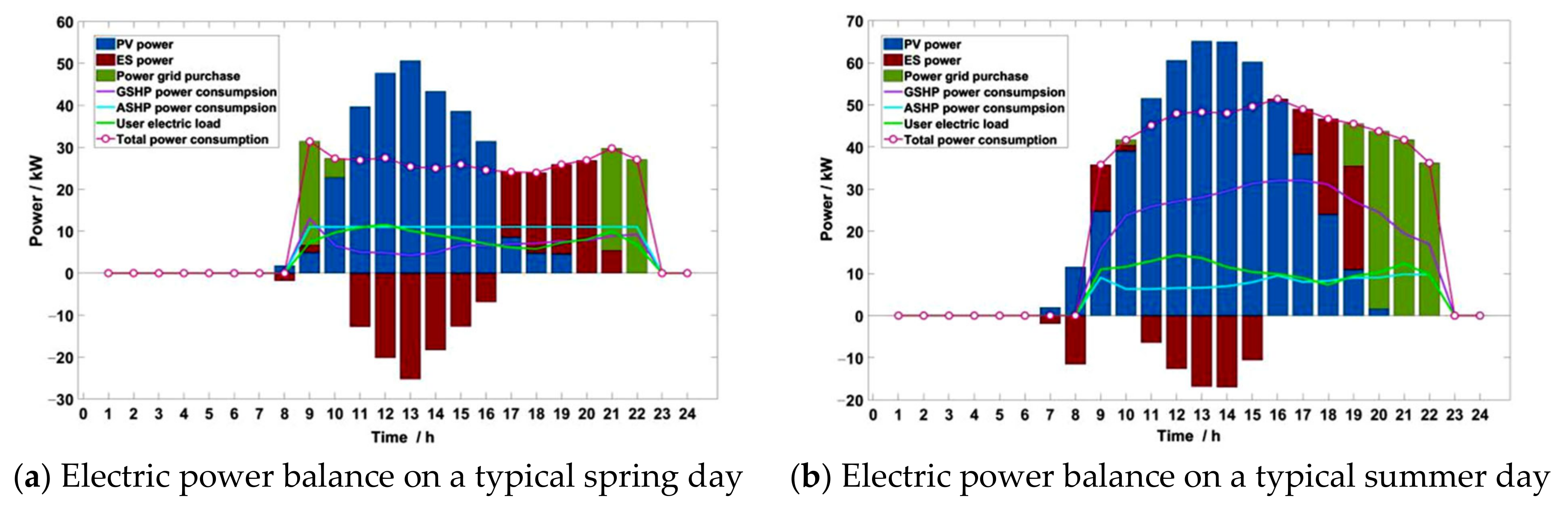
4.4.1. Electric Power Balance
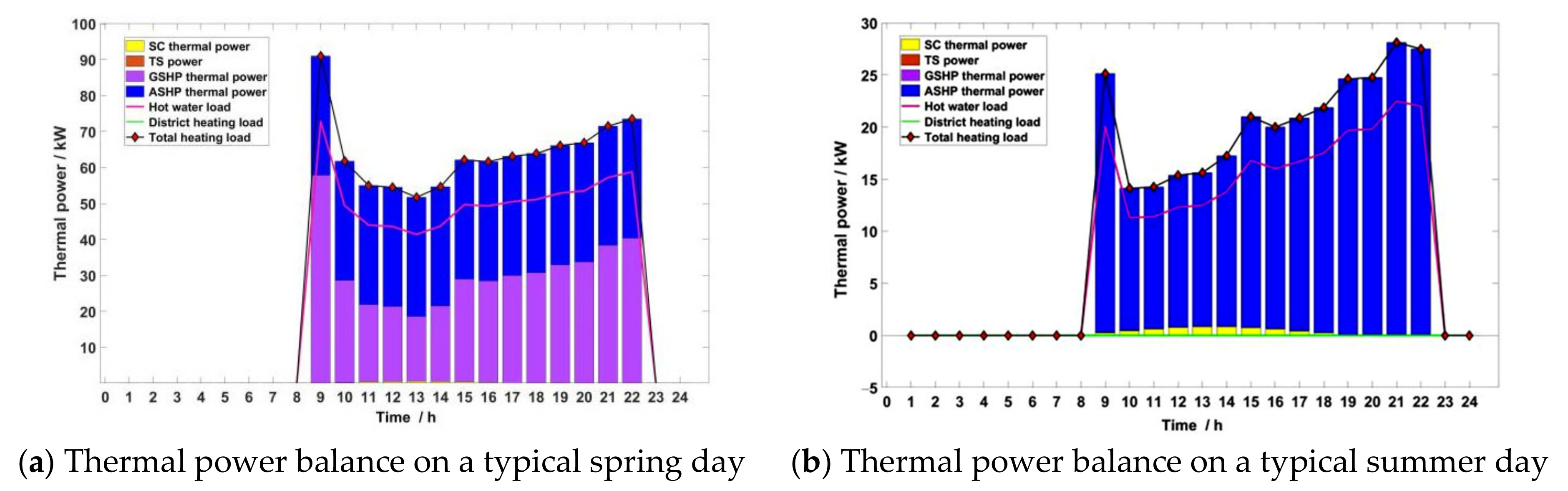
4.4.2. Thermal Power Balance
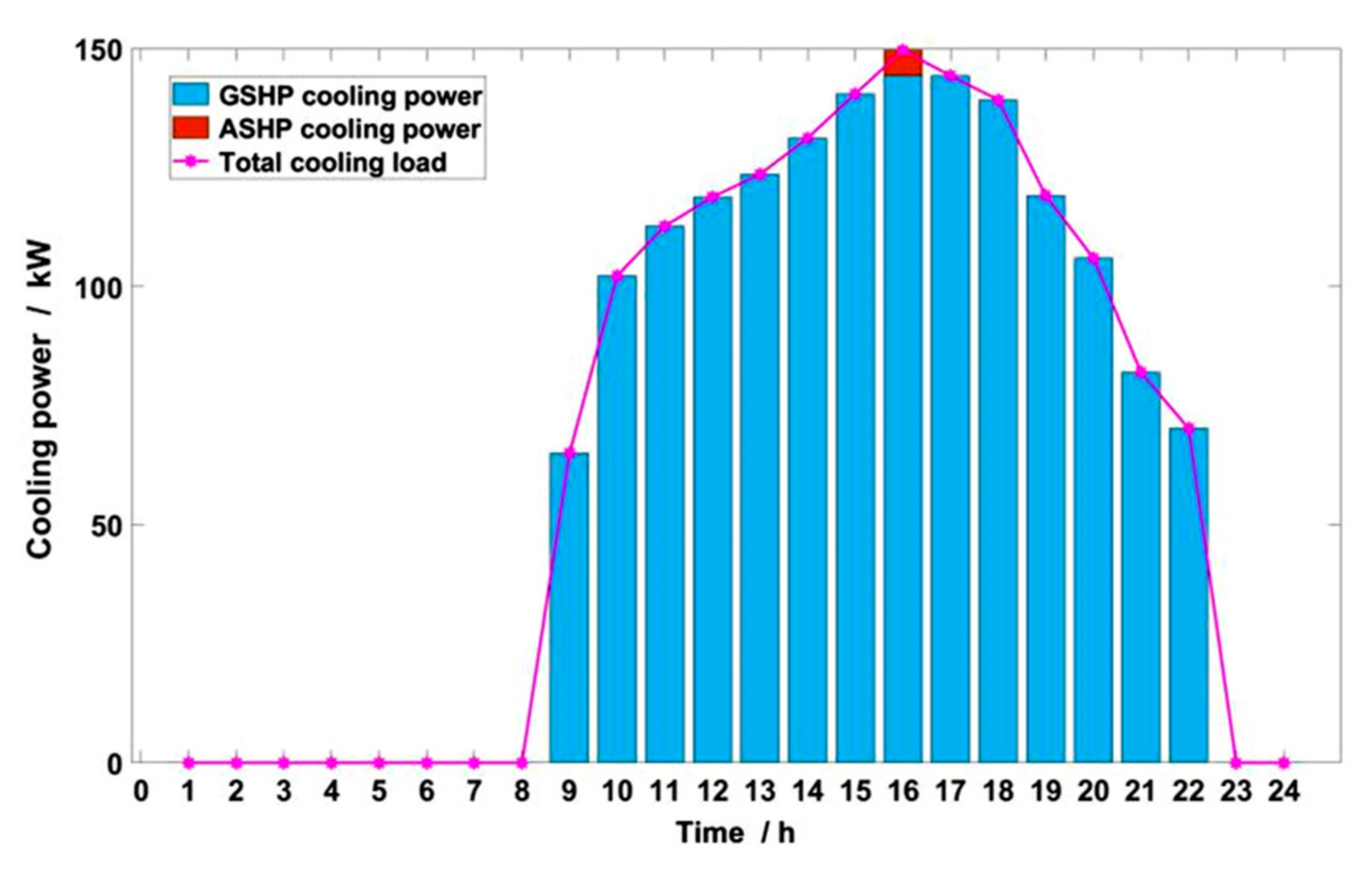
4.4.3. Cooling Power Balance
4.5. Final Decision Scheme of the Example
5. Conclusions
5.1. Research Conclusions
5.2. Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Emara, D.; Ezzat, M.; Abdelaziz, A.Y.; Mahmoud, K.; Lehtonen, M.; Darwish, M.M. Novel Control Strategy for Enhancing Microgrid Operation Connected to Photovoltaic Generation and Energy Storage Systems. Electronics 2021, 10, 1261. [Google Scholar] [CrossRef]
- Ali, M.N.; Mahmoud, K.; Lehtonen, M.; Darwish, M.M. An Efficient Fuzzy-Logic Based Variable-Step Incremental Conductance MPPT Method for Grid-connected PV Systems. IEEE Access 2021, 9, 26420–26430. [Google Scholar] [CrossRef]
- Ali, E.S.; El-Sehiemy, R.A.; El-Ela, A.; Adel, A.; Mahmoud, K.; Lehtonen, M.; Darwish, M.M. An Effective Bi-Stage Method for Renewable Energy Sources Integration into Unbalanced Distribution Systems Considering Uncertainty. Processes 2021, 9, 471. [Google Scholar] [CrossRef]
- Kang, C.; Chen, Q.; Xia, Q. Prospects of Low-Carbon Electricity. Power Syst. Technol. 2009, 33, 1–7. [Google Scholar]
- Zhu, Q.; Luo, X.; Zhang, B.; Chen, Y. Mathematical modellingm and optimization of alarge-scale combined cooling, heat and power system that incorporates unit changeover and time-ofuse electricity price. Energy Convers. Manag. 2017, 133, 385–398. [Google Scholar] [CrossRef]
- Sanaye, S.; Khakpaay, N. Simultaneous use of MRM (maximum rectangle method) and optimization methods in determining nominal capacity of gas engines in CCHP(combined cooling, heating and power) systems. Energy 2014, 72, 145–158. [Google Scholar] [CrossRef]
- Chen, L.; Jia, M.; Huang, Q.; Yuan, X. Modeling and Simulation Analysis of Hybrid AC/DC Distribution Network Based on Flexible DC Interconnection. Power Syst. Technol. 2018, 42, 1410–1416. [Google Scholar] [CrossRef]
- Lotfi, H.; Khodaei, A. AC versus DC microgrid planning. IEEE Trans. Smart Grid 2017, 8, 296–304. [Google Scholar] [CrossRef]
- Guo, Y.; Wu, F.; Xu, Q. Optimal capacity allocation strategy for Wind-PV-ES system with different operation modes and its economic analysis considering network loss subsidy. Smart Power 2019, 47, 26–33. [Google Scholar]
- Qiu, J.; Zhao, J.; Zheng, Y.; Dong, Z.; Dong, Z.Y. Optimal allocation of BESS and MT in a microgrid. IET Gener. Transm. Distrib. 2018, 12, 1988–1997. [Google Scholar] [CrossRef]
- Chen, C.; Duan, S. Optimal allocation of distributed generation and energy storage system in microgrids. IET Renew. Power Gener. 2014, 8, 581–589. [Google Scholar] [CrossRef] [Green Version]
- Hou, J.C.; Hu, Q.F.; Tan, Z.F. Multi-objective optimization model of collaborative WP-EV dispatch considering demand response. Electr. Power Autom. Equip. 2016, 36, 22–27. [Google Scholar] [CrossRef]
- Jing, Y.; Bai, H.; Zhang, J. Multi-objective optimization design and operation strategy analysis of a solar combined cooling heating and power system. Proc. CSEE 2012, 32, 82–87. [Google Scholar] [CrossRef]
- Mehleri, E.D.; Sarimveis, H.; Markatos, N.C.; Papageorgiou, L.G. A mathematical programming approach for optimal design of distributed energy systems at the neighborhood level. Energy 2012, 44, 96–104. [Google Scholar] [CrossRef]
- Huang, W.; Zhang, N.; Dong, R.; Liu, Y.; Kang, C. Coordinated Planning of Multiple Enerd Energy Hubs. Proc. CSEE 2018, 38, 5425–5437. [Google Scholar] [CrossRef]
- Bahramirad, S.; Reder, W.; Khodaei, A. Reliability-constrained optimal sizing of energy storage system in a micro grid. IEEE Trans. Smart Grid 2012, 3, 2056–2062. [Google Scholar] [CrossRef]
- Jayasekara, S.; Halgamuge, S.K.; Attalage, R.A.; Rajarathne, R. Optimum sizing and tracking of combined cooling heating and power systems for bulk energy consumers. Appl. Energy 2014, 118, 124–134. [Google Scholar] [CrossRef]
- Salimi, M.; Ghasemi, H.; Adelpour, M.; Vaez-ZAdeh, S. Optimal planning of energy hubs in interconnected energy systems: A case study for natural gas and electricity. IET Gener. Transm. Distrib. 2015, 9, 695–707. [Google Scholar] [CrossRef] [Green Version]
- Lin, S.; Liu, C.; Li, D.; Fu, Y. Bi-level Multiple Scenarios Collaborative Optimization Configuration of CCHP Regional Multi-microgrid System Considering Power Interaction among Microgrids. Proc. CSEE 2020, 40, 1409–1421. [Google Scholar] [CrossRef]
- Pelet, X.; Favrat, D.; Leyland, G. Multiobjective optimisation of integrated energy systems for remote communities considering economics and CO2 emissions. Int. J. Therm. Sci. 2005, 44, 1180–1189. [Google Scholar] [CrossRef]
- Chang, J. Discussion on the key technology of multi-energy complementary, integrated and optimized energy system. Energy Conserv. 2019, 38, 111–112. [Google Scholar]
- Deb, K.; Srinivas, N. Multi-objective optimization usingnon-dominated sorting in genetic algorithms. Evol. Comput. 1995, 3, 221–248. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T.A.M.T. A fast and elitist multi-objective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Deb, K.; Jain, H. An evolutionary many-objective optimization algorithm using reference-point-based non-dominated sorting approach, part I: Solving problems with box constraints. IEEE Trans. Evol. Comput. 2014, 18, 577–601. [Google Scholar] [CrossRef]
- Vikram, K.; Ragavendran, U.; Kalita, K.; Ghadai, R.K.; Gao, X.Z. Hybrid Metamodel-NSGA-III-EDAS Based Optimal Design of Thin Film Coatings. Comput. Mater. Contin. 2021, 66, 1771–1784. [Google Scholar] [CrossRef]
- Tavana, M.; Li, Z.; Mobin, M.; Komaki, M.; Teymourian, E. Ehsan Teymourian. Multi-objective control chart design optimization using NSGA-III and MOPSO enhanced with DEA and TOPSIS. Expert Syst. Appl. 2016, 50, 17–39. [Google Scholar] [CrossRef]
- Jain, H.; Deb, K. An Evolutionary Many-Objective Optimization Algorithm Using Reference-Point Based Nondominated Sorting Approach, Part II: Handling Constraints and Extending to an Adaptive Approach. IEEE Trans. Evol. Comput. 2014, 18, 602–622. [Google Scholar] [CrossRef]
- Hisao, I.; Ryo, I.; Yu, S.; Yusuke, N. Performance comparison of NSGA-II and NSGA-III on various many-objective test problems. In Proceedings of the IEEE Congress on Evolutionary Computation (CEC), Vancouver, BC, Canada, 24–29 July 2016; Volume 6, pp. 3045–3052. [Google Scholar] [CrossRef]
- Ciro, G.C.; Dugardin, F.; Yalaoui, F.; Kelly, R. A NSGA-II and NSGA-III comparison for solving an open shop scheduling problem with resource constraints. IFAC-PapersOnLine 2016, 49, 1272–1277. [Google Scholar] [CrossRef]
- Yannibelli, V.; Pacini, E.; Monge, D.; Mateos, C.; Rodriguez, G. A Comparative Analysis of NSGA-II and NSGA-III for Autoscaling Parameter Sweep Experiments in the Cloud. Sci. Program. 2020, 2020, 4653204. [Google Scholar] [CrossRef]
- Kuo, M.; Lu, S.; Tsou, M. Considering carbon emissions in economic dispatch planning for isolated power systems: Acase study of the Tai wan power system. IEEE Trans. Ind. Appl. 2018, 54, 987–997. [Google Scholar] [CrossRef]
- Wang, J.; Lu, Y.; Yang, Y.; Mao, T. Thermodynamic performance analysis and optimization of a solar-assisted combined cooling, heating and power system. Energy 2016, 115, 49–59. [Google Scholar] [CrossRef]
- Madonna, F.; Bazzocchi, F. Annual performances of reversible air-to-water heat pumps in small residential buildings. Energy Build. 2013, 65, 299–309. [Google Scholar] [CrossRef]
- Wang, J.; Sui, J.; Jin, H. An improved operation strategy of combined cooling heating and power system following electrical load. Energy 2015, 85, 654–666. [Google Scholar] [CrossRef]
- Li, H.; Kang, S.; Yu, Z.; Cai, B.; Zhang, G. A feasible system integrating combined heating and power system with ground-source heat pump. Energy 2014, 74, 240–247. [Google Scholar] [CrossRef]
- Al-Gabalawy, M.; Mahmoud, K.; Darwish, M.M.; Dawson, J.A.; Lehtonen, M.; Hosny, N.S. Reliable and Robust Observer for Simultaneously Estimating State-of-Charge and State-of-Health of LiFePO4 Batteries. Appl. Sci. 2021, 11, 3609. [Google Scholar] [CrossRef]
- Zhu, Q. Capacity Optimization for Electrical and Thermal Energy Storage in Multi-Energy Building Energy System. Ph.D. Thesis, Shandong University, Jinan, China, 2018. [Google Scholar]
- Ren, N.; Wang, Y.; Xu, Z.; Hua, X.; Ding, T.; Bie, Z.; Zhang, X. Component Sizing and Optimal Scheduling for Distributed Multi-Energy System. Power Syst. Technol. 2018, 42, 3504–3512. [Google Scholar] [CrossRef]
- Wang, L.; Zeng, S.; Huang, X.; He, J. Superstructure Model and Optimization Design of Operation Strategy for Distributed Energy System with Multiple Complementary Energy. J. Eng. Rmal Energy Power 2020, 35, 9–17. [Google Scholar] [CrossRef]
- Eldhuizen, D.A.V.V.; Lamont, G.B. Multiobjective Evolutionary Algorithm Research: A History and Analysis; Technical Report TR-98-03; Department of Electrical and Computer Engineering, Air Force Institute of Technology: Dayton, OH, USA, 1998; Volume 10. [Google Scholar] [CrossRef]
- Zhou, A.; Jin, Y.; Zhang, Q.; Sendhoff, B.; Tsang, E. Combining model-based and genetics-based offspring generation for multi-objective optimization using a convergence criterion. In Proceedings of the 2006 IEEE Congress on Evolutionary Computation, Vancouver, BC, Canada, 16–21 July 2006; pp. 892–899. [Google Scholar]
- While, L.; Hingston, P.; Barone, L.; Huband, S. A faster algorithm for calculating hypervolume. IEEE Trans. Evol. Comput. 2006, 10, 29–38. [Google Scholar] [CrossRef] [Green Version]
- Zitzler, E. Evolutionary Algorithms for Multiobjective Optimization: Methods and Applications. Ph.D. Thesis, Swiss Federal Institute of Technology, Zurich, Switzerland, 1999. [Google Scholar]
- Hwang, C.L.; Yoon, K. Multiple Attribute Decision Making: Methods and Applications, A State of the Art Survey; Springer: Berlin, Germany, 1981. [Google Scholar] [CrossRef]
- Zitzler, E.; Thiele, L.; Laumanns, M.; Fonseca, C.M.; Da Fonseca, V.G. Performance Assessment of Multiobjective Optimizers: An Analysis and Review. IEEE Trans. Evol. Comput. 2003, 7, 117–132. [Google Scholar] [CrossRef] [Green Version]
- Zhou, X.-L.; Guo, P.; Chen, B.-W. Comparative Research on Algorithms for Computing Hypervolume. Comput. Eng. 2011, 37, 152–157. [Google Scholar] [CrossRef]
- National Weather Data Center [EB/OL]. Available online: http://data.cma.cn/ (accessed on 5 January 2021).
- Hunan Province Electricity Rate Price List in 2020 [EB/OL]. Available online: http://m.cs.bendibao.com/news/63055.shtm (accessed on 11 January 2021).
- Pipeline Gas Charges [EB/OL]. Available online: http://www.cs95158.cn/contents/68/1594.html (accessed on 15 February 2021).
- Kazimipour, B.; Li, X.; Qin, A.K. A review of population initialization techniques for evolutionary algorithms. In Proceedings of the 2014 IEEE Congress on Evolutionary Computation, Beijing, China, 6–11 July 2014; pp. 2585–2592. [Google Scholar] [CrossRef]
- Glamsch, J.; Rosnitschek, T.; Rieg, F. Initial population influence on hyper-volume convergence of NSGA-III. Int. J. Simul. Model. 2021, 20, 123–133. [Google Scholar] [CrossRef]
- Jiang, S.; Zhang, J.; Ong, Y.S.; Zhang, A.N.; Tan, P.S. A Simple and Fast Hypervolume Indicator-Based Multiobjective Evolutionary Algorithm. IEEE Trans. Cybern. 2015, 10, 2202–2213. [Google Scholar] [CrossRef] [PubMed]
- Deb, K. Multi-Objective Optimization Using Evolutionary Algorithms: An Introduction [EB/OL]. Available online: http://www.iitk.ac.in/kangal/deb.htm (accessed on 10 February 2021).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equipment | Unit Price (CNY/m2) | Maintenance Cost Coefficient (CNY/kWh) | Life Cycle (Year) |
|---|---|---|---|
| PV | 2500 | 0.015 | 15.0 |
| GB | 900 | 0.003 | 20.0 |
| SC | 1600 | 0.03 | 30.0 |
| GSHP | 3000 | 0.01 | 20.0 |
| ASHP | 1200 | 0.02 | 20.0 |
| HE | 220 | 0.002 | 20.0 |
| ES | 1950 | 0.0026 | 15.0 |
| HS | 1000 | 0.013 | 20.0 |
| Types | Charge Efficiency | Discharge Efficiency | Discharge Rate | Loss Rate | Unit Replacement Cost |
|---|---|---|---|---|---|
| Lead storage battery | 0.95 | 0.95 | 0.2 | 0.001 | 200 CNY/kWh |
| Heat storage tank | 0.90 | 0.90 | 0.2 | 0.01 | 150 CNY/kWh |
| No. | Economy (CNY) | Environment (kg) | Energy Efficiency | HV |
|---|---|---|---|---|
| 1 | 2,754,550 | 1,939,800 | 6.67 | 0.6072 |
| 2 | 2,730,050 | 1,989,520 | 6.50 | 0.6012 |
| 3 | 2,633,940 | 1,795,120 | 7.26 | 0.6519 |
| 4 | 2,822,240 | 2,120,480 | 6.06 | 0.5744 |
| 5 | 2,837,010 | 2,119,480 | 6.06 | 0.5709 |
| 6 | 2,763,860 | 1,952,200 | 6.65 | 0.6053 |
| 7 | 2,814,680 | 2,048,480 | 6.29 | 0.5822 |
| 8 | 2,588,580 | 1,761,360 | 7.41 | 0.6618 |
| 9 | 2,753,010 | 1,966,520 | 6.58 | 0.6215 |
| 10 | 1,881,010 | 2,029,160 | 6.36 | 0.5927 |
| No. | Economy (CNY) | Environment (kg) | Energy Efficiency | HV |
|---|---|---|---|---|
| 1 | 2,472,380 | 1,523,400 | 8.88 | 0.7559 |
| 2 | 2,437,870 | 1,511,920 | 8.96 | 0.7217 |
| 3 | 2,429,190 | 1,513,000 | 8.96 | 0.7228 |
| 4 | 2,427,650 | 1,511,800 | 8.96 | 0.7198 |
| 5 | 2,495,830 | 1,517,800 | 8.92 | 0.7682 |
| 6 | 2,440,460 | 1,512,640 | 8.96 | 0.7215 |
| 7 | 2,465,870 | 1,518,840 | 8.92 | 0.7627 |
| 8 | 2,442,490 | 1,059,360 | 8.98 | 0.7186 |
| 9 | 2,418,620 | 1,512,360 | 8.96 | 0.7215 |
| 10 | 2,447,740 | 1,512,440 | 8.96 | 0.7175 |
| Methods | Weight Methods | Life Cycle Costs (CNY) | Life Cycle Carbon Emissions (kg) | Energy Efficiency | GB (kW) | PV (m2) | SC (m2) | (kW) | (kW) | (kW) | (kW) | HE (kW) | ES (kWh) | HS (kWh) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| NSGA-II | Mean value | 2,589,580 | 1,761,360 | 7.41 | 101.13 | 252.42 | 119.58 | 200 | 144.3 | 33 | 5.7 | 776.45 | 107.48 | 162.13 |
| Entropy weight | 2,589,580 | 1,761,360 | 7.41 | 101.13 | 252.42 | 119.58 | 200 | 144.3 | 33 | 5.7 | 776.45 | 107.48 | 162.13 | |
| NSGA-III | Mean value | 2,472,380 | 152,300 | 8.88 | 413.48 | 371.39 | 0.6146 | 199.93 | 145.41 | 33.07 | 4.59 | 400.28 | 147.08 | 51.296 |
| Entropy weight | 2,418,620 | 1,512,360 | 8.96 | 216.19 | 371.03 | 0.96546 | 199.7 | 145.51 | 87.49 | 4.49 | 283.38 | 144.36 | 27.863 | |
| Both algorithms combined | Mean value | 2,427,650 | 1,511,800 | 8.96 | 199.79 | 370.4 | 1.5978 | 199.87 | 144.27 | 33.13 | 5.73 | 351.19 | 148.11 | 74.859 |
| Entropy weight | 2,472,380 | 1,523,400 | 8.88 | 413.48 | 371.39 | 0.6146 | 199.93 | 145.41 | 33.07 | 4.59 | 400.28 | 147.08 | 51.296 |
| Life Cycle Cost (CNY) | Life Cycle Carbon Emissions (kg) | Energy Efficiency | GB (kW) | PV (m2) | SC (m2) | (kW) | (kW) | (kW) | (kW) | HE (kW) | ES (kWh) | HS (kWh) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 2,412,200 | 1,507,300 | 8.99 | 200 | 372 | 0 | 200 | 145 | 33 | 5 | 352 | 150 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Wang, H.; Tang, Y.; Wang, Z. Optimization of a Multi-Energy Complementary Distributed Energy System Based on Comparisons of Two Genetic Optimization Algorithms. Processes 2021, 9, 1388. https://doi.org/10.3390/pr9081388
Liu C, Wang H, Tang Y, Wang Z. Optimization of a Multi-Energy Complementary Distributed Energy System Based on Comparisons of Two Genetic Optimization Algorithms. Processes. 2021; 9(8):1388. https://doi.org/10.3390/pr9081388
Chicago/Turabian StyleLiu, Changrong, Hanqing Wang, Yifang Tang, and Zhiyong Wang. 2021. "Optimization of a Multi-Energy Complementary Distributed Energy System Based on Comparisons of Two Genetic Optimization Algorithms" Processes 9, no. 8: 1388. https://doi.org/10.3390/pr9081388
APA StyleLiu, C., Wang, H., Tang, Y., & Wang, Z. (2021). Optimization of a Multi-Energy Complementary Distributed Energy System Based on Comparisons of Two Genetic Optimization Algorithms. Processes, 9(8), 1388. https://doi.org/10.3390/pr9081388