Salp Swarm Optimization Algorithm-Based Controller for Dynamic Response and Power Quality Enhancement of an Islanded Microgrid

 and
and
Abstract
:1. Introduction
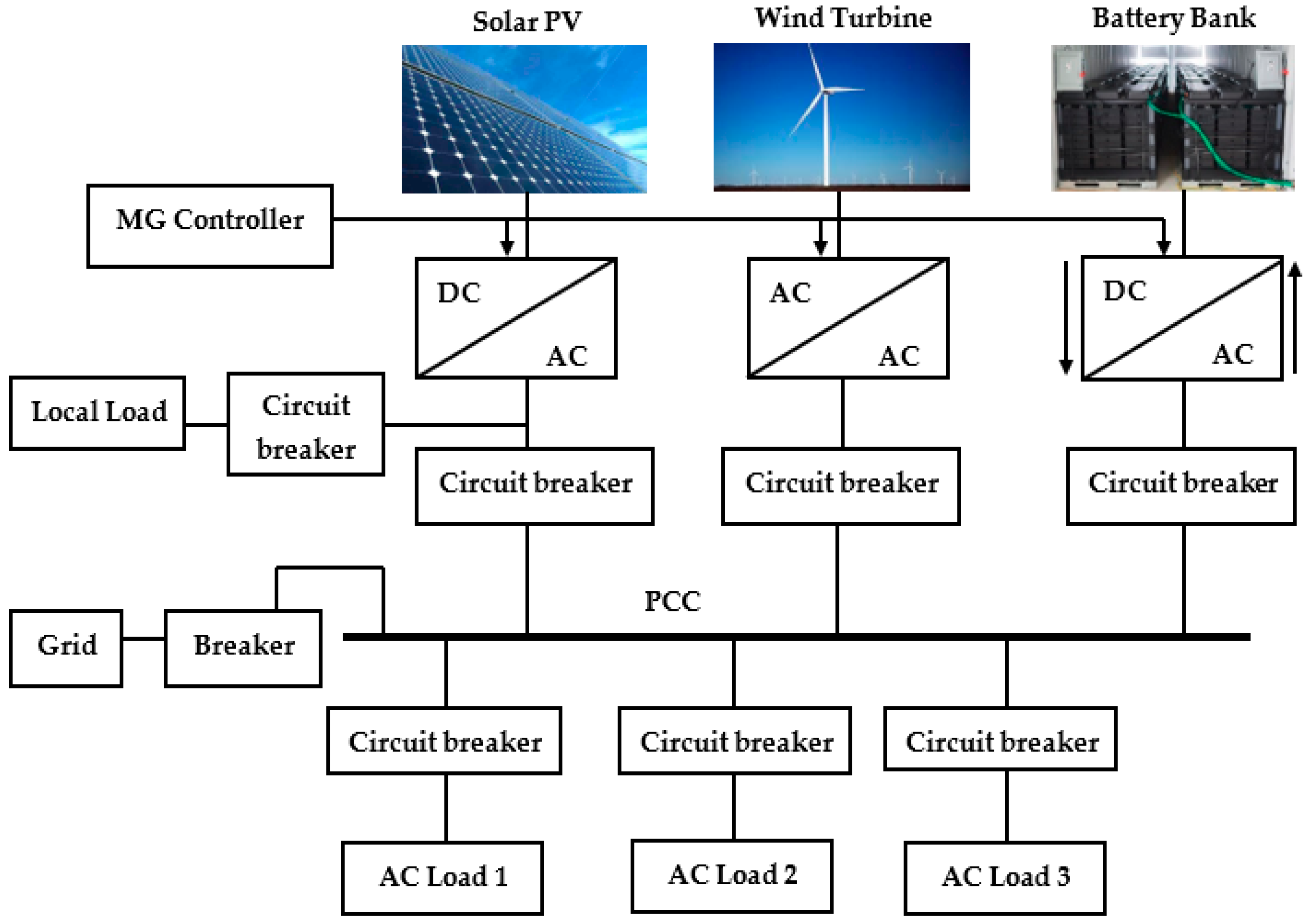
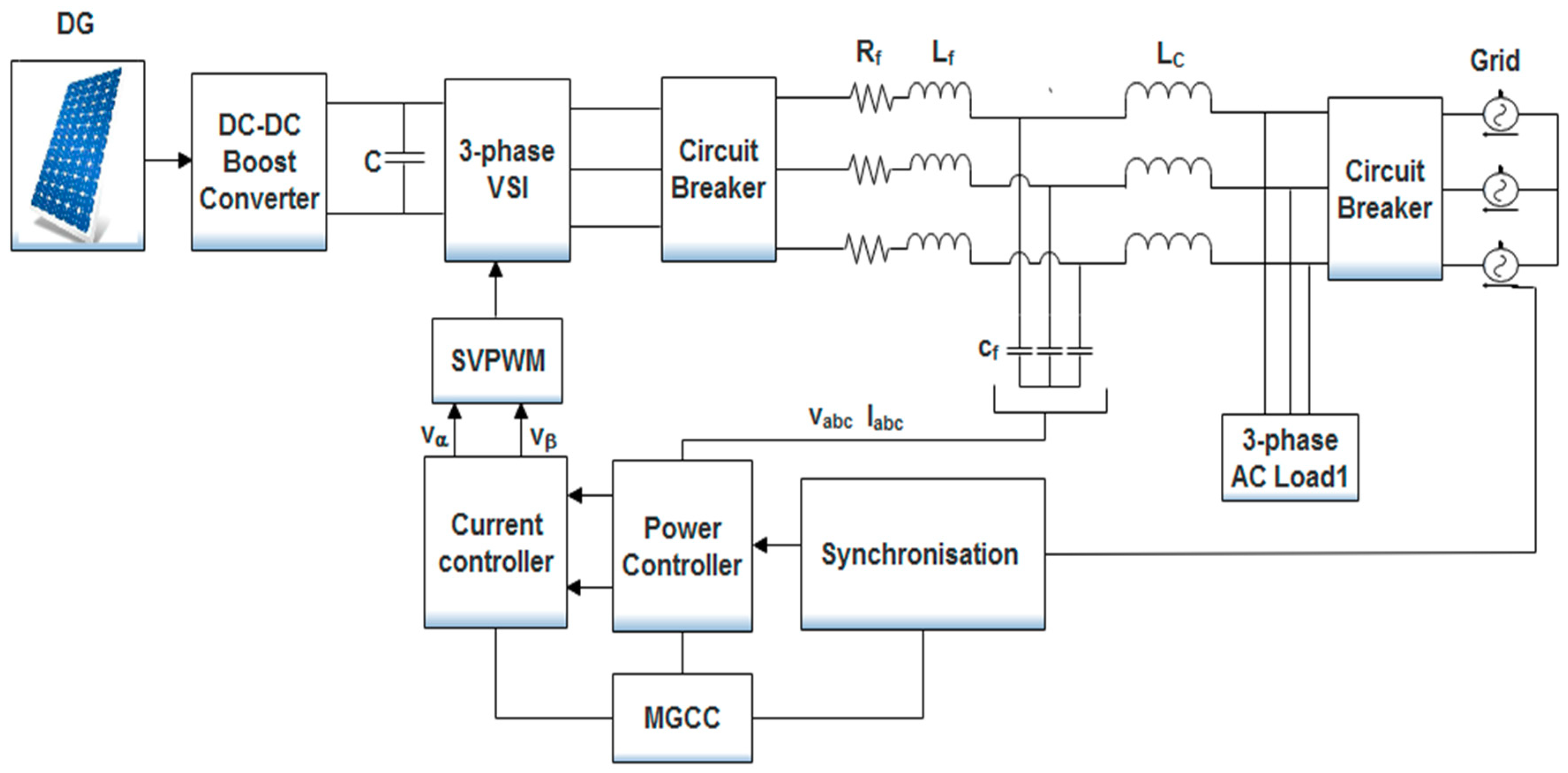
2. Modern Microgrid Control Architectures
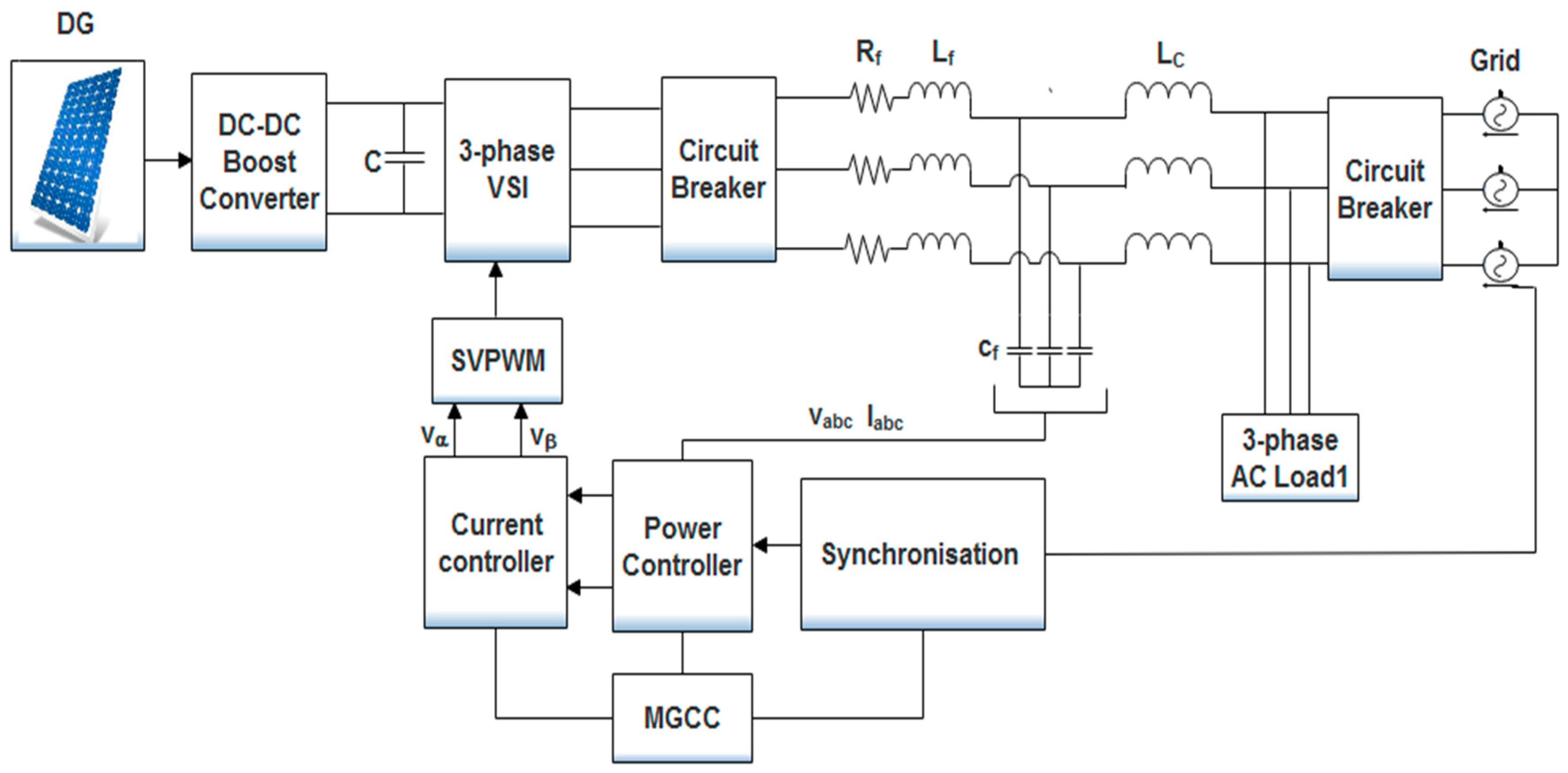
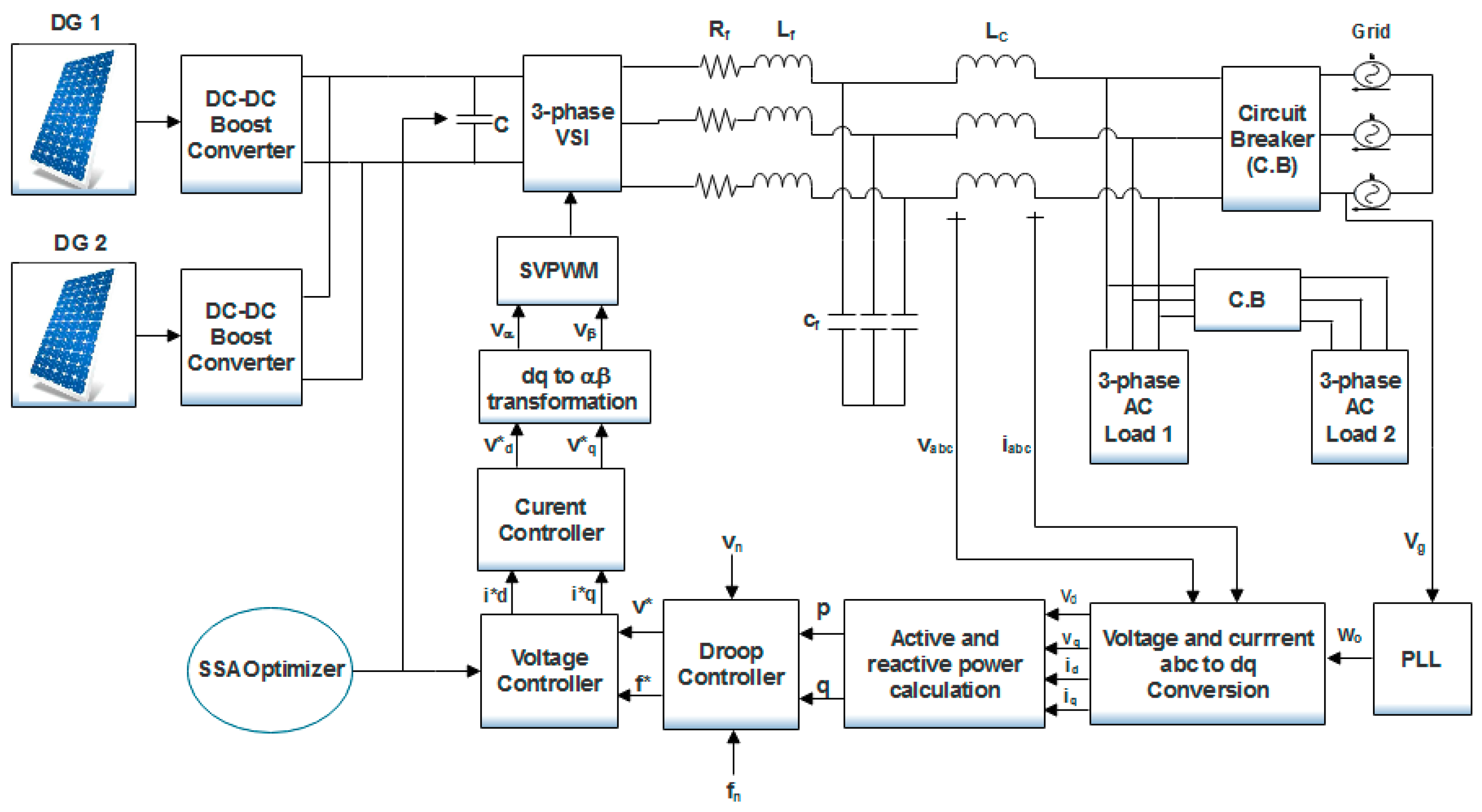
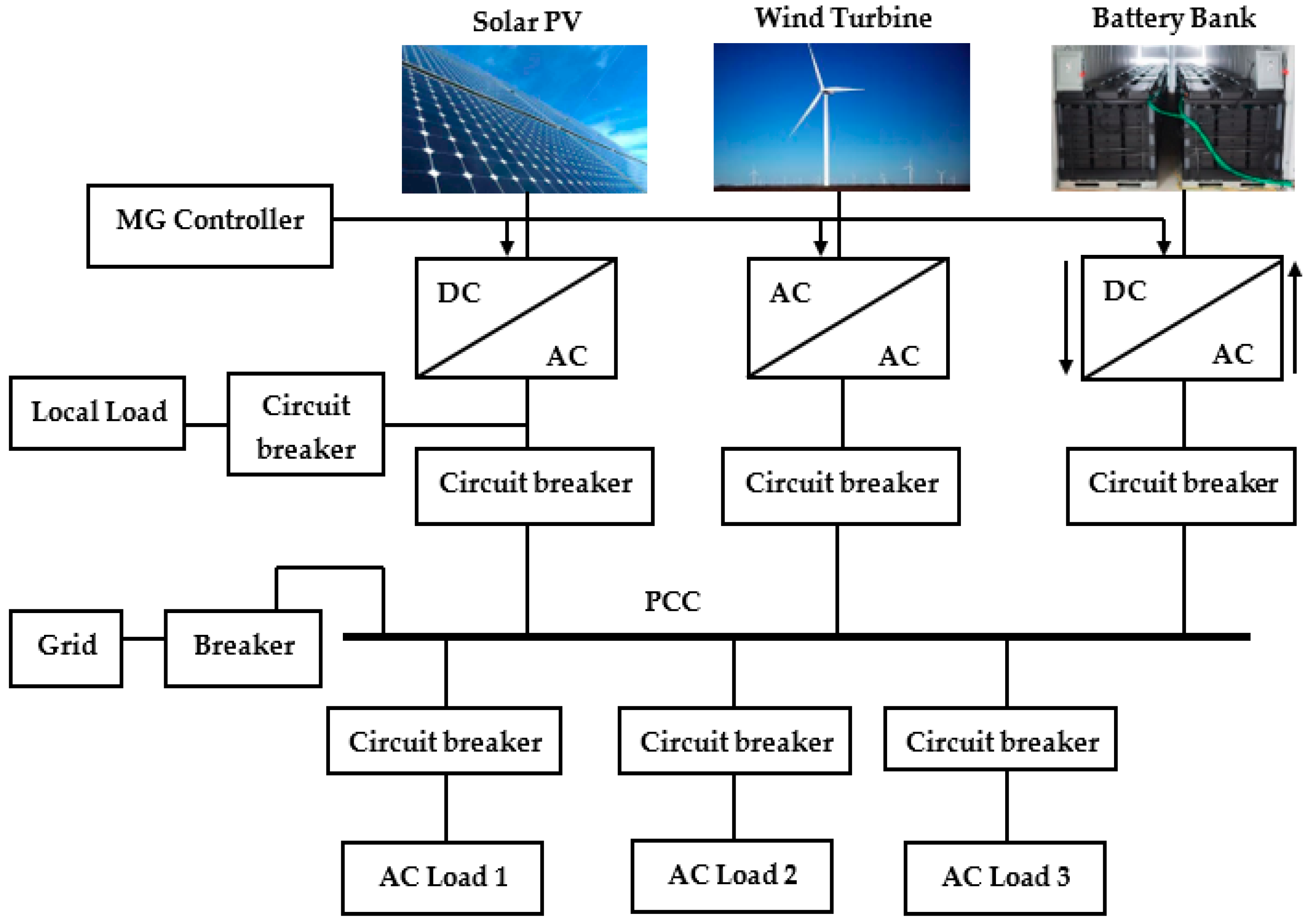
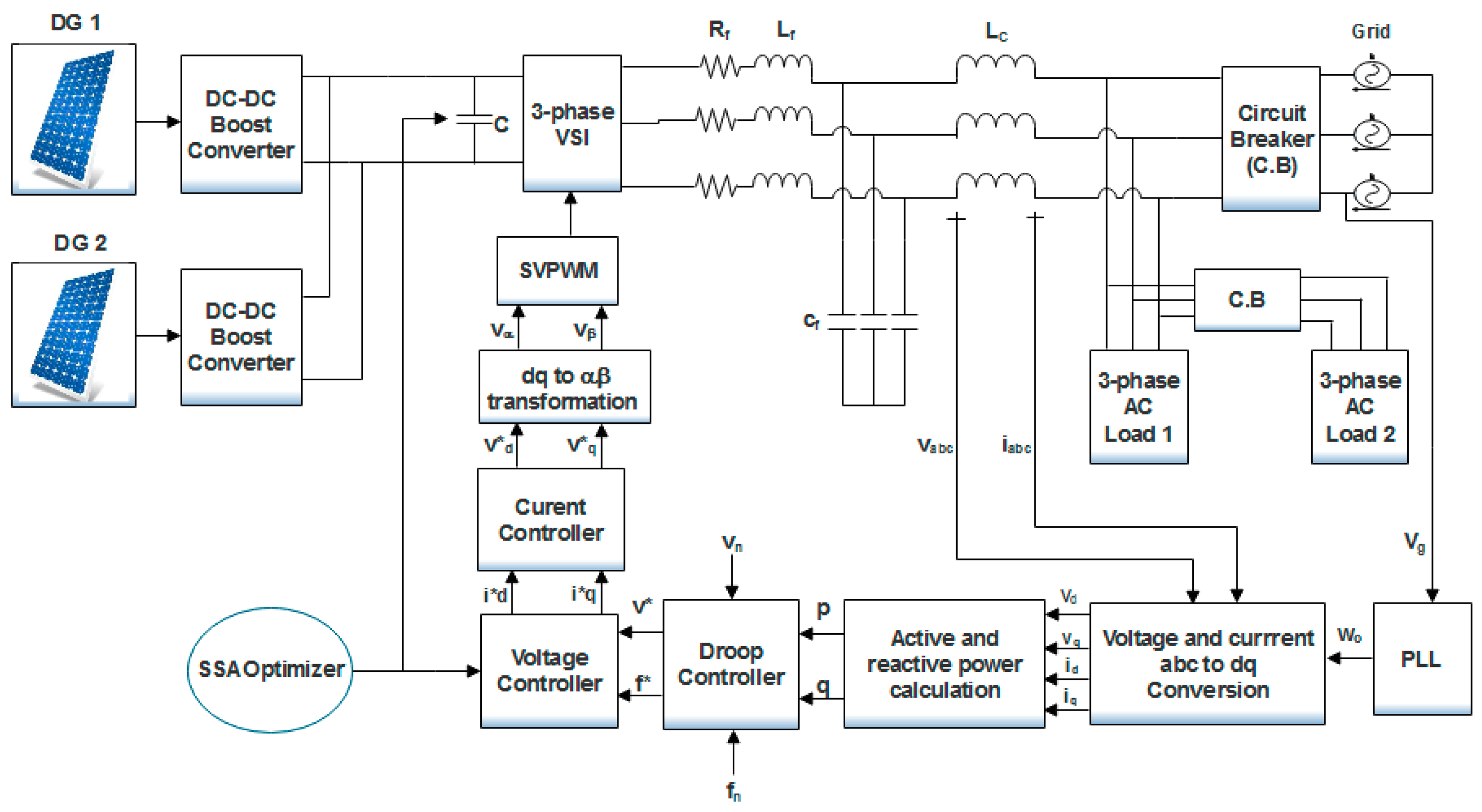
3. Proposed Islanded MG Architecture
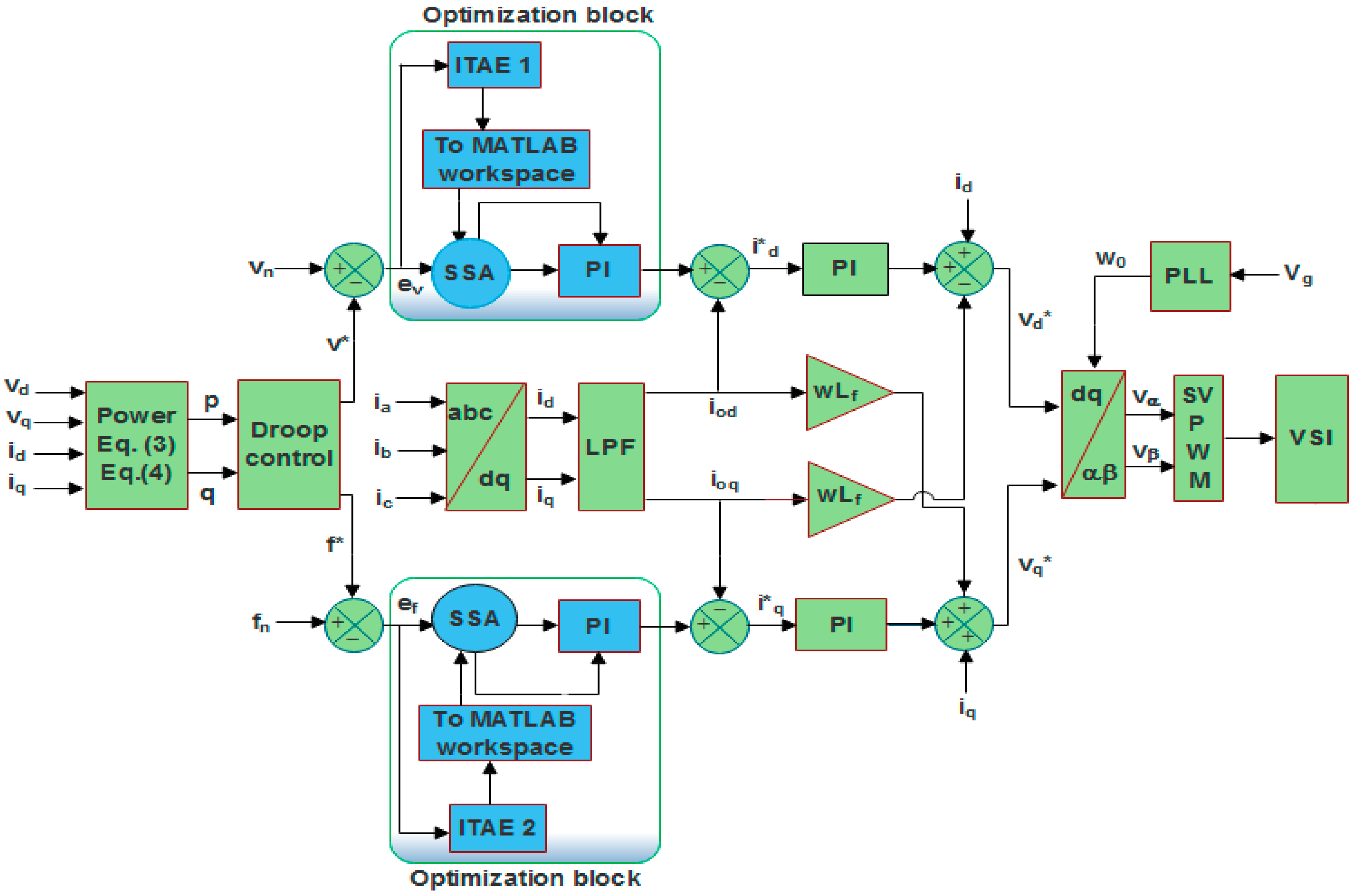
4. Proposed Methodology
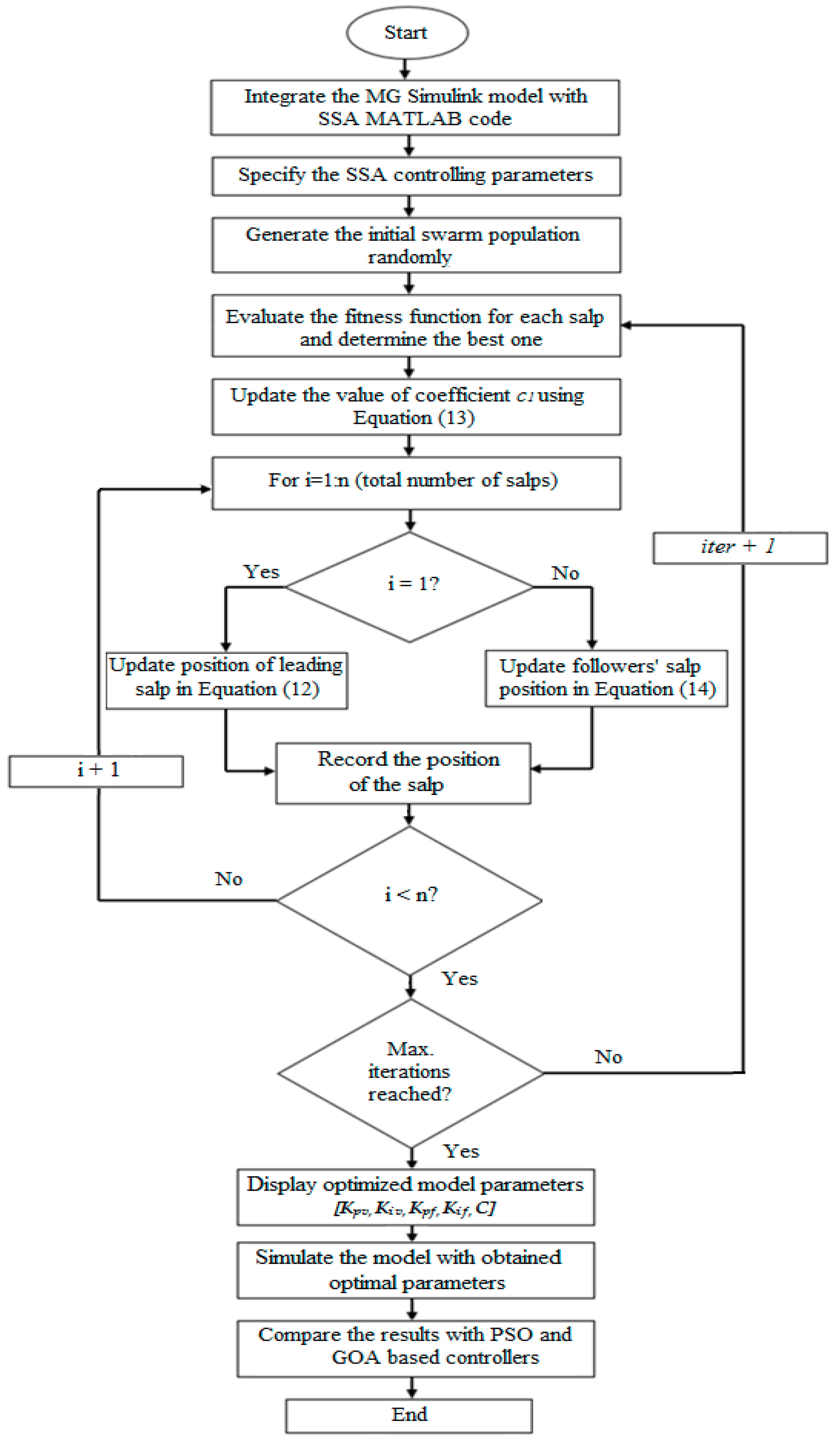
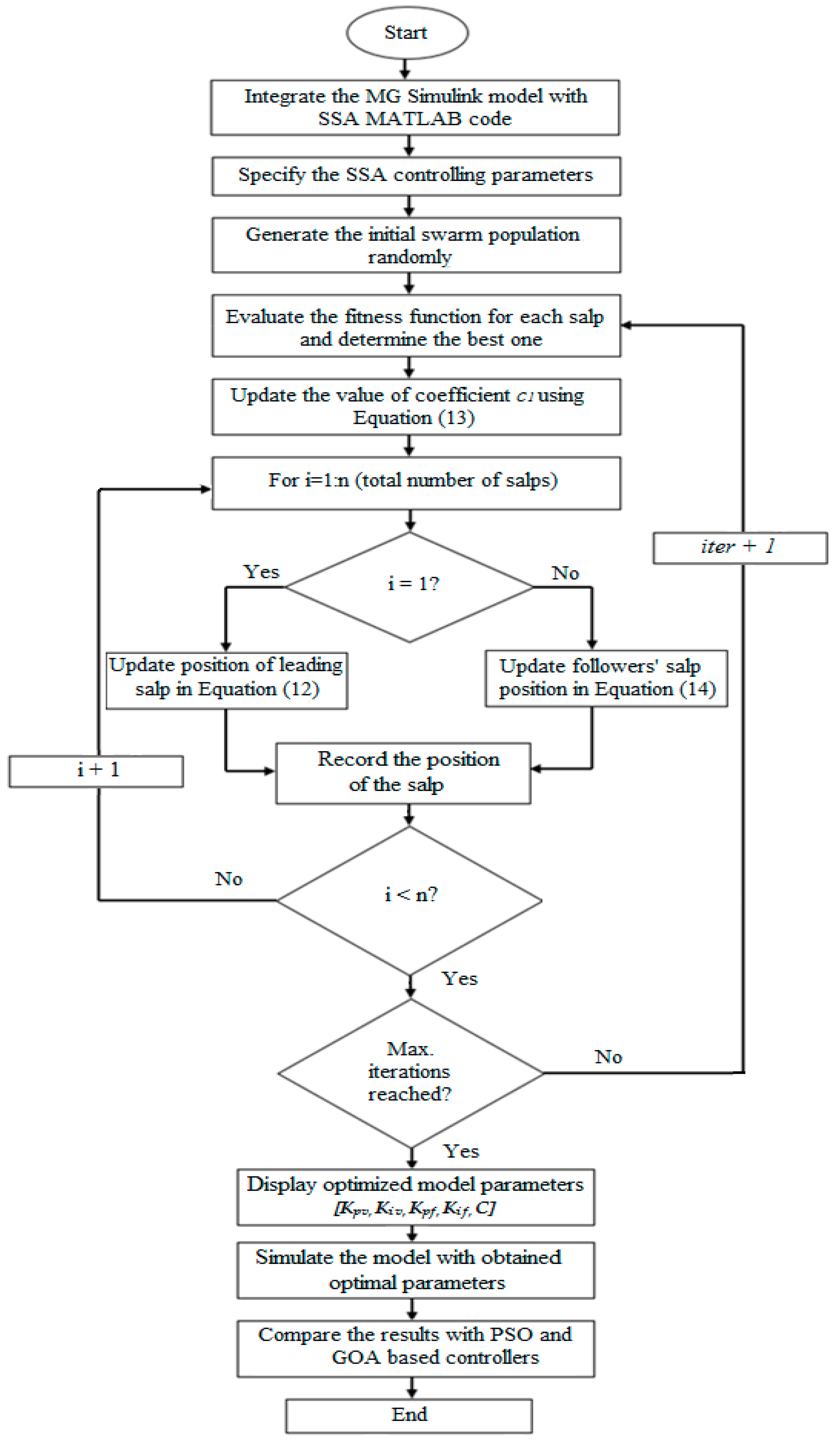
4.1. Salp Swarm Algorithm and Its Implementation
- The algorithm keeps the best-obtained solution after each iteration and assigns it to the global optimum (food source) variable. Hence, it can never be wiped out even if the whole population deteriorates.
- SSA updates the position of the leading salp with respect to the food source only, which is the best solution obtained thus far; therefore, the leader salp always explores and exploits the space around it for a better solution.
- SSA updates the position of follower salps with respect to each other in order to let them move towards the leading salp gradually.
- Gradual movements of follower salps prevent the SSA from being easily stagnating into local optima.
- Parameter c1 is decreased adaptively over the course of iterations, which helps the algorithm to explore the search space at starting and exploits it at the ending phase.
- SSA has only one main controlling parameter (c1), which reduces the complexity and makes it easy to implement.
4.2. Fitness Function Formulation
5. Results and Discussion
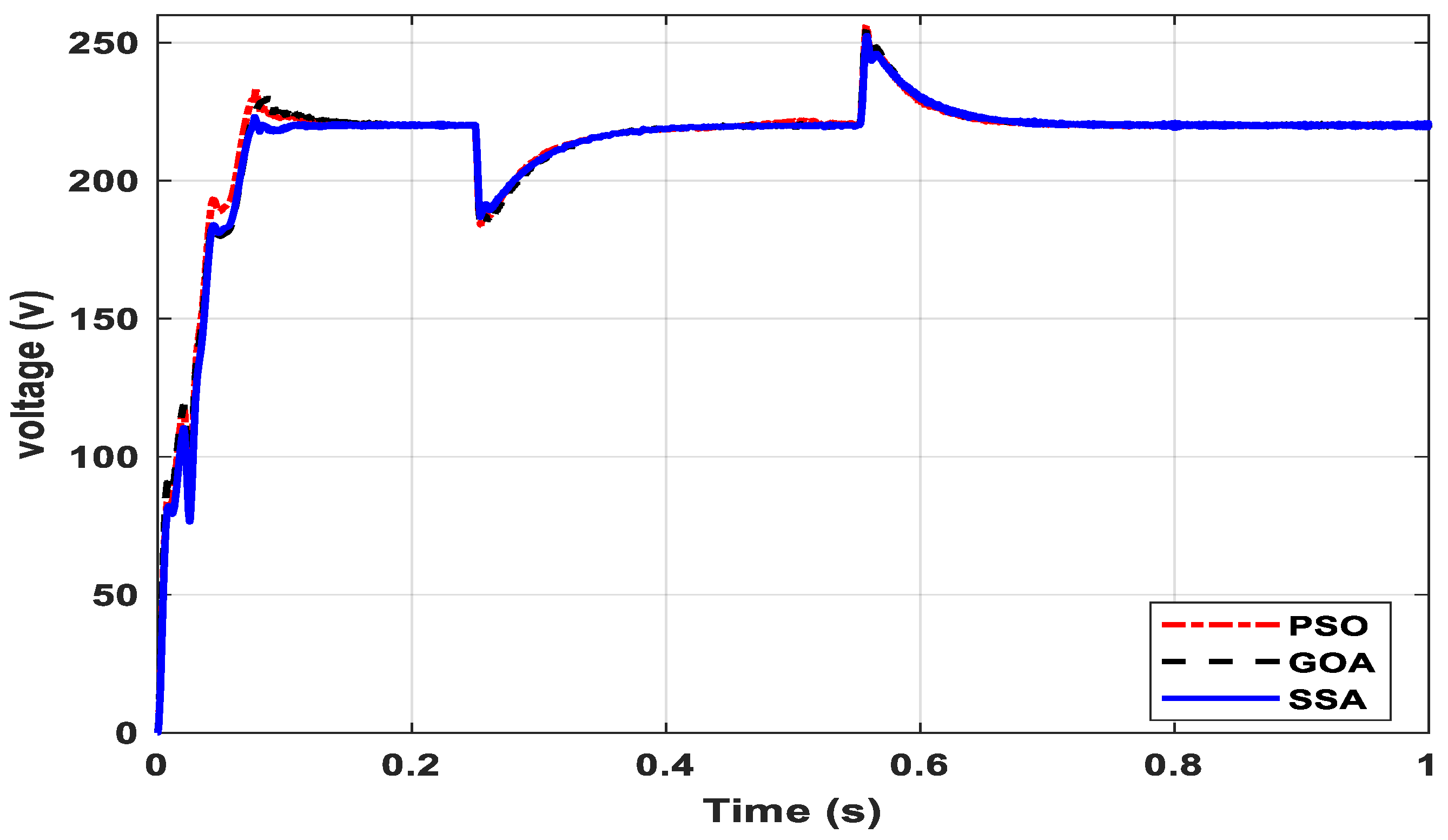
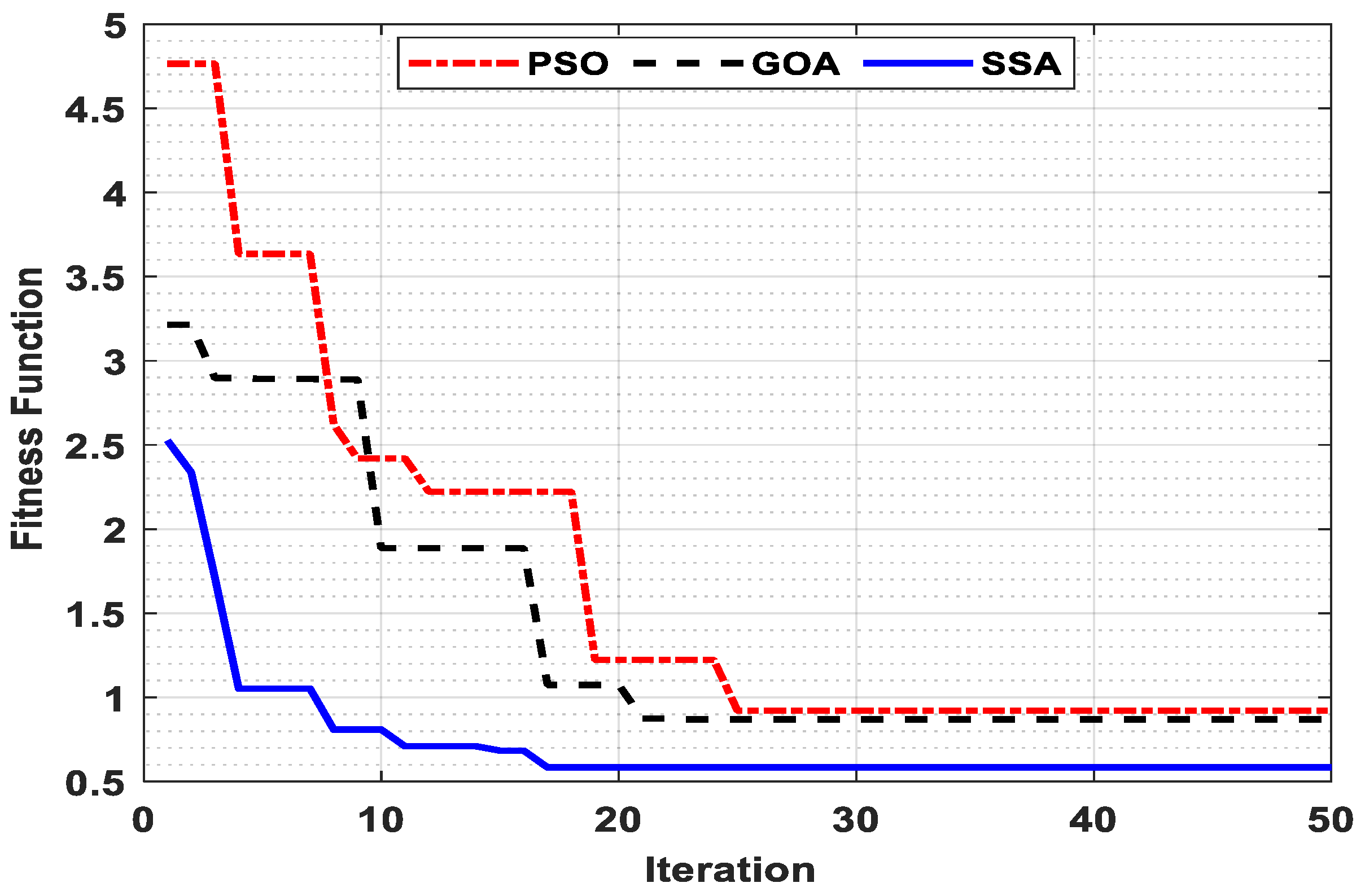
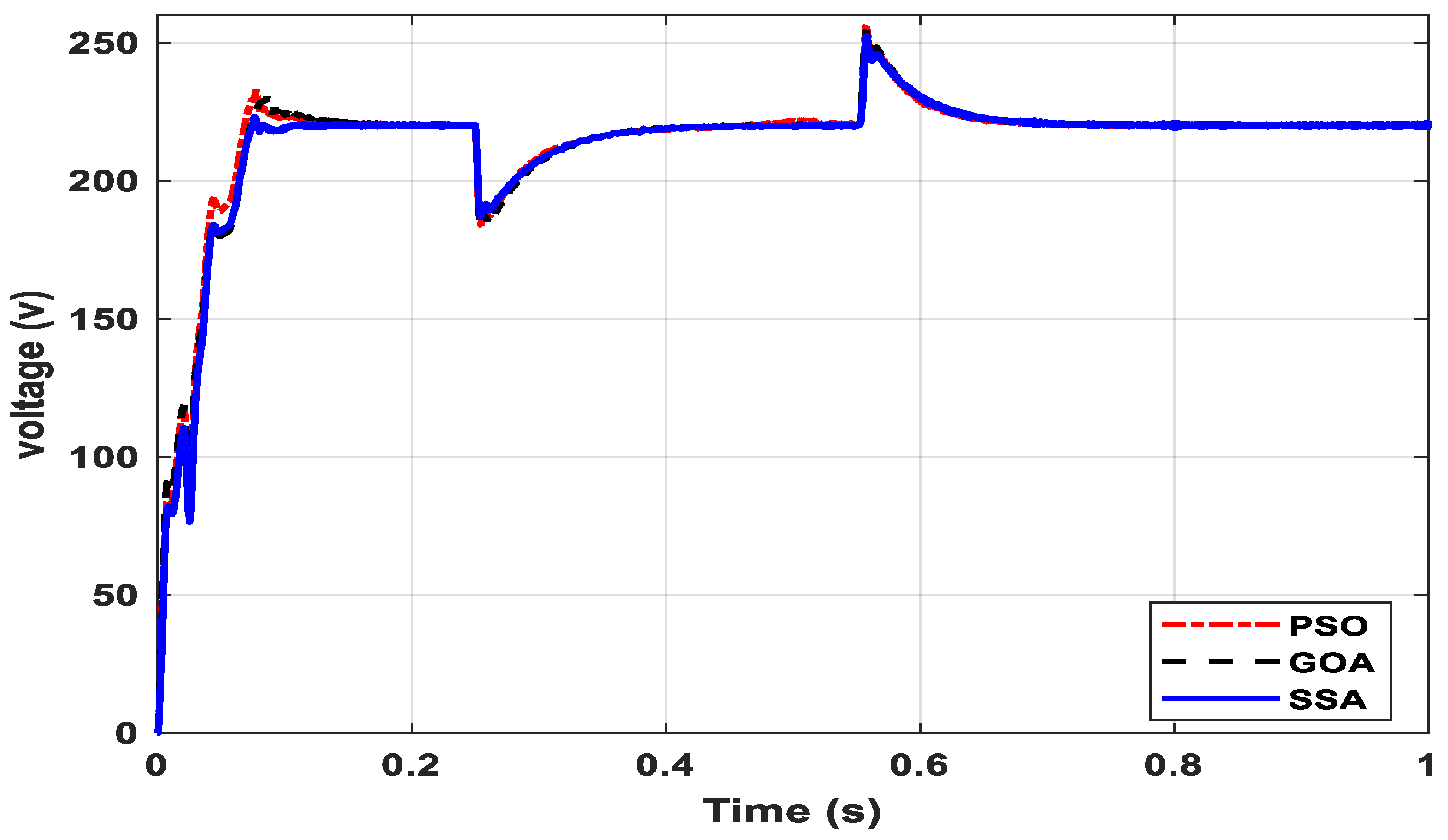
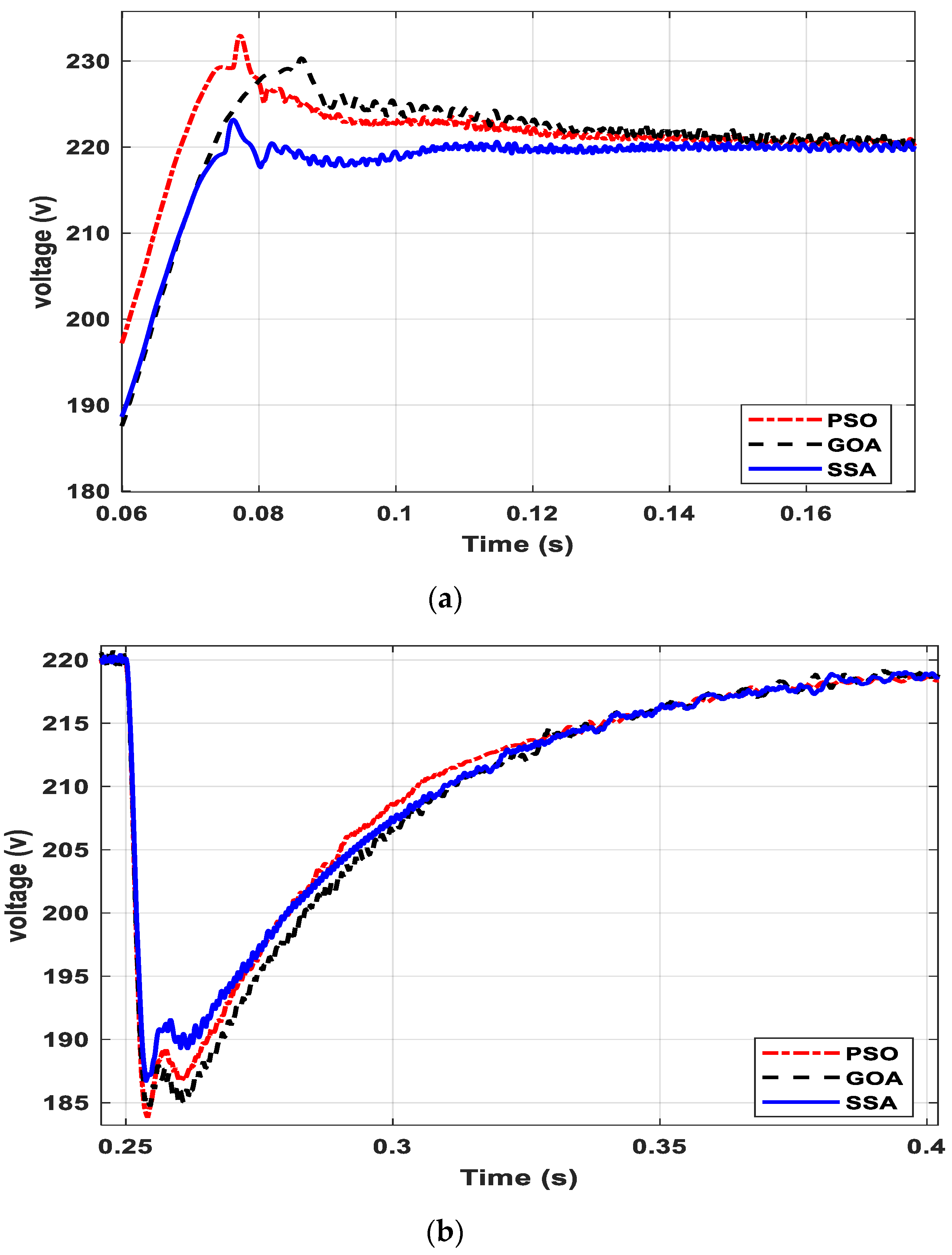
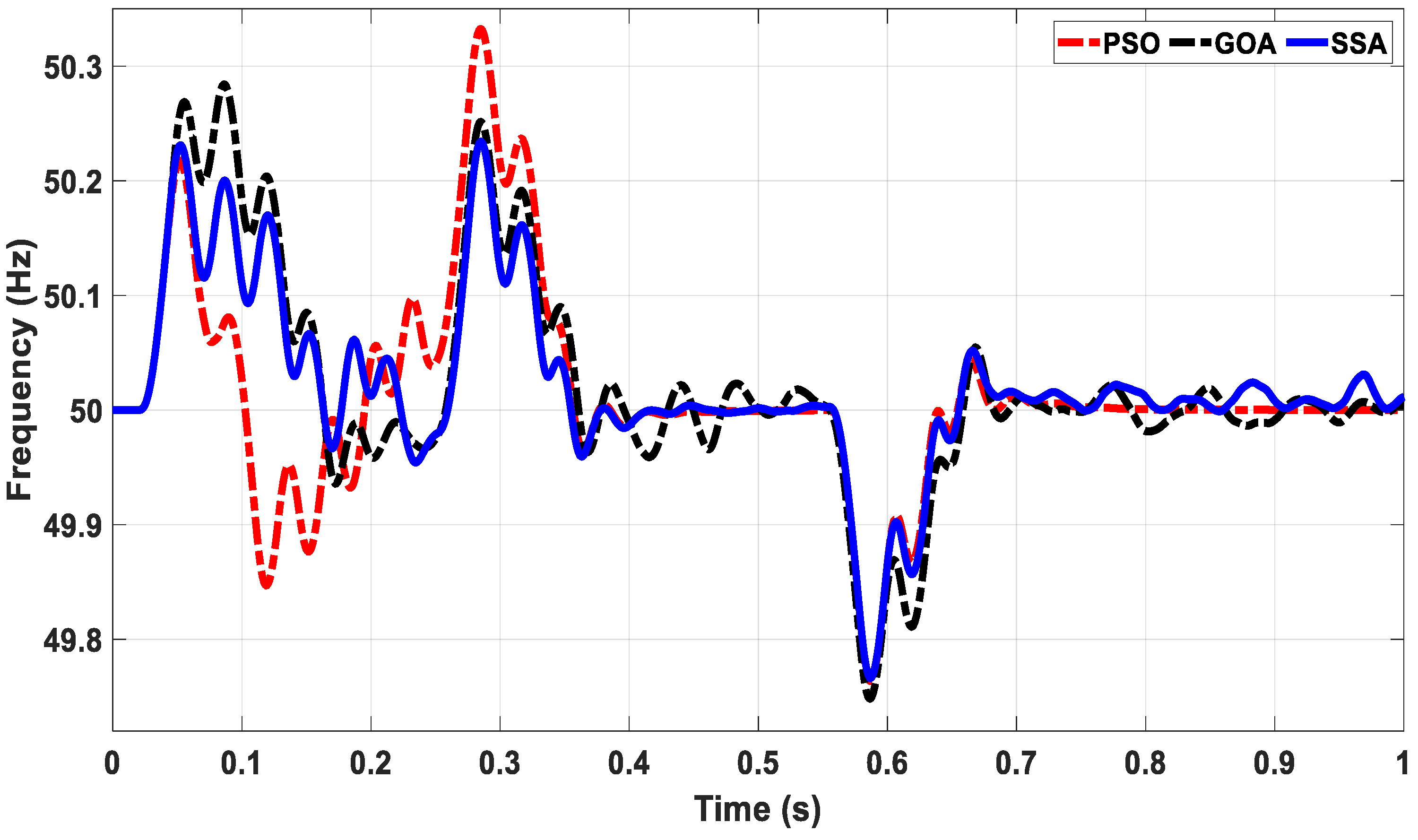
5.1. Voltage and Frequency Regulation during DG Insertion and Load Change
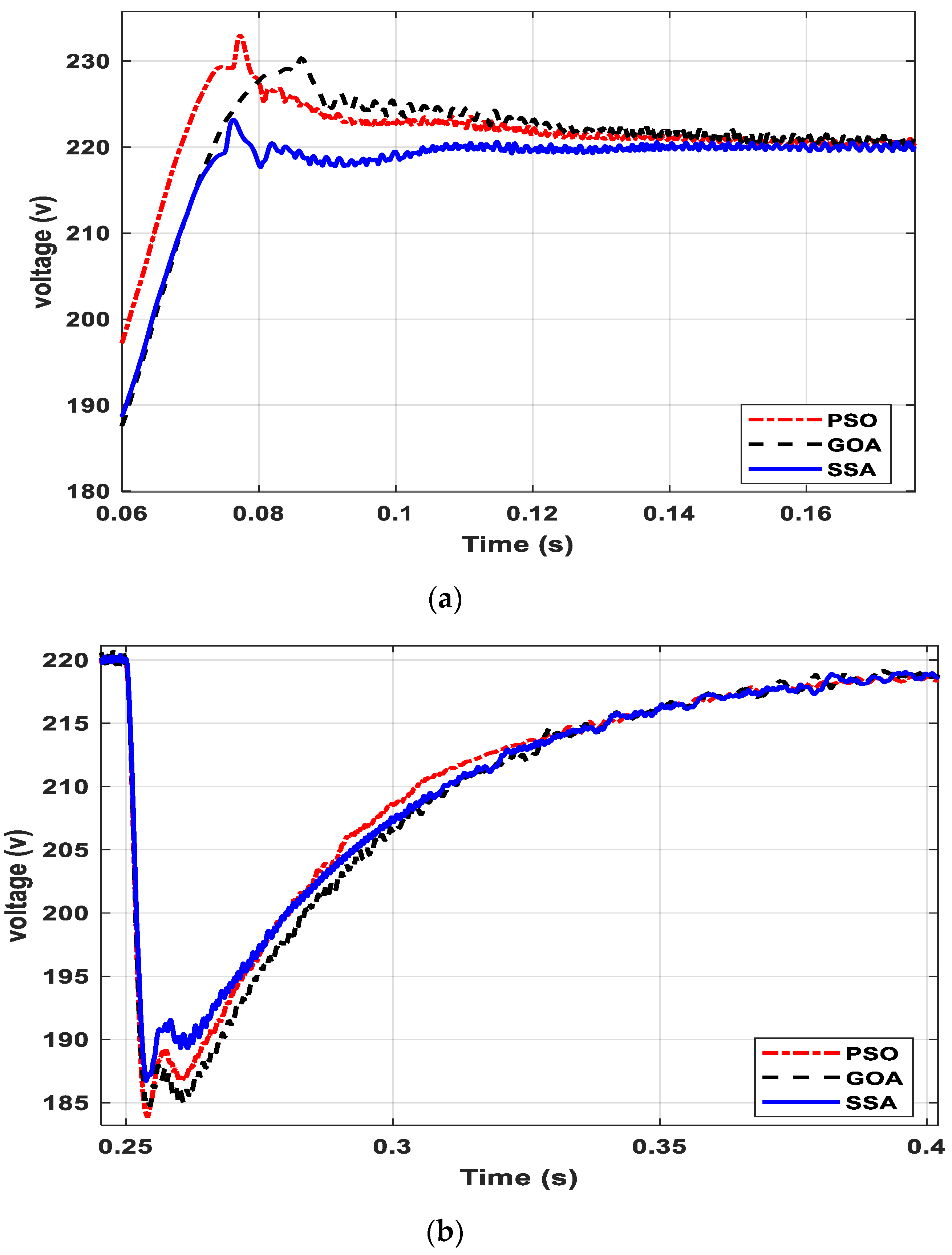
5.2. Performance Evaluation of Studied Optimization Algorithms
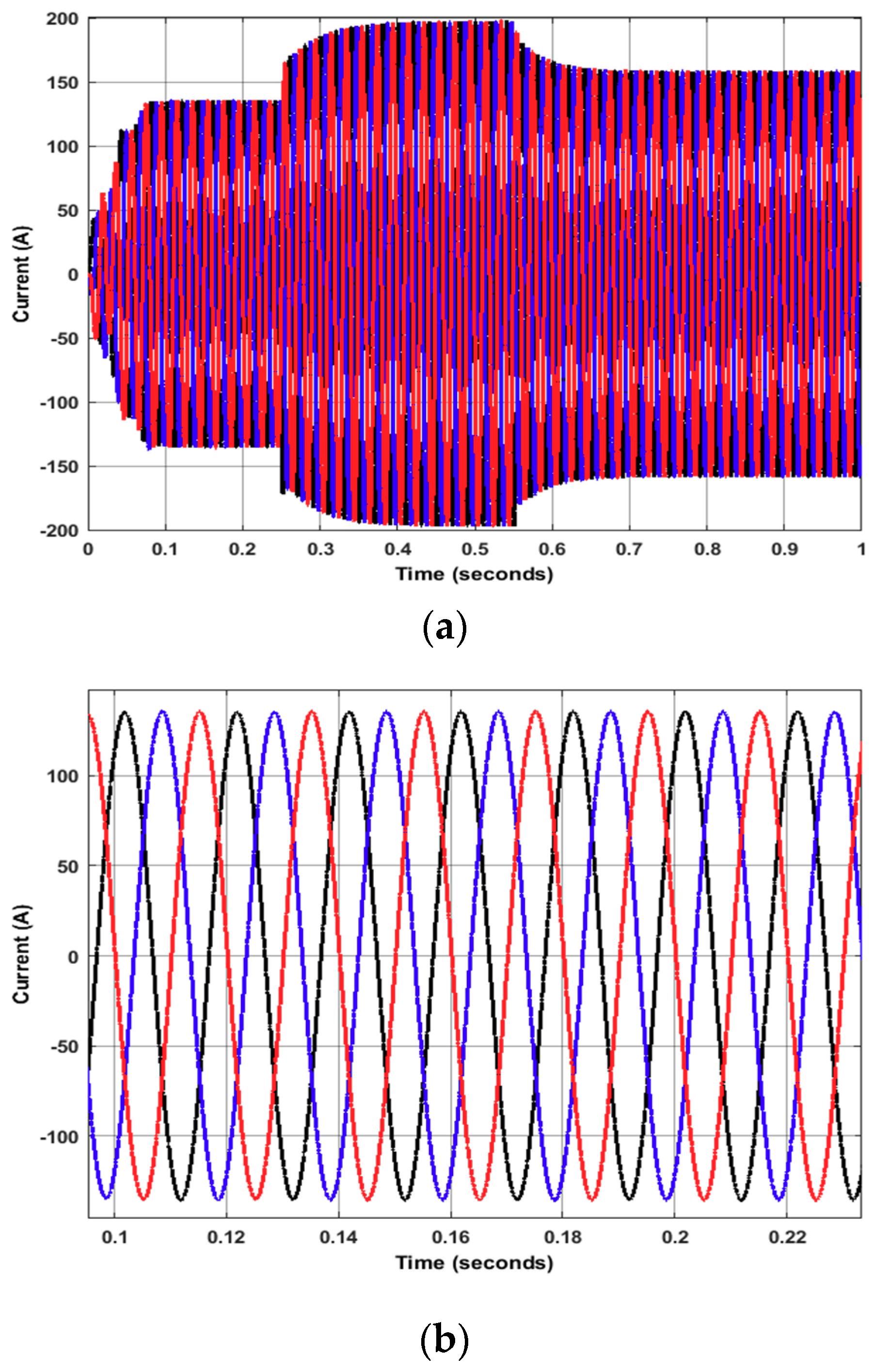
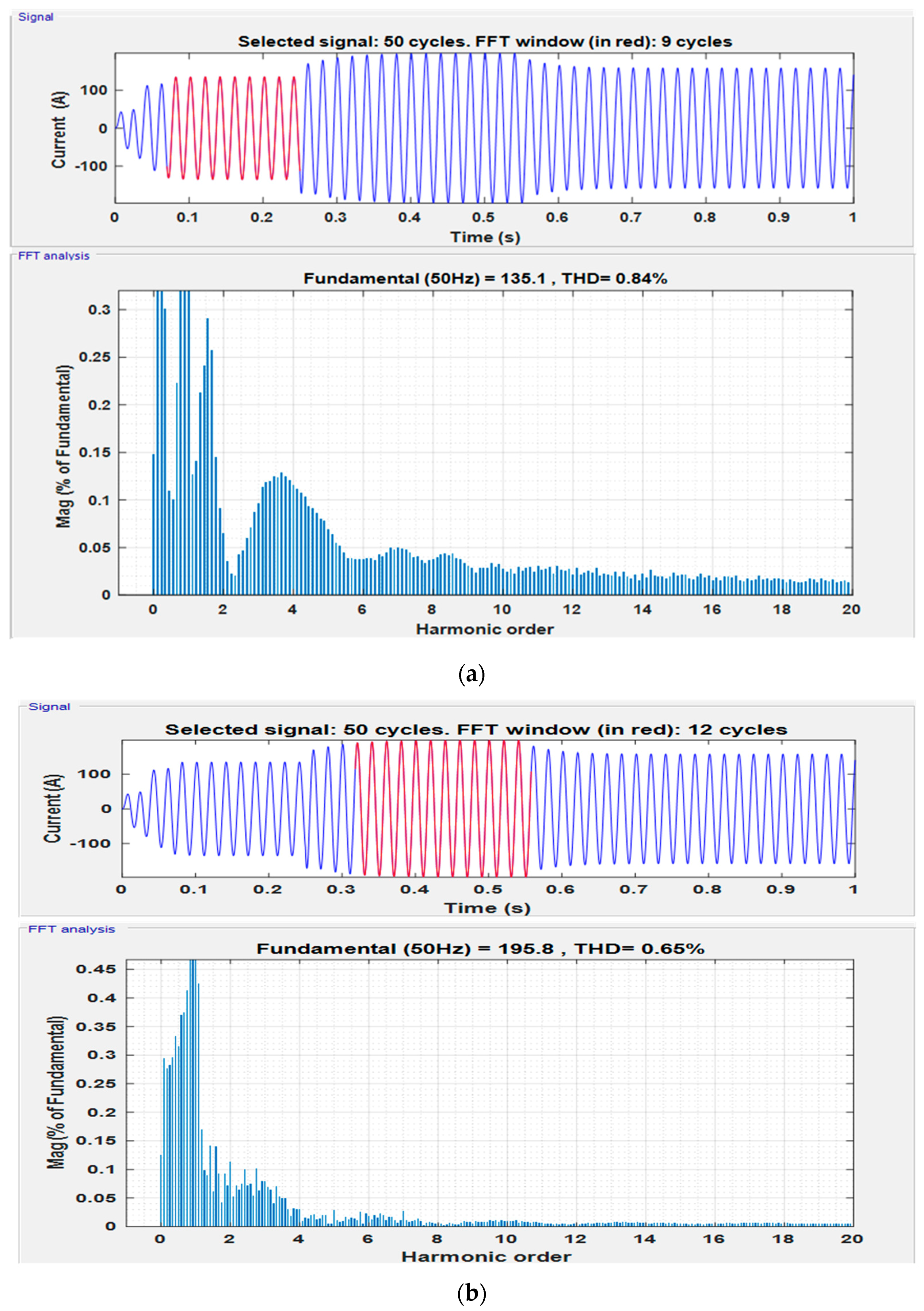
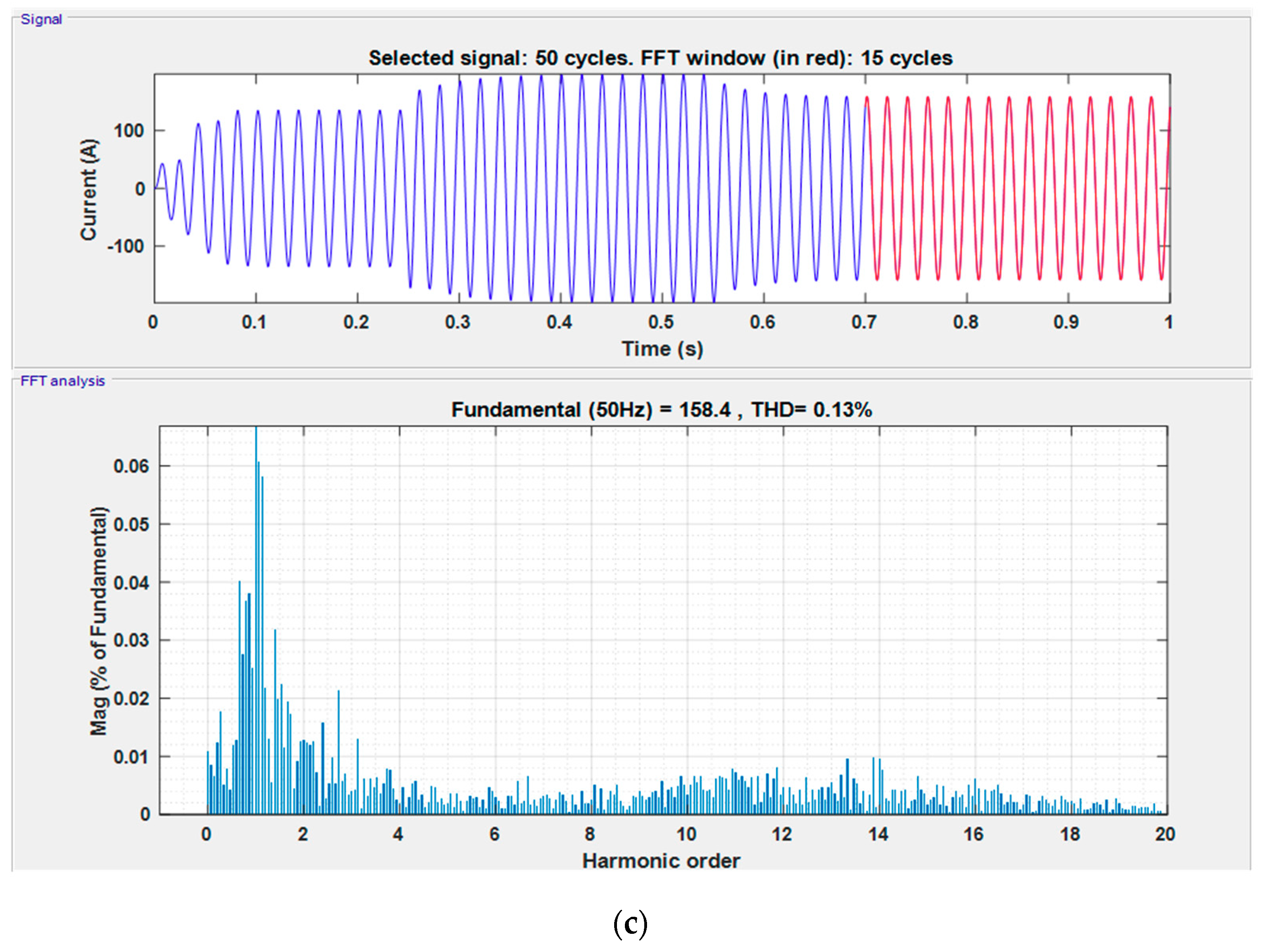
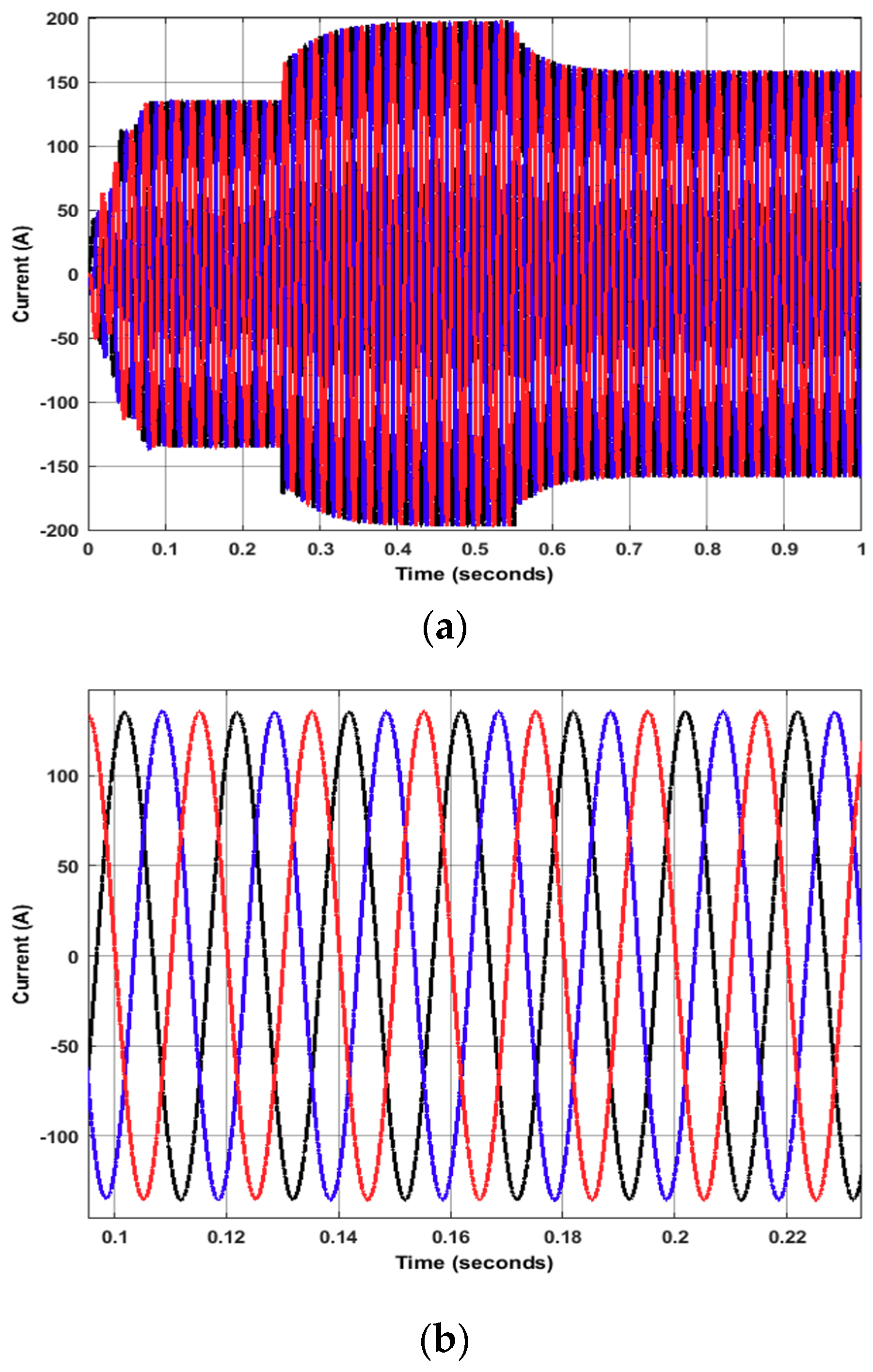
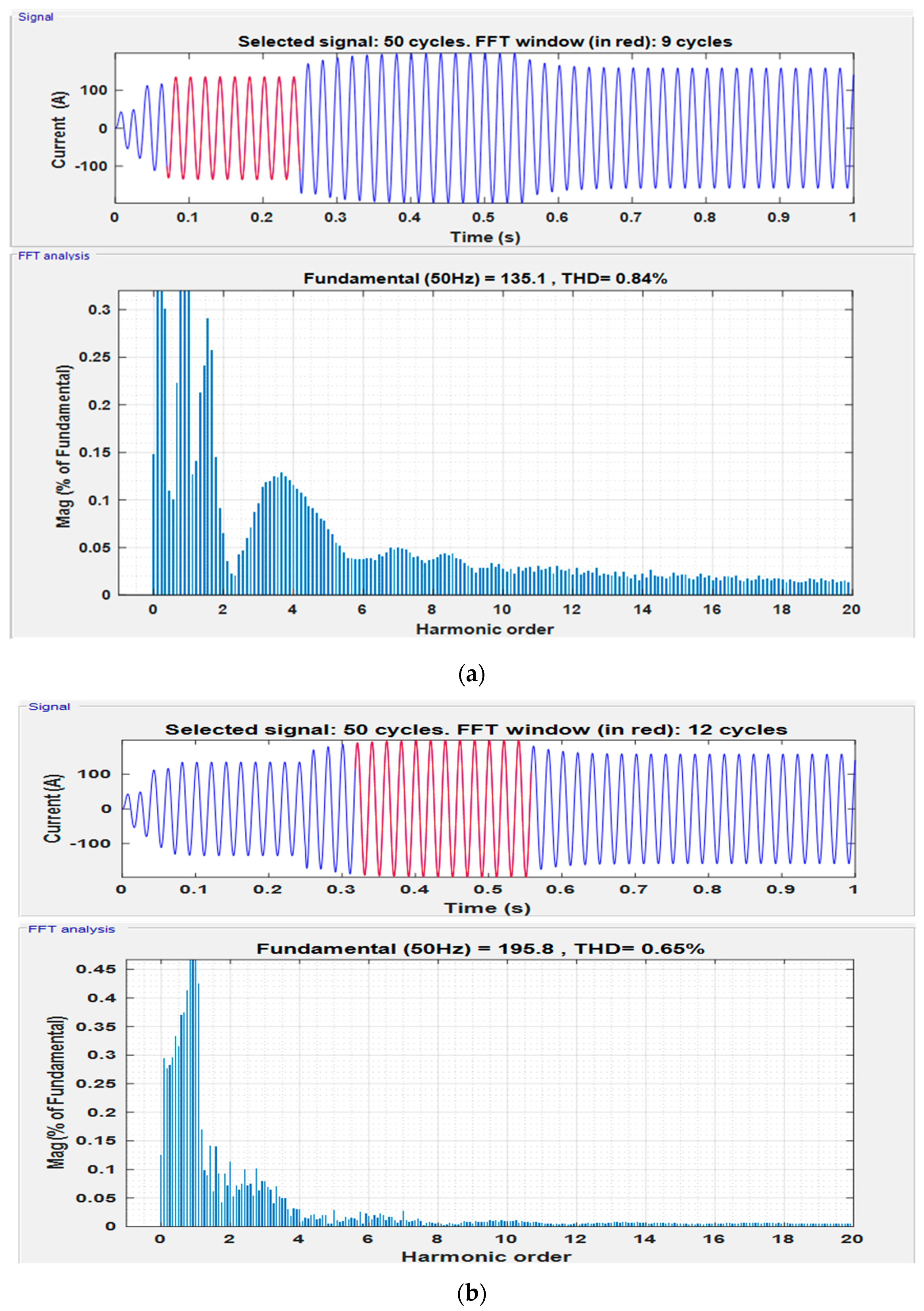
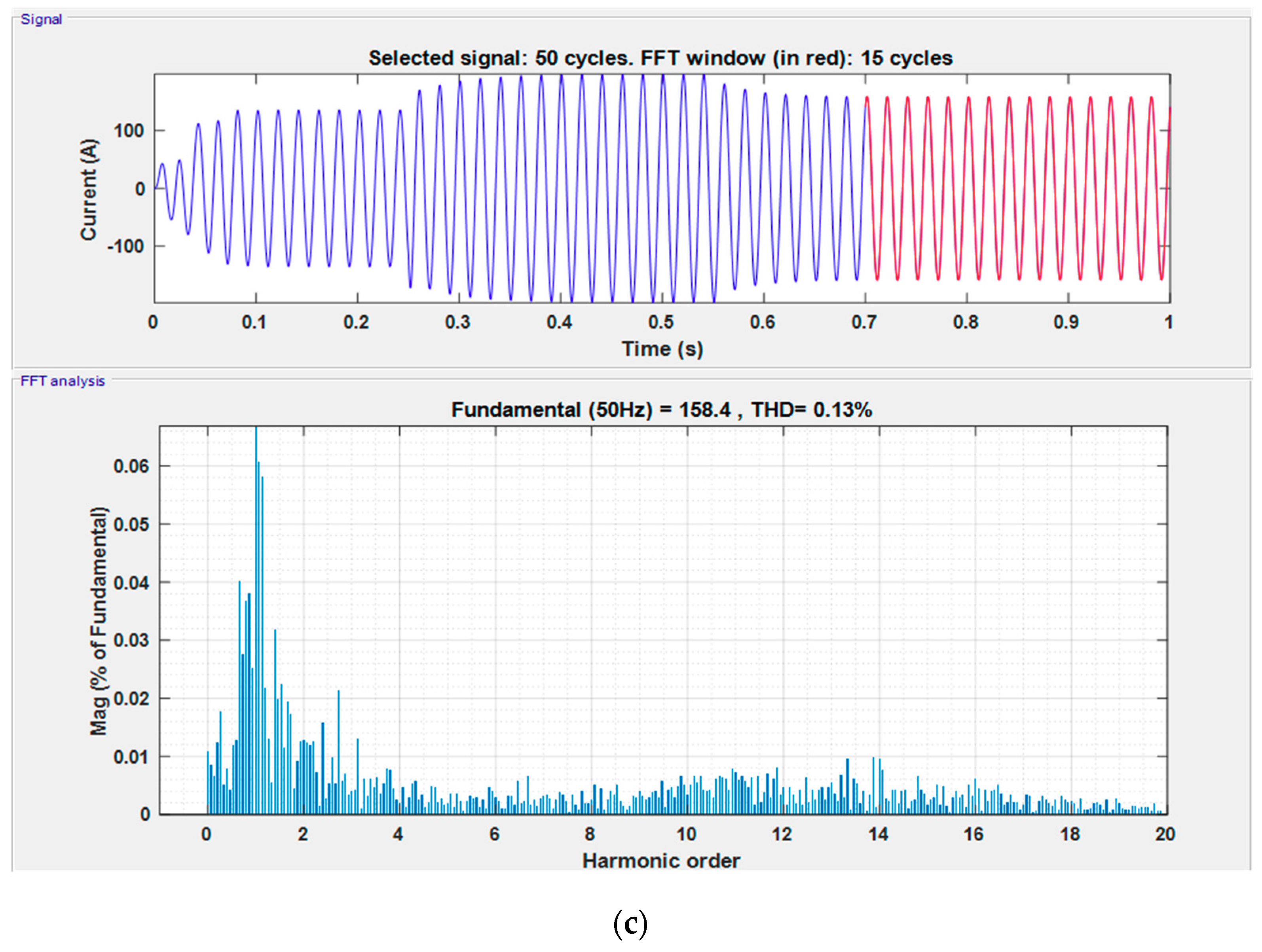
5.3. Power Quality Analysis
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
List of Symbols
| Symbol | Name |
| Low pass filter capacitance | |
| initial positions of the salps | |
| Position of leader salp | |
| Low pass filter inductance | |
| Location of the food source in the jth dimension | |
| Low pass filter resistance | |
| Grid voltage | |
| Frequency error | |
| Voltage error | |
| Reactive frequency | |
| Nominal frequency | |
| Three-phase current | |
| Direct reference current | |
| Quadrature reference current | |
| Droop constant for voltage | |
| Droop constant for frequency | |
| Lower bound of search boundary | |
| Upper bound of search boundary | |
| Reference voltage | |
| Three-phase voltage | |
| Direct reference voltage | |
| Nominal or rated voltage | |
| Quadrature reference voltage | |
| , | Reference voltage in αβ frame |
| a | Acceleration of the leading salp |
| i | Salp number |
| C | dc-link capacitance |
| c1, c2, c3 | Random numbers |
| Kpf, Kif | Gains for the lower arm PI controller |
| Kpv, Kiv | Gains for the upper arm PI controller |
| l | Number of iterations |
| L | Number of maximum iterations |
| M | Food source position |
| Ɵ | Reference angel |
| p | Active power |
| q | Reactive power |
| rand | Random number |
| t | Total simulation time |
| Angular frequency | |
| Filter cut-off frequency | |
| Initial velocity of leading salp |
References
- Hatziargyriou, N. Microgrids: Architectures and Control; John Wiley & Sons: Chichester, UK, 2014. [Google Scholar]
- Jumani, T.A.; Mustafa, M.W.; Rasid, M.M.; Mirjat, N.H.; Baloch, M.H.; Salisu, S. Optimal Power Flow Controller for Grid-Connected Microgrids using Grasshopper Optimization Algorithm. Electronics 2019, 8, 111. [Google Scholar] [CrossRef]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp Swarm Algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Abbassi, R.; Abbassi, A.; Heidari, A.A.; Mirjalili, S. An efficient salp swarm-inspired algorithm for parameters identification of photovoltaic cell models. Energy Convers. Manag. 2019, 179, 362–372. [Google Scholar] [CrossRef]
- Tolba, M.; Rezk, H.; Diab, A.; Al-Dhaifallah, M. A novel robust methodology based Salp swarm algorithm for allocation and capacity of renewable distributed generators on distribution grids. Energies 2018, 11, 2556. [Google Scholar] [CrossRef]
- El-Fergany, A.A. Extracting optimal parameters of PEM fuel cells using Salp Swarm Optimizer. Renew. Energy 2018, 119, 641–648. [Google Scholar] [CrossRef]
- Abusnaina, A.A.; Ahmad, S.; Jarrar, R.; Mafarja, M. Training neural networks using salp swarm algorithm for pattern classification. In Proceedings of the 2nd International Conference on Future Networks and Distributed Systems, Amman, Jordan, 26–27 June 2018; p. 17. [Google Scholar]
- Kumari, S.; Shankar, G. A Novel Application of Salp Swarm Algorithm in Load Frequency Control of Multi-Area Power System. In Proceedings of the 2018 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Chennai, India, 18–21 December 2018; pp. 1–5. [Google Scholar]
- Al-Saedi, W.; Lachowicz, S.W.; Habibi, D.; Bass, O. Voltage and frequency regulation based DG unit in an autonomous microgrid operation using Particle Swarm Optimization. Int. J. Electr. Power Energy Syst. 2013, 53, 742–751. [Google Scholar] [CrossRef]
- Vinayagam, A.; Alqumsan, A.A.; Swarna, K.; Khoo, S.Y.; Stojcevski, A. Intelligent control strategy in the islanded network of a solar PV microgrid. Electr. Power Syst. Res. 2018, 155, 93–103. [Google Scholar] [CrossRef]
- Moarref, A.E.; Sedighizadeh, M.; Esmaili, M. Multi-objective voltage and frequency regulation in autonomous microgrids using Pareto-based Big Bang-Big Crunch algorithm. Control Eng. Pract. 2016, 55, 56–68. [Google Scholar] [CrossRef]
- Sedighizadeh, M.; Esmaili, M.; Eisapour-Moarref, A. Voltage and frequency regulation in autonomous microgrids using Hybrid Big Bang-Big Crunch algorithm. Appl. Soft Comput. 2017, 52, 176–189. [Google Scholar] [CrossRef]
- Qazi, S.H.; Mustafa, M.W.; Sultana, U.; Mirjat, N.H.; Soomro, S.A.; Rasheed, N. Regulation of Voltage and Frequency in Solid Oxide Fuel Cell-Based Autonomous Microgrids Using the Whales Optimisation Algorithm. Energies 2018, 11, 1318. [Google Scholar] [CrossRef]
- Jumani, T.A.; Mustafa, M.W.; Rasid, M.M.; Mirjat, N.H.; Leghari, Z.H.; Saeed, M.S. Optimal Voltage and Frequency Control of an Islanded Microgrid using Grasshopper Optimization Algorithm. Energies 2018, 11, 3191. [Google Scholar] [CrossRef]
- Killingsworth, N.; Krstic, M. Auto-tuning of PID controllers via extremum seeking. In Proceedings of the American Control Conference, Portland, OR, USA, 8–10 June 2005; pp. 2251–2256. [Google Scholar]
- Seborg, D.E.; Edger, T.F.; Mellichamp, D.A. Process Dynamics and Control, 2nd ed.; John Wiley & Sons: Chichester, UK, 2004. [Google Scholar]
- Association, I.S. IEEE 1547 Standard for Interconnecting Distributed Resources with Electric Power Systems; IEEE Standards Association: Piscataway, NJ, USA, 2003. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Solar PV rating | Ps | 150 kW |
| Filter capacitance | Cf | 2.5 mF |
| Filter inductance | Lf | 95 mH |
| Switching frequency | fsw | 10 kHz |
| Sampling frequency | fs | 500 kHz |
| Load 1 | Pl, Q1 | 50 kW, 30 kVAR |
| Load 2 | P2, Q2 | 40 kW, 20 kVAR |
| Load 3 | P3, Q3 | 40 kW, 20 kVAR |
| Optimization | Kpv | Kiv | Kpf | Kif | C (mF) |
|---|---|---|---|---|---|
| PSO | 0.2571093 | 25.6392019 | 0.9374905 | 9.3847852 | 23.817 |
| GOA | 0.9441557 | 12.8365850 | 26.768654 | 1.2474575 | 17.458 |
| SSA | 1.5485963 | 0.87302975 | 2.1385992 | 15.583932 | 19.954 |
| Studied Condition | Method | Maximum Overshoot/Undershoot (%) | Peak Time (ms) | Settling Time (ms) | |
|---|---|---|---|---|---|
| Voltage | MG insertion | PSO | 5.86 | 27.2 | 37.7 |
| GOA | 4.68 | 36.3 | 64.5 | ||
| SSA | 1.45 | 26.2 | 26.36 | ||
| Load injection | PSO | 16.45 | 4.00 | 94.21 | |
| GOA | 16.00 | 4.70 | 94.20 | ||
| SSA | 15.04 | 3.90 | 94.19 | ||
| Load detachment | PSO | 16.41 | 7.70 | 73.50 | |
| GOA | 15.59 | 7.50 | 78.50 | ||
| SSA | 14.77 | 7.80 | 77.40 | ||
| Frequency | MG injection | PSO | 0.44 | 2.05 | - |
| GOA | 0.54 | 5.58 | - | ||
| SSA | 0.46 | 2.30 | - | ||
| Load injection | PSO | 0.66 | 35.2 | - | |
| GOA | 0.50 | 34.8 | - | ||
| SSA | 0.46 | 35.0 | - | ||
| Load detachment | PSO | 0.50 | 36.4 | - | |
| GOA | 0.48 | 36.7 | - | ||
| SSA | 0.46 | 36.8 | - |
| Operating Condition | Percentage Harmonics (%) |
|---|---|
| MG injection | 0.84 |
| Load injection | 0.65 |
| Load detachment | 0.13 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jumani, T.A.; Mustafa, M.W.; Md. Rasid, M.; Anjum, W.; Ayub, S. Salp Swarm Optimization Algorithm-Based Controller for Dynamic Response and Power Quality Enhancement of an Islanded Microgrid. Processes 2019, 7, 840. https://doi.org/10.3390/pr7110840
Jumani TA, Mustafa MW, Md. Rasid M, Anjum W, Ayub S. Salp Swarm Optimization Algorithm-Based Controller for Dynamic Response and Power Quality Enhancement of an Islanded Microgrid. Processes. 2019; 7(11):840. https://doi.org/10.3390/pr7110840
Chicago/Turabian StyleJumani, Touqeer Ahmed, Mohd. Wazir Mustafa, Madihah Md. Rasid, Waqas Anjum, and Sara Ayub. 2019. "Salp Swarm Optimization Algorithm-Based Controller for Dynamic Response and Power Quality Enhancement of an Islanded Microgrid" Processes 7, no. 11: 840. https://doi.org/10.3390/pr7110840
APA StyleJumani, T. A., Mustafa, M. W., Md. Rasid, M., Anjum, W., & Ayub, S. (2019). Salp Swarm Optimization Algorithm-Based Controller for Dynamic Response and Power Quality Enhancement of an Islanded Microgrid. Processes, 7(11), 840. https://doi.org/10.3390/pr7110840