Non-Linear Sliding Mode Controller for Photovoltaic Panels with Maximum Power Point Tracking

 ,
,  ,
, 

Abstract
1. Introduction
2. Related Work/Background
3. System Modeling
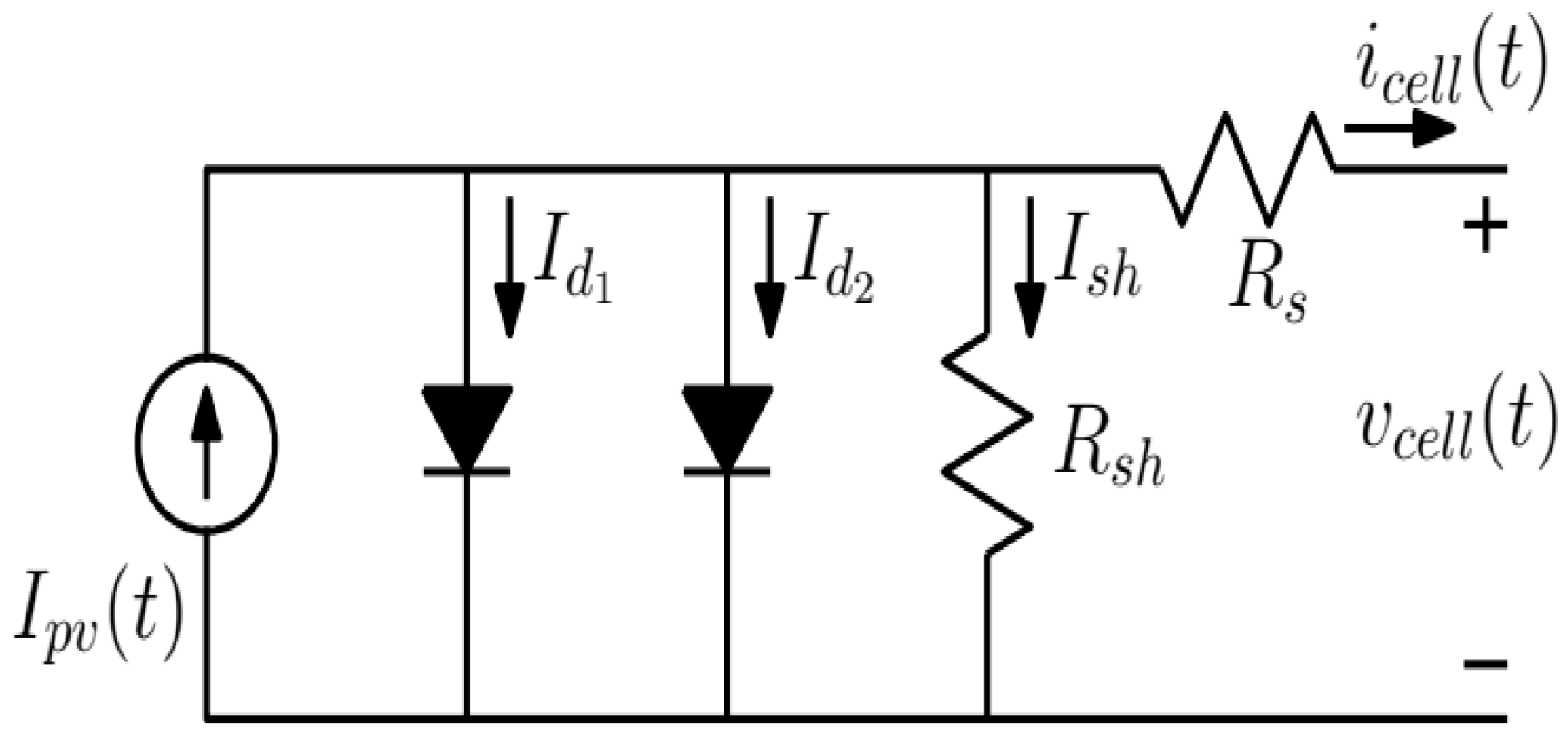
3.1. Photovoltaic (PV) Model
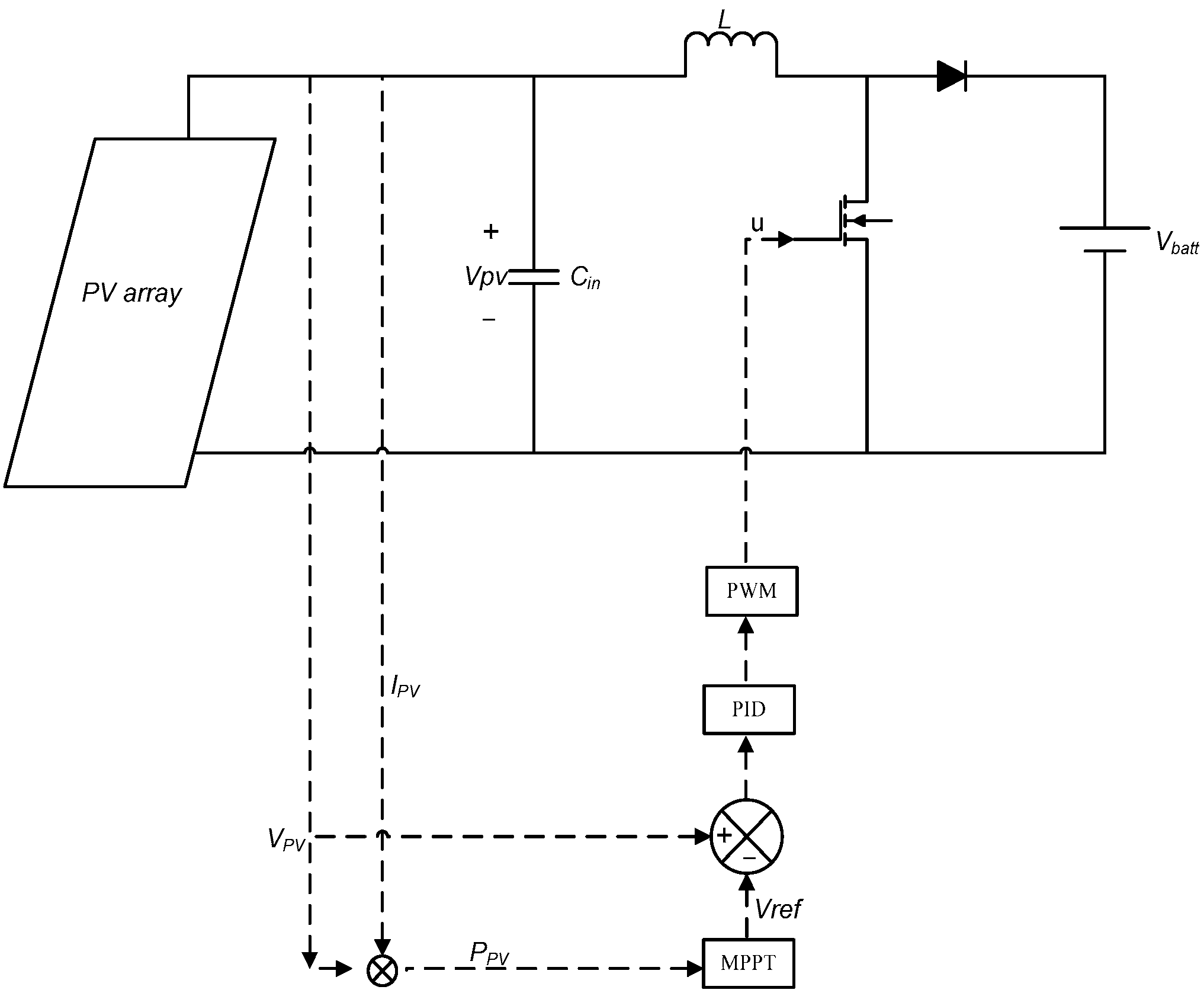
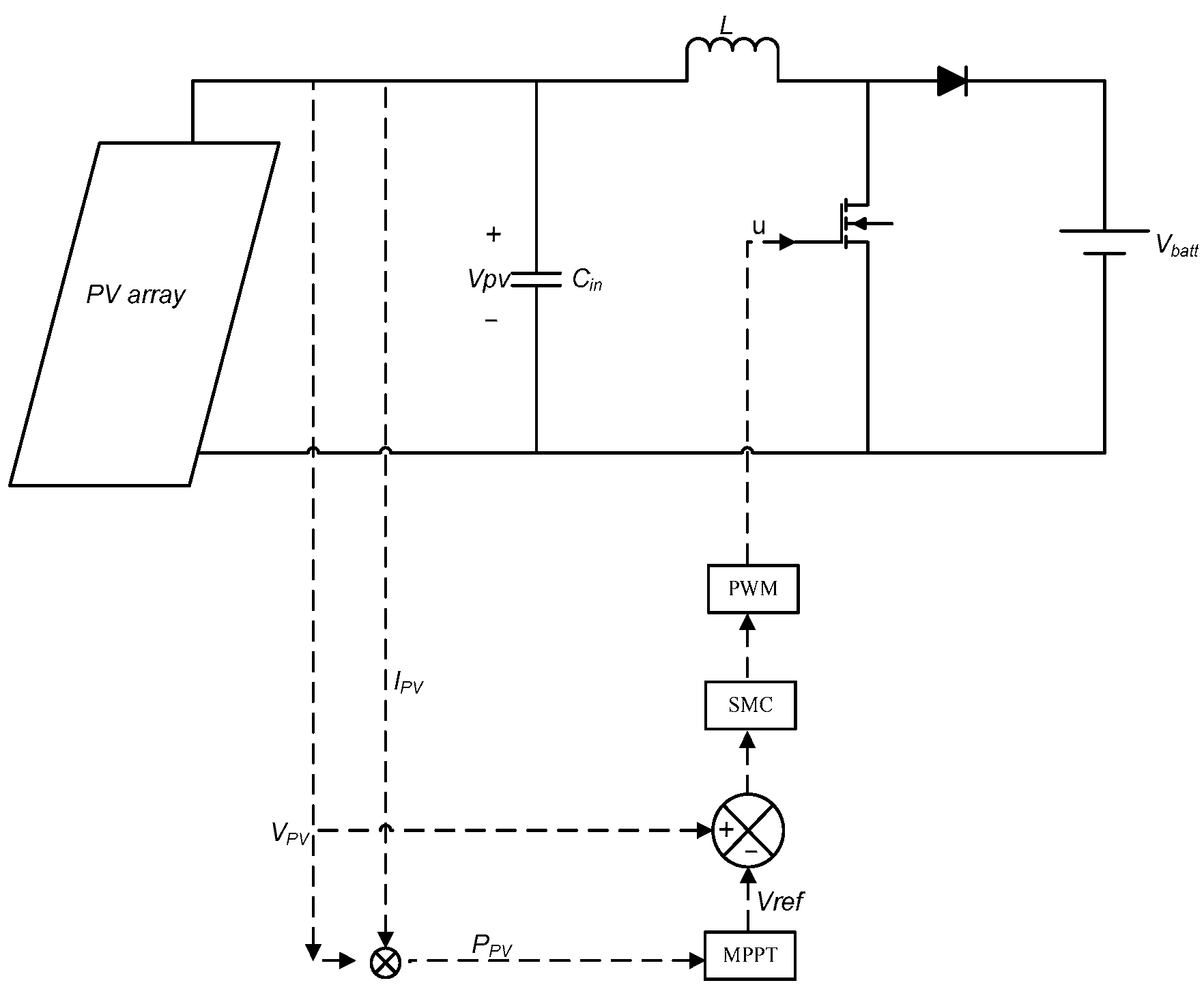
3.2. Control Scheme
3.2.1. DC-DC Converter Model
3.2.2. Controller Formulation
3.2.3. Stability Proof of the Proposed Controller
4. Simulation Results
4.1. Response Using the Proportional Integral Derivative (PID) Controller
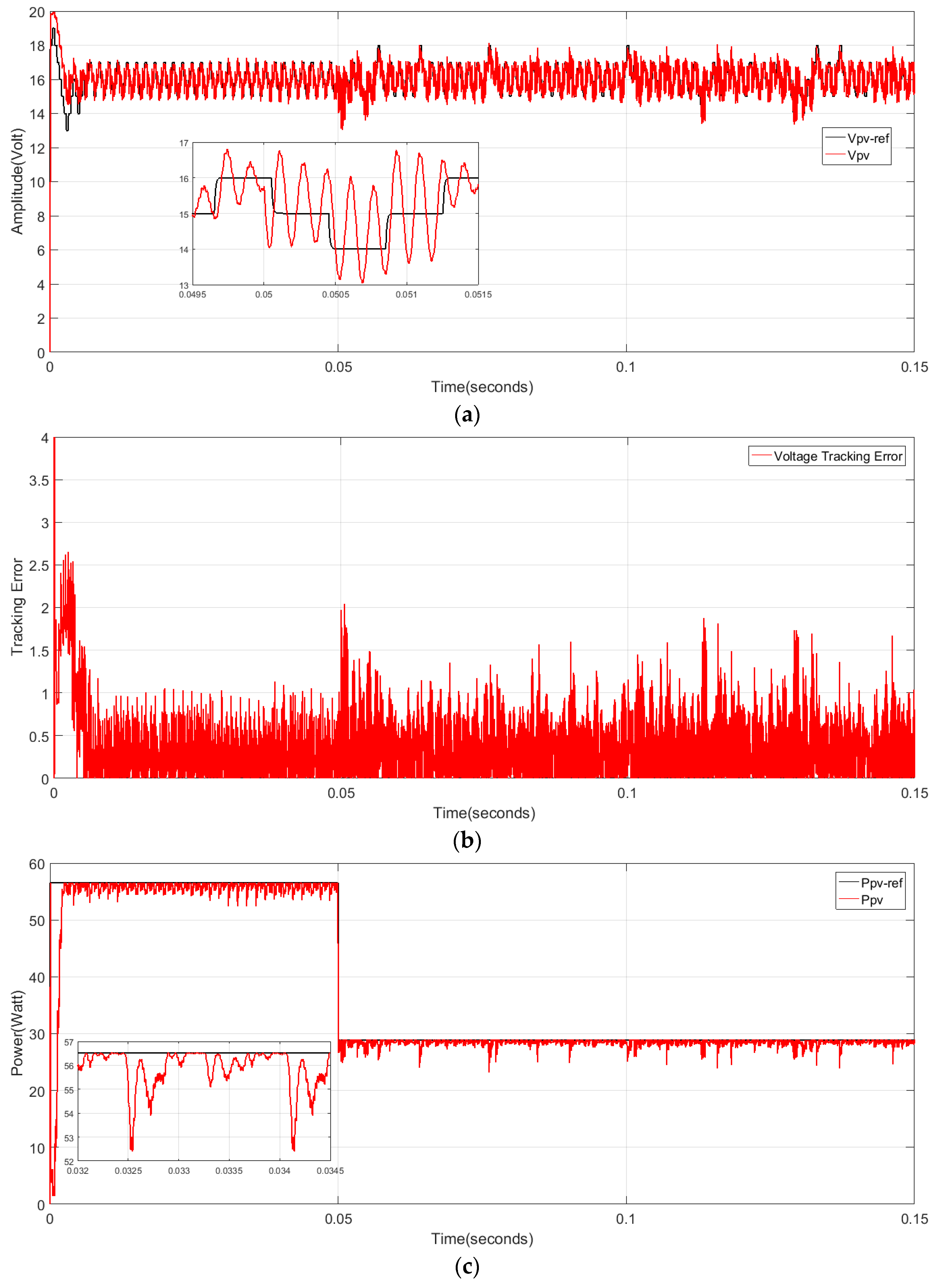
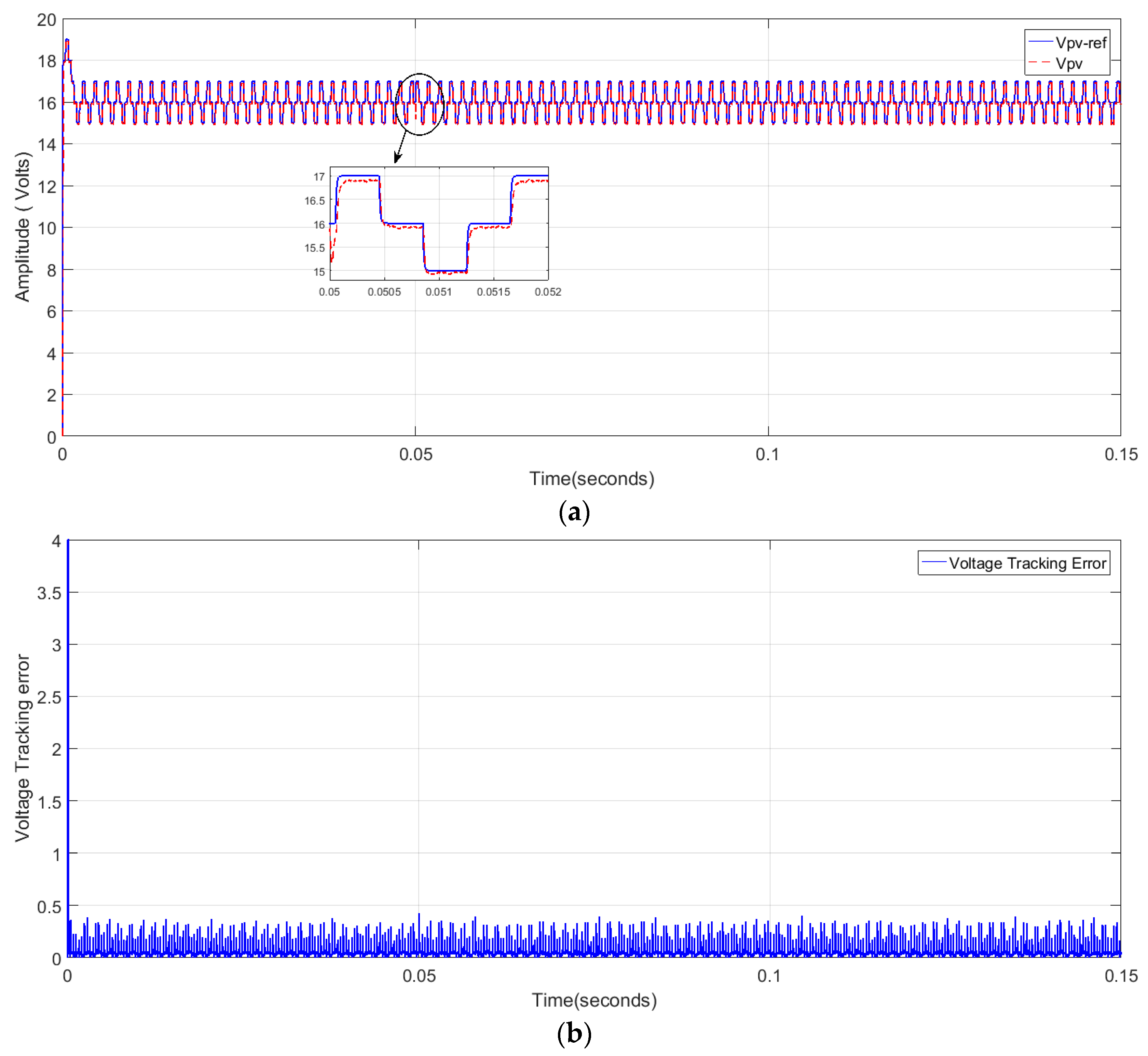
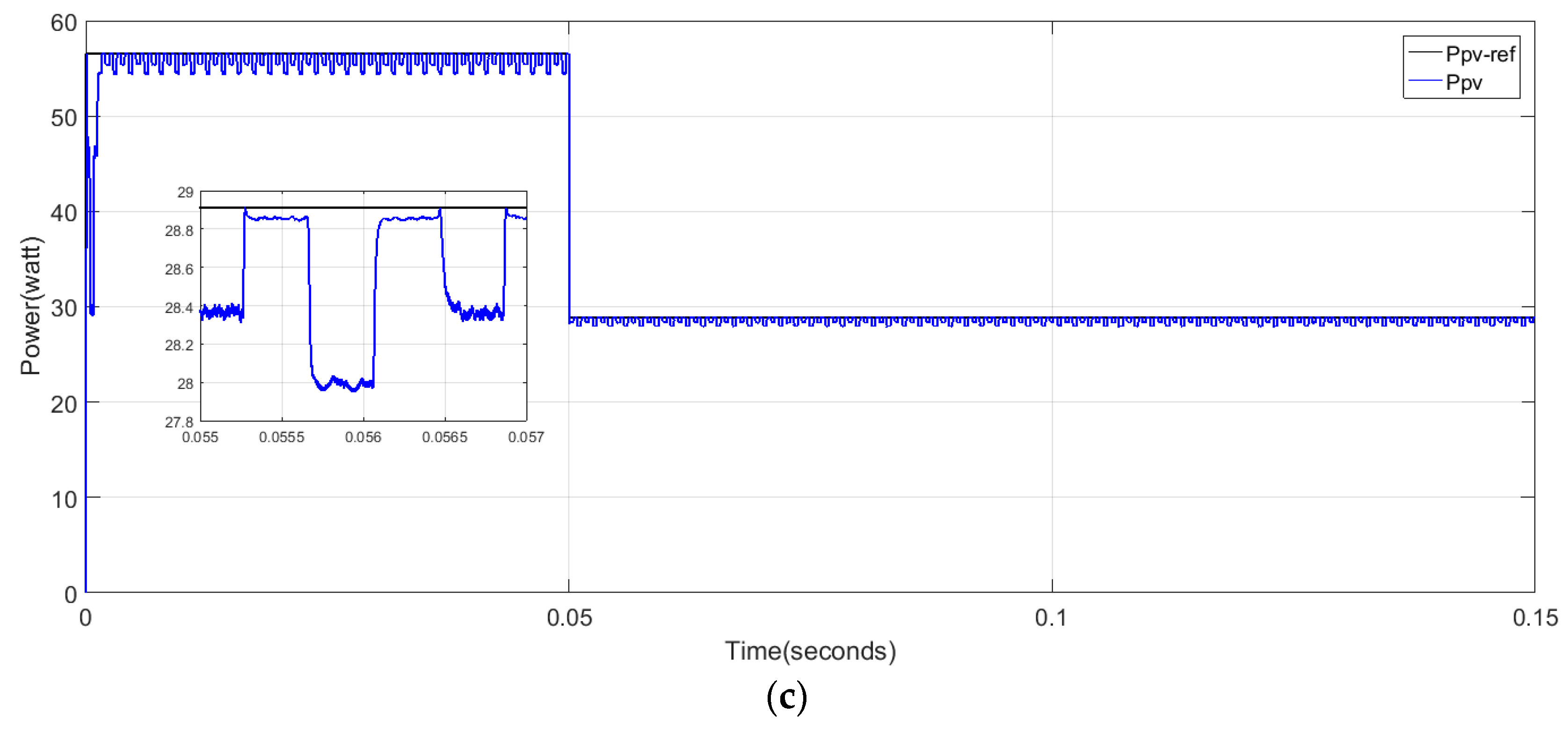
4.2. Response Using the Sliding Mode Controller (SMC)
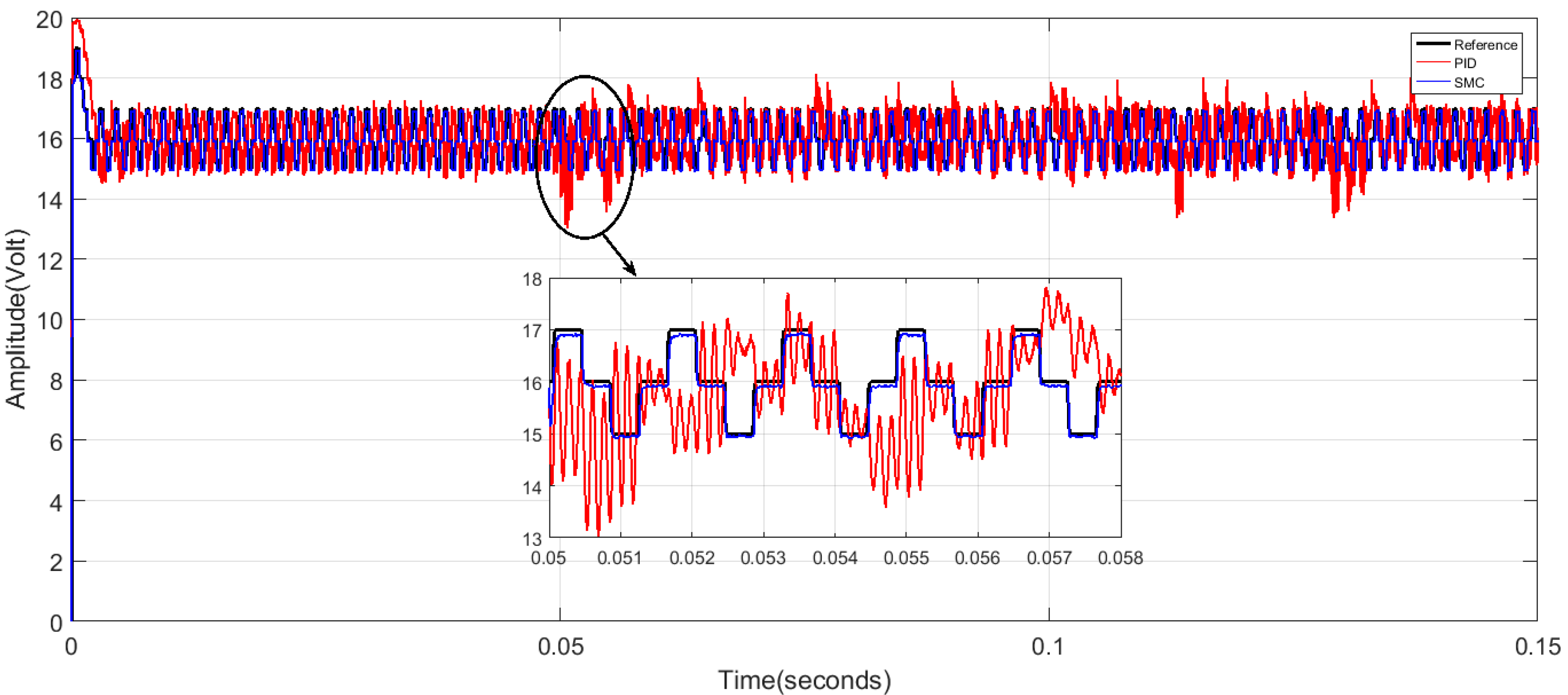
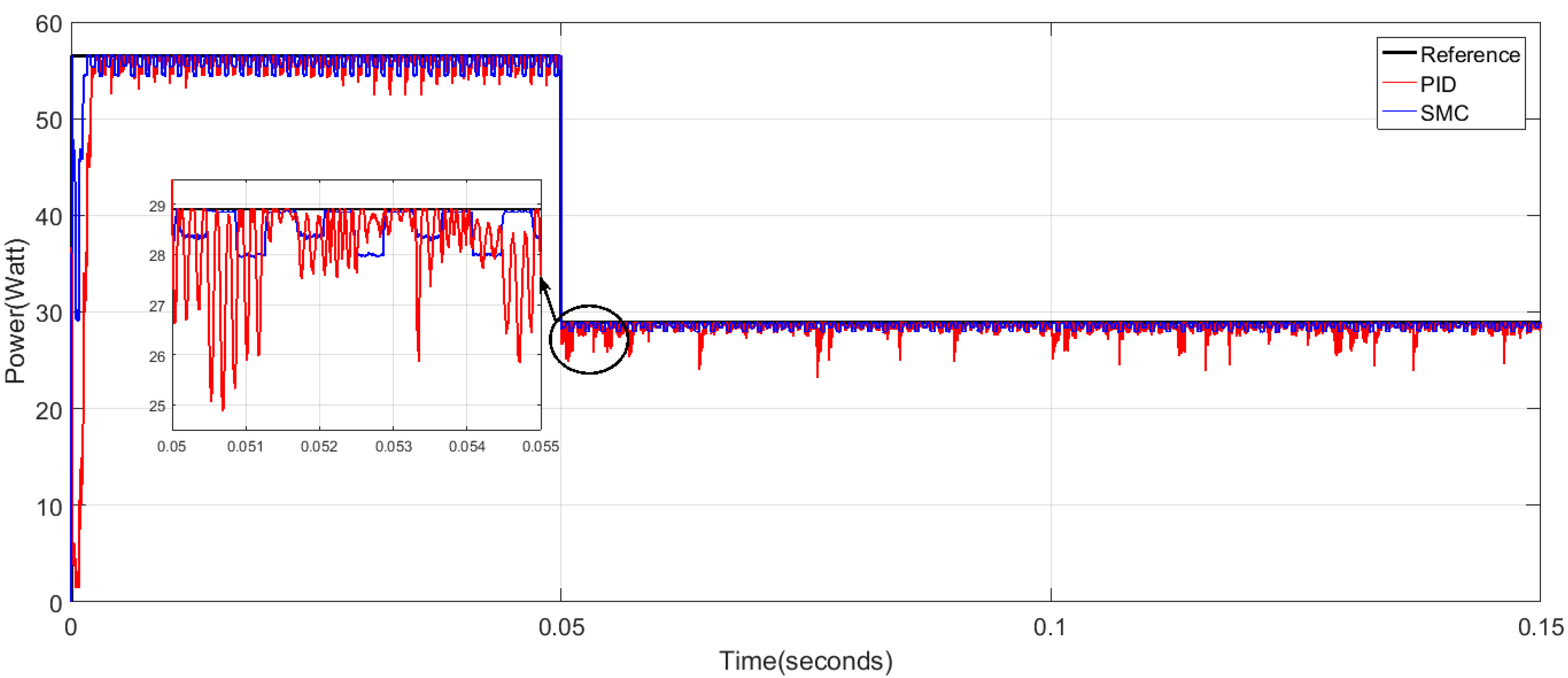
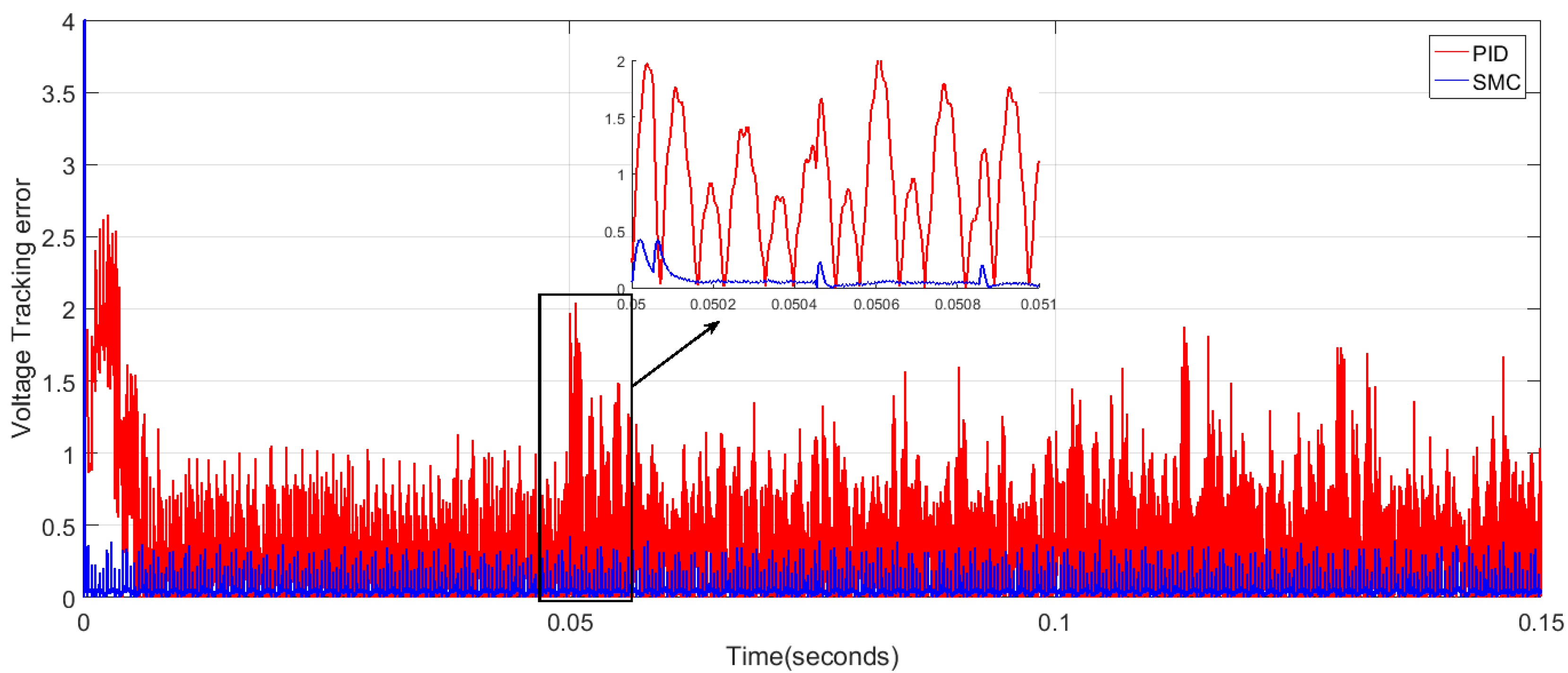
4.3. Comparative Analysis
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ekins, P.; Bradshaw, M.J.; Watson, J. Global Energy: Issues, Potentials, and Policy Implications; Oxford University Press: Londong, UK, 2015. [Google Scholar]
- Growth of Renewable Energy Sources Generating ‘New World’: IRENA: Tüm Kaynaklar. Available online: http://eds.b.ebscohost.com/eds/pdfviewer/pdfviewer?vid=0&sid=3aba38c5-b09f-4638-a936-b90f83885d01%40pdc-v-sessmgr06 (accessed on 11 July 2019).
- Mohammadi, F.; Nazri, G.-A.; Saif, M. A Bidirectional Power Charging Control Strategy for Plug-in Hybrid Electric Vehicles. Sustainability 2019, 11, 4317. [Google Scholar] [CrossRef]
- Sims, R. Energy for Tomorrow’s World—A renewable energy perspective. Renew. Energy World 2000, 3, 24–30. [Google Scholar]
- Bonfiglio, A.; Brignone, M.; Delfino, F.; Procopio, R. Optimal control and operation of grid-connected photovoltaic production units for voltage support n medium-voltage networks. IEEE Trans. Sustain. Energy 2014, 5, 254–263. [Google Scholar] [CrossRef]
- Mehdipour, C.; Mohammadi, F. Design and Analysis of a Stand-Alone Photovoltaic System for Footbridge Lighting. J. Solar Energy Res. (JSER) 2019, 4, 85–91. [Google Scholar]
- Chaibi, Y.; Salhi, M.; El-Jouni, A. Sliding mode controllers for standalone PV systems: Modeling and approach of control. Int. J. Photoenergy 2019, 2019, 5092078. [Google Scholar] [CrossRef]
- Alba-Flores, R.; Lucien, D.; Kirkland, T.; Snowden, L.; Herrin, D. Design and Performance Analysis of three Photovoltaic Systems to Improve Solar Energy Collection. In Proceedings of the IEEE SoutheastCon, St. Petersburg, FL, USA, 19–22 April 2018; pp. 1–4. [Google Scholar]
- Metry, M.; Shadmand, M.B.; Balog, R.S.; Abu-Rub, H. MPPT of Photovoltaic Systems Using Sensorless Current-Based Model Predictive Control. IEEE Trans. Ind. Appl. 2017, 53, 1157–1167. [Google Scholar] [CrossRef]
- de Brito, M.A.G.; Galotto, L.; Sampaio, L.P.; Melo, G.D.; Canesin, C.A. Evaluation of the main MPPT techniques for photovoltaic applications. IEEE Trans. Ind. Electron. 2013, 60, 1156–1167. [Google Scholar] [CrossRef]
- Islam, H.; Mekhilef, S.; Shah, N.B.M.; Soon, T.K.; Seyedmahmousian, M.; Horan, B.; Stojcevski, A. Performance evaluation of maximum power point tracking approaches and photovoltaic systems. Energies 2018, 11, 365. [Google Scholar] [CrossRef]
- Sera, D.; Mathe, L.; Kerekes, T.; Spataru, S.V.; Teodorescu, R. On the perturb-and-observe and incremental conductance mppt methods for PV systems. IEEE J. Photovolt. 2013, 3, 1070–1078. [Google Scholar] [CrossRef]
- Femia, N.; Petrone, G.; Spagnuolo, G. Optimization of perturb and observe maximum power point tracking method. IEEE Trans. Power Electron. 2005, 20, 963–973. [Google Scholar] [CrossRef]
- Piegari, L.; Rizzo, R. Adaptive perturb and observe algorithm for photovoltaic maximum power point tracking. IET Renew. Power Gener. 2010, 4, 317. [Google Scholar] [CrossRef]
- Anto, E.K.; Asumadu, J.A.; Okyere, P.Y. PID control for improving P&O-MPPT performance of a grid-connected solar PV system with Ziegler-Nichols tuning method. In Proceedings of the 2016 IEEE 11th Conference Industrial Electronics and Applications (ICIEA), Hefei, China, 5–7 June 2016; pp. 1847–1852. [Google Scholar]
- Bianconi, E.; Calvente, J.; Giral, R.; Petrone, G.; Ramos-Paja, C.A.; Spagnuolo, G.; Vitelli, M. A fast current-based MPPT technique based on sliding mode control. In Proceedings of the 2011 IEEE International Symposium on Industrial Electronics, Gdansk, Poland, 27–30 June 2011; pp. 59–64. [Google Scholar]
- Khanna, R.; Zhang, Q.; Stanchina, W.E.; Reed, G.F.; Mao, Z.H. Maximum power point tracking using model reference adaptive control. IEEE Trans. Power Electron. 2014, 29, 1490–1499. [Google Scholar] [CrossRef]
- Chavarría, J.; Biel, D.; Guinjoan, F.; Meza, C.; Negroni, J.J. Energy-balance control of PV cascaded multilevel grid-connected inverters under level-shifted and phase-shifted PWMs. IEEE Trans. Ind. Electron. 2013, 60, 98–111. [Google Scholar] [CrossRef]
- Arsalan, M.; Iftikhar, R.; Ahmad, I.; Hasan, A.; Sabahat, K.; Javeria, A. MPPT for photovoltaic system using nonlinear backstepping controller with ntegral action. Sol. Energy 2018, 170, 192–200. [Google Scholar] [CrossRef]
- Iftikhar, R.; Ahmad, I.; Arsalan, M.; Naz, N.; Ali, N.; Armghan, H. MPPT for photovoltaic system using nonlinear controller. Int. J. Photoenergy 2018, 2018, 6979723. [Google Scholar] [CrossRef]
- Al, K.; Khan, L.; Khan, Q.; Ullah, S.; Ahmad, S.; Mumtaz, S.; Karam, F.W.; Naghmas. Robust Integral Backstepping Based Nonlinear MPPT Control for a PV System. Energies 2019, 12, 3180. [Google Scholar] [CrossRef]
- Levron, Y.; Shmilovitz, D. Maximum power point tracking employing sliding mode control. IEEE Trans. Circuits Syst. I Regul. Pap. 2013, 60, 724–732. [Google Scholar] [CrossRef]
- Liu, J. Sliding Mode Control Using MATLAB; Academic Press: Beijing, China, 2017. [Google Scholar]
- Liu, J. Design, Intelligent Control Design and MATLAB Simulation; Springer: Singapore; Beijing, China, 2018. [Google Scholar]
- Tan, S.C.; Lai, Y.M.; Tse, C.K. General design issues of sliding-mode controllers in DC-DC converters. IEEE Trans. Ind. Electron. 2008, 55, 1160–1174. [Google Scholar]
- Montoya, D.G.; Paja, C.A.R.; Giral, R. A new solution of maximum power point tracking based on sliding mode control. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 8350–8355. [Google Scholar]
- Tobón, A.; Peláez-Restrepo, J.; Villegas-Ceballos, J.; Serna-Garcés, S.; Herrera, J.; Ibeas, A. Maximum Power Point Tracking of Photovoltaic Panels by Using Improved Pattern Search Methods. Energies 2017, 10, 1316. [Google Scholar] [CrossRef]
- Montoya, D.G.; Ramos-Paja, C.A.; Gira, R.L. Improved Design of Sliding-Mode Controllers Based on the Requirements of MPPT Techniques. IEEE Trans. Power Electron. 2016, 31, 235–247. [Google Scholar] [CrossRef]
- Attivissimo, F.; di Nisio, A.; Savino, M.; Spadavecchia, M. Uncertainty analysis in photovoltaic cell parameter estimation. IEEE Trans. Instrum. Meas. 2012, 61, 1334–1342. [Google Scholar] [CrossRef]
- Ahmad, T.; Sobhan, S.; Nayan, F. Comparative Analysis between Single Diode and Double Diode Model of PV Cell: Concentrate Different Parameters Effect on Its Efficiency. JPEE 2016, 4, 31–46. [Google Scholar] [CrossRef]
- Cuk, S.; Middlebrook, R.D. Advances in Switched-Mode Power Conversion Part II. IEEE Trans. Ind. Electron. 1983, IE-30, 19–29. [Google Scholar] [CrossRef]
- Tutorial, P. How to Use Solar Module Physical Model. Available online: https://powersimtech.com/drive/uploads/2016/04/Tutorial-Solar-Module-physical-model.pdf (accessed on 1 April 2016).
- SOLAREX. MSX-60 and MSX-64 Photovoltaic Modules; SOLAREX: Frederick, MD, USA, 1997; pp. 347–368. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value |
|---|---|---|
| Isc | Open circuit current | 3.8 A |
| Voc | Open circuit voltage | 21.1 V |
| Imp | Maximum panel current | 3.5 A |
| Vmp | Maximum panel voltage | 17.1 V |
| Is1 = s2 | Saturation currents | 4.704 × 10−10 |
| Ipv | Panel current | 3.8 A |
| Rsh | Shunt resistance | 176.4 Ω |
| Rs | Series resistance | 0.35 Ω |
| Parameter | Value |
|---|---|
| L | 22 µF |
| C | 100 µF |
| Vo | 24 V |
| fsho | 49.9 kHz |
| Kp | 0.1 |
| Kd | 0.1 |
| Ki | 50 |
| Ks (MPPT) | 14.53 |
| Ta | 400 µs |
| ΔVo | IV (P and O) |
| LPF | 20 kHz |
| Controller | Over/Undershoot (%) | Settling Time (s) | Power Losses (Watt) |
|---|---|---|---|
| PID | 2.61 | 5 ms | 3 |
| SMC | 0.6 | 0.3 ms | 0.68 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gohar Ali, H.; Vilanova Arbos, R.; Herrera, J.; Tobón, A.; Peláez-Restrepo, J. Non-Linear Sliding Mode Controller for Photovoltaic Panels with Maximum Power Point Tracking. Processes 2020, 8, 108. https://doi.org/10.3390/pr8010108
Gohar Ali H, Vilanova Arbos R, Herrera J, Tobón A, Peláez-Restrepo J. Non-Linear Sliding Mode Controller for Photovoltaic Panels with Maximum Power Point Tracking. Processes. 2020; 8(1):108. https://doi.org/10.3390/pr8010108
Chicago/Turabian StyleGohar Ali, Hina, Ramon Vilanova Arbos, Jorge Herrera, Andrés Tobón, and Julián Peláez-Restrepo. 2020. "Non-Linear Sliding Mode Controller for Photovoltaic Panels with Maximum Power Point Tracking" Processes 8, no. 1: 108. https://doi.org/10.3390/pr8010108
APA StyleGohar Ali, H., Vilanova Arbos, R., Herrera, J., Tobón, A., & Peláez-Restrepo, J. (2020). Non-Linear Sliding Mode Controller for Photovoltaic Panels with Maximum Power Point Tracking. Processes, 8(1), 108. https://doi.org/10.3390/pr8010108