Unsteady Flow Process in Mixed Waterjet Propulsion Pumps with Nozzle Based on Computational Fluid Dynamics




Abstract
1. Introduction
2. Numerical Simulation Method
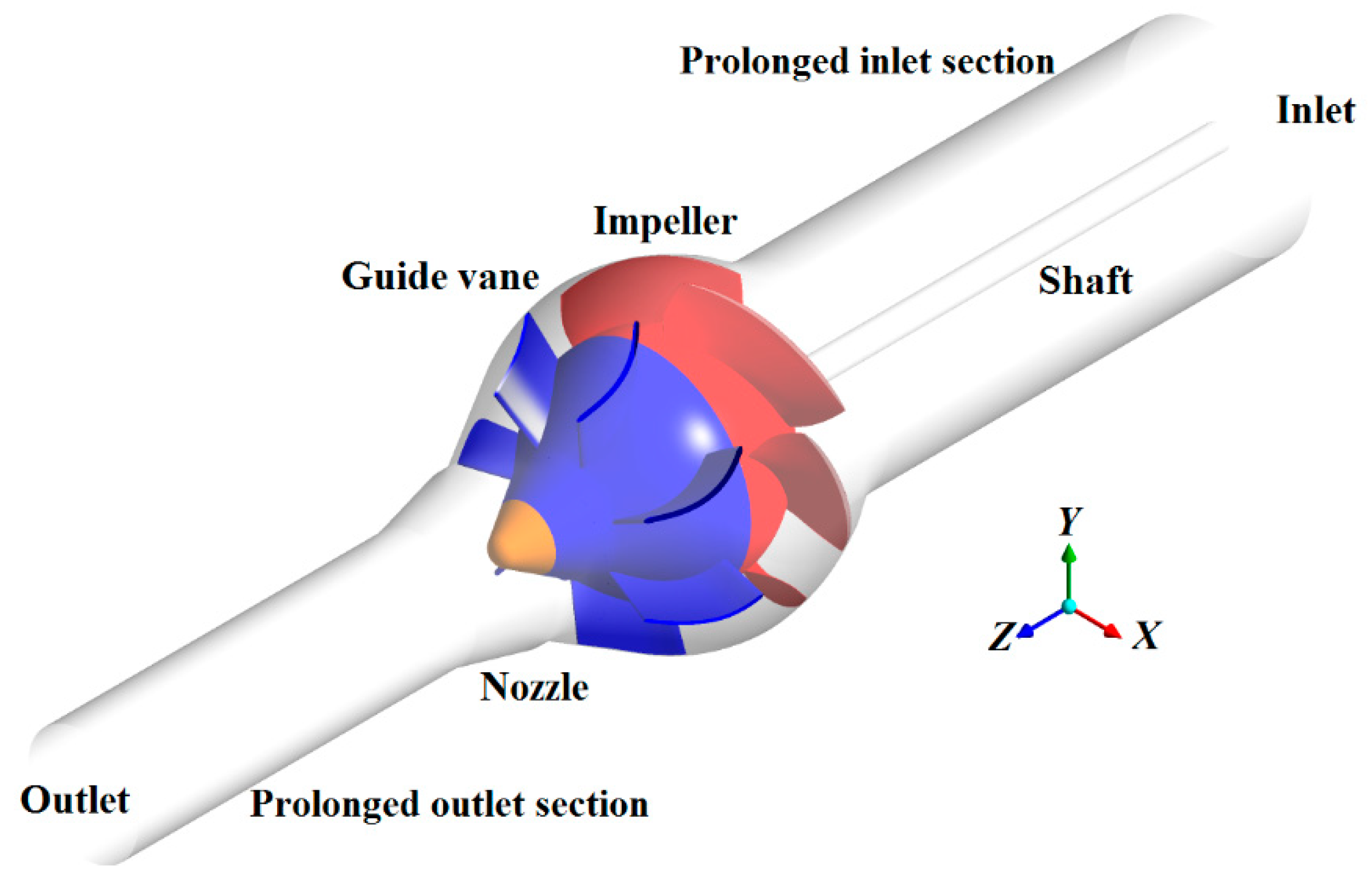
2.1. Geometry Model
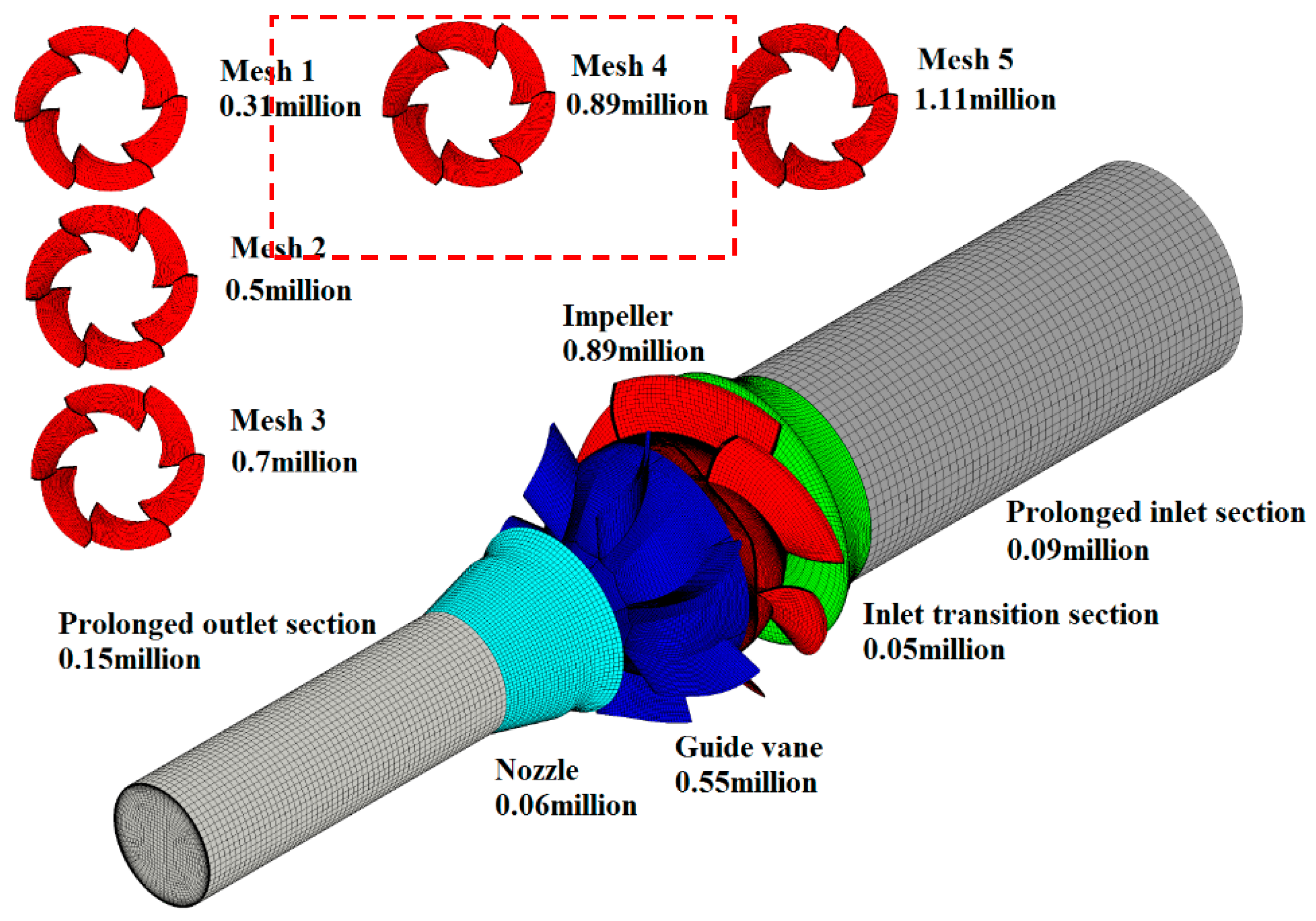
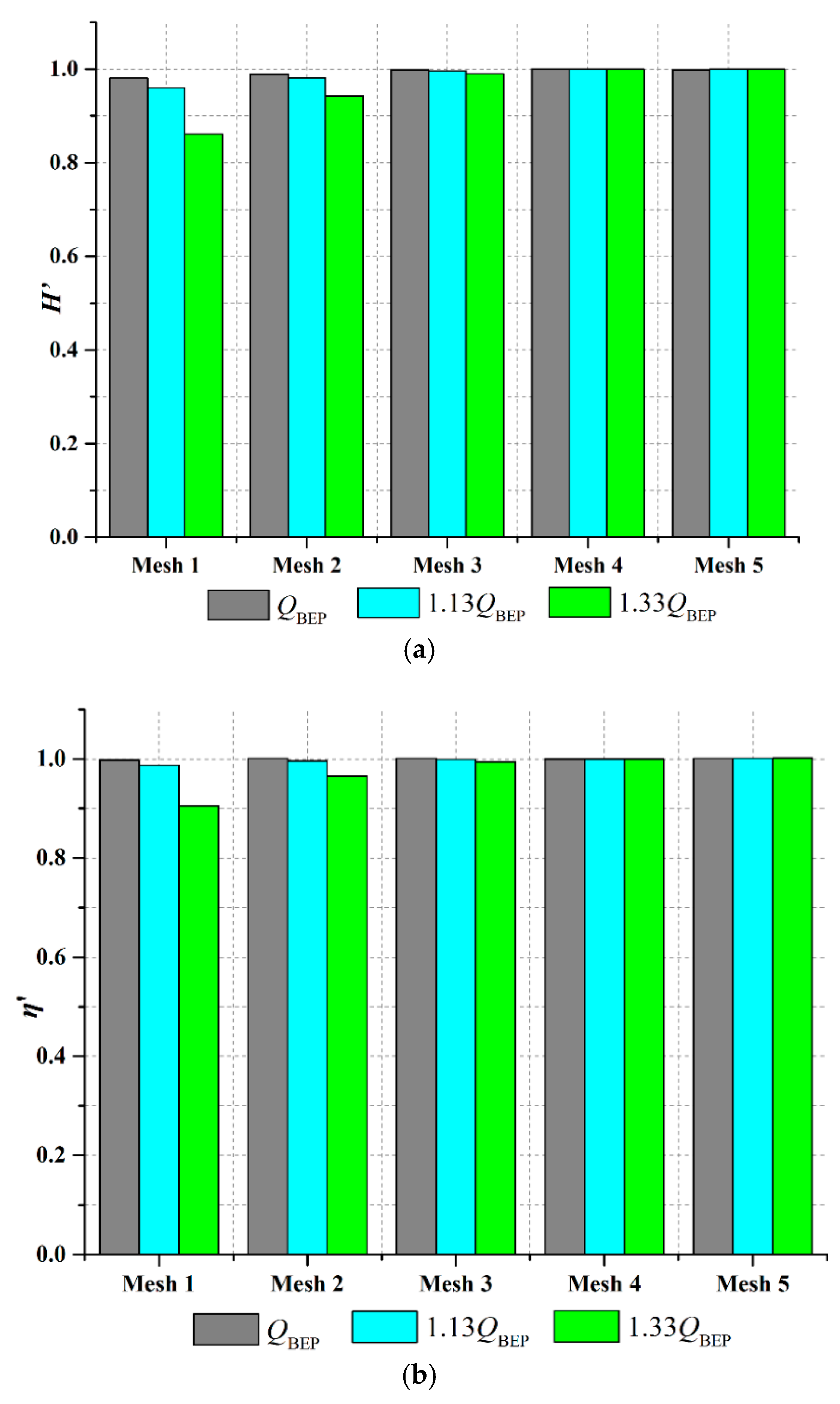
2.2. Mesh Generation and Independence Analysis
2.3. Numerical Methodolgy and Boundary Conditions
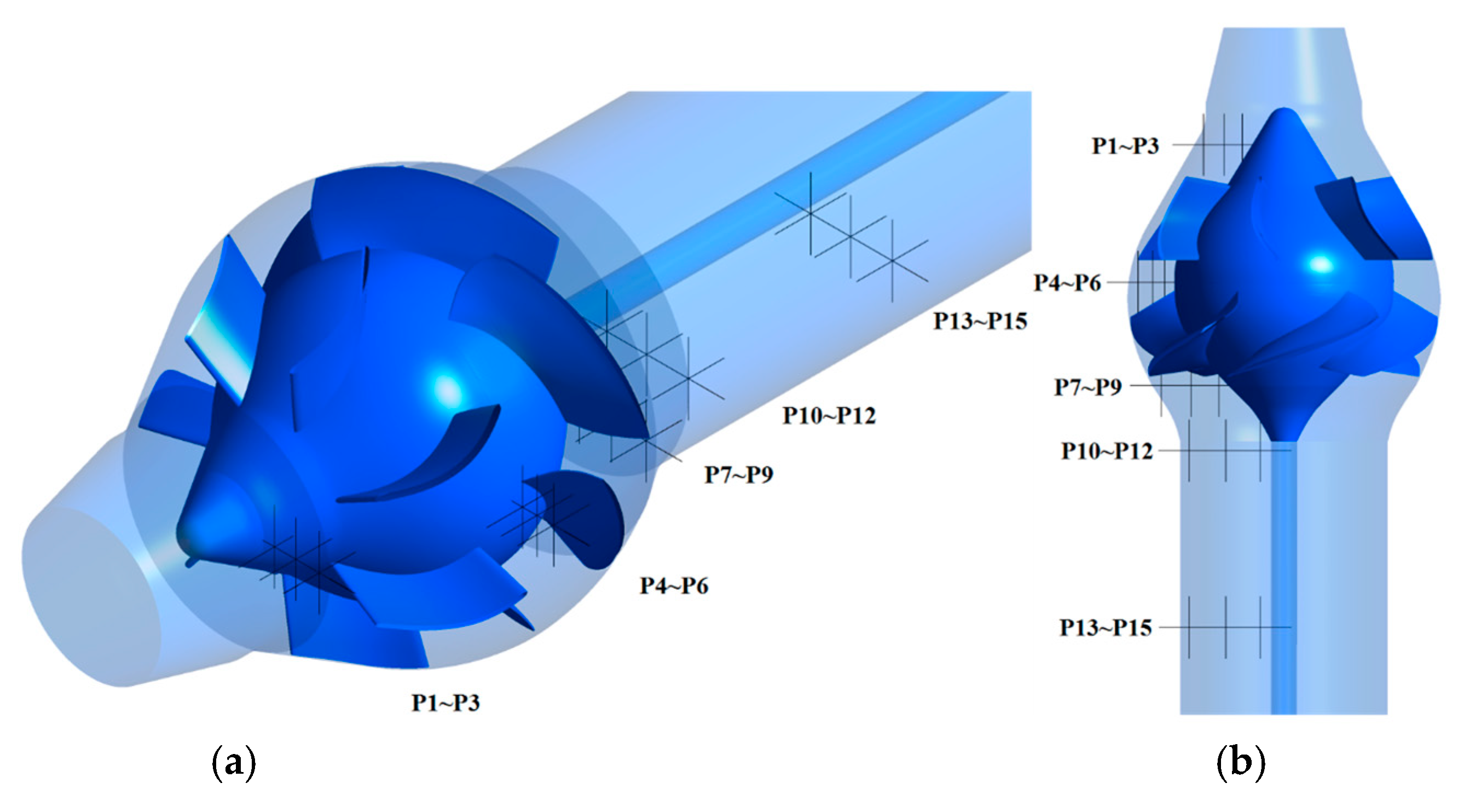
2.4. Pressure Pulsation Monitoring Probe Arrangement
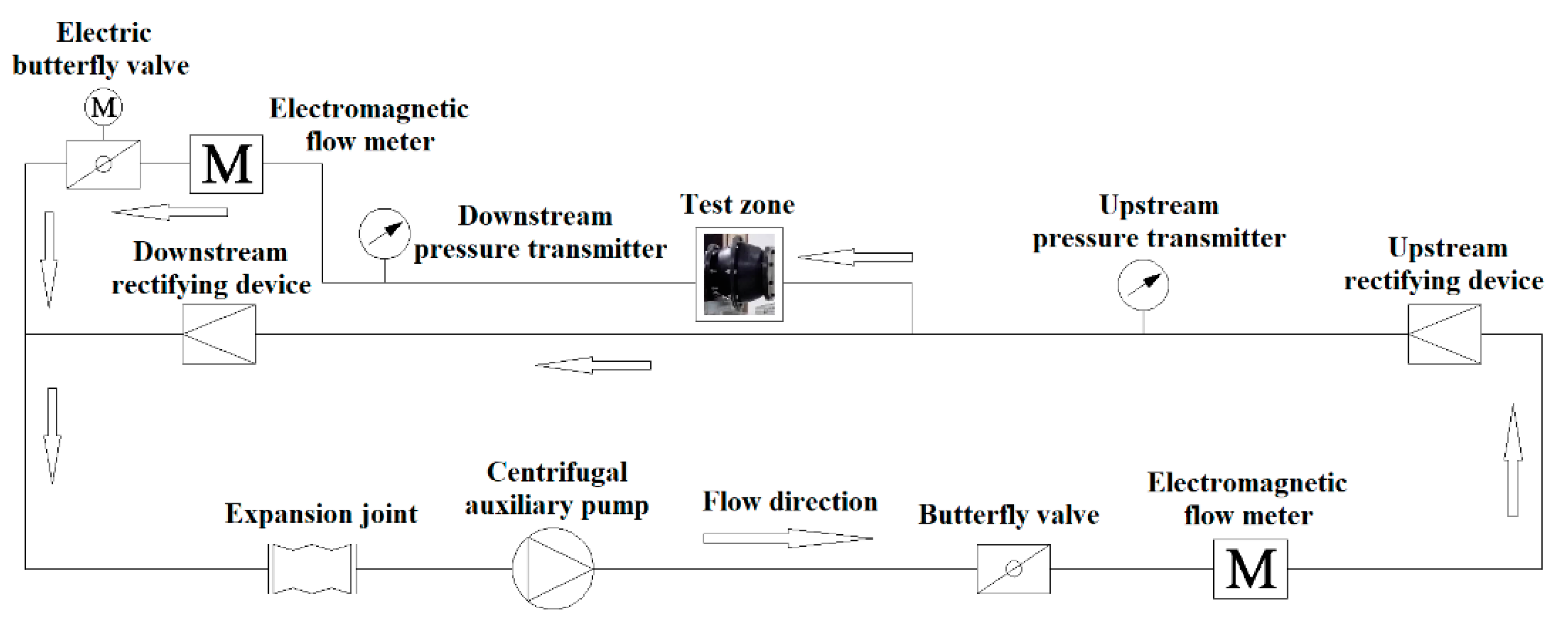
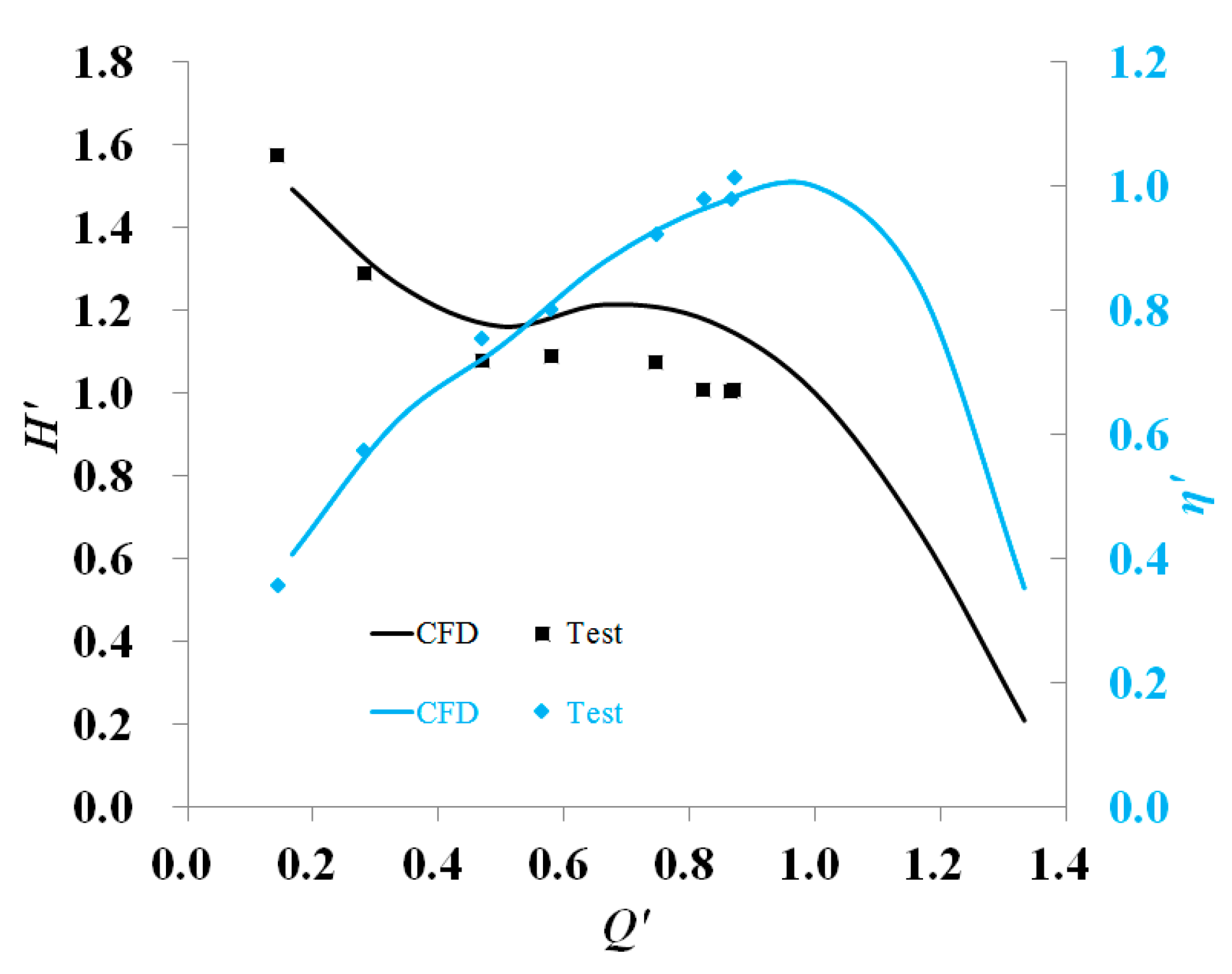
3. Test Arrangement and Verification
4. Results
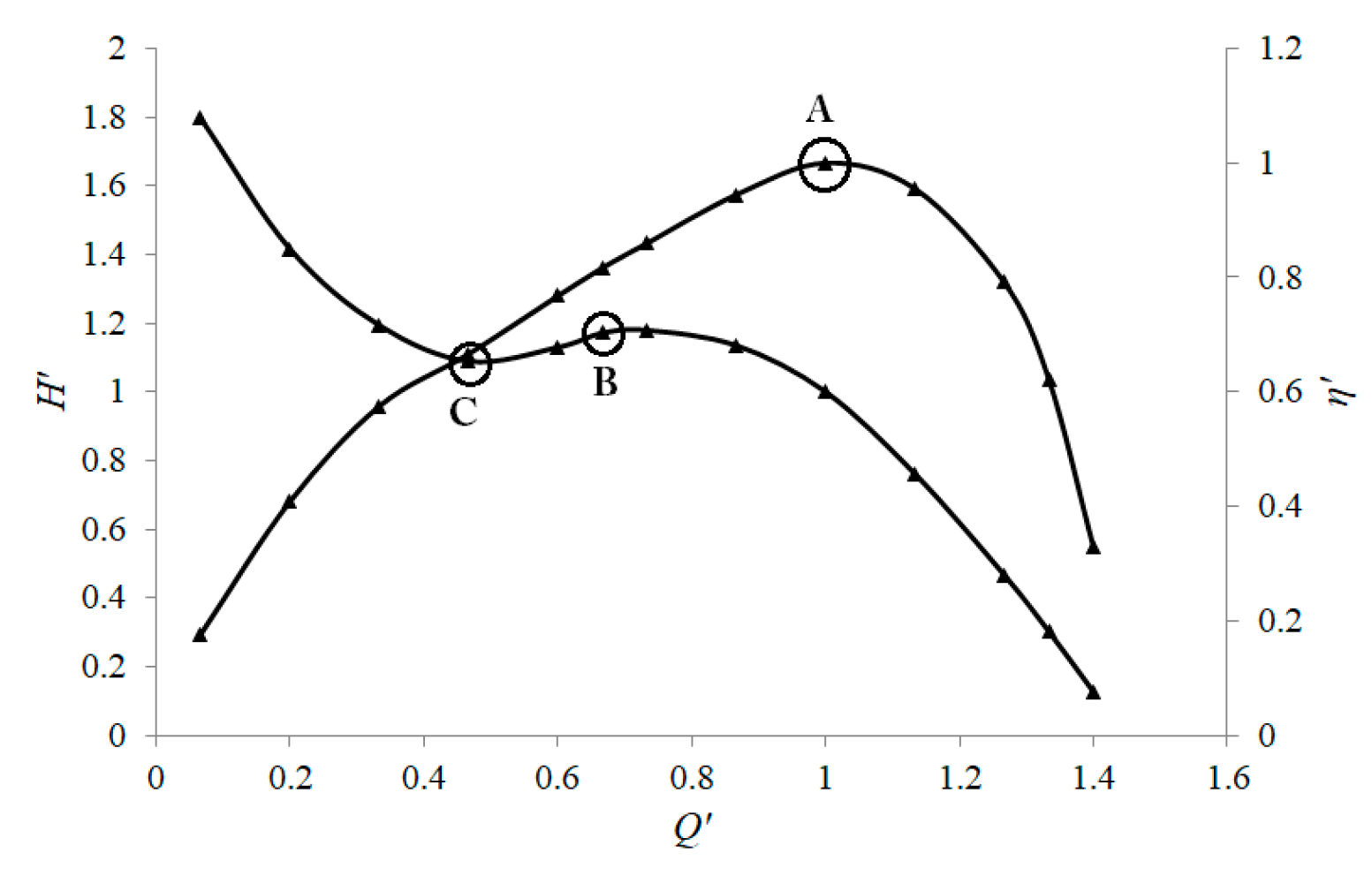
4.1. Hydraulic Performance Curve
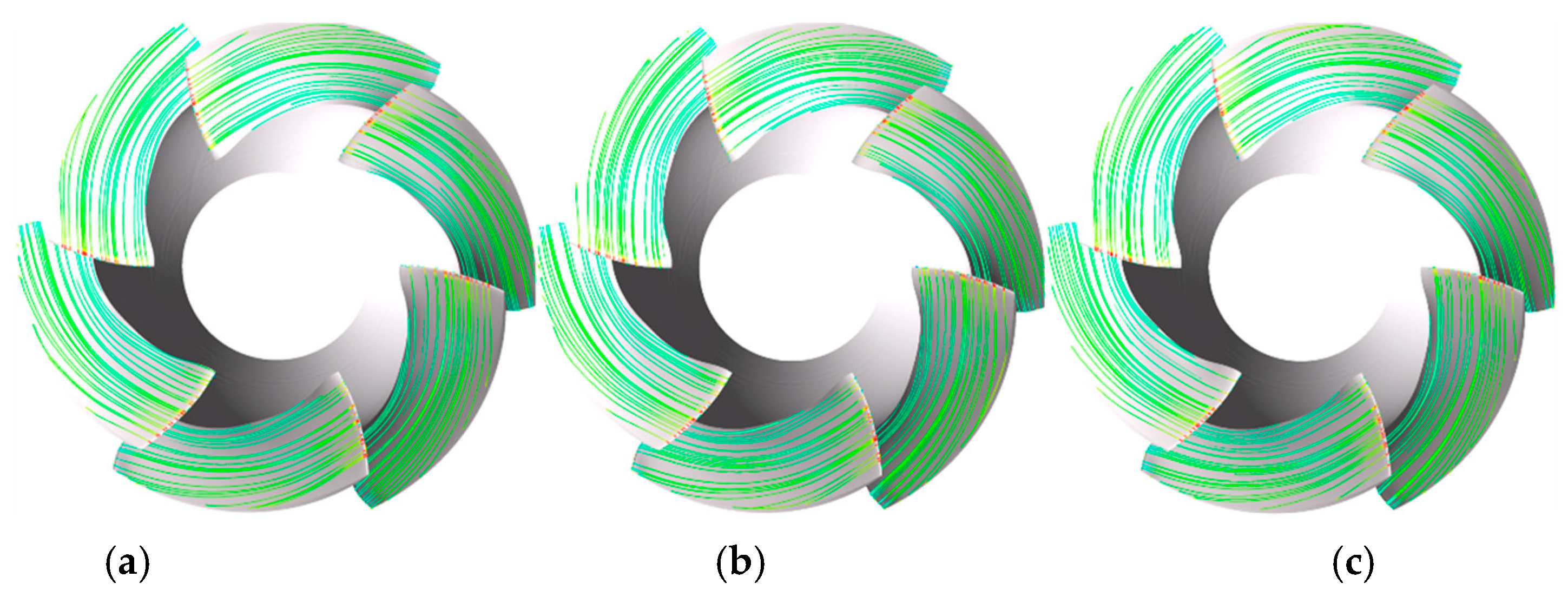
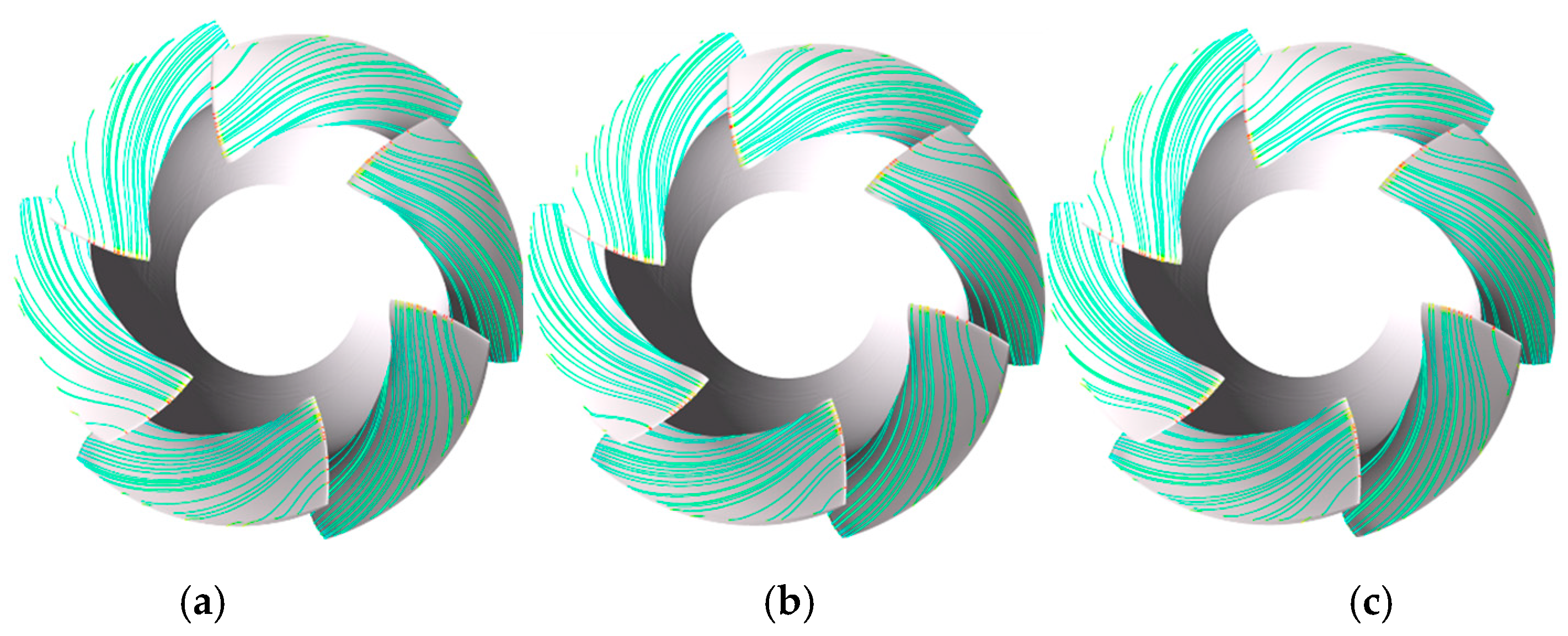
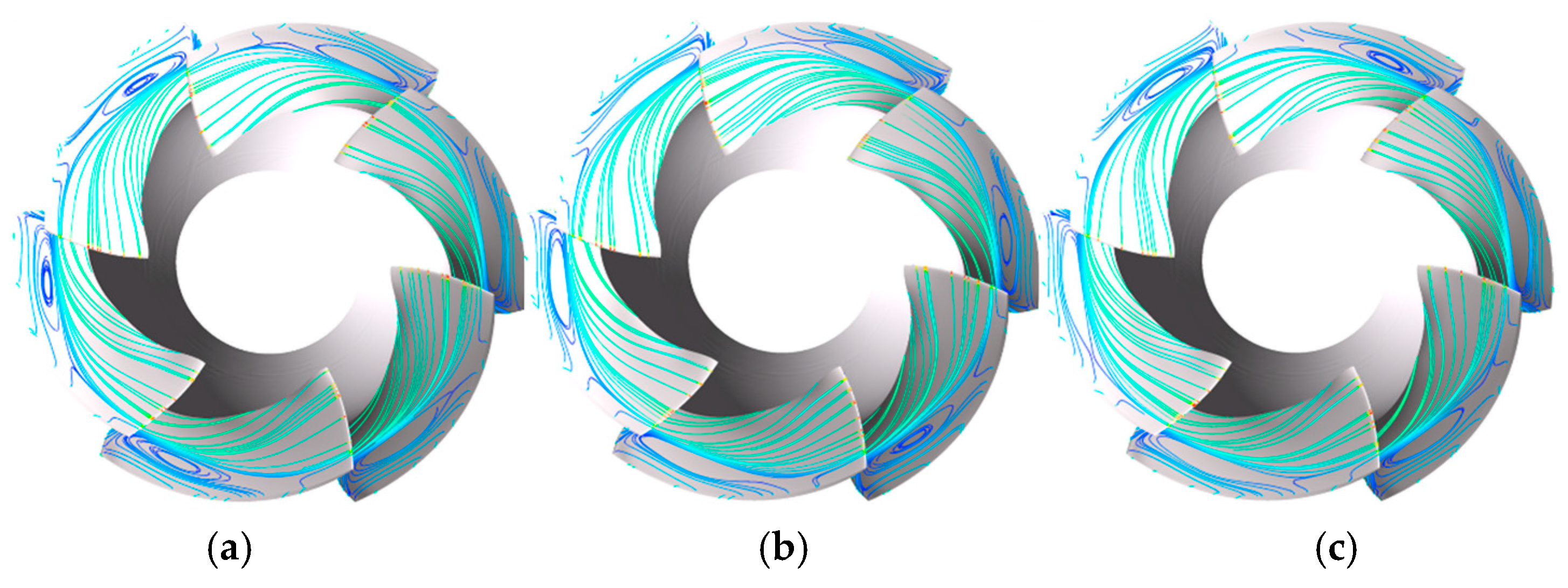
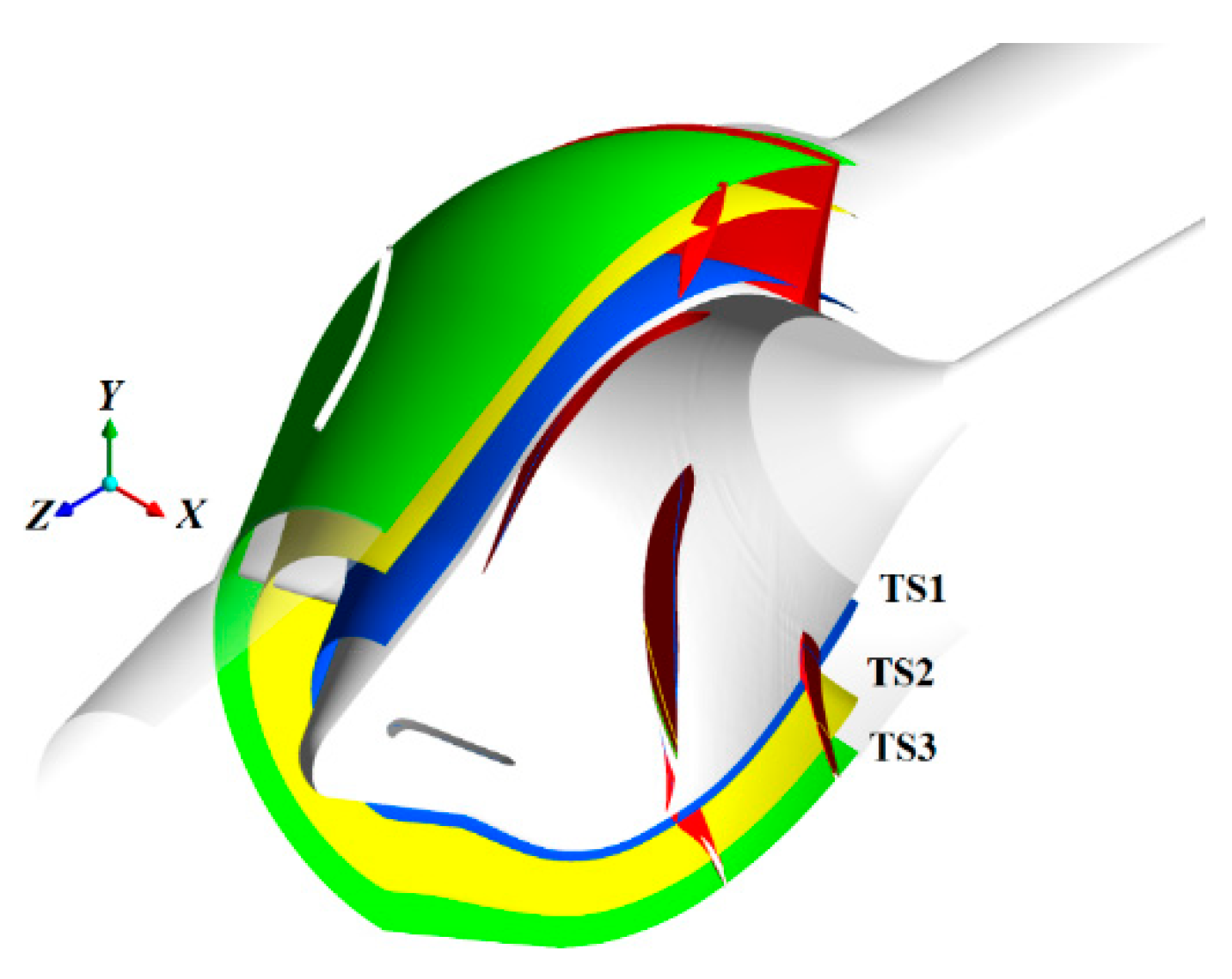
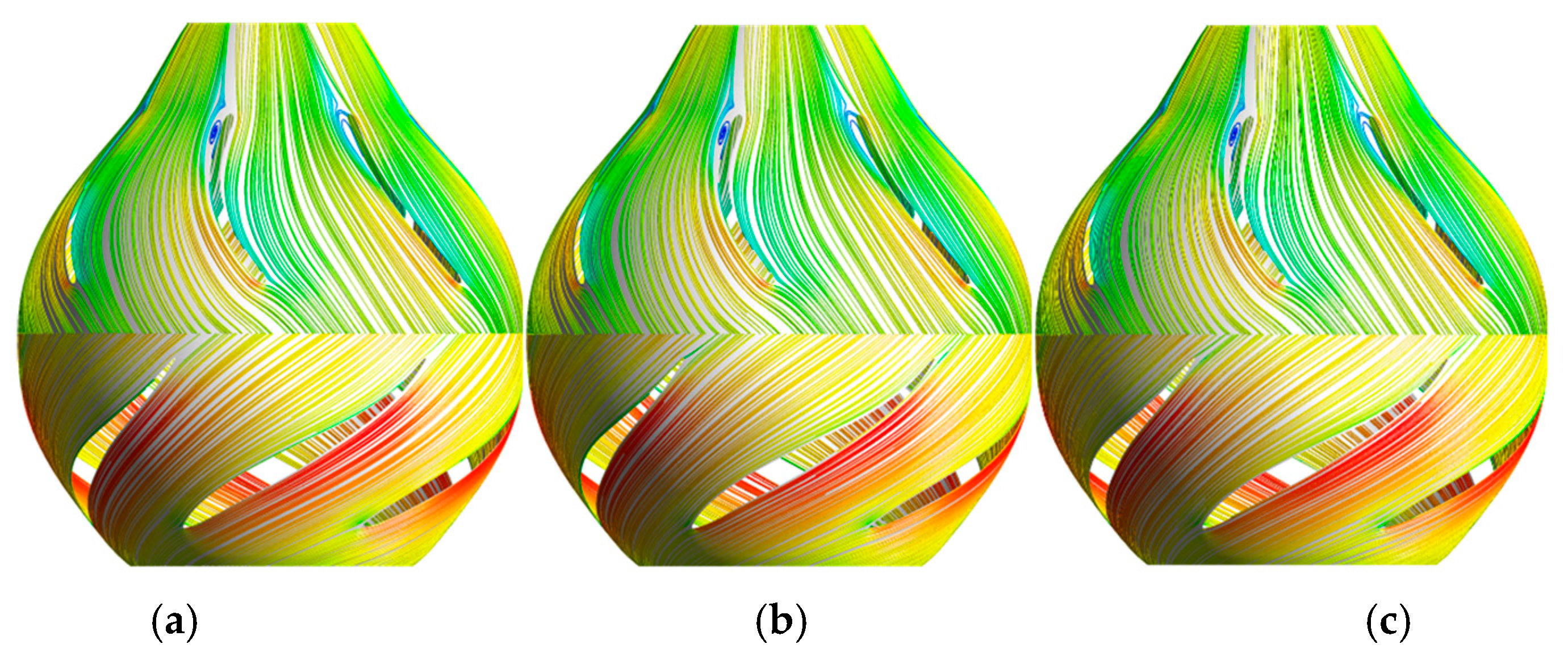
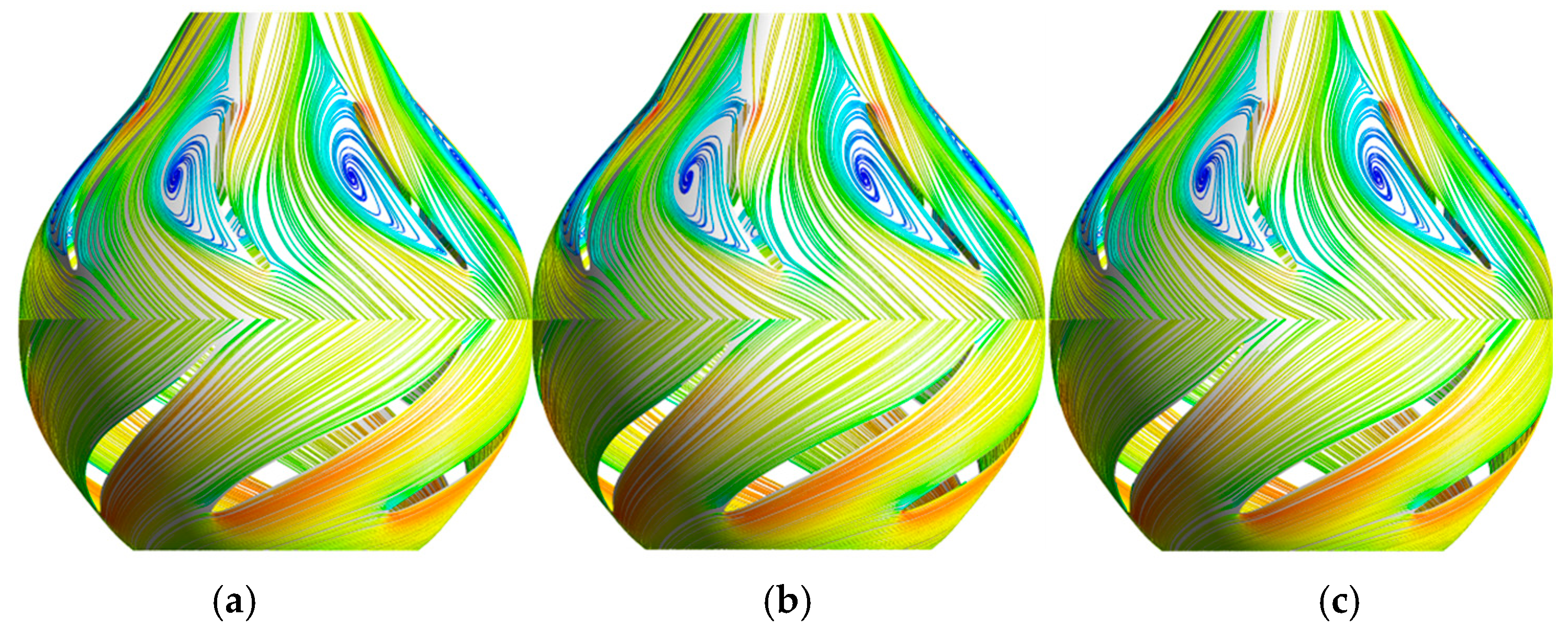
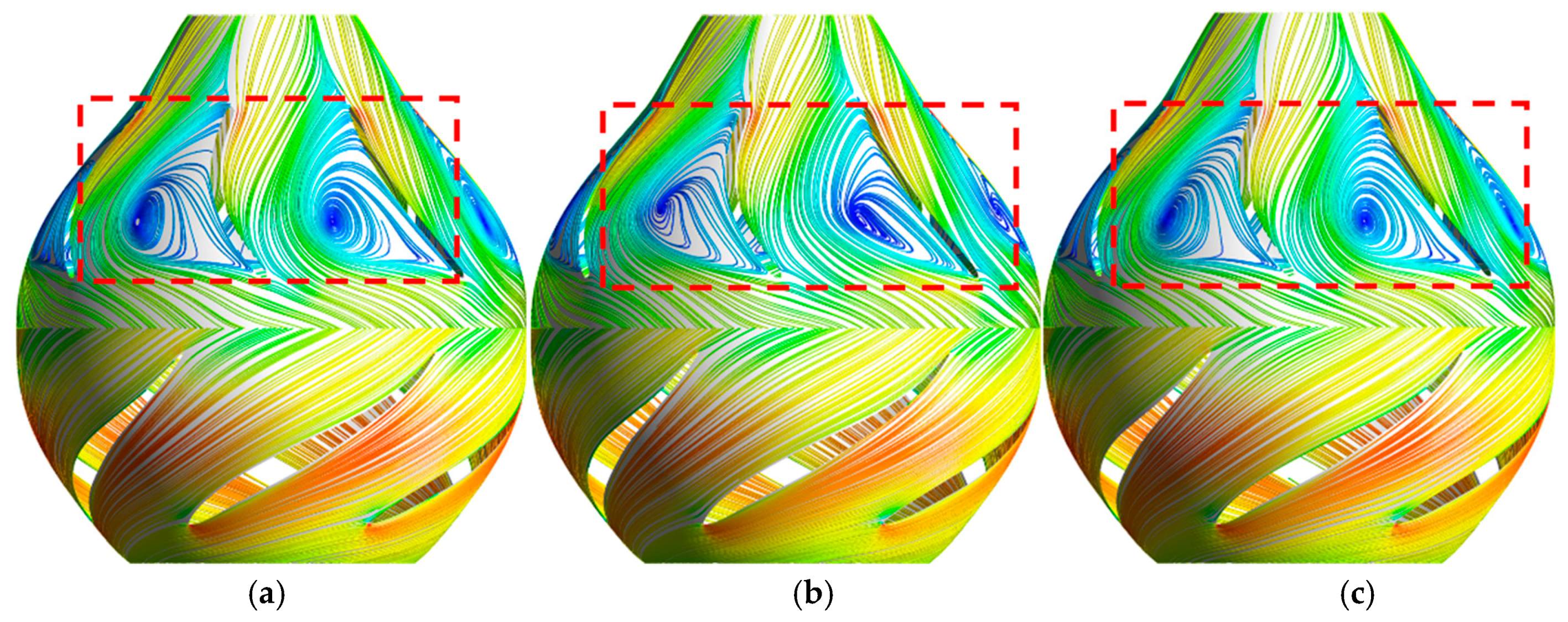
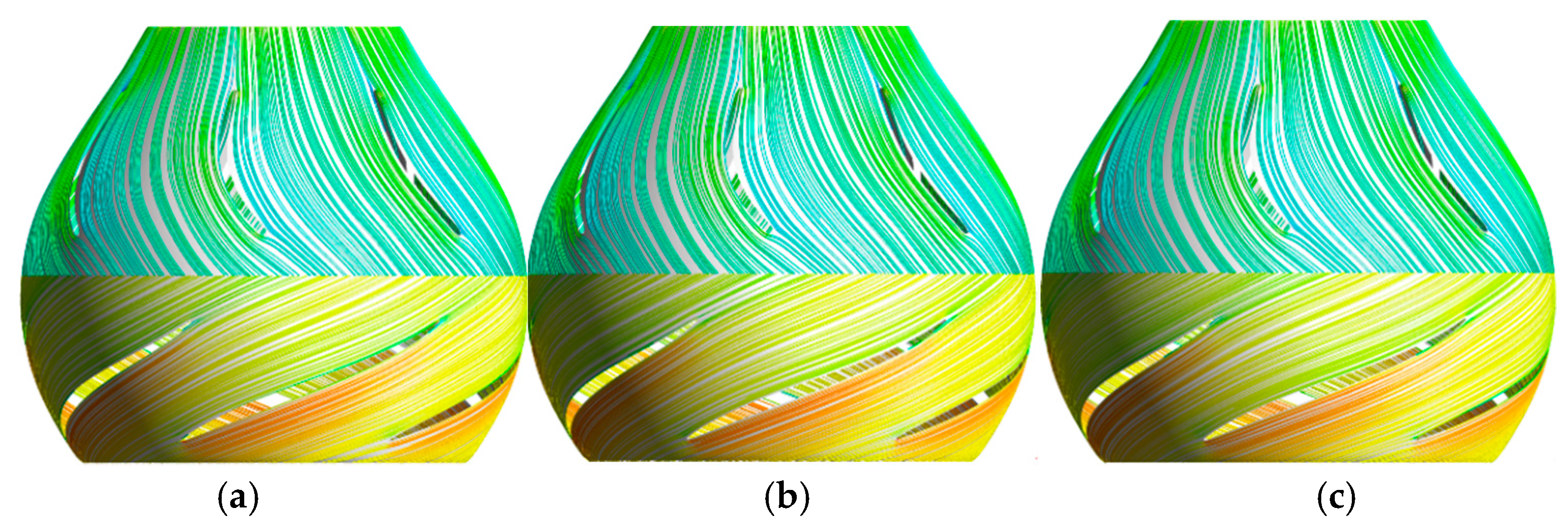
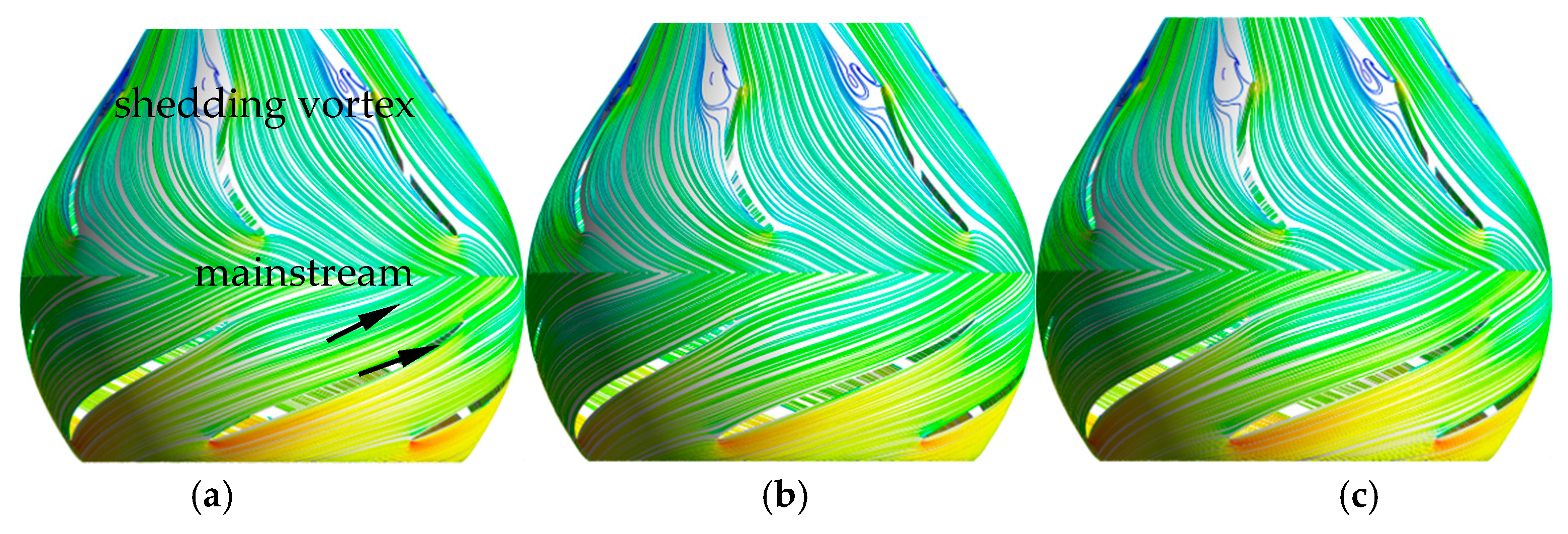
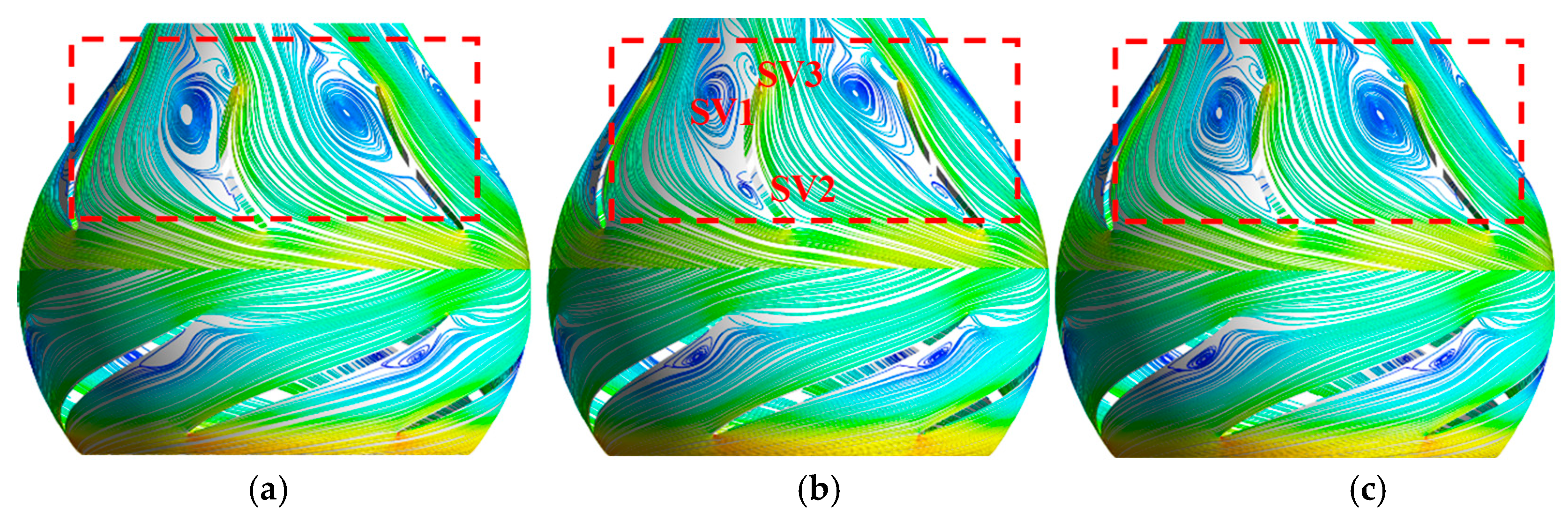
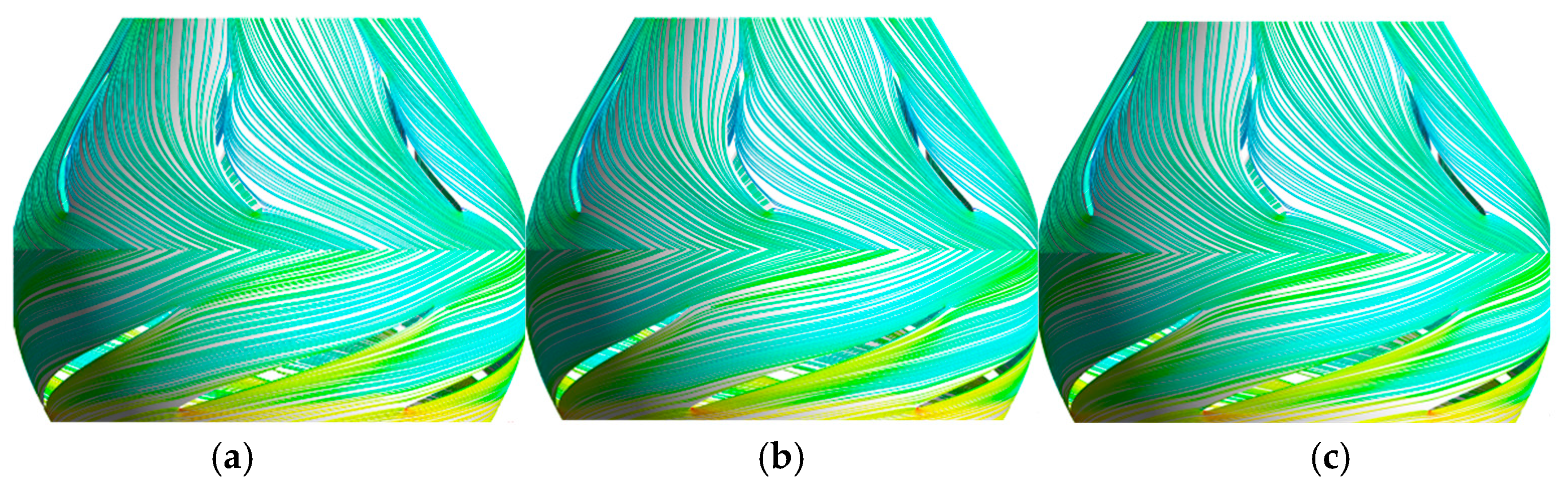
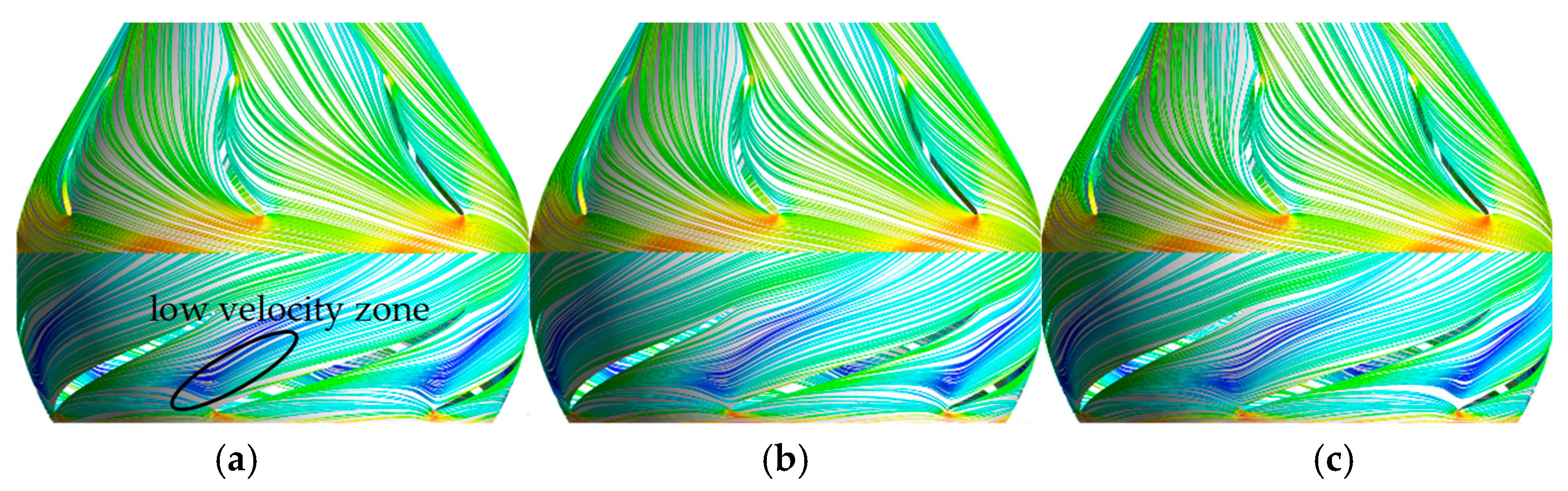
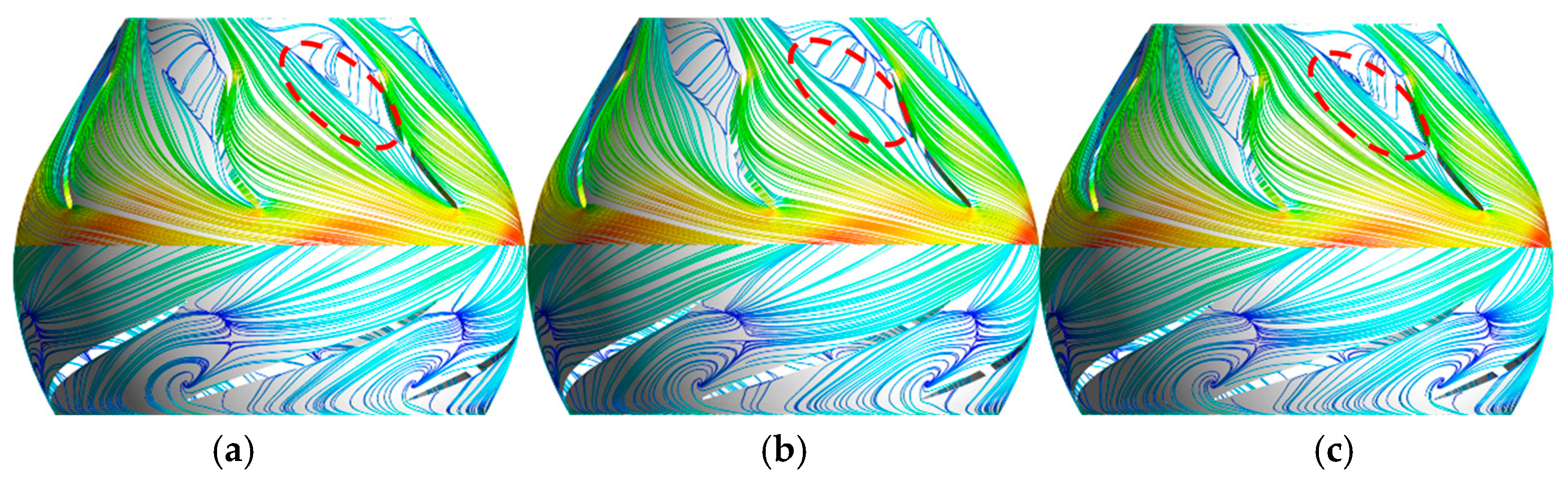
4.2. Unsteady Flow Characteristics
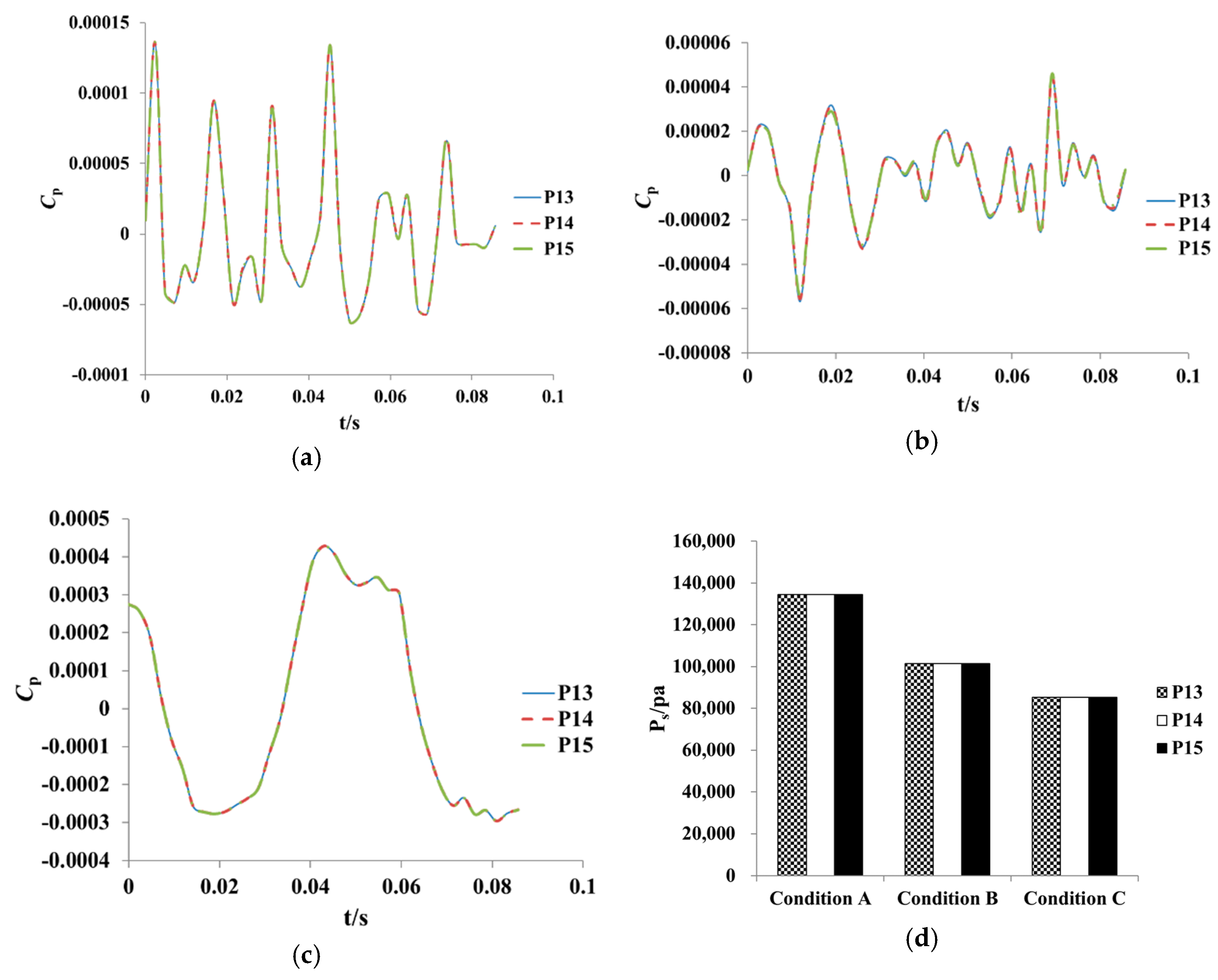
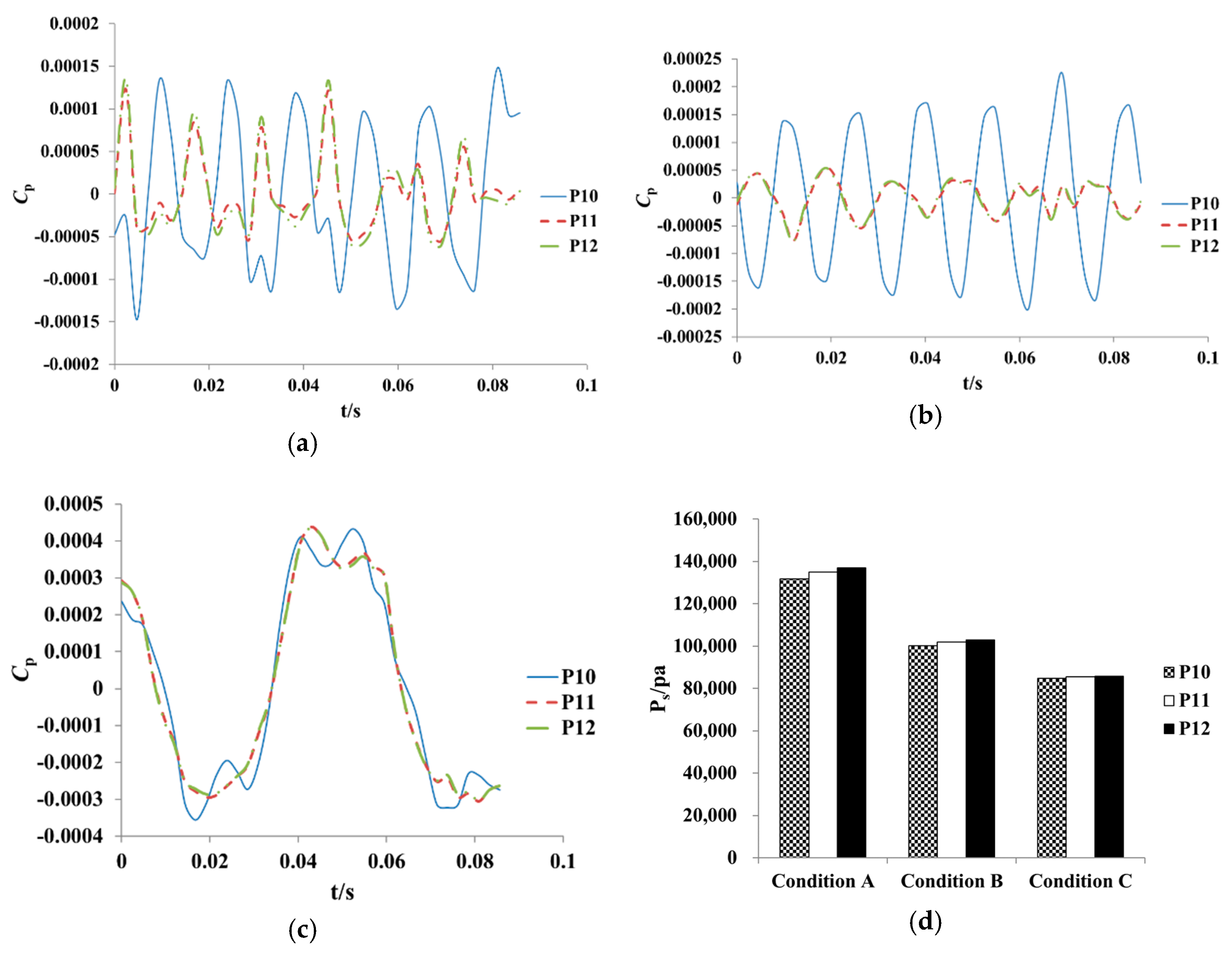
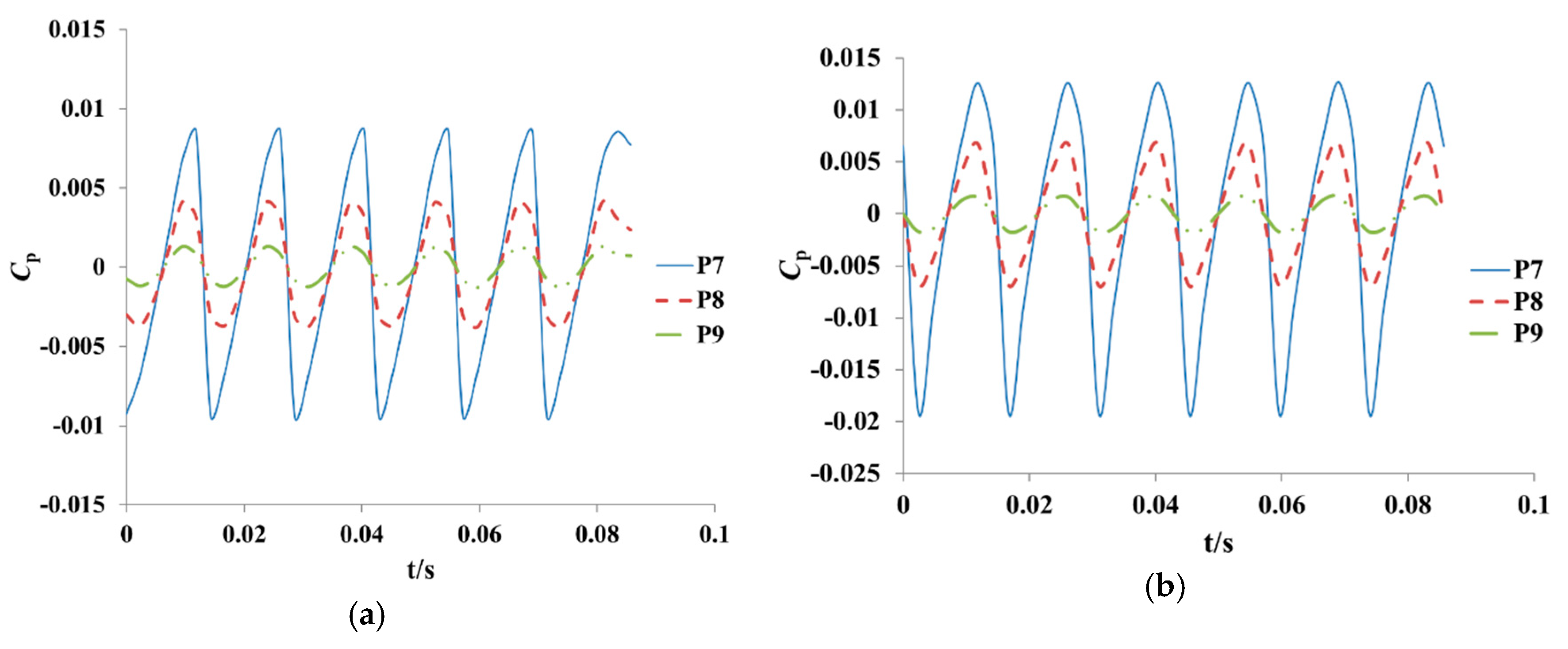
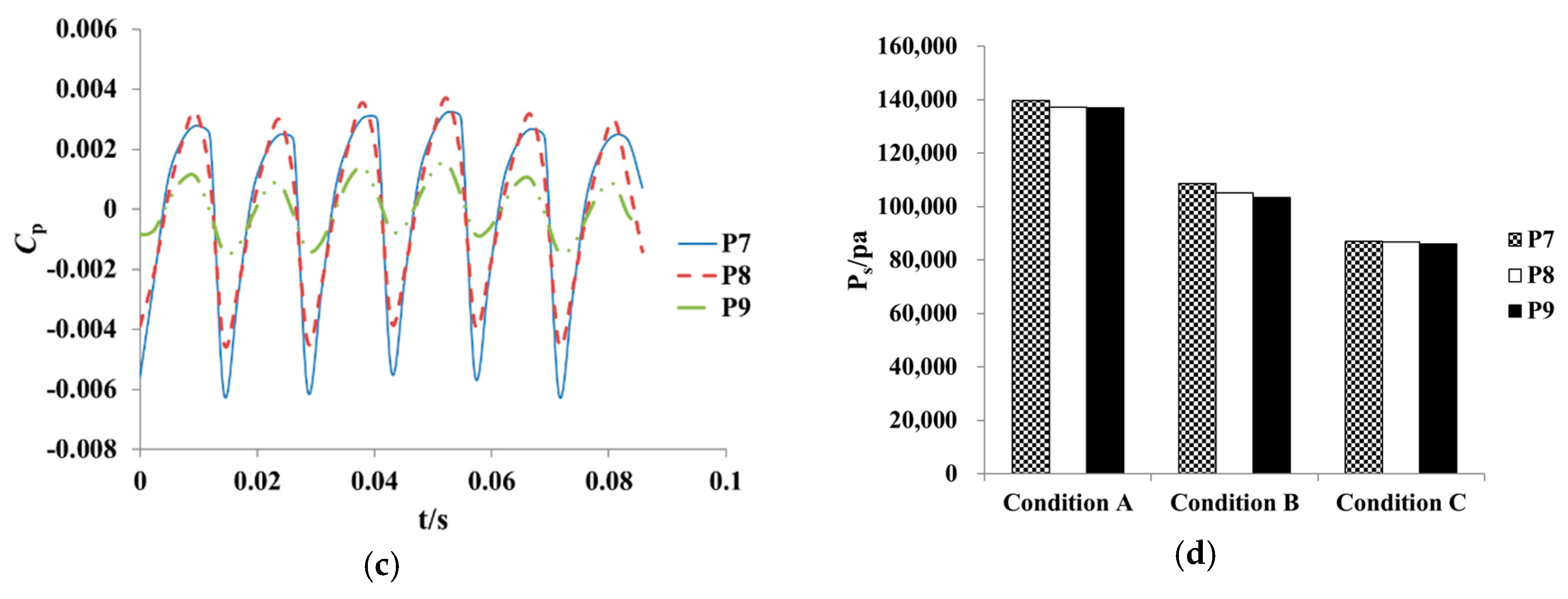
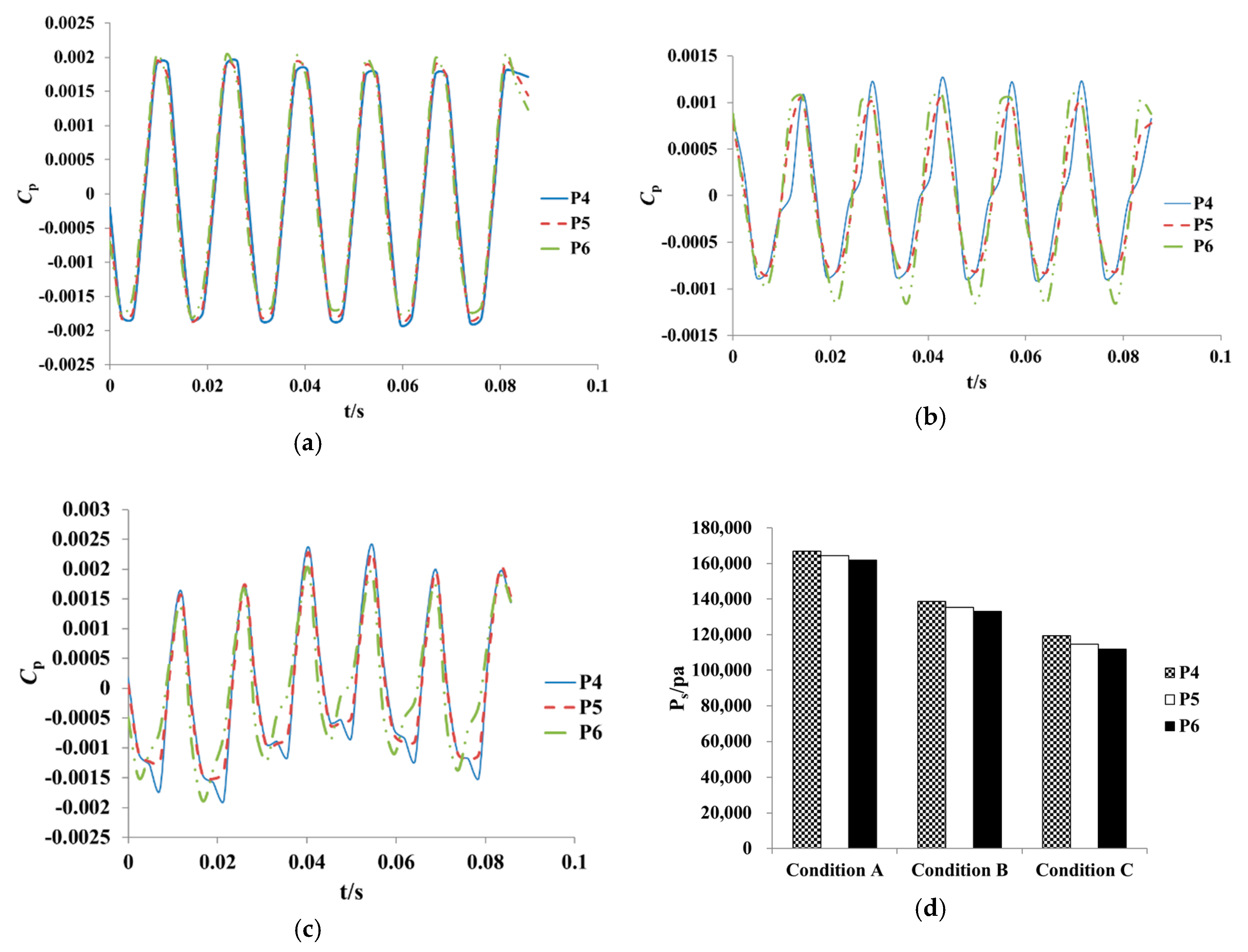
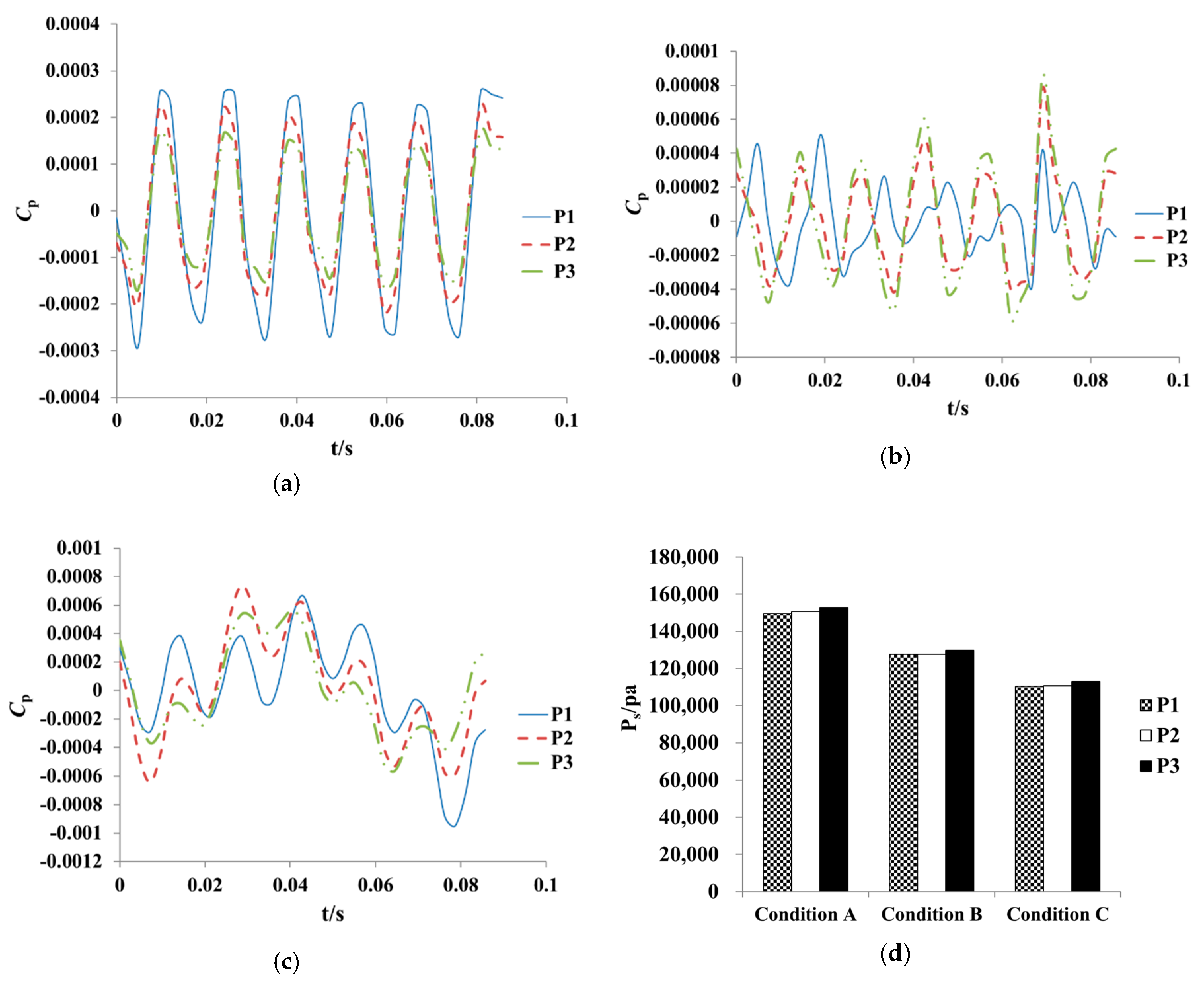
4.3. Pressure Pulsation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- John, A. Marine Waterjet Propulsion. SNAME Trans. 1993, 101, 275–335. [Google Scholar]
- Tang, F. Design and Turbulence Numerical Analysis of Waterjet Axial-Flow Pump; Shanghai Jiaotong University: Shanghai, China, 2006. [Google Scholar]
- Jin, P. MarineWater-Jet Propulsion; National Defence Industry Press: Beijing, China, 1986. [Google Scholar]
- Zhou, Z.; Lu, X.; Xia, J. Design of rotor profiles in symmetry twin-screw pump for new water jet propulsion. J. Nav. Univ. Eng. 2011, 23, 83–85. [Google Scholar]
- Cao, P.; Wang, Y.; Qian, K.X.; Li, G. Comparisons of Hydraulic Performance in Permanent Maglev Pump for Water-Jet Propulsion. Adv. Mech. Eng. 2014, 1–16. [Google Scholar] [CrossRef]
- Forouhar, A.S.; Liebling, M.; Hickerson, A.; Nasiraei-Moghaddam, A.; Tsai, H.; Hove, J.R.; Fraser, S.E.; Dickinson, M.E.; Gharib, M. The Embryonic Vertebrate Heart Tube Is a Dynamic Suction Pump. Science 2006, 312, 751–753. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Seo, Y.; Aydin, O.; Elhebeary, M.; Kamm, R.D.; Kong, H.; Saif, M.T.A. Biohybrid valveless cpump-bot powered by engineered skeletal muscle. Proc. Natl. Acad. Sci. USA 2019, 116, 1543–1548. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Xia, S.; Ye, S.; Xu, B.; Song, W.; Zhu, S.; Xiang, J. Experimental investigation on the noise reduction of an axial piston pump using free-layer damping material treatment. Appl. Acoust. 2018, 139, 1–7. [Google Scholar] [CrossRef]
- Wang, C.; Chen, X.X.; Qiu, N.; Zhu, Y.; Shi, W.D. Numerical and experimental study on the pressure fluctuation, vibration, and noise of multistage pump with radial diffuser. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 481. [Google Scholar] [CrossRef]
- Ye, S.; Zhang, J.; Xu, B.; Zhu, S.; Xiang, J.; Tang, H. Theoretical investigation of the contributions of the excitation forces to the vibration of an axial piston pump. Mech. Syst. Signal. Process. 2019, 129, 201–217. [Google Scholar] [CrossRef]
- Zhu, Y.; Tang, S.; Quan, L.; Jiang, W.; Zhou, L. Extraction method for signal effective component based on extreme-point symmetric mode decomposition and Kullback-Leibler divergence. J. Braz. Soc. Mech. Sci. Eng. 2019, 41, 100. [Google Scholar] [CrossRef]
- Zhu, Y.; Qian, P.; Tang, S.; Jiang, W.; Li, W.; Zhao, J. Amplitude-frequency characteristics analysis for vertical vibration of hydraulic AGC system under nonlinear action. AIP Adv. 2019, 9, 035019. [Google Scholar] [CrossRef]
- Zhu, Y.; Tang, S.; Wang, C.; Jiang, W.; Yuan, X.; Lei, Y. Bifurcation characteristic research on the load vertical vibration of a hydraulic automatic gauge control system. Processes 2019, 7, 718. [Google Scholar] [CrossRef]
- Wang, C.; Hu, B.; Zhu, Y.; Wang, X.; Luo, C.; Cheng, L. Numerical study on the gas-water two-phase flow in the self-priming process of self-priming centrifugal pump. Processes 2019, 7, 330. [Google Scholar] [CrossRef]
- He, X.; Jiao, W.; Wang, C.; Cao, W. Influence of surface roughness on the pump performance based on Computational Fluid Dynamics. IEEE Access 2019, 7, 105331–105341. [Google Scholar] [CrossRef]
- Wang, C.; He, X.; Zhang, D.; Hu, B. Numerical and experimental study of the self-priming process of a multistage self-priming centrifugal pump. Int. J. Energy Res. 2019, 1–19. [Google Scholar] [CrossRef]
- Yang, H.; Zhang, W.; Zhu, Z. Unsteady mixed convection in a square enclosure with an inner cylinder rotating in a bi-directional and time-periodic mode. Int. J. Heat Mass Transf. 2019, 136, 563–580. [Google Scholar] [CrossRef]
- Wang, C.; He, X.; Shi, W.; Wang, X.; Qiu, N. Numerical study on pressure fluctuation of a multistage centrifugal pump based on whole flow field. AIP Adv. 2019, 9, 035118. [Google Scholar] [CrossRef]
- Wang, C.; Shi, W.; Wang, X.; Jiang, X.; Yang, Y.; Li, W.; Zhou, L. Optimal design of multistage centrifugal pump based on the combined energy loss model and computational fluid dynamics. Appl. Energy 2017, 187, 10–26. [Google Scholar] [CrossRef]
- Jiao, W.; Cheng, L.; Xu, J.; Wang, C. Numerical analysis of two-phase flow in the cavitation process of a waterjet propulsion pump system. Processes 2019, 7, 690. [Google Scholar] [CrossRef]
- Qian, J.Y.; Chen, M.R.; Liu, X.L.; Jin, Z.J. A numerical investigation of the flow of nanofluids through a micro Tesla valve. J. Zhejiang Univ. -Sci. A 2019, 20, 50–60. [Google Scholar] [CrossRef]
- Qian, J.Y.; Gao, Z.X.; Liu, B.Z.; Jin, Z.J. Parametric study on fluid dynamics of pilot-control angle globe valve. ASME J. Fluids Eng. 2018, 140, 111103. [Google Scholar] [CrossRef]
- Wang, X.; Su, B.; Li, Y.; Wang, C. Vortex formation and evolution process in an impulsively starting jet from long pipe. Ocean. Eng. 2019, 176, 134–143. [Google Scholar] [CrossRef]
- Chang, H.; Shi, W.; Li, W.; Wang, C.; Zhou, L.; Liu, J.; Yang, Y.; Agarwal, R. Experimental optimization of jet self-priming centrifugal pump based on orthogonal design and grey-correlational method. J. Therm. Sci. 2019, 1–10. [Google Scholar] [CrossRef]
- Hu, B.; Li, X.; Fu, Y.; Zhang, F.; Gu, C.; Ren, X.; Wang, C. Experimental investigation on the flow and flow-rotor heat transfer in a rotor-stator spinning disk reactor. Appl. Therm. Eng. 2019, 162, 114316. [Google Scholar] [CrossRef]
- Zhu, Y.; Tang, S.; Wang, C.; Jiang, W.; Zhao, J.; Li, G. Absolute stability condition derivation for position closed-loop system in hydraulic automatic gauge control. Processes 2019, 7, 766. [Google Scholar] [CrossRef]
- Ahn, J.W.; Kim, K.S.; Park, Y.H.; Kim, K.Y.; Oh, H.W. Performance analysis of mixed-flow pump for waterjet. In Proceedings of the Fourth Conference for New Ship and Marine Technology, Shanghai, China, 1 January 2004; pp. 109–116. [Google Scholar]
- Wu, H.; Soranna, F.; Micheal, T.; Katz, J.; Jessup, S. Cavitation visualizes the flow structure in the tip region of a waterjet pump rotor blade. In Proceedings of the 27th Symposium on naval hydrodynamics, Seoul, Korea, 5–10 October 2008. [Google Scholar]
- Tang, F.-P.; Wang, G.-Q. Influence of Outlet Guide Vanes upon Performances of Waterjet Axial- Flow Pump. J. Ship Mech. 2006, 10, 19–26. [Google Scholar]
- Duerr, P.; von Ellenrieder, K.D. Scaling and Numerical Analysis of Nonuniform Waterjet Pump Inflows. IEEE J. Ocean. Eng. 2015, 40, 701–709. [Google Scholar] [CrossRef]
- Bulten, N.W.H.; Verbeek, R. CFD simulation of the flow through a water jet installation. In Proceedings of the International Conference on Waterjet Propulsion 4, London, UK, 26–27 May 2004. [Google Scholar]
- Bulten, N.W.H. Influence of boundary layer ingestion on water jet performance parameters at high ship speeds. In Proceedings of the 5th International Conference on Fast Sea Transportation, Seattle, WA, USA, 31 August–2 September 1999. [Google Scholar]
- Brandner, P.A.; Walker, G.J. A waterjet test loop for the tom fink cavitation tunnel. In Proceedings of the International Conference on Waterjet Propulsion III, Amsterdam, The Netherlands, 22–23 October 2001. [Google Scholar]
- Brandner, P.A.; Walker, G.J. An experimental investigation into the performance of a flush water-jet inlet. J. Ship Res. 2007, 51, 1–21. [Google Scholar]
- Park, W.G.; Yun, H.S.; Chun, H.H.; Kim, M.C. Numerical flow simulation of flush type intake duct of waterjet. Ocean. Eng. 2005, 32, 2107–2120. [Google Scholar] [CrossRef]
- Park, W.G.; Yun, H.S.; Chun, H.H.; Kim, M.C. Numerical flow and performance analysis of waterjet propulsion system. Ocean. Eng. 2005, 32, 1740–1761. [Google Scholar] [CrossRef]
- Gong, J.; Guo, C.-Y.; Wu, T.-C.; Song, K.-W. Numerical Study on the Unsteady Hydrodynamic Performance of a Waterjet Impeller. J. Coast. Res. 2018, 34, 151–163. [Google Scholar] [CrossRef]
- Cao, P.; Wang, Y.; Kang, C.; Li, G.; Zhang, X. Investigation of the role of non-uniform suction flow in the performance of water-jet pump. Ocean Eng. 2017, 140, 258–269. [Google Scholar] [CrossRef]
- Zhang, Z.; Cao, S.; Luo, X.; Shi, W.; Zhu, Y. Research on the thrust of a high-pressure water jet propulsion system. Ships Offshore Struct. 2017, 13, 1–9. [Google Scholar] [CrossRef]
- Cheng, L.; Qi, W. Rotating stall region of water-jet pump. Trans. FAMENA 2014, 38, 31–40. [Google Scholar]
- Xia, C.; Cheng, L.; Luo, C.; Jiao, W.; Zhang, D. Hydraulic Characteristics and Measurement of Rotating Stall Suppression in a Waterjet Propulsion System. Trans. FAMENA 2018, 42, 85–100. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Location |
|---|---|
| P1–P3 | Outlet of guide vane (GV) |
| P4–P6 | Outlet of impeller |
| P7–P9 | Inlet of impeller |
| P10–P12 | Outlet of the prolonged inlet section |
| P13–P15 | In the prolonged inlet section |
| Condition | Parameters | P13 | P14 | P15 | |||
|---|---|---|---|---|---|---|---|
| MF | SF | MF | SF | MF | SF | ||
| Condition A | f/Hz | 26.25 | 40.83 | 26.25 | 40.83 | 26.25 | 40.83 |
| Tf | 2.25 | 3.50 | 2.25 | 3.50 | 2.25 | 3.50 | |
| Ps/Pa | 584.39 | 192.31 | 584.41 | 192.31 | 584.43 | 192.32 | |
| Condition B | f/Hz | 26.25 | 40.83 | 26.25 | 40.83 | 26.25 | 40.83 |
| Tf | 2.25 | 3.50 | 2.25 | 3.50 | 2.25 | 3.50 | |
| Ps/Pa | 441.86 | 145.12 | 441.86 | 145.13 | 441.87 | 145.13 | |
| Condition C | f/Hz | 26.25 | 40.83 | 26.25 | 40.83 | 26.25 | 40.83 |
| Tf | 2.25 | 3.50 | 2.25 | 3.50 | 2.25 | 3.50 | |
| Ps/Pa | 380.26 | 120.18 | 380.26 | 120.18 | 380.27 | 120.18 | |
| Condition | Parameters | P10 | P11 | P12 | |||
|---|---|---|---|---|---|---|---|
| MF | SF | MF | SF | MF | SF | ||
| Condition A | f/Hz | 26.25 | 40.83 | 26.25 | 40.83 | 26.25 | 40.83 |
| Tf | 2.25 | 3.50 | 2.25 | 3.50 | 2.25 | 3.50 | |
| Ps/Pa | 572.23 | 188.36 | 586.94 | 193.14 | 595.22 | 195.86 | |
| Condition B | f/Hz | 26.25 | 40.83 | 26.25 | 40.83 | 26.25 | 40.83 |
| Tf | 2.25 | 3.50 | 2.25 | 3.50 | 2.25 | 3.50 | |
| Ps/Pa | 435.41 | 142.97 | 443.21 | 145.57 | 447.65 | 147.03 | |
| Condition C | f/Hz | 26.25 | 40.83 | 26.25 | 40.83 | 26.25 | 40.83 |
| Tf | 2.25 | 3.50 | 2.25 | 3.50 | 2.25 | 3.50 | |
| Ps/Pa | 377.66 | 119.41 | 380.65 | 120.35 | 382.49 | 120.94 | |
| Condition | Parameters | P7 | P8 | P9 | |||
|---|---|---|---|---|---|---|---|
| MF | SF | MF | SF | MF | SF | ||
| Condition A | f/Hz | 70 | 140 | 70 | 26.25 | 26.25 | 70 |
| Tf | 6 | 12 | 6 | 2.25 | 2.25 | 6 | |
| Ps/Pa | 4600.42 | 1843.95 | 2115.09 | 587.59 | 593.25 | 444.94 | |
| Condition B | f/Hz | 70 | 140 | 70 | 140 | 70 | 26.25 |
| Tf | 6 | 12 | 6 | 12 | 6 | 2.25 | |
| Ps/Pa | 2706.53 | 1260.64 | 1358.23 | 451.00 | 581.55 | 414.95 | |
| Condition C | f/Hz | 70 | 140 | 70 | 26.25 | 70 | 26.25 |
| Tf | 6 | 12 | 6 | 2.25 | 6 | 2.25 | |
| Ps/Pa | 1100.13 | 370.35 | 986.14 | 349.29 | 385.55 | 357.89 | |
| Condition | Parameters | P4 | P5 | P6 | |||
|---|---|---|---|---|---|---|---|
| MF | SF | MF | SF | MF | SF | ||
| Condition A | f/Hz | 26.25 | 70 | 26.25 | 70 | 26.25 | 70 |
| Tf | 2.25 | 6 | 2.25 | 6 | 2.25 | 6 | |
| Ps/Pa | 720.35 | 680.70 | 710.37 | 680.93 | 699.73 | 664.23 | |
| Condition B | f/Hz | 26.25 | 70 | 26.25 | 70 | 26.25 | 70 |
| Tf | 2.25 | 6 | 2.25 | 6 | 2.25 | 6 | |
| Ps/Pa | 601.99 | 304.07 | 587.76 | 301.68 | 577.25 | 372.17 | |
| Condition C | f/Hz | 70 | 26.25 | 26.25 | 70 | 26.25 | 70 |
| Tf | 6 | 2.25 | 2.25 | 6 | 2.25 | 6 | |
| Ps/Pa | 524.16 | 520.84 | 499.13 | 486.14 | 482.78 | 425.16 | |
| Condition | Parameters | P1 | P2 | P3 | |||
|---|---|---|---|---|---|---|---|
| MF | SF | MF | SF | MF | SF | ||
| Condition A | f/Hz | 26.25 | 40.83 | 26.25 | 40.83 | 26.25 | 40.83 |
| Tf | 2.25 | 3.50 | 2.25 | 3.50 | 2.25 | 3.50 | |
| Ps/Pa | 649.35 | 213.56 | 654.13 | 215.19 | 664.25 | 218.49 | |
| Condition B | f/Hz | 26.25 | 40.83 | 26.25 | 40.83 | 26.25 | 40.83 |
| Tf | 2.25 | 3.50 | 2.25 | 3.50 | 2.25 | 3.50 | |
| Ps/Pa | 554.60 | 182.05 | 555.11 | 182.15 | 565.04 | 185.43 | |
| Condition C | f/Hz | 29.62 | 41.46 | 29.17 | 40.83 | 29.17 | 40.83 |
| Tf | 2.53 | 3.55 | 2.50 | 3.50 | 2.50 | 3.50 | |
| Ps/Pa | 488.05 | 157.02 | 486.74 | 156.61 | 497.70 | 156.84 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, C.; Liu, H.; Cheng, L.; Wang, C.; Jiao, W.; Zhang, D. Unsteady Flow Process in Mixed Waterjet Propulsion Pumps with Nozzle Based on Computational Fluid Dynamics. Processes 2019, 7, 910. https://doi.org/10.3390/pr7120910
Luo C, Liu H, Cheng L, Wang C, Jiao W, Zhang D. Unsteady Flow Process in Mixed Waterjet Propulsion Pumps with Nozzle Based on Computational Fluid Dynamics. Processes. 2019; 7(12):910. https://doi.org/10.3390/pr7120910
Chicago/Turabian StyleLuo, Can, Hao Liu, Li Cheng, Chuan Wang, Weixuan Jiao, and Di Zhang. 2019. "Unsteady Flow Process in Mixed Waterjet Propulsion Pumps with Nozzle Based on Computational Fluid Dynamics" Processes 7, no. 12: 910. https://doi.org/10.3390/pr7120910
APA StyleLuo, C., Liu, H., Cheng, L., Wang, C., Jiao, W., & Zhang, D. (2019). Unsteady Flow Process in Mixed Waterjet Propulsion Pumps with Nozzle Based on Computational Fluid Dynamics. Processes, 7(12), 910. https://doi.org/10.3390/pr7120910