Multi-Objective Coordinated Optimal Allocation of DG and EVCSs Based on the V2G Mode



Abstract
1. Introduction
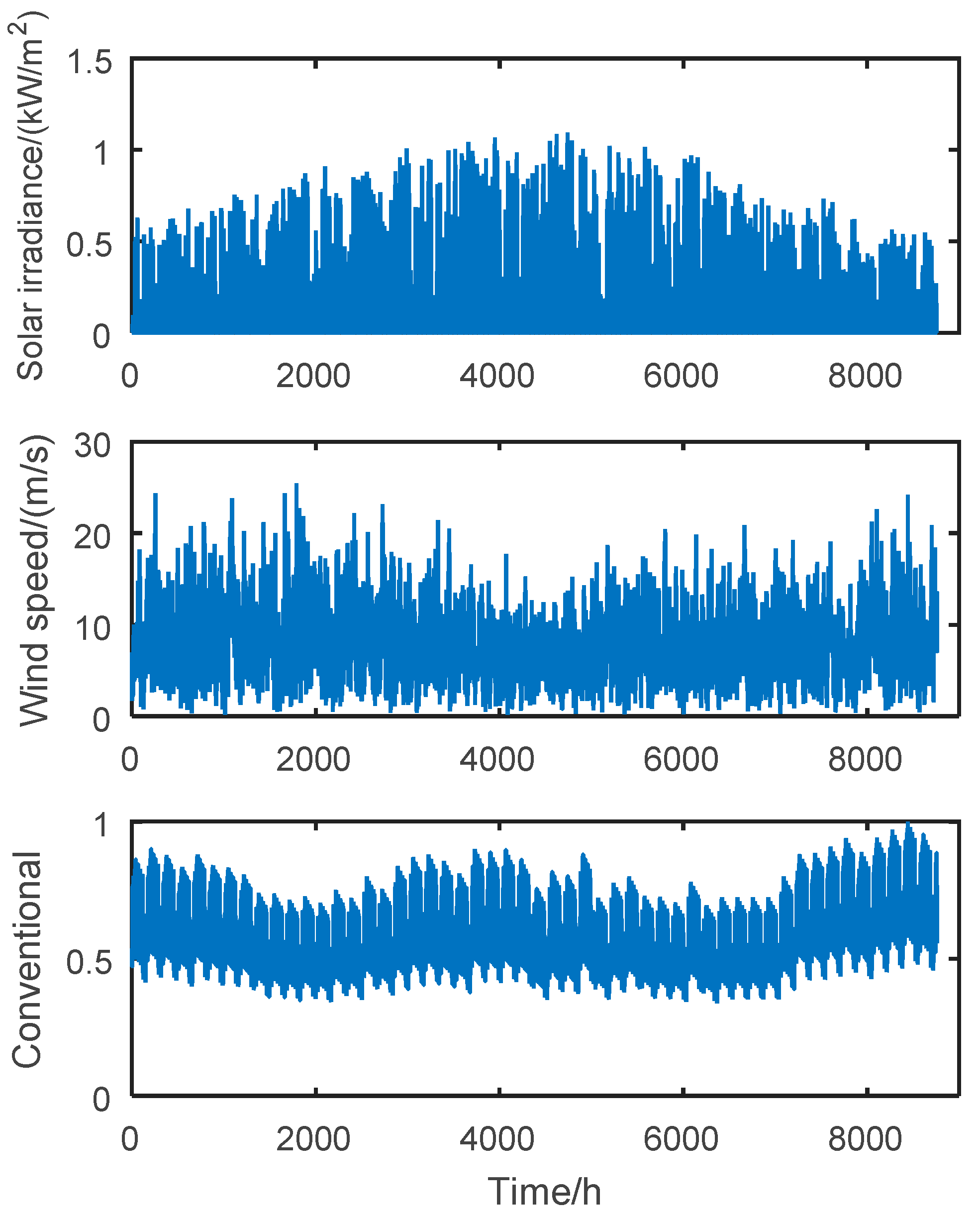
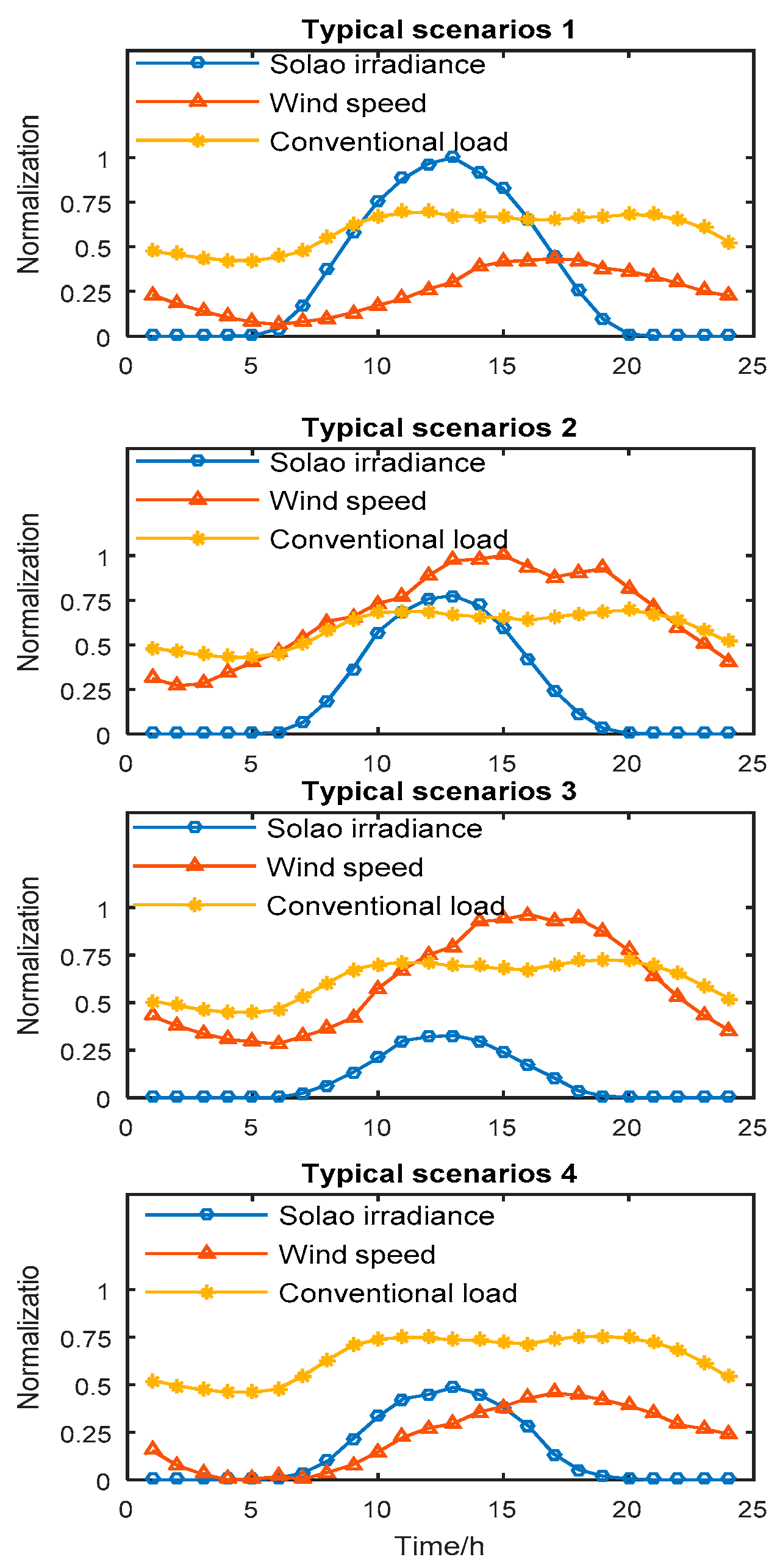
2. Construction of Typical Wind-Photovoltaic Load Scenarios
3. Charging and Discharging Model of EV in V2G Mode
- (1)
- According to the willingness of the users, EVs can be divided into two categories: owners willing to participate in V2G and owners unwilling to participate in V2G.
- (2)
- The required charging time of the EV Tf for the willing-to-participate group is calculated. If Tf is less than the charging time limit Tlim, the given of EV is classed in the same cluster as the unwilling-to-participate group owing to its lack of V2G capabilities.
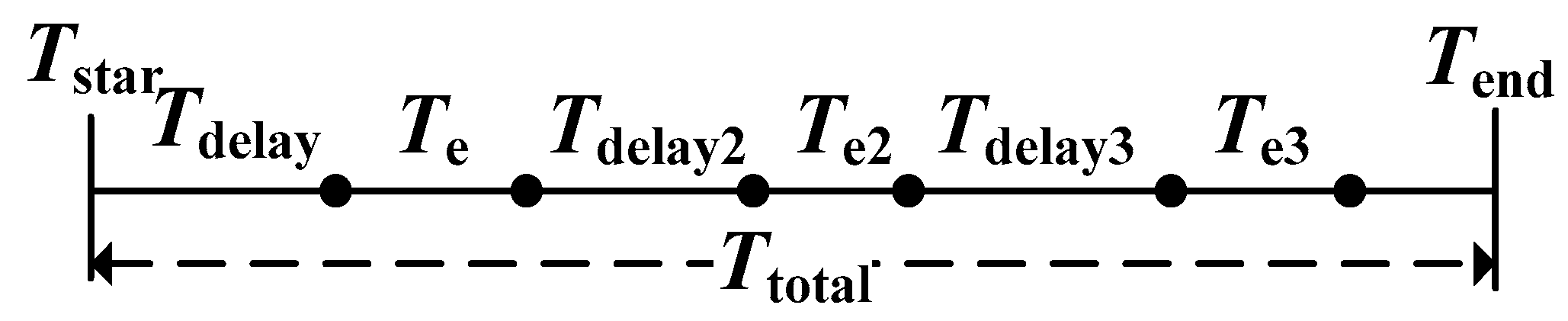
- (3)
- We cluster EVs the owners of which were willing and able to participate in V2G according to Tstar, Te, and Tend. For example, when an EV was connected to the grid from 18:00~19:00 h, the charging time was three to four h, and the off-grid time was 7:00 h the next day. Such EVs were placed in the same cluster.
4. Bi-Level Optimization Model
4.1. Mathematical Model of the Upper Level
4.2. Mathematical Model of the Lower Level
5. Optimal Solution of the Proposed Bi-Level Model
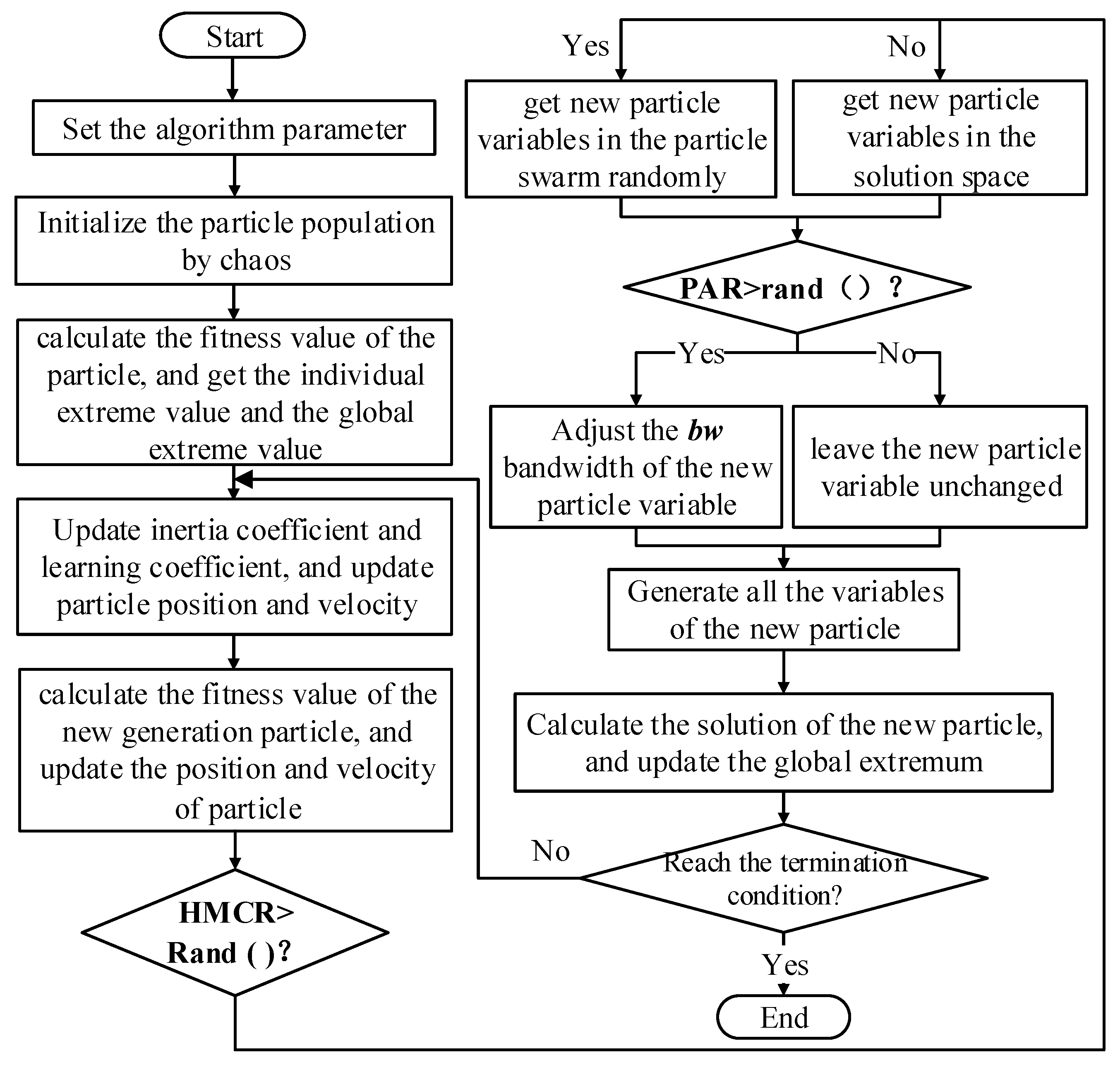
5.1. Improved Harmonic Particle Swarm Optimization
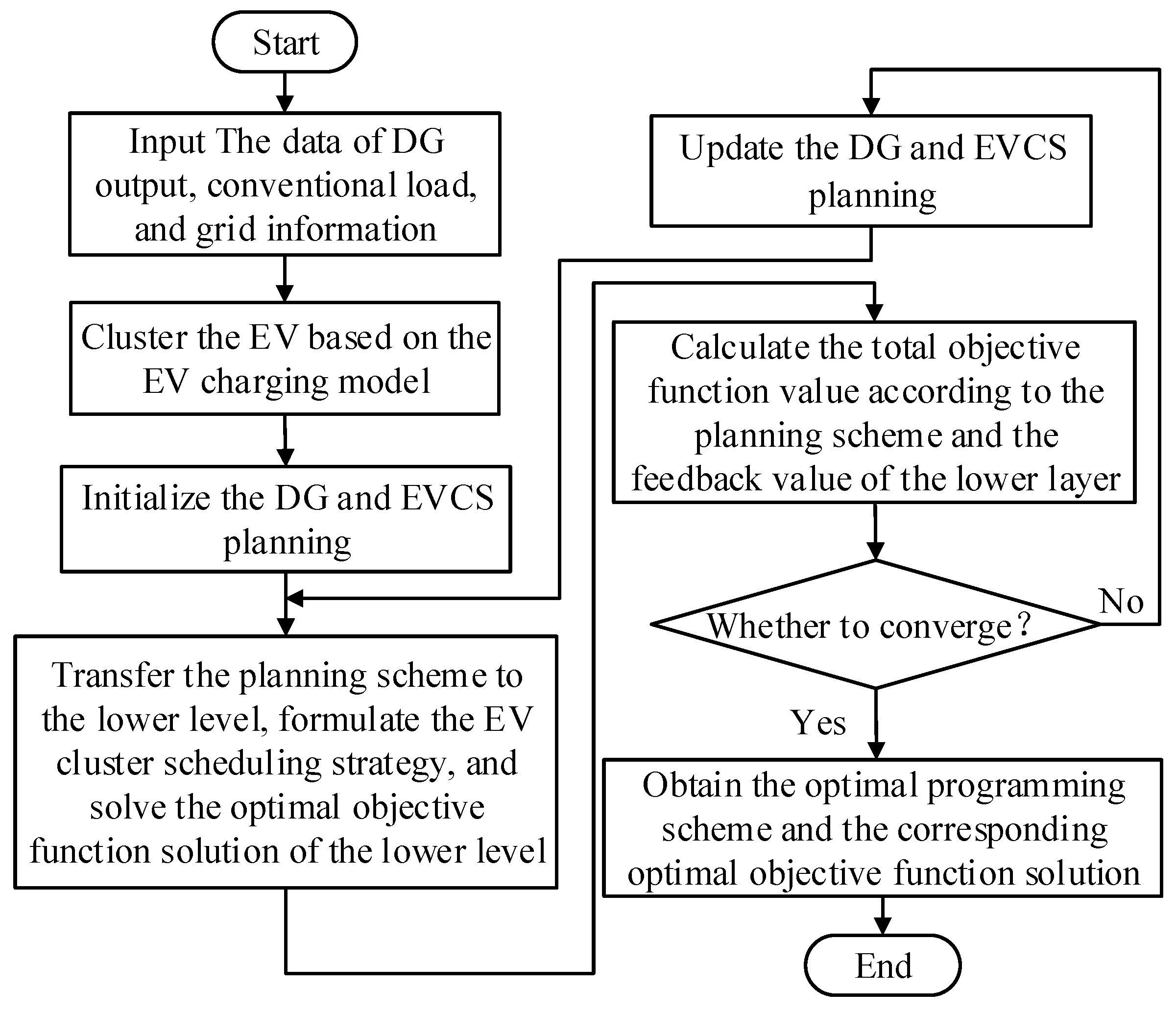
5.2. Flowchart of Bi-Level Programming Model
6. Case Study
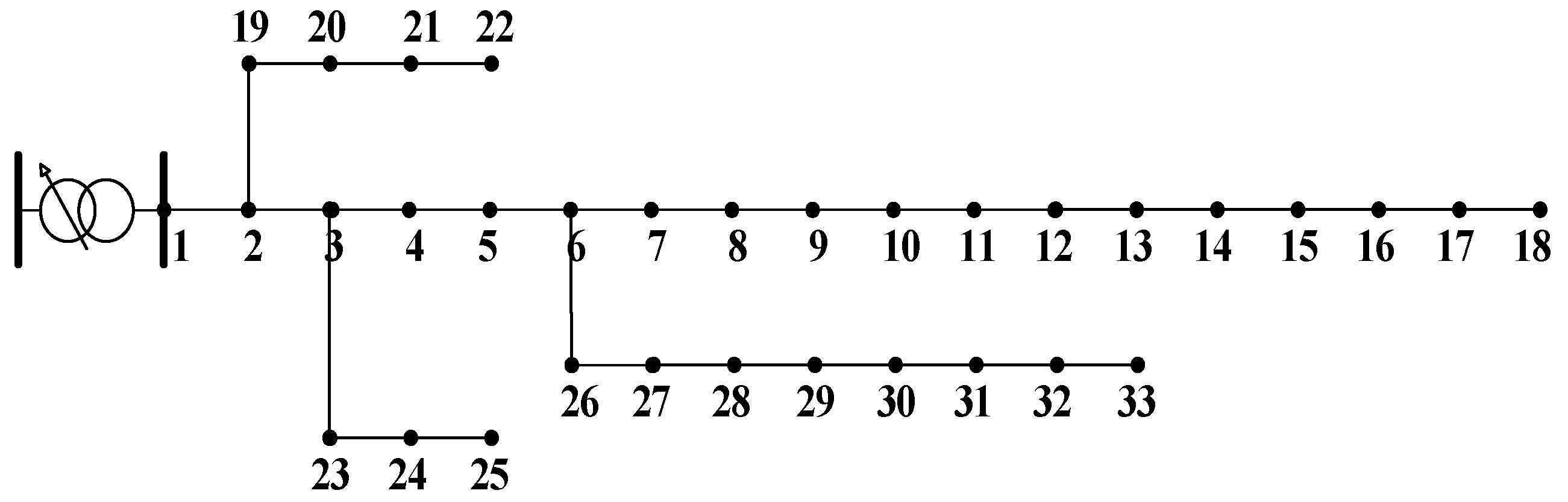
6.1. Parameters of the IEEE-33 Bus Test System
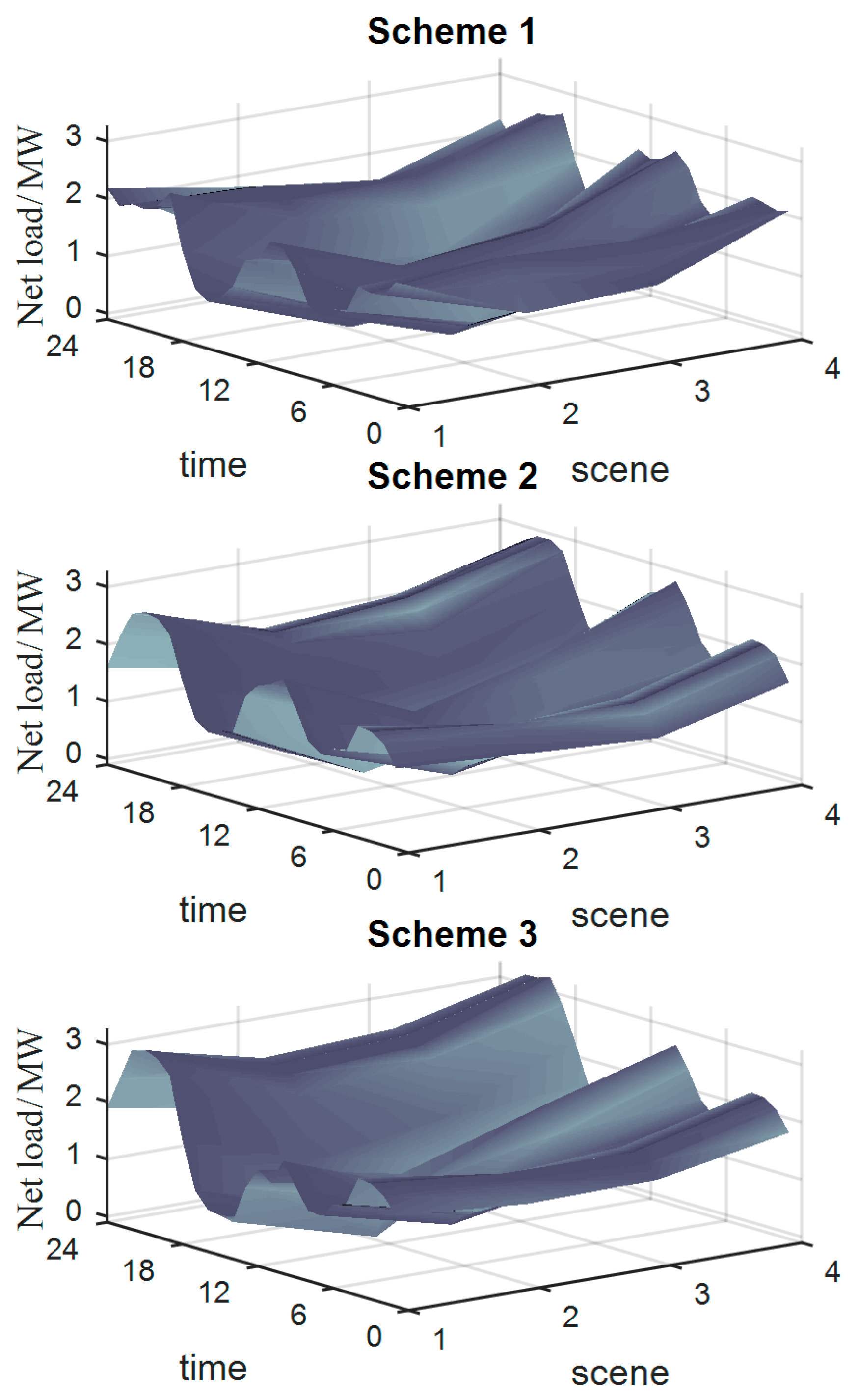
6.2. Analysis of Results
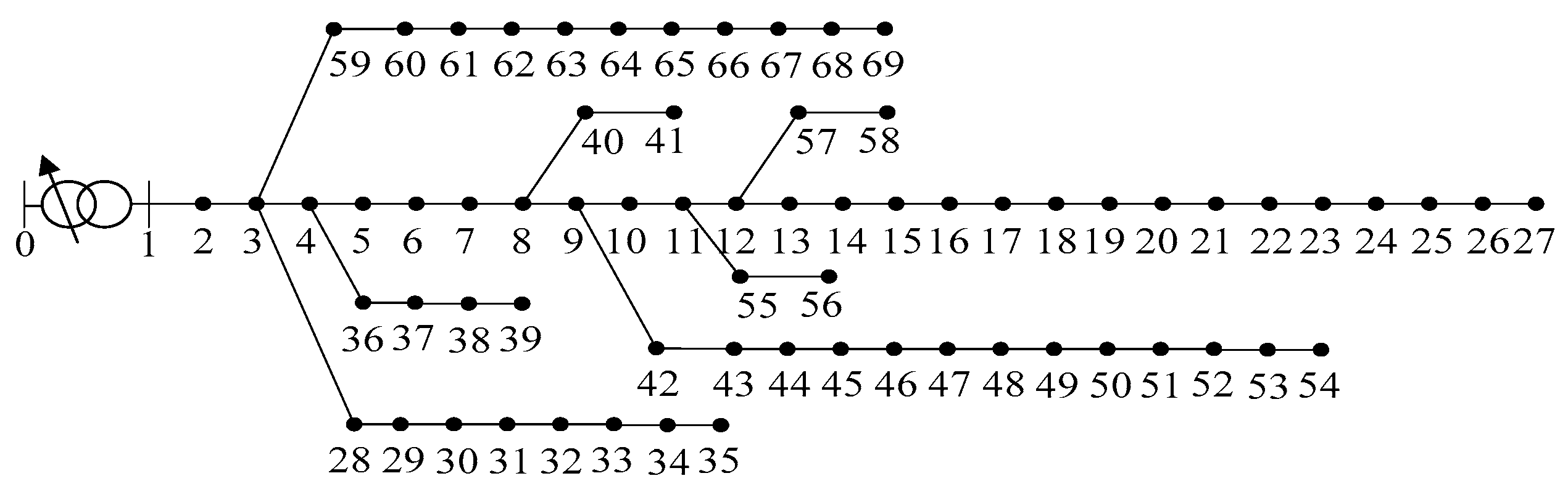
6.3. Case Study Using PG and E-69 Bus Test System
6.4. Comparison of Algorithm Performance
7. Conclusions
- Considering the planning of DG and EVCSs in the V2G mode is conducive to improving the consumption of clean energy and optimizing power flow. In this way, network loss and load fluctuations can be reduced, the quality of voltage can be improved, and a scheme with better overall performance can be obtained.
- In the distribution network with peak and valley prices, the V2G mode can reduce the unit charging cost for EV users, improve EV charging satisfaction, and satisfy the interests of both the distribution company and EV users.
- The objective here was the comprehensive optimization of four indices such as comprehensive profit, voltage quality, system load fluctuation, and EV charging satisfaction so that the objective function of the planning model was complex, which is conducive to considering multiple demands and improving the comprehensive performance of the planning scheme.
- The proposed I-HSPSO algorithm converged quickly, and had a strong global optimization ability, because of which it did not easily to fall into the local optimum. Its performance thus improved.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhao, J.; Xu, Z.; Wang, J.; Wang, C.; Li, J. Robust Distributed Generation Investment Accommodating Electric Vehicle Charging in a Distribution Network. IEEE Trans. Power Syst. 2018, 33, 4654–4666. [Google Scholar] [CrossRef]
- Wang, L.; Sharkh, S.; Chipperfield, A. Optimal decentralized coordination of electric vehicles and renewable generators in a distribution network using A∗ search. Int. J. Electr. Power 2018, 98, 474–487. [Google Scholar] [CrossRef]
- Erdinc, O.; Tascikaraoglu, A.; Paterakis, N.G.; Dursun, I.; Sinim, M.C.; Catalao, J.P.S. Comprehensive Optimization Model for Sizing and Siting of DG Units, EV Charging Stations, and Energy Storage Systems. IEEE Trans. Smart Grid 2018, 9, 3871–3882. [Google Scholar] [CrossRef]
- Yang, H.; Pan, H.; Luo, F.; Qiu, J.; Deng, Y.; Lai, M.; Dong, Z.Y. Operational Planning of Electric Vehicles for Balancing Wind Power and Load Fluctuations in a Microgrid. IEEE Trans. Sustain. Energy 2017, 8, 592–604. [Google Scholar] [CrossRef]
- Banol Arias, N.; Tabares, A.; Franco, J.F.; Lavorato, M.; Romero, R. Robust Joint Expansion Planning of Electrical Distribution Systems and EV Charging Stations. IEEE Trans. Sustain. Energy 2018, 9, 884–894. [Google Scholar] [CrossRef]
- Zhang, C.; Li, J.; Zhang, Y.J.; Xu, Z. Optimal Location Planning of Renewable Distributed Generation Units in Distribution Networks: An Analytical Approach. IEEE Trans. Power Syst. 2018, 33, 2742–2753. [Google Scholar] [CrossRef]
- Luo, L.; Gu, W.; Zhou, S.; Huang, H.; Gao, S.; Han, J.; Wu, Z.; Dou, X. Optimal planning of electric vehicle charging stations comprising multi-types of charging facilities. Appl. Energy 2018, 226, 1087–1099. [Google Scholar] [CrossRef]
- Xiang, Y.; Liu, J.; Li, R.; Li, F.; Gu, C.; Tang, S. Economic planning of electric vehicle charging stations considering traffic constraints and load profile templates. Appl. Energy 2016, 178, 647–659. [Google Scholar] [CrossRef]
- Sarikprueck, P.; Lee, W.; Kulvanitchaiyanunt, A.; Chen, V.C.P.; Rosenberger, J.M. Bounds for Optimal Control of a Regional Plug-in Electric Vehicle Charging Station System. IEEE Trans. Ind. Appl. 2018, 54, 977–986. [Google Scholar] [CrossRef]
- Zhang, H.; Moura, S.J.; Hu, Z.; Qi, W.; Song, Y. Joint PEV Charging Network and Distributed PV Generation Planning Based on Accelerated Generalized Benders Decomposition. IEEE Trans. Transp. Electrif. 2018, 4, 789–803. [Google Scholar] [CrossRef]
- Sultana, U.; Khairuddin, A.B.; Sultana, B.; Rasheed, N.; Qazi, S.H.; Malik, N.R. Placement and sizing of multiple distributed generation and battery swapping stations using grasshopper optimizer algorithm. Energy 2018, 165, 408–421. [Google Scholar] [CrossRef]
- Buja, G.; Bertoluzzo, M.; Fontana, C. Reactive Power Compensation Capabilities of V2G-Enabled Electric Vehicles. IEEE Trans. Power Electr. 2017, 32, 9447–9459. [Google Scholar] [CrossRef]
- Mortaz, E.; Valenzuela, J. Optimizing the size of a V2G parking deck in a microgrid. Int. J. Electr. Power 2018, 97, 28–39. [Google Scholar] [CrossRef]
- Zhang, Y.; Hepner, G.F. The Dynamic-Time-Warping-based k-means++ clustering and its application in phenoregion delineation. Int. J. Remote Sens. 2017, 38, 1720–1736. [Google Scholar] [CrossRef]
- Vogel, M.A.; Wong, A.K. PFS Clustering Method. IEEE Trans. Pattern Anal. Mach. Intell. 1979, 1, 237–245. [Google Scholar] [CrossRef]
- Evangelopoulos, V.A.; Georgilakis, P.S. Optimal distributed generation placement under uncertainties based on point estimate method embedded genetic algorithm. IET Gener. Transm. Distrib. 2014, 8, 389–400. [Google Scholar] [CrossRef]
- Luo, Z.; Hu, Z.; Song, Y.; Yang, X.; Wu, J. Study on Plug-in Electric Vehicles Charging Load Calculating. Autom. Electr. Power Syst. 2011, 14, 36–42. [Google Scholar]
- Han, X.; Zhao, S.; Wei, Z.; Bai, W. Planning and Overall Economic Evaluation of Photovoltaic-Energy Storage Station Based on Game Theory and Analytic Hierarchy Process. IEEE Access 2019, 7, 110972–110981. [Google Scholar] [CrossRef]
- Collotta, M.; Pau, G.; Maniscalco, V. A Fuzzy Logic Approach by Using Particle Swarm Optimization for Effective Energy Management in IWSNs. IEEE Trans. Ind. Electron. 2017, 64, 9496–9506. [Google Scholar] [CrossRef]
- Baran, M.E.; Wu, F.F. Network reconfiguration in distribution systems for loss reduction and load balancing. IEEE Trans. Power Deliv. 1989, 4, 1401–1407. [Google Scholar] [CrossRef]
- Baran, M.E.; Wu, F.F. Optimal capacitor placement on radial distribution systems. IEEE Trans. Power Deliv. 2002, 4, 725–734. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Electricity Cost Price/(CNY/kWh) | Electricity Sale Price/(CNY/kWh) | Charging Cost of EV/(CNY/kWh) | Discharge Compensation Coefficient/(CNY/kWh) | |
|---|---|---|---|---|
| Peak time | 0.6129 | 1.11 | 1.5 | 2.20 |
| Normal time | 0.4430 | 0.68 | 1.0 | 1.23 |
| Valley time | 0.2189 | 0.35 | 0.75 | 0.35 |
| Contaminant | xs/(kg/MWh) | as/(CNY/kg) | bs/(CNY/kg) |
|---|---|---|---|
| CO2 | 639.2 | 0.01 | 0.02 |
| SO2 | 3.587 | 1.00 | 6.00 |
| NOx | 1.544 | 2.00 | 8.00 |
| Scheme | Optimal Allocation Results | Capacity/kW | |
|---|---|---|---|
| Scheme 1 | DG | 13(10).23(8).31(10).7(7) | 3500 |
| EVCSs | 20(309).4(254).8(288).14(211).29(296) | 1358 | |
| Scheme 2 | DG | 13(10).23(6).31(7).28(7) | 3000 |
| EVCSs | 20(290).4(150).8(387).14(248).29(173) | 1248 | |
| Scheme 3 | DG | 13(8).23(3).31(9).7(1).21(9).28(7) | 3700 |
| EVCSs | 20(327).4(293).8(348).14(202).29(291) | 1461 | |
| Scheme | Scheme 1 | Scheme 2 | Scheme 3 |
|---|---|---|---|
| Comprehensive profit/10,000 CNY | 1199.238 | 1204.678 | 1251.675 |
| Voltage quality/pu | 0.845 | 0.831 | 0.823 |
| System load fluctuation/kW | 504.026 | 530.489 | 662.976 |
| Charging satisfaction of EV/% | 0.911 | 0.840 | 0.866 |
| Comprehensive evaluation indices/pu | 0.933 | 0.897 | 0.899 |
| Scheme | Scheme 1 | Scheme 2 | Scheme 3 |
|---|---|---|---|
| Electricity sale benefits/10,000 CNY | 1514.417 | 1514.417 | 1514.417 |
| Charging station sales revenue/10,000 CNY | 550.484 | 603.089 | 668.442 |
| Electricity purchasing cost/10,000 CNY | 587.752 | 648.469 | 658.807 |
| Investment and construction cost/10,000 CNY | 422.985 | 388.860 | 433.661 |
| Maintenance cost/10,000 CNY | 47.442 | 41.756 | 41.501 |
| Government subsidy benefits/10,000 CNY | 144.806 | 130.280 | 167.040 |
| System network loss cost/10,000 CNY | 38.979 | 40.556 | 42.882 |
| Environmental benefits/10,000 CNY | 86.689 | 76.533 | 78.627 |
| Scheme | Scheme 1 | Scheme 2 | Scheme 3 |
|---|---|---|---|
| Charging completion of EV/% | 86.162 | 80.139 | 88.299 |
| Unit charging cost of EV/(CNY/kWh) | 1.060 | 1.155 | 1.171 |
| Scheme | Scheme 1 | Scheme 2 | Scheme 3 |
|---|---|---|---|
| Consumption of DG/MWh | 12,067 | 10,537 | 10,656 |
| Total acceptance of charging load/MWh | 5612 | 5220 | 5751 |
| Scheme | Optimal Allocation Results | Capacity/kW | |
|---|---|---|---|
| Scheme 1 | DG | 10(9).33(2).38(10).21(1).50(5).66(4) | 3100 |
| EVCSs | 14(259).31(237).40(257).45(258).61(299) | 1310 | |
| Scheme 2 | DG | 10(6).33(2).38(10).21(3).50(10) | 3100 |
| EVCSs | 14(232).31(187).40(245).45(150).61(242) | 1056 | |
| Scheme 3 | DG | 33(7).38(10).21(8).50(10).66(10) | 4500 |
| EVCSs | 14(442).31(439).40(331).45(308).61(389) | 1909 | |
| Scheme | Scheme 1 | Scheme 2 | Scheme 3 |
|---|---|---|---|
| Comprehensive profit/10,000 CNY | 1147.366 | 1202.422 | 1320.579 |
| Voltage quality/pu | 0.990 | 0.989 | 0.987 |
| System load fluctuation/kW | 492.478 | 524.166 | 866.618 |
| Charging satisfaction of EV/% | 0.904 | 0.829 | 0.870 |
| Comprehensive evaluation indices/pu | 0.905 | 0.880 | 0.886 |
| Function | Algorithm | Best Value | Worst Value | Mean Value |
|---|---|---|---|---|
| f1 | PSO | 3.832 × 10−23 | 2.194 × 10−5 | 2.577 × 10−7 |
| I−HSPSO | 9.001 × 10−24 | 9.168 × 10−8 | 4.258 × 10−9 | |
| f2 | PSO | 0.1795 | 143.274 | 14.165 |
| I−HSPSO | 3.745 × 10−4 | 1.992 × 10−1 | 1.849 × 10−2 | |
| f3 | PSO | 9.368 × 10−13 | 0.009 | 0.004 |
| I−HSPSO | 0 | 0.009 | 6.802 × 10−4 | |
| f4 | PSO | 3.980 | 29.849 | 12.696 |
| I−HSPSO | 3.836 × 10−24 | 9.949 | 3.872 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, L.; Xie, F.; Huang, Z.; Wang, M. Multi-Objective Coordinated Optimal Allocation of DG and EVCSs Based on the V2G Mode. Processes 2021, 9, 18. https://doi.org/10.3390/pr9010018
Liu L, Xie F, Huang Z, Wang M. Multi-Objective Coordinated Optimal Allocation of DG and EVCSs Based on the V2G Mode. Processes. 2021; 9(1):18. https://doi.org/10.3390/pr9010018
Chicago/Turabian StyleLiu, Lijun, Feng Xie, Zonglong Huang, and Mengqi Wang. 2021. "Multi-Objective Coordinated Optimal Allocation of DG and EVCSs Based on the V2G Mode" Processes 9, no. 1: 18. https://doi.org/10.3390/pr9010018
APA StyleLiu, L., Xie, F., Huang, Z., & Wang, M. (2021). Multi-Objective Coordinated Optimal Allocation of DG and EVCSs Based on the V2G Mode. Processes, 9(1), 18. https://doi.org/10.3390/pr9010018