Distributed Secondary Voltage Control for DC Microgrids with Consideration of Asynchronous Sampling


Abstract
:1. Introduction
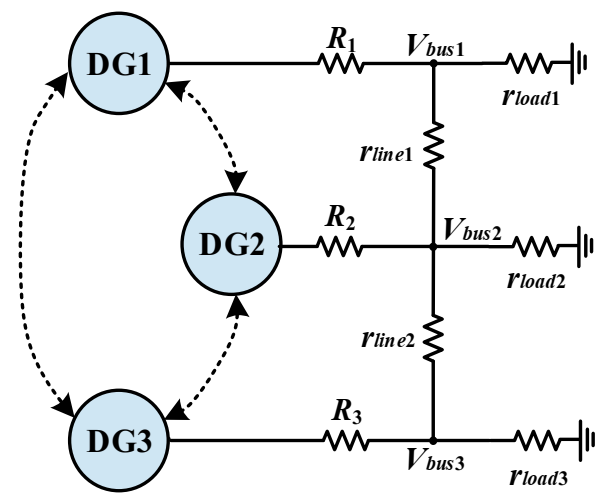
2. MG Hierarchical Control and Problem Formulation
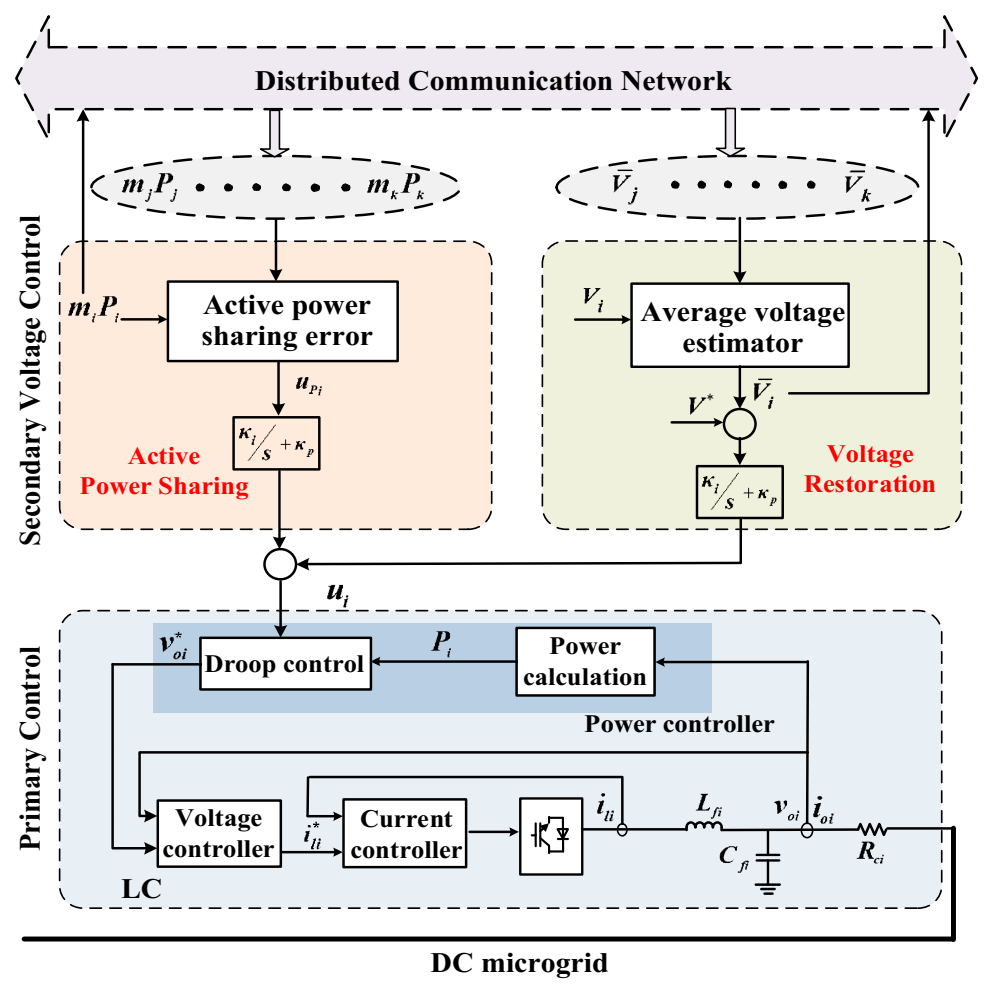
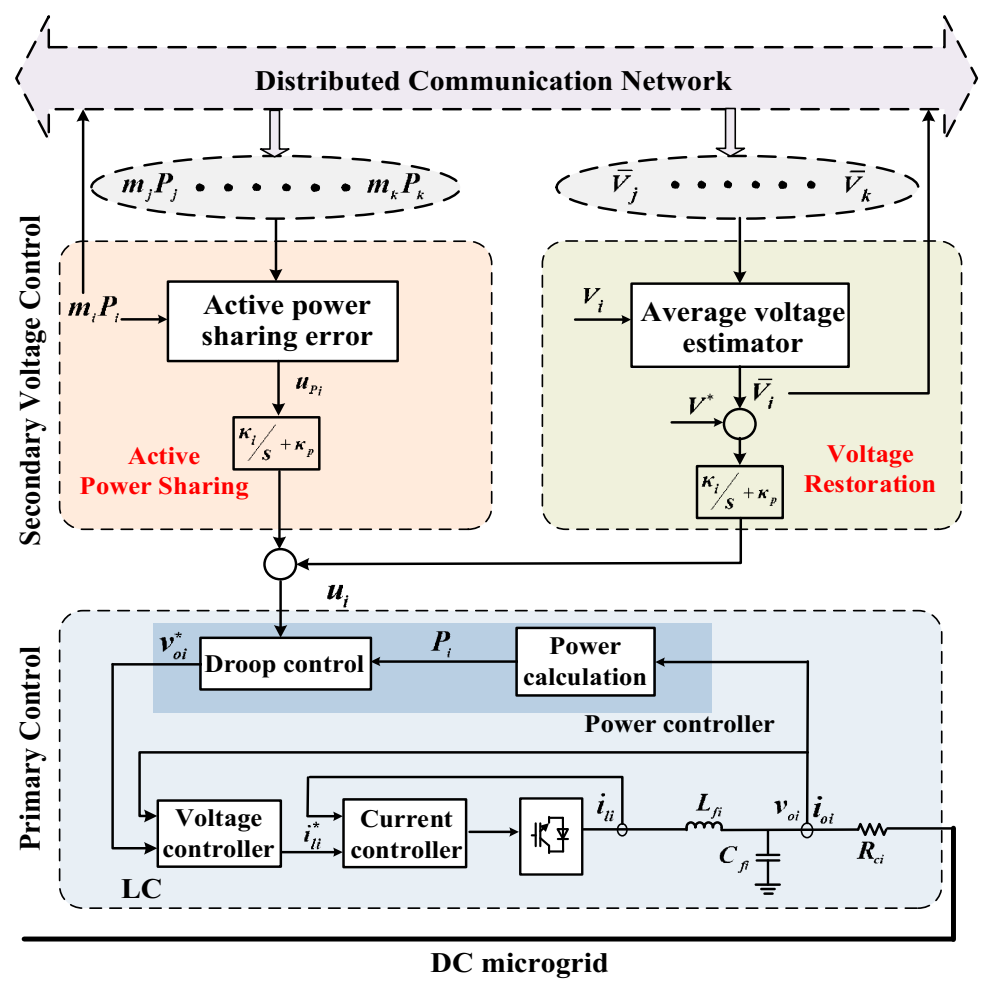
2.1. Primary Control and Distributed Secondary Control
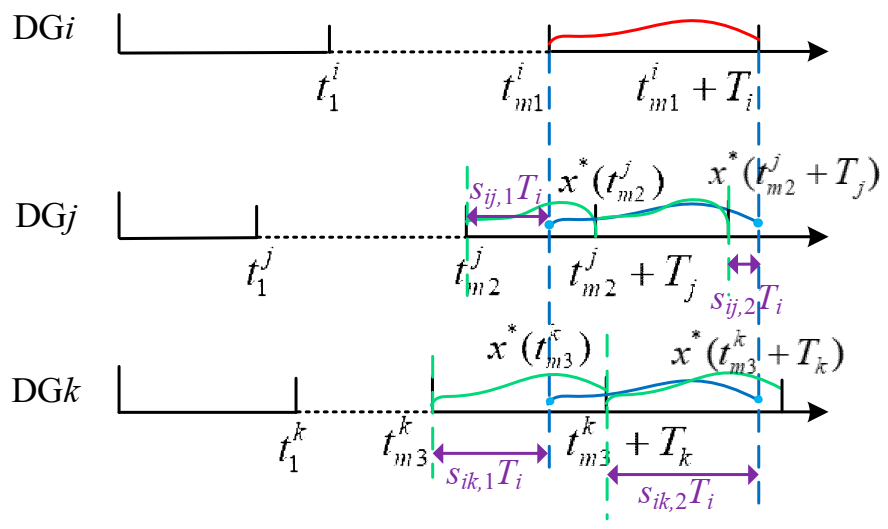
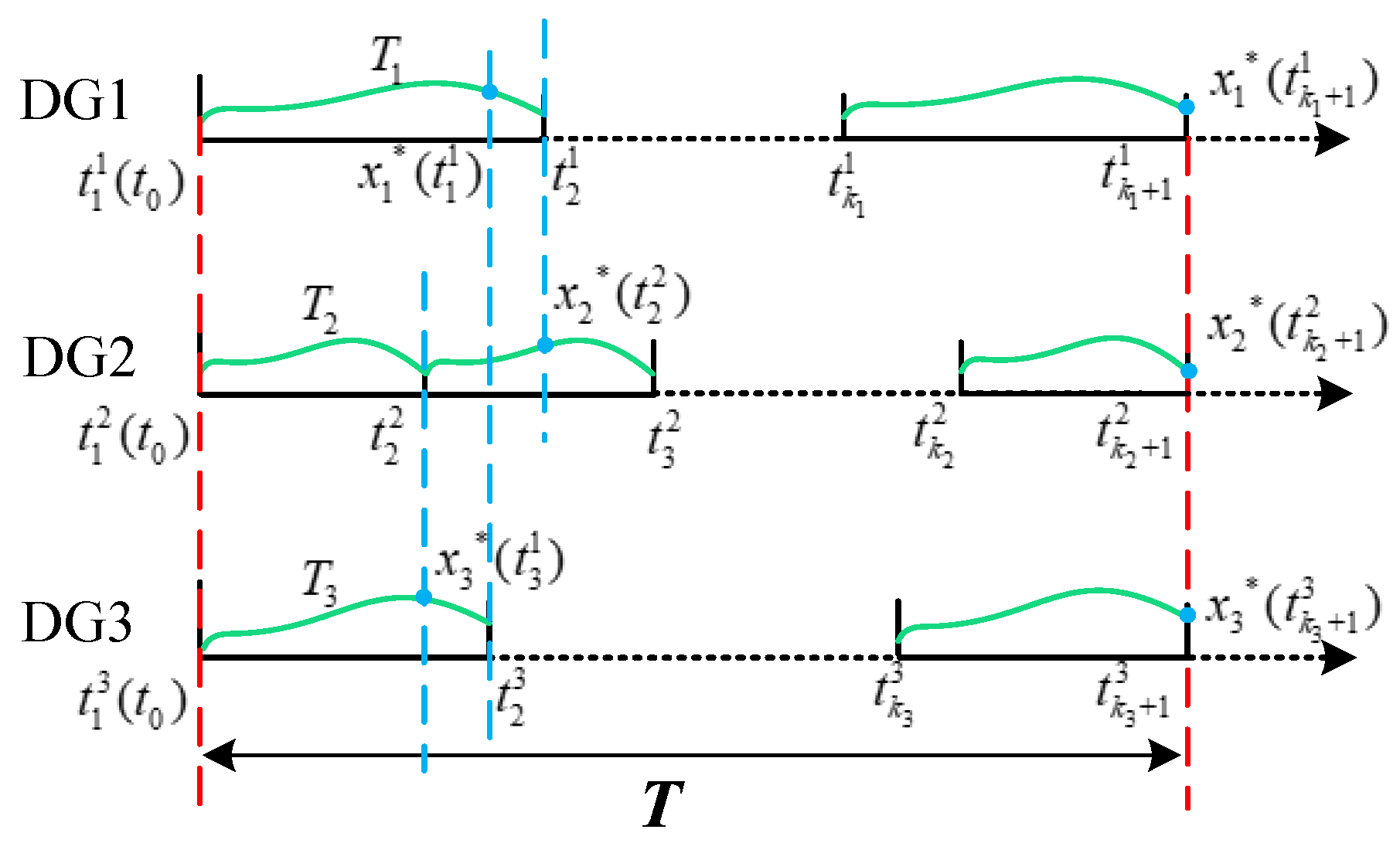
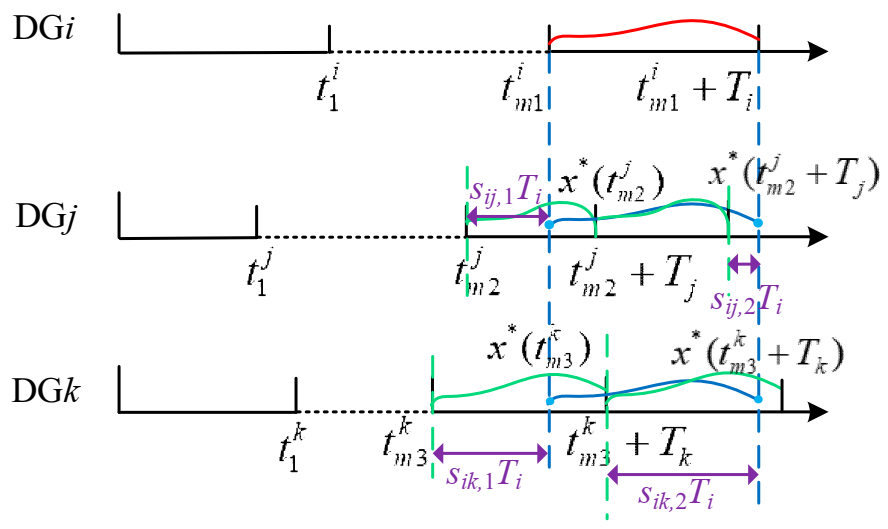
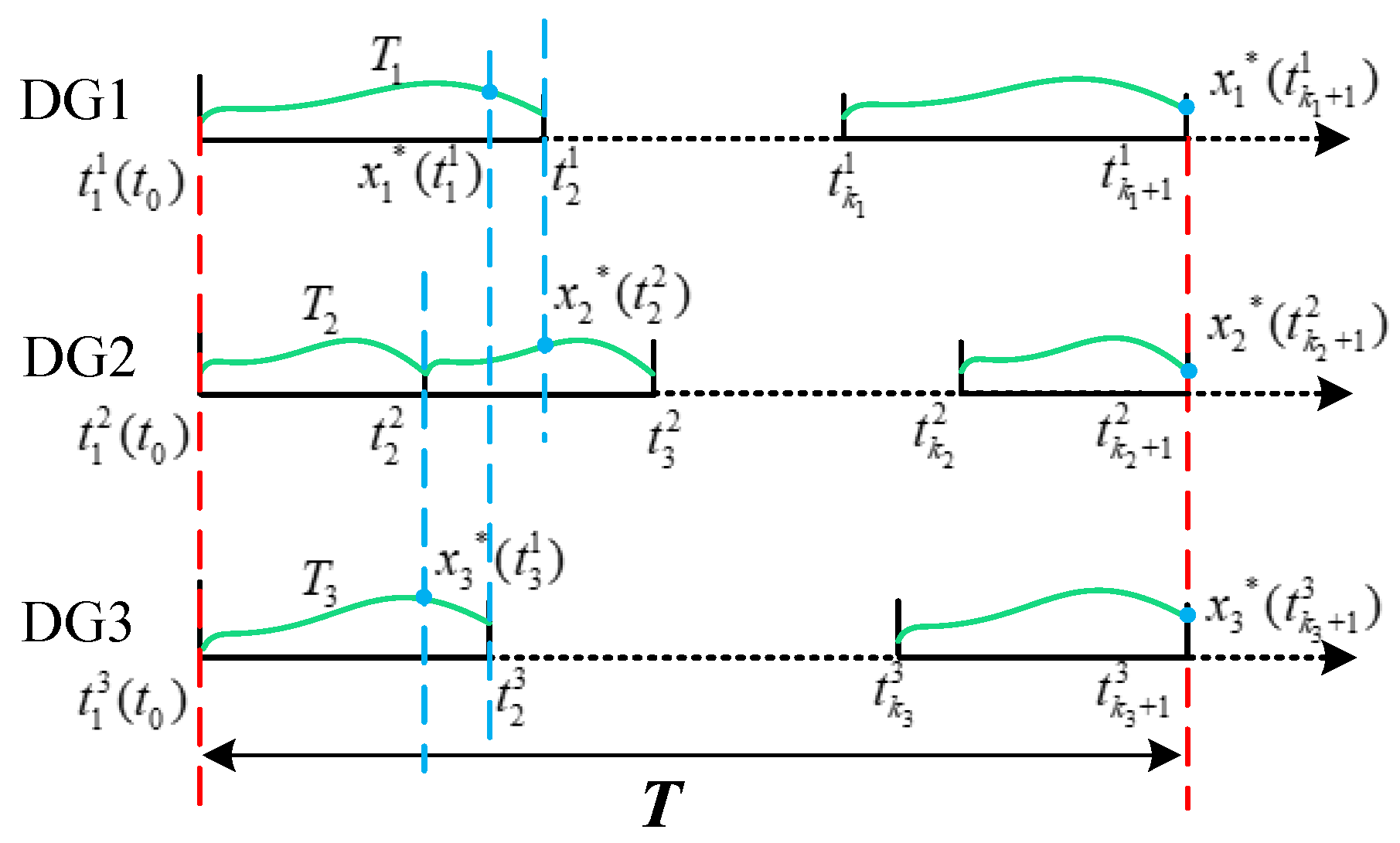
2.2. Problem Formulation of Asynchronous Samplinlg
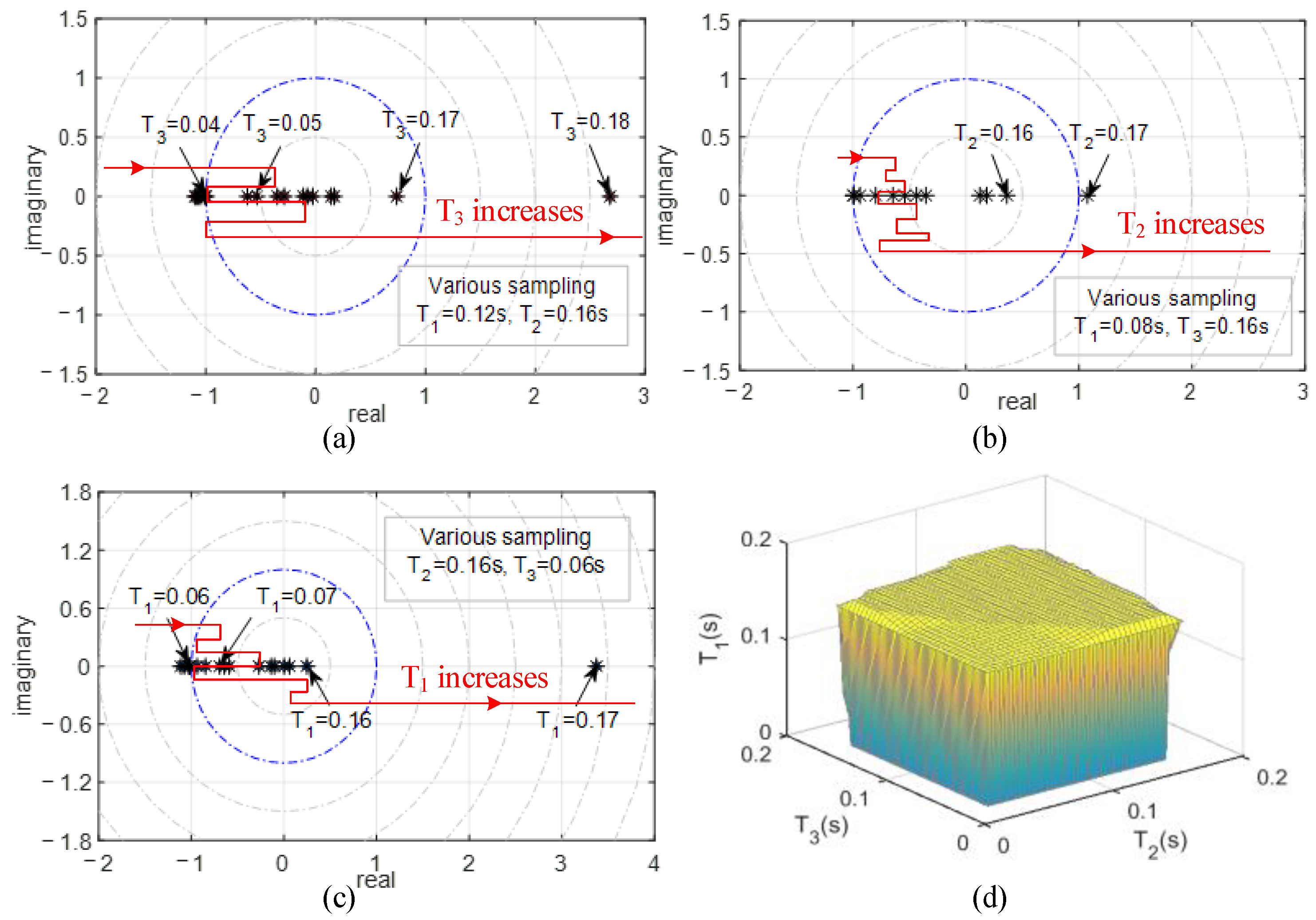
3. Stability Analysis in the Asynchronous Sampling Period Case
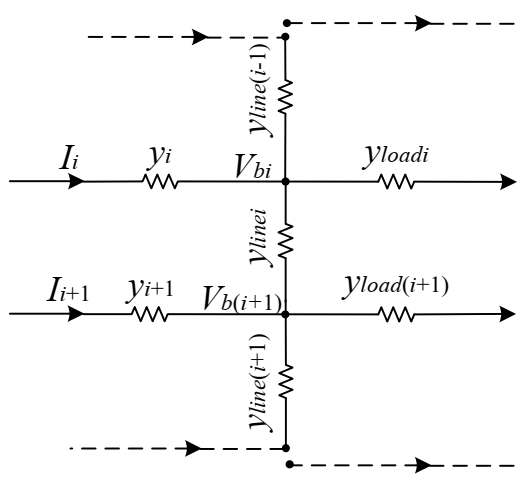
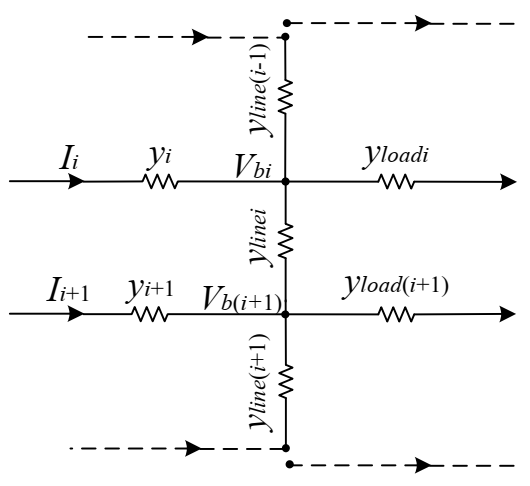
3.1. Small-Signal Modeling
3.2. Asynchronous Sampling-Dependent Stability Analysis
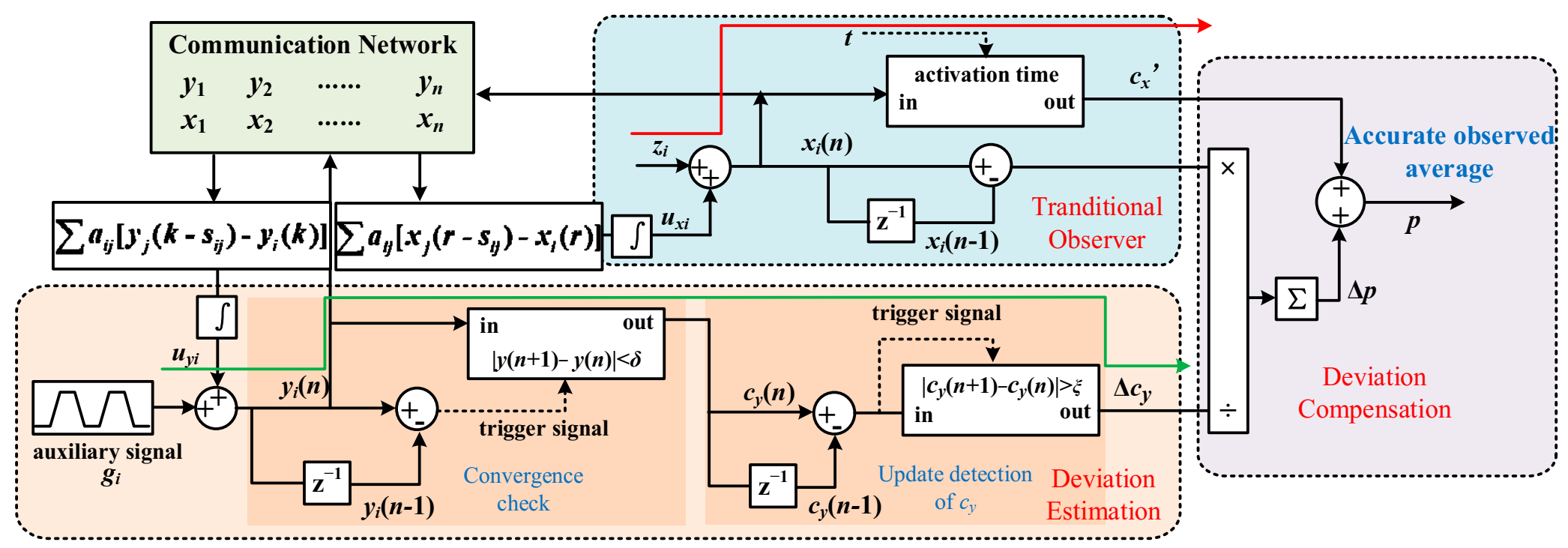
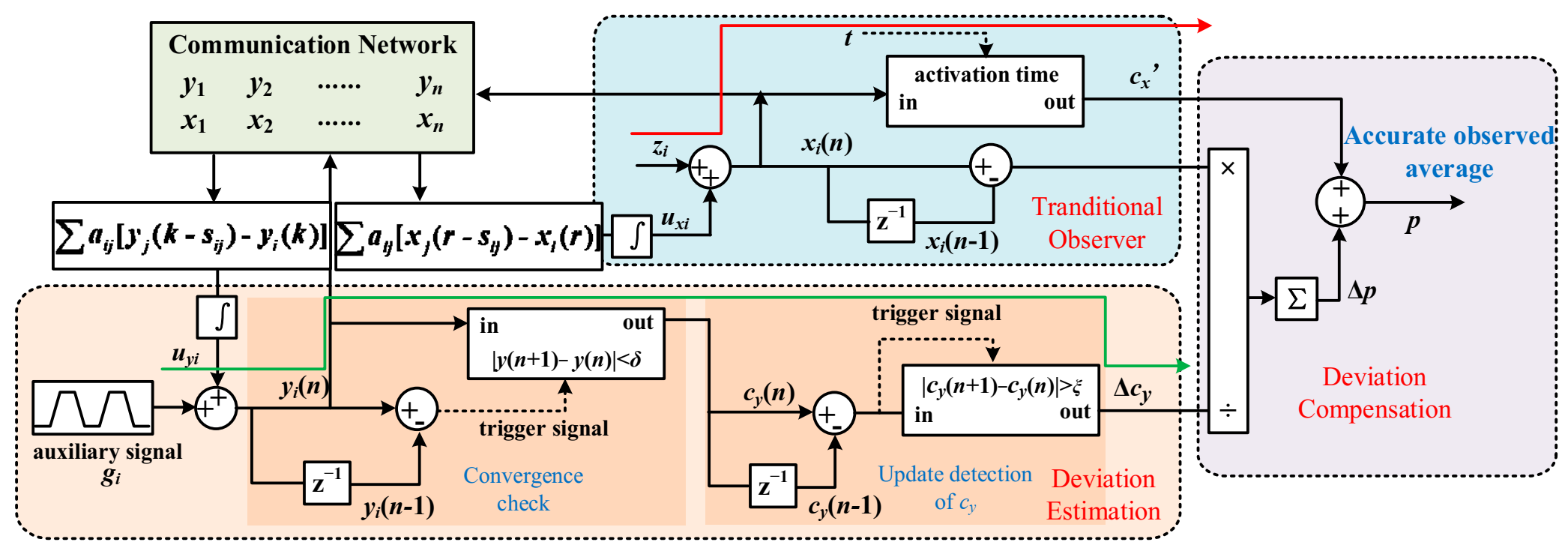
4. Improved Ratio Consensus Algorithm
4.1. Ratio Consensus Algorithm
4.2. Improved Consensus Algorithm
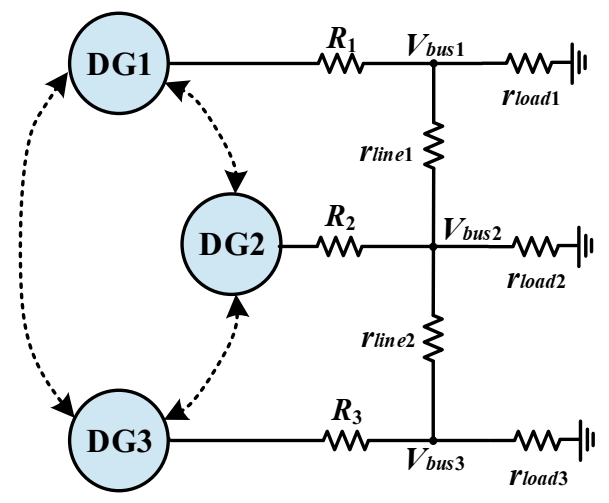
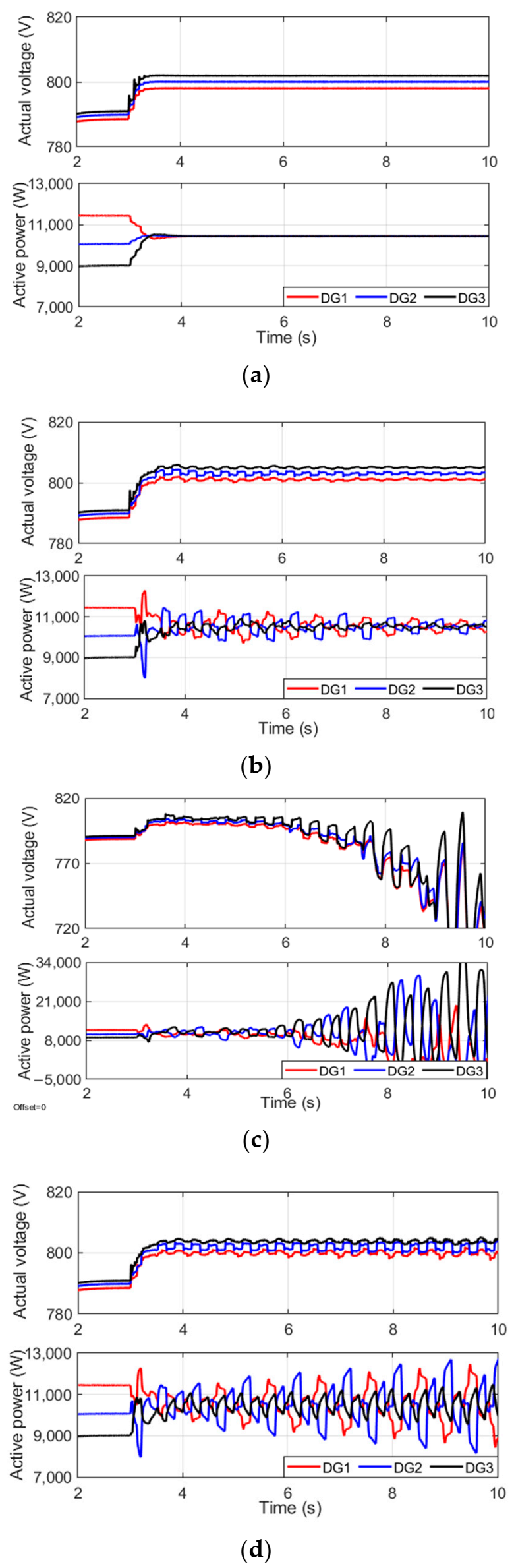
5. Simulation Results
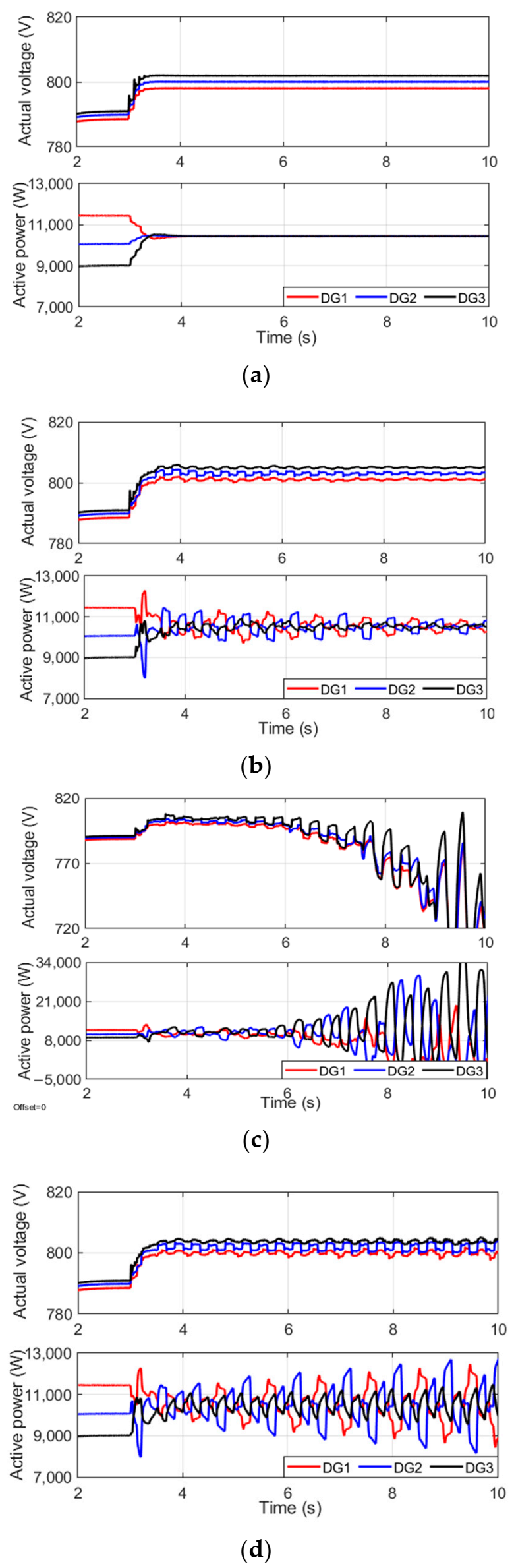
5.1. Stability Analysis
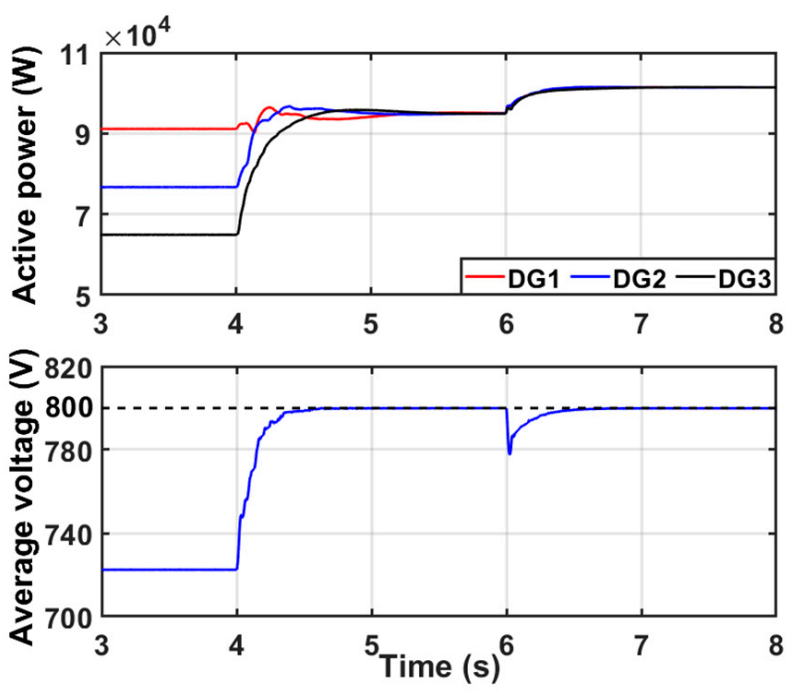
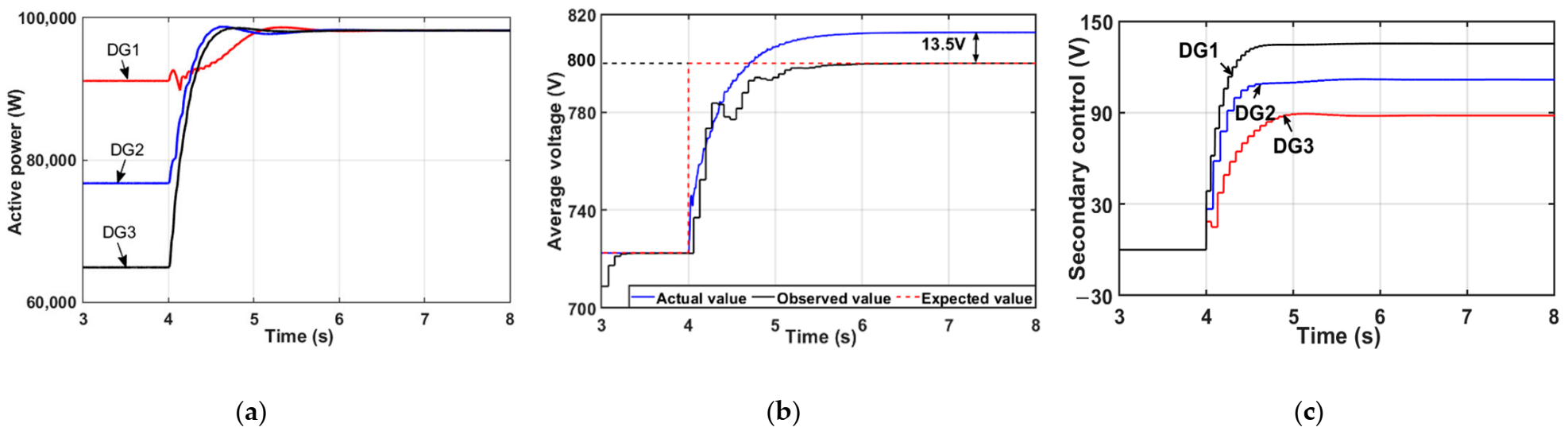
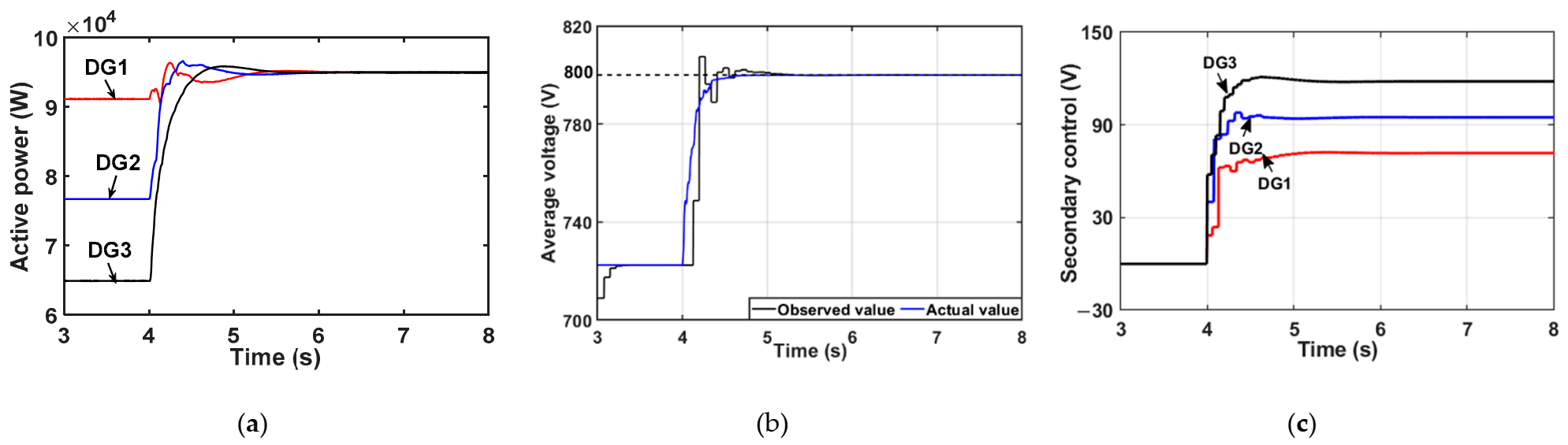
5.2. Accuracy Analysis
5.3. Discussion of the results
- (1)
- The simulation results accord well with the theoretical analysis, which verifies the effectiveness of the proposed analytical method.
- (2)
- The increase of one individual control period would lead to system instability.
- (3)
- The enlargement of the disagreement between control periods of various DGs can also cause system instability.
- (4)
- The asynchronization between control periods would give rise to steady-state deviation when adopting the conventional consensus control, whereas the deviation can be effectively eliminated using the improved ratio consensus algorithm proposed in this paper.
- (5)
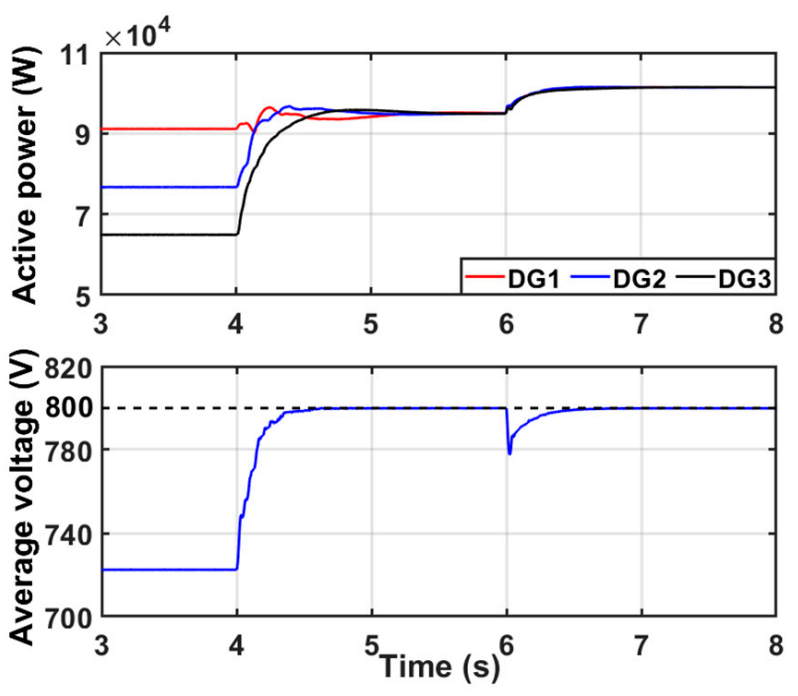
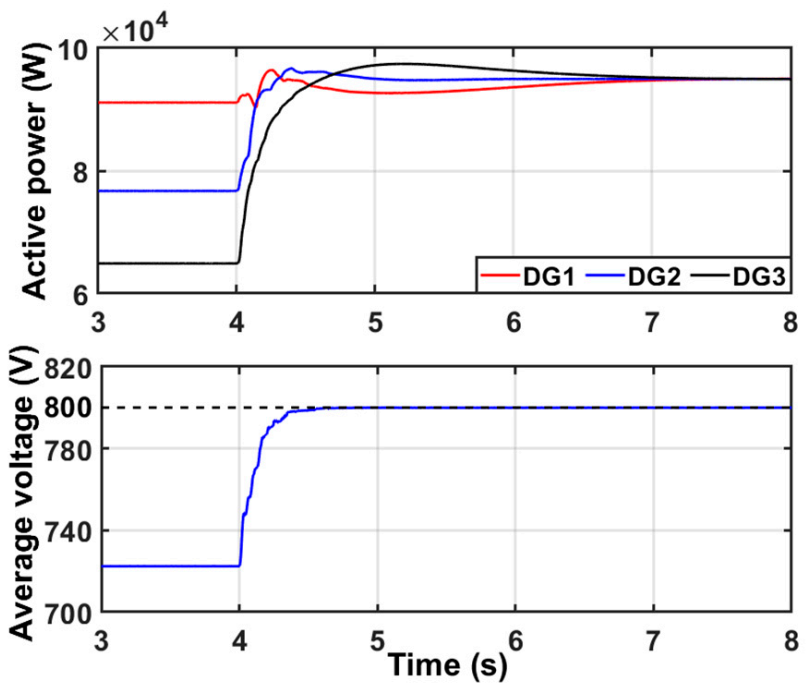
- The proposed algorithm would be effective regardless of load variation or topology switch.
6. Conclusions
- The system could come to be unstable when any individual control period becomes larger.
- Expansion of asynchronous degree can also lead to system instability.
- Steady-state deviation would occur in case of asynchronous control periods when adopting the conventional consensus control, whereas the deviation can be effectively eliminated using the proposed control method.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Appendix A
References
- Yu, K.; Ai, Q.; Wang, S.; Ni, J.; Lv, T. Analysis and optimization of droop controller for microgrid system based on small-signal dynamic model. IEEE Trans. Smart Grid 2016, 7, 695–705. [Google Scholar] [CrossRef]
- Lou, G.; Gu, W.; Xu, Y.; Jin, W.; Du, X. Stability robustness for secondary voltage control in autonomous microgrids with consideration of communication delays. IEEE Trans. Power Syst. 2018, 33, 4164–4178. [Google Scholar] [CrossRef]
- Liu, S.; Wang, X.; Liu, P.X. Impact of communication delays on secondary frequency control in an islanded microgrid. IEEE Trans. Ind. Electron. 2015, 62, 2021–2031. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W. Analysis, design, and implementation of virtual impedance for power electronics interfaced distributed generation. IEEE Trans. Ind. Appl. 2011, 47, 2525–2538. [Google Scholar] [CrossRef]
- Li, Z.; Shahidehpour, M. Small-signal modeling and stability analysis of hybrid AC/DC microgrids. IEEE Trans. Smart Grid 2019, 10, 2080–2095. [Google Scholar] [CrossRef]
- Dong, M.; Li, L.; Nie, Y.; Song, D.; Yang, J. Stability analysis of a novel distributed secondary control considering communication delay in DC microgrids. IEEE Trans. Smart Grid 2019, 10, 6690–6700. [Google Scholar] [CrossRef]
- Dou, C.; Yue, D.; Guerrero, J.M.; Xie, X.; Hu, S. Multiagent system-based distributed coordinated control for radial DC microgrid considering transmission time delays. IEEE Trans. Smart Grid 2017, 8, 2370–2381. [Google Scholar] [CrossRef] [Green Version]
- de Nadai Nascimento, B.; Zambroni de Souza, A.C.; Marujo, D.; Sarmiento, J.E.; Alvez, C.A.; Portelinha, F.M., Jr.; de Carvalho Costa, J.G. Centralised secondary control for islanded microgrids. IET Renew. Power Gener. 2020, 14, 1502–1511. [Google Scholar] [CrossRef]
- Qian, T.; Liu, Y.; Zhang, W.; Tang, W.; Shahidehpour, M. Event-triggered updating method in centralized and distributed secondary controls for islanded microgrid restoration. IEEE Trans. Smart Grid 2020, 11, 1387–1395. [Google Scholar] [CrossRef]
- Guo, F.; Xu, Q.; Wen, C.; Wang, L.; Wang, P. Distributed secondary control for power allocation and voltage restoration in islanded DC microgrids. IEEE Trans. Sustain. Energy 2018, 9, 1857–1869. [Google Scholar] [CrossRef]
- Nasirian, V.; Moayedi, S.; Davoudi, A.; Lewis, F.L. Distributed cooperative control of DC microgrids. IEEE Trans. Power Electron. 2015, 30, 2288–2303. [Google Scholar] [CrossRef]
- Xing, L.; Mishra, Y.; Guo, F.; Lin, P.; Yang, Y.; Ledwich, G.; Tian, Y. Distributed secondary control for current sharing and voltage restoration in DC microgrid. IEEE Trans. Smart Grid 2020, 11, 2487–2497. [Google Scholar] [CrossRef]
- Baranwal, M.; Askarian, A.; Salapaka, S.; Salapaka, M. A distributed architecture for robust and optimal control of DC microgrids. IEEE Trans. Ind. Electron. 2019, 66, 3082–3092. [Google Scholar] [CrossRef]
- Morstyn, T.; Hredzak, B.; Demetriades, G.D.; Agelidis, V.G. Unified distributed control for DC microgrid operating modes. IEEE Trans. Power Syst. 2016, 31, 802–812. [Google Scholar] [CrossRef]
- Fan, B.; Peng, J.; Yang, Q.; Liu, W. Distributed periodic event-triggered algorithm for current sharing and voltage regulation in DC microgrids. IEEE Trans. Smart Grid 2020, 11, 577–589. [Google Scholar] [CrossRef]
- Wang, P.; Lu, X.; Yang, X.; Wang, W.; Xu, D. An improved distributed secondary control method for DC microgrids with enhanced dynamic current sharing performance. IEEE Trans. Power Electron. 2016, 31, 6658–6673. [Google Scholar] [CrossRef]
- Liu, X.; Jiang, H.; Wang, Y.; He, H. A distributed iterative learning framework for DC microgrids: Current sharing and voltage regulation. IEEE Trans. Emerg. Top. Comput. Intell. 2020, 4, 119–129. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, T.; Luo, F.; Li, F.; Liu, Y. Impacts of cyber system on microgrid operational reliability. IEEE Trans. Smart Grid 2019, 10, 105–115. [Google Scholar] [CrossRef]
- Mattioni, M. On multiconsensus of multi-agent systems under aperiodic and asynchronous sampling. IEEE Contr. Syst. Lett. 2020, 4, 839–844. [Google Scholar] [CrossRef]
- Zhan, J.; Li, X. Asynchronous consensus of multiple double- integrator agents with arbitrary sampling intervals and communication delays. IEEE Trans. Circuits Syst. I Reg. Pap. 2015, 62, 2301–2311. [Google Scholar] [CrossRef]
- Lou, G.; Gu, W.; Lu, X.; Xu, Y.; Hong, H. Distributed secondary voltage control in islanded microgrids with consideration of communication network and time delays. IEEE Trans. Smart Grid 2020, 11, 3702–3715. [Google Scholar] [CrossRef]
- Coelho, E.A.; Wu, D.; Guerrero, J.M.; Vasquez, J.C.; Dragicevic, T.; Stefanovic, C.; Popovski, P. Small-signal analysis of the microgrid secondary control considering a communication time delay. IEEE Trans. Ind. Electron. 2016, 63, 6257–6269. [Google Scholar] [CrossRef] [Green Version]
- Savaghebi, M.; Jalilian, A.; Vasquez, J.C.; Guerrero, J.M. Secondary Control Scheme for Voltage Unbalance Compensation in an Islanded Droop-Controlled Microgrid. IEEE Trans. Smart Grid 2012, 3, 797–807. [Google Scholar] [CrossRef] [Green Version]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; de Vicuna, L.G.; Castilla, M. Hierarchical control of droop-controlled AC and DC microgrids—a general approach toward standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Lai, J.; Lu, X.; Yu, X.; Monti, A.; Zhou, H. Distributed voltage regulation for cyber-physical microgrids with coupling delays and slow switching topologies. IEEE Trans. Syst. Man Cybern. A Syst. 2020, 50, 100–110. [Google Scholar] [CrossRef]
- Meng, X.; Liu, J.; Liu, Z. A Generalized Droop Control for Grid-Supporting Inverter Based on Comparison between Traditional Droop Control and Virtual Synchronous Generator Control. IEEE Trans. Power Electron. 2019, 34, 5416–5438. [Google Scholar] [CrossRef]
- Zhong, Q. Robust Droop Controller for Accurate Proportional Load Sharing Among Inverters Operated in Parallel. IEEE Trans. Ind. Electron. 2013, 60, 1281–1290. [Google Scholar] [CrossRef]
- Fatihcan, M.A. Consensus in networks under transmission delays and the normalized Laplacian. IFAC Proc. Vol. 2010, 43, 277–282. [Google Scholar]
- Khosravi, A.; Kavian, Y.S. Broadcast gossip ratio consensus: Asynchronous distributed averaging in strongly connected networks. IEEE Trans. Signal Process. 2017, 65, 119–129. [Google Scholar] [CrossRef]
- Du, Y.; Tu, H.; Yu, H.; Lukic, S. Accurate consensus-based distributed averaging with variable time delay in support of distributed secondary control algorithms. IEEE Trans. Smart Grid 2020, 11, 2918–2928. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| MG voltage | 800 V | Connection impedances | |
| DG power ratings | R1/R2/R3 | 0.15 Ω/0.3 Ω/0.4 Ω | |
| DG1, DG2, DG3 | 120 kW | Line impedances | |
| Voltage droop coefficient | rline1/rline2 | 0.2 Ω | |
| mP1, mP2, mP3 | 1 × 10−3 V/W | Load ratings | |
| Control parameters | rload1 | 60 Ω/5 Ω | |
| ki1/kp1 | 6/0.5 | rload2 | 60 Ω/5 Ω |
| ki2/kp2 | 10/0.5 | rload3 | 80 Ω/15 Ω |
| ki3 | 3 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lou, G.; Hong, Y.; Li, S. Distributed Secondary Voltage Control for DC Microgrids with Consideration of Asynchronous Sampling. Processes 2021, 9, 1992. https://doi.org/10.3390/pr9111992
Lou G, Hong Y, Li S. Distributed Secondary Voltage Control for DC Microgrids with Consideration of Asynchronous Sampling. Processes. 2021; 9(11):1992. https://doi.org/10.3390/pr9111992
Chicago/Turabian StyleLou, Guannan, Yinqiu Hong, and Shanlin Li. 2021. "Distributed Secondary Voltage Control for DC Microgrids with Consideration of Asynchronous Sampling" Processes 9, no. 11: 1992. https://doi.org/10.3390/pr9111992
APA StyleLou, G., Hong, Y., & Li, S. (2021). Distributed Secondary Voltage Control for DC Microgrids with Consideration of Asynchronous Sampling. Processes, 9(11), 1992. https://doi.org/10.3390/pr9111992