Numerical Simulations of Dynamic Pipeline-Vessel Response on a Deepwater S-Laying Vessel

Abstract
1. Introduction
2. Materials and Methods
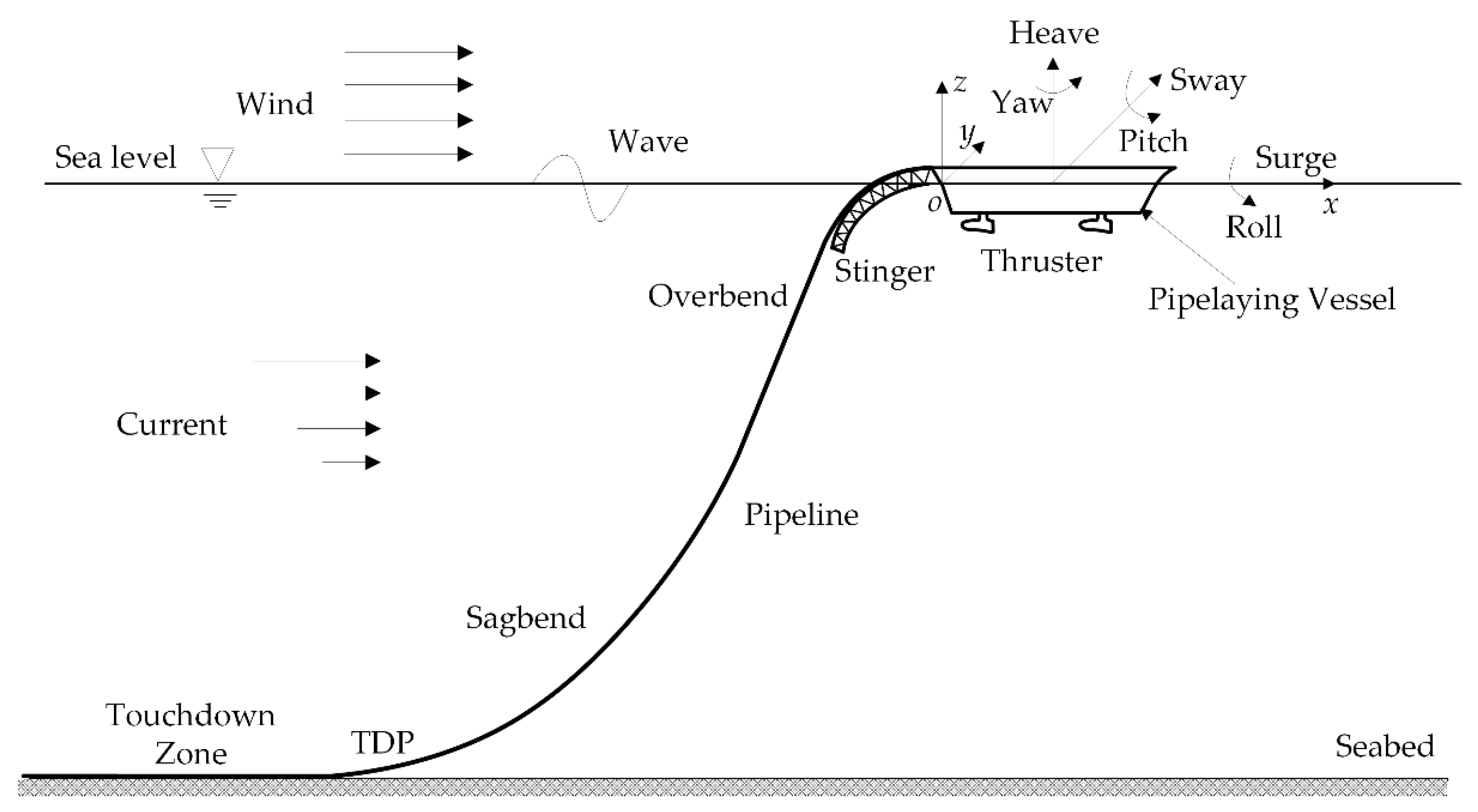
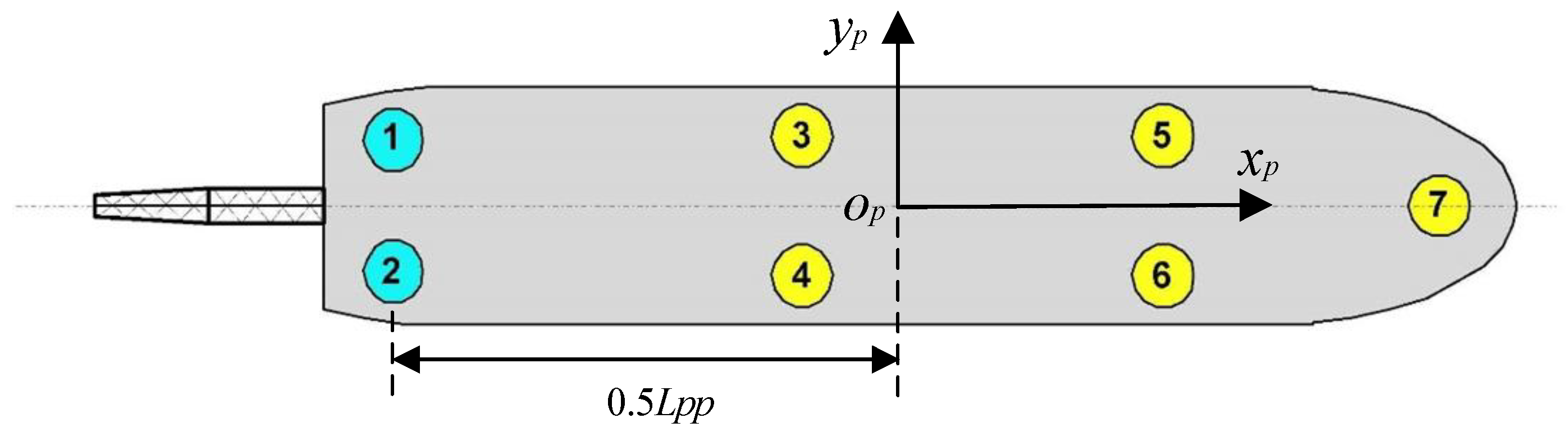
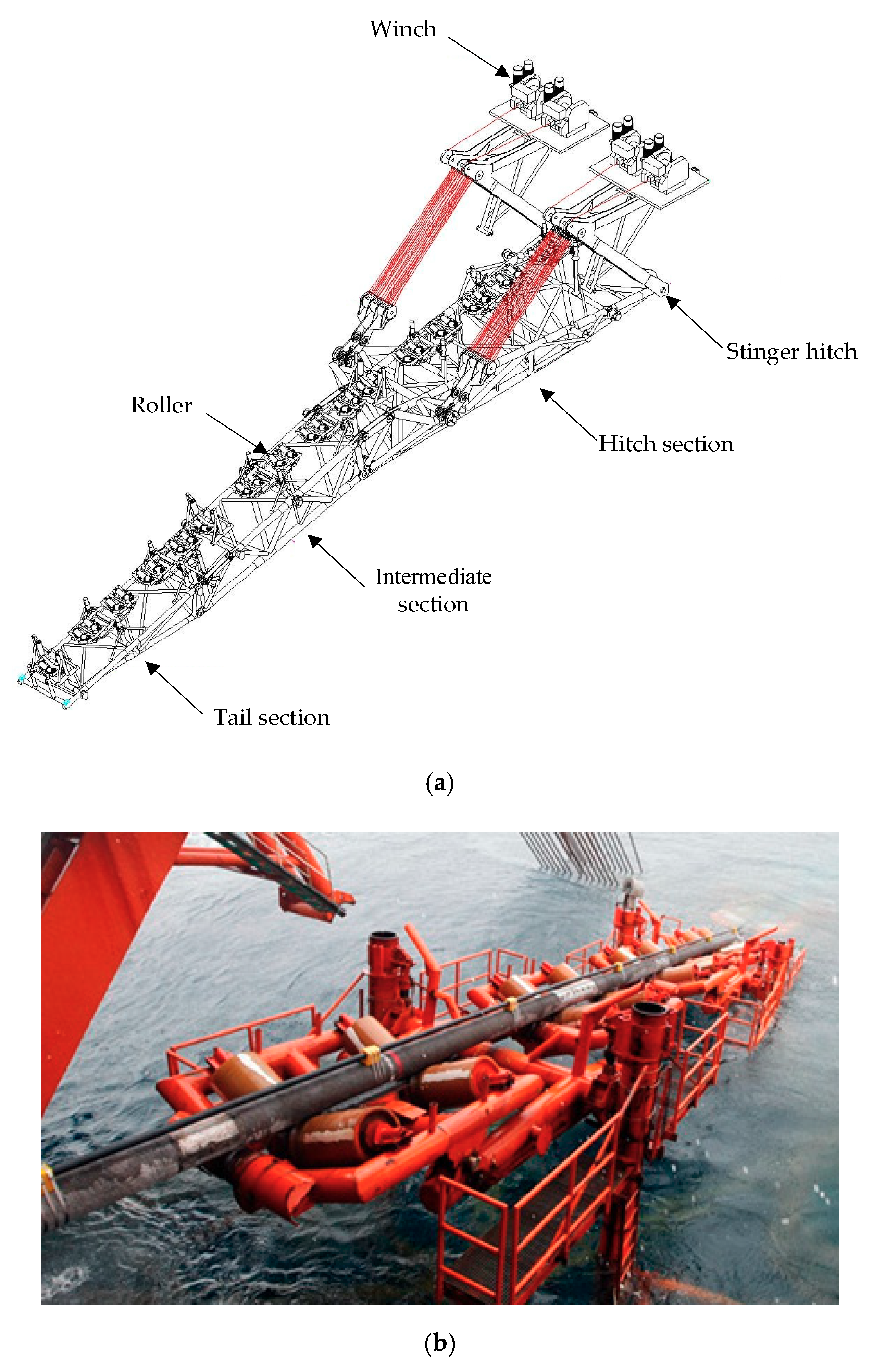
2.1. S-Laying Vessel Description
2.2. Equations for Coupled Motion
2.3. Environmental Forces
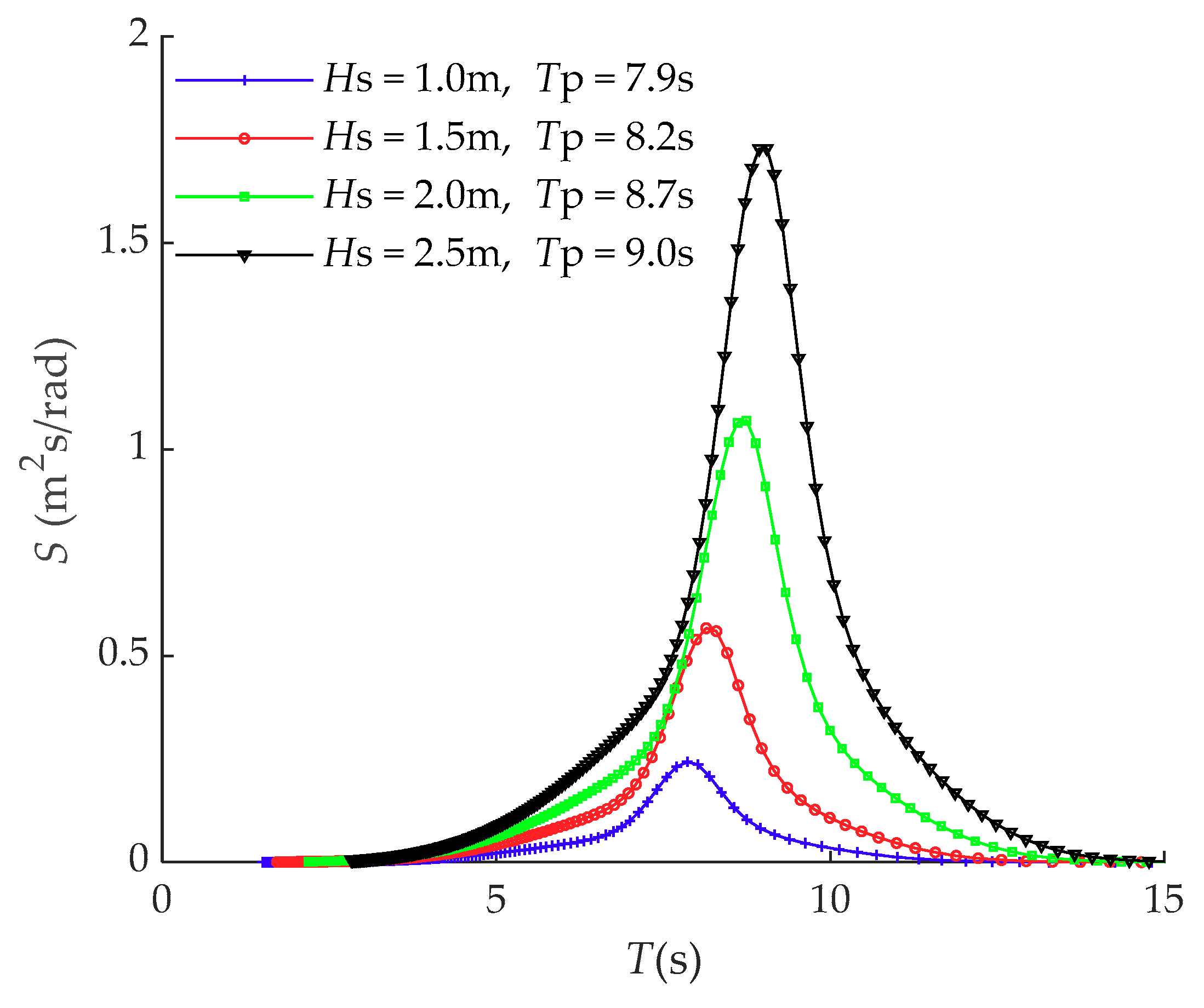
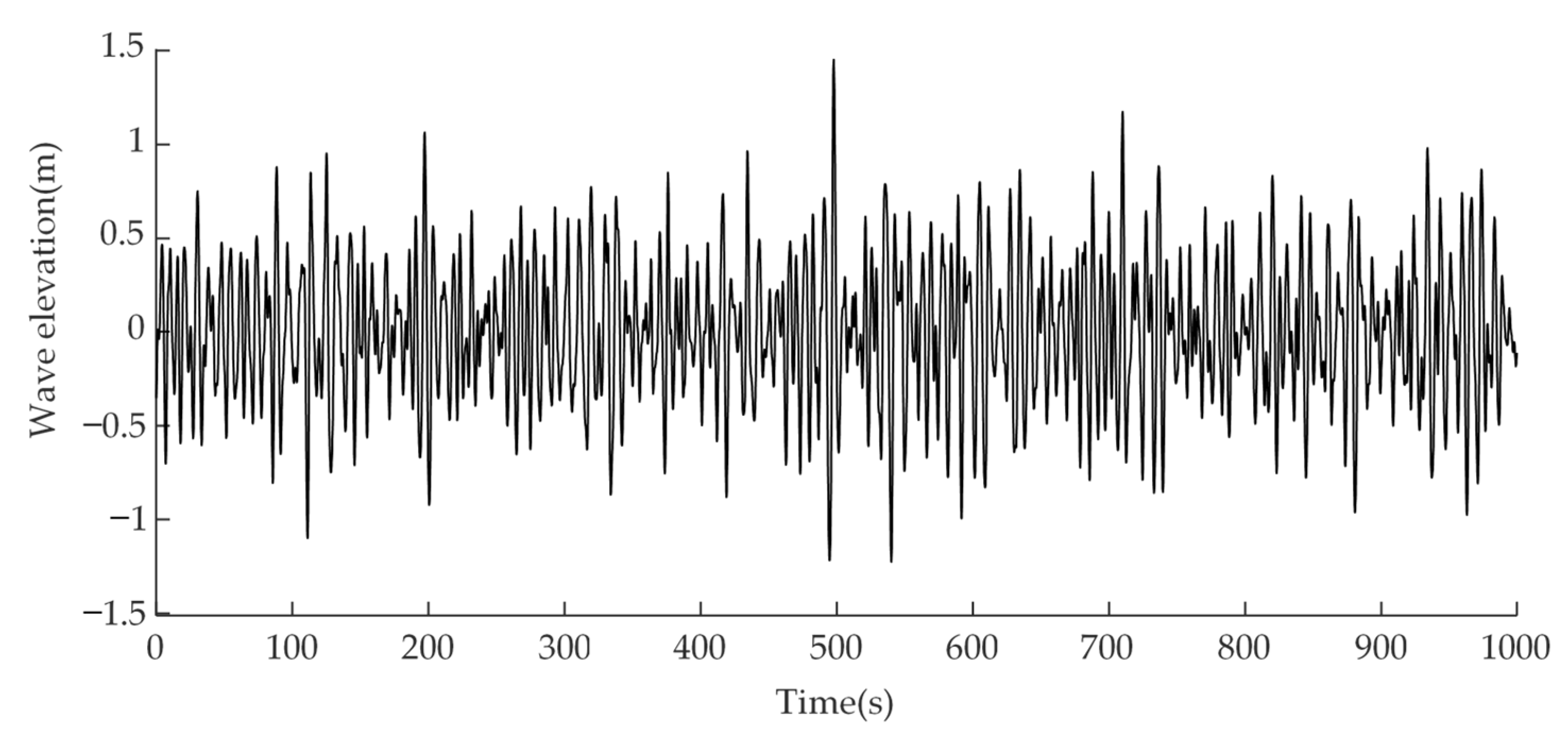
2.3.1. Wave Forces
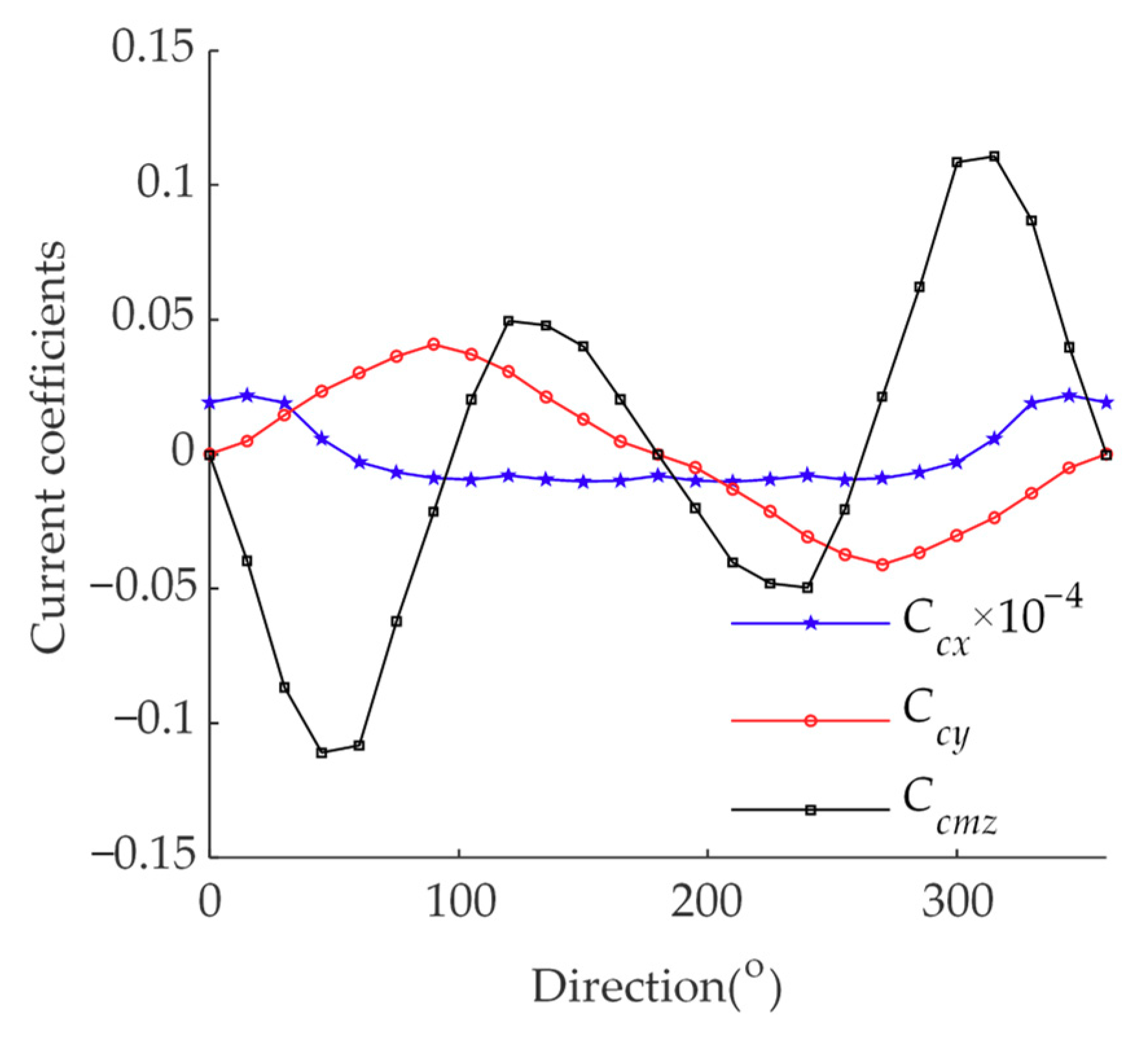
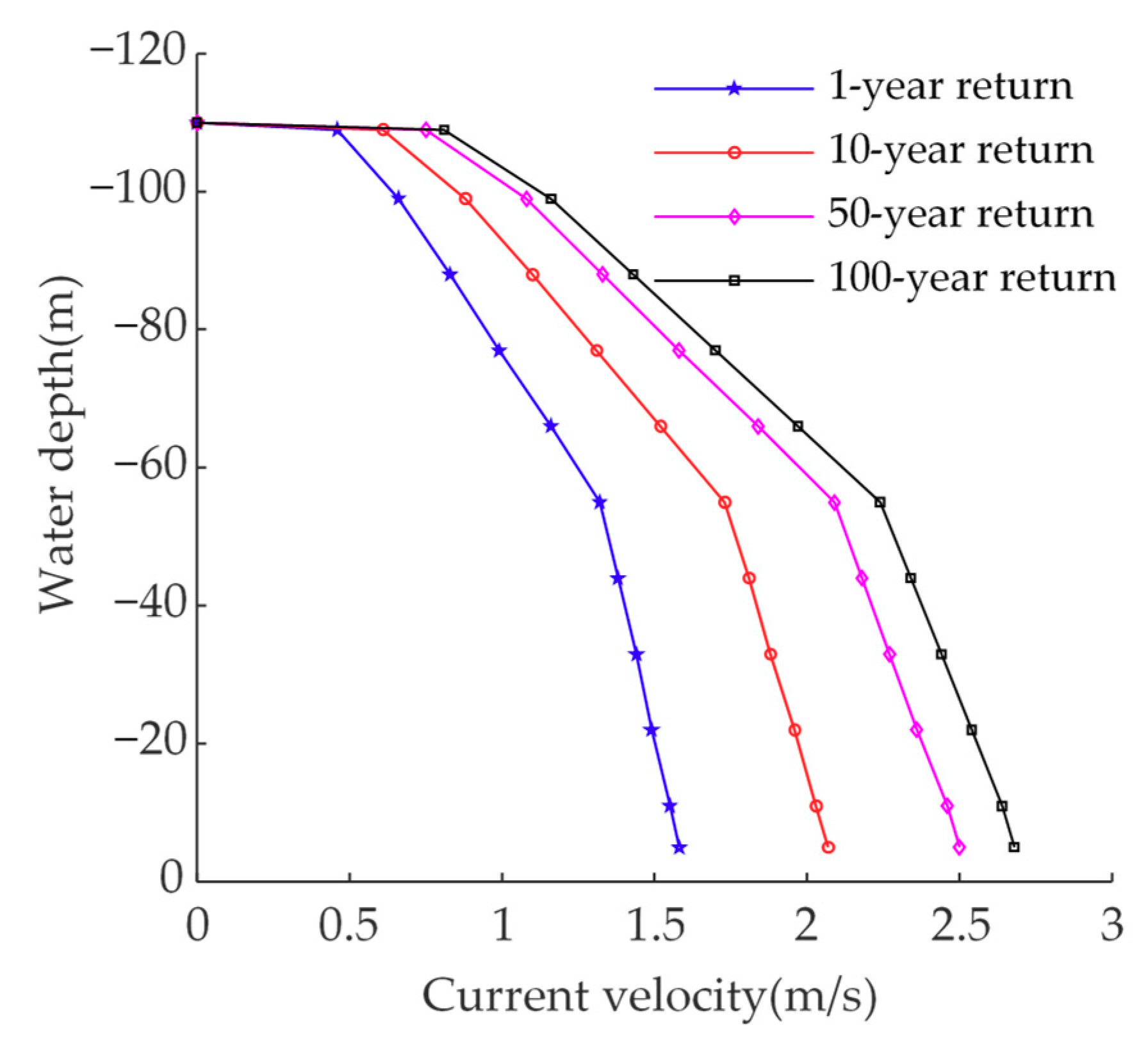
2.3.2. Current Forces
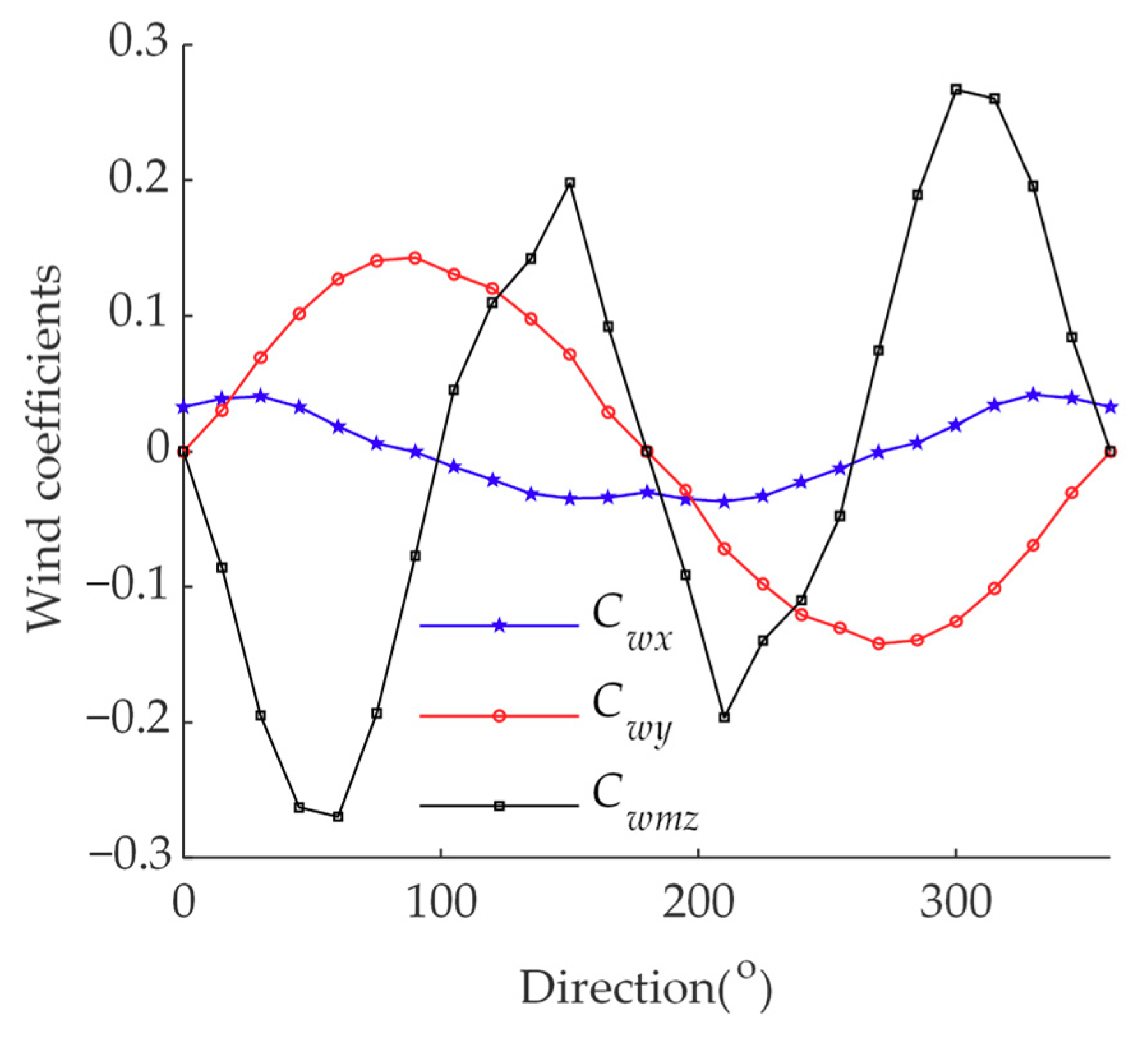
2.3.3. Wind Forces
2.4. Dynamic Positioning System Control Model
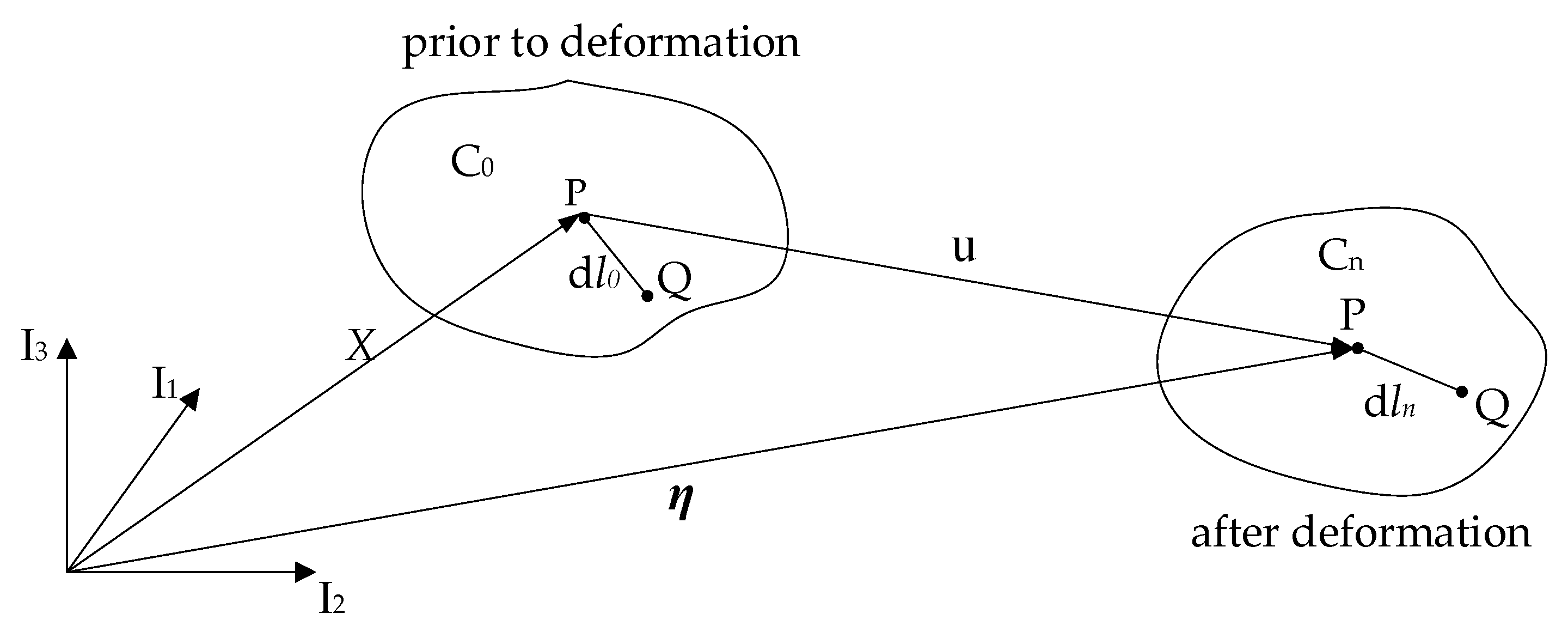
2.5. Pipeline Dynamics: Model Theory
2.5.1. Pipeline Model
2.5.2. Hydrodynamic Forces Acting on the Pipeline
2.6. Roller: Simplifying Assumptions
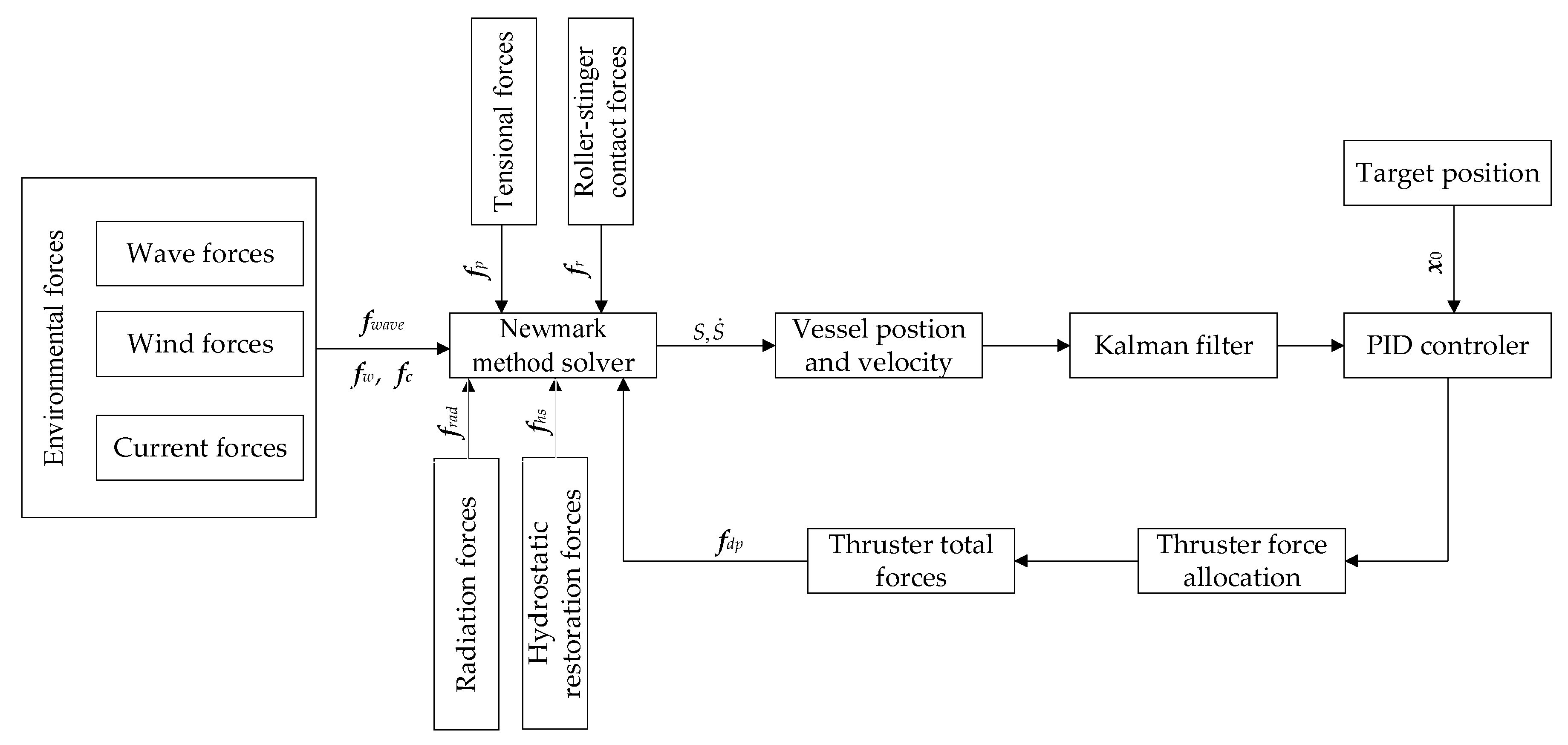
3. Model Solution
4. Results and Discussion
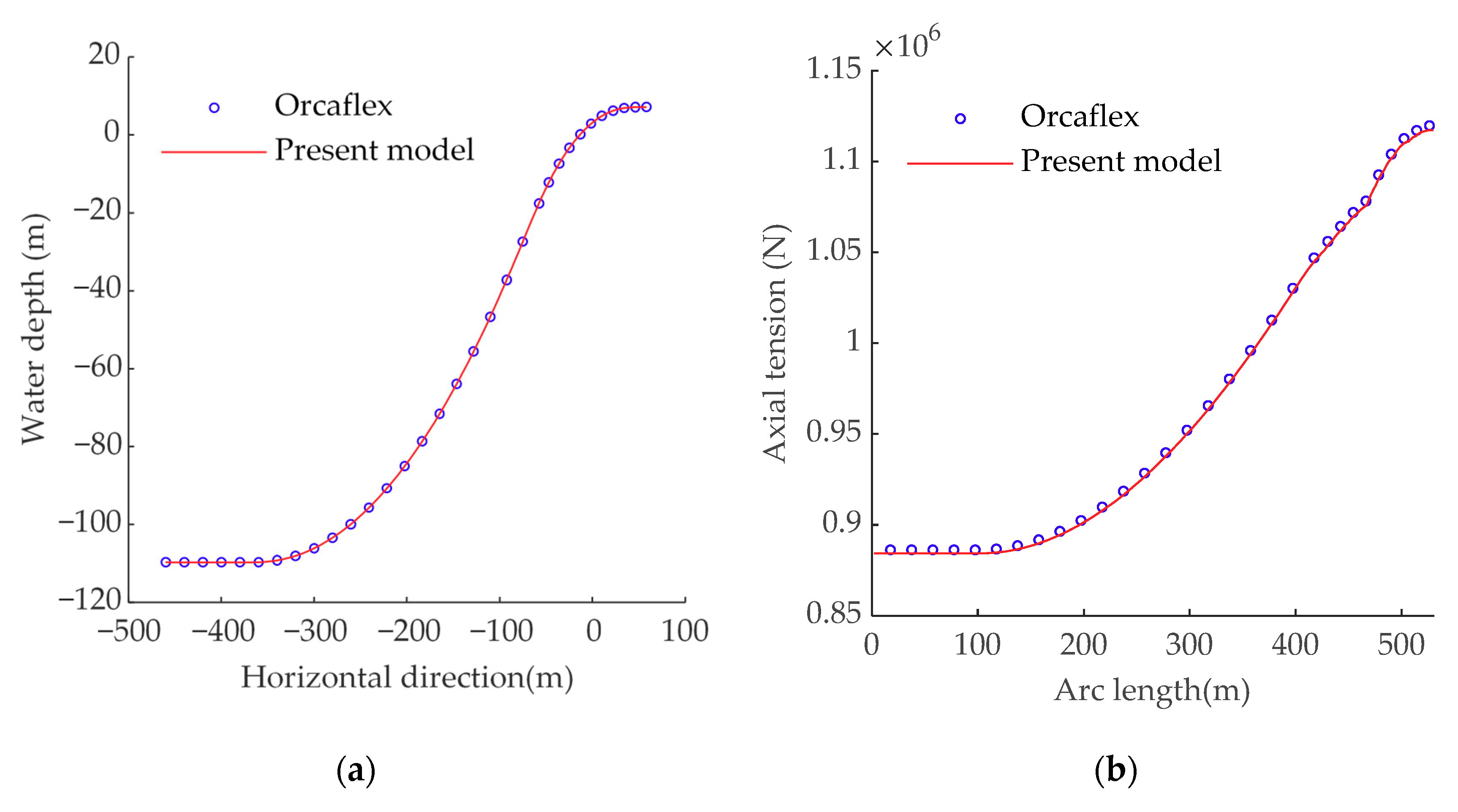
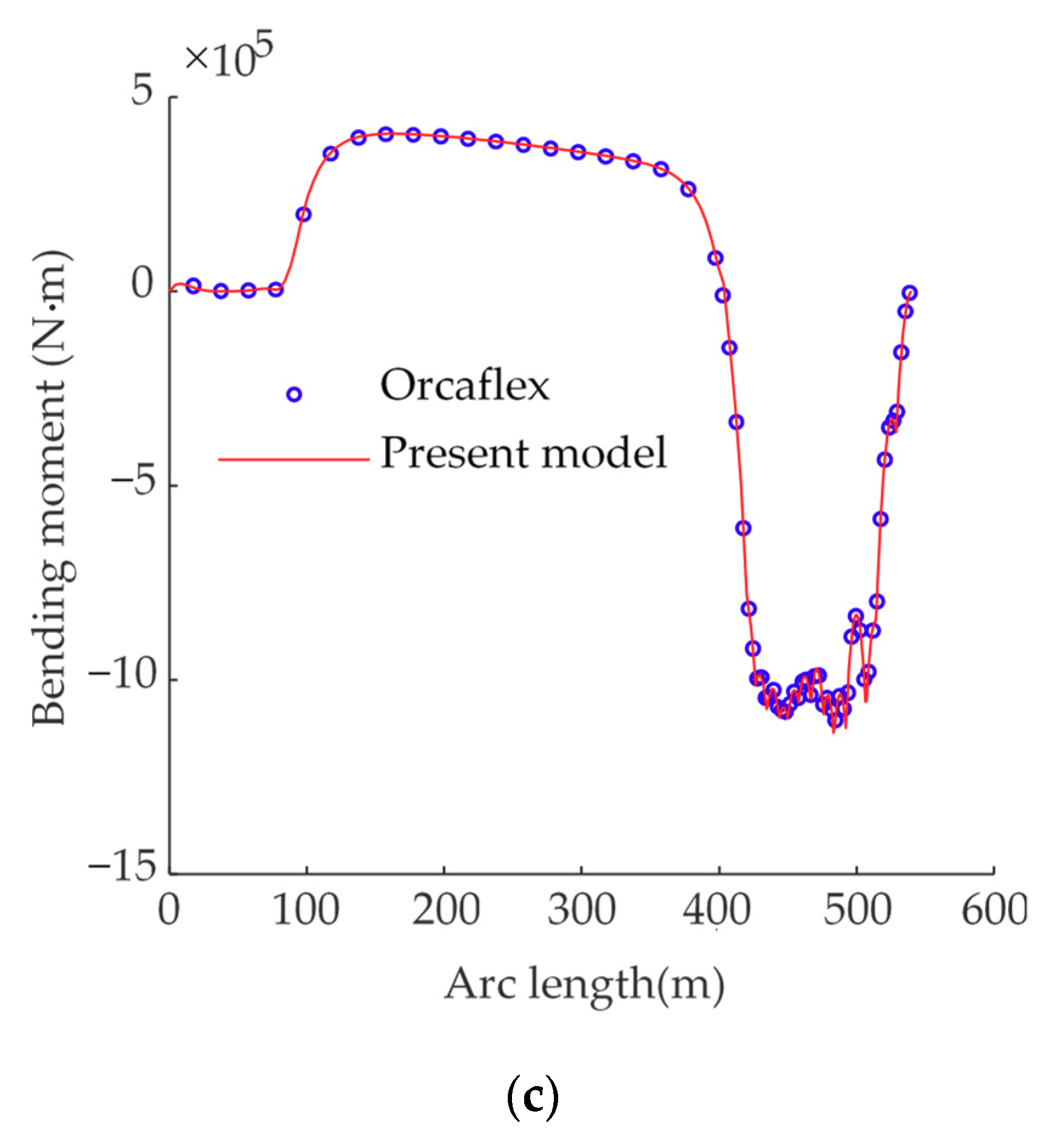
4.1. Verification and Comparison
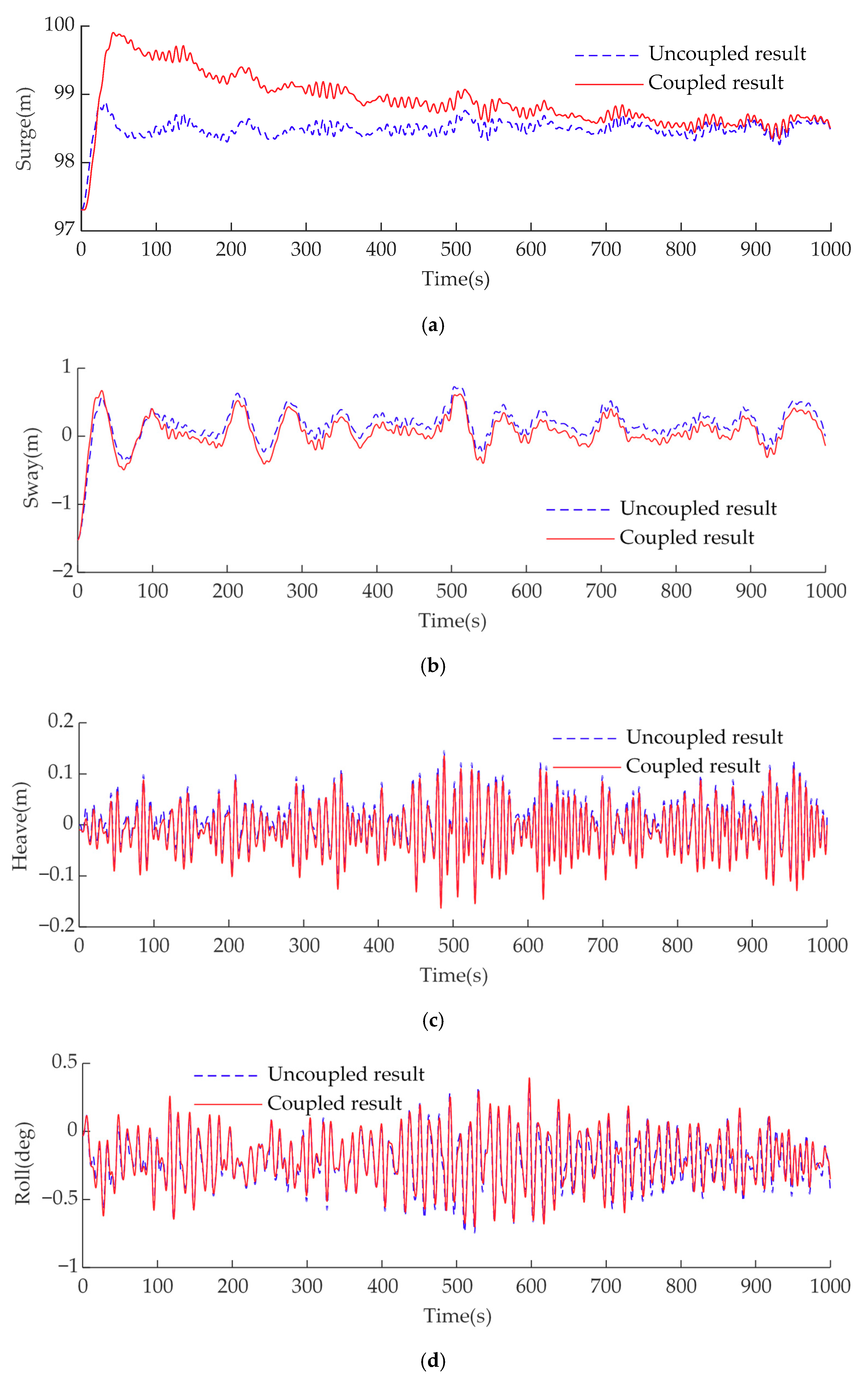
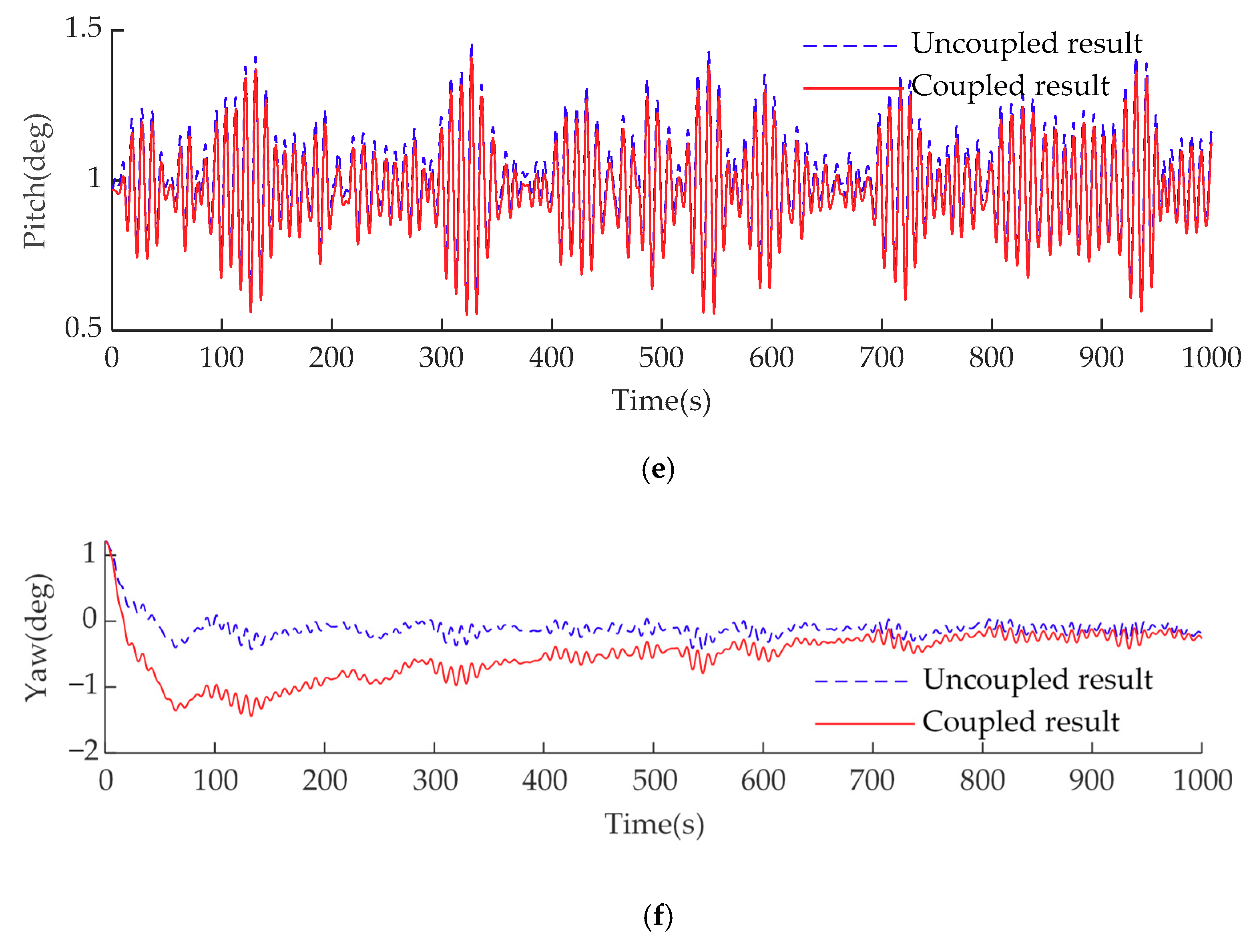
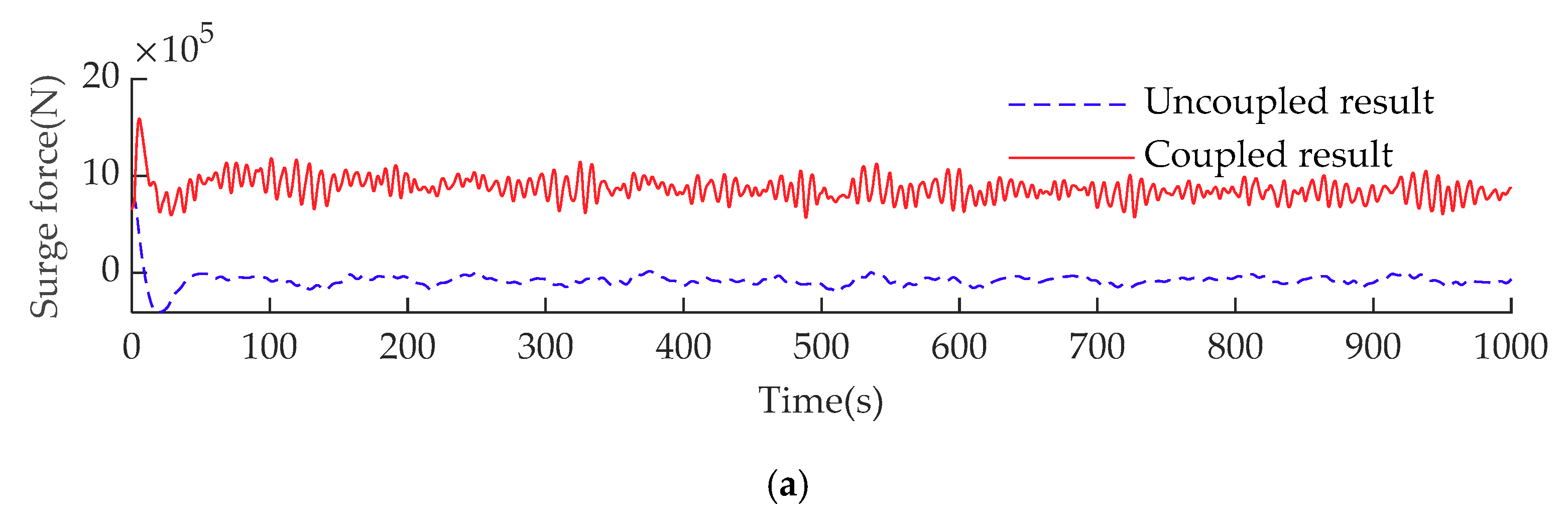
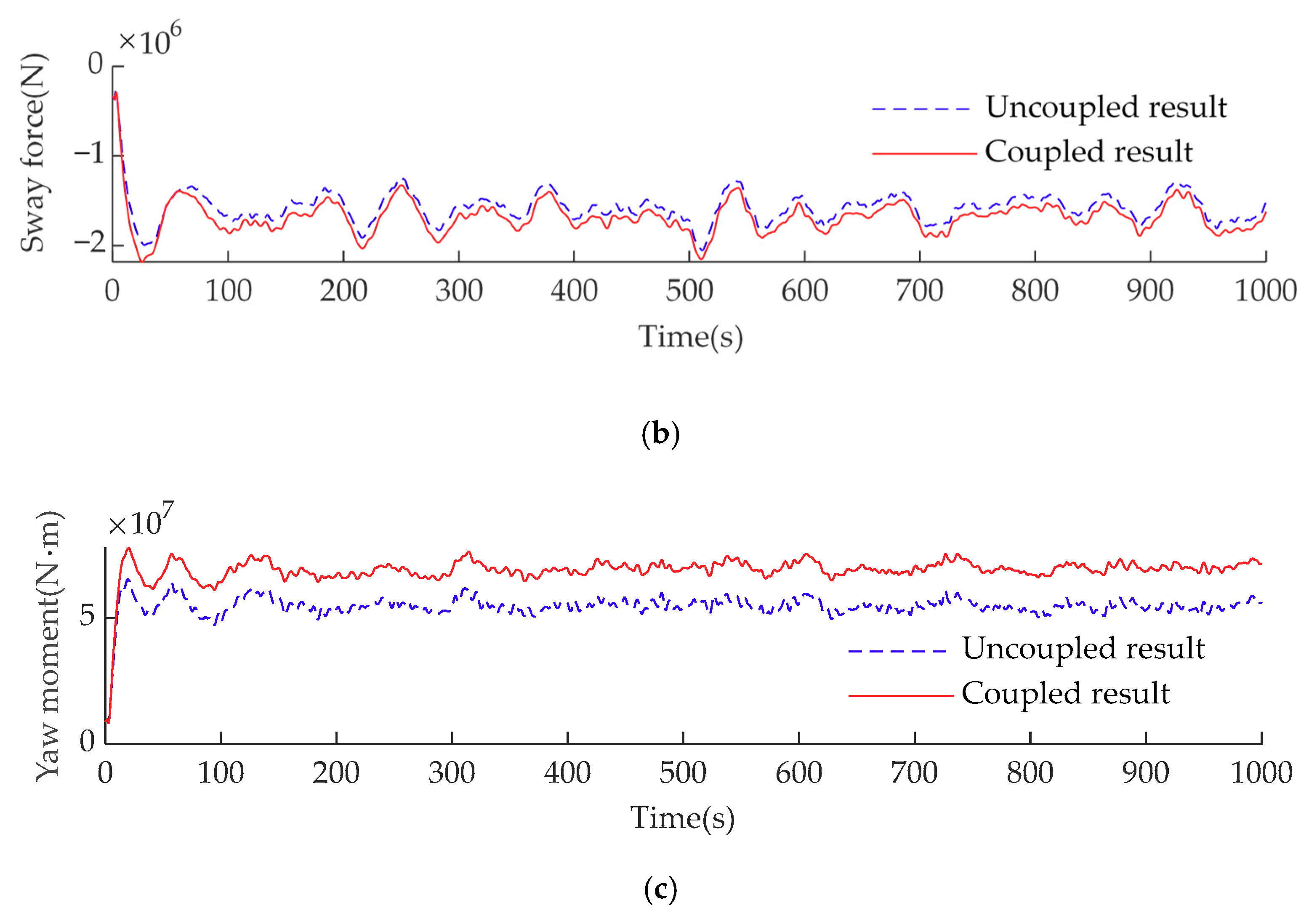
4.2. Coupled Dynamic Pipelaying Analysis Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, Z.; Wang, L.; Ci, H. An apparatus design and testing of a flexible pipe-laying in submarine context. Ocean Eng. 2015, 106, 386–395. [Google Scholar] [CrossRef]
- Zhou, Y.; Wang, D.; Guo, Y.; Liu, S. The static frictional behaviors of rubber for pipe-Laying operation. Appl. Sci. 2017, 7, 760. [Google Scholar] [CrossRef]
- Li, Z.; Wang, C.; He, N.; Zhao, D. An overview of deepwater pipeline laying technology. China Ocean Eng. 2008, 22, 521–532. [Google Scholar]
- Bruschi, R.; Vitali, L.; Marchionni, L.; Parrella, A.; Mancini, A. Pipe technology and installation equipment for frontier deep water projects. Ocean Eng. 2015, 108, 369–392. [Google Scholar] [CrossRef]
- Wang, F.; Chen, J.; Gao, S.; Tang, K.; Meng, X. Development and sea trial of real-time offshore pipeline installation monitoring system. Ocean Eng. 2017, 146, 468–476. [Google Scholar] [CrossRef]
- Jensen, G.A. Offshore pipelaying dynamics. Ph.D. Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2010. [Google Scholar]
- Plunkett, R. Static bending stresses in catenaries and drill strings. J. Eng. Ind. 1967, 89, 31–36. [Google Scholar] [CrossRef]
- Dixon, D.A.; Rutledge, D.R. Stiffened catenary calculations in pipeline laying problem. J. Eng. Ind. 1968, 90, 153–160. [Google Scholar] [CrossRef]
- Brewer, W.V.; Dixon, D.A. Influence of lay barge motions on a deepwater pipeline laid under tension. J. Manuf. Sci. Eng. 1970, 92, 595–604. [Google Scholar] [CrossRef]
- Gong, S.F.; Chen, K.; Chen, Y.; Jin, W.L.; Li, Z.G.; Zhao, D.Y. Configuration analysis of deepwater S-lay pipeline. China Ocean Eng. 2011, 25, 519–530. [Google Scholar] [CrossRef]
- Zan, Y.; Yuan, L.; Han, D.; Bai, X.; Wu, Z. Real-time dynamic analysis of J-laying. Chaos Soliton Fract. 2016, 89, 381–390. [Google Scholar] [CrossRef]
- Gong, S.; Xu, P.; Bao, S.; Zhong, W.; He, N.; Yan, H. Numerical modelling on dynamic behaviour of deepwater S-lay pipeline. Ocean Eng. 2014, 88, 393–408. [Google Scholar] [CrossRef]
- Orcina Ltd. OrcaFlex Manual Version 10.0e; Orcina Ltd.: Cumbria, UK. Available online: https://www.orcina.com/SoftwareProducts/OrcaFlex/Documentation/index.php (accessed on 18 December 2017).
- Liang, H.; Yue, Q.; Lim, G.; Palmer, A.C. Study on the contact behavior of pipe and rollers in deep S-lay. Appl Ocean Res. 2018, 72, 1–11. [Google Scholar] [CrossRef]
- Xie, P.; Zhao, Y.; Yue, Q.; Palmer, A.C. Dynamic loading history and collapse analysis of the pipe during deepwater S-lay operation. Mar. Struct. 2015, 40, 183–192. [Google Scholar] [CrossRef]
- Jensen, G.A.; Safstrom, N.; Nguyen, T.D.; Fossen, T.I. A nonlinear PDE formulation for offshore vessel pipeline installation. Ocean Eng. 2010, 37, 365–377. [Google Scholar] [CrossRef]
- Wittbrodt, E.; Szczotka, M.; Maczyński, A.; Wojciech, S. Rigid Finite Element Method in Analysis of Dynamics of Offshore Structures; Springer: Berlin, Germany, 2013. [Google Scholar]
- Duan, M.; Wang, Y.; Estefen, S.; He, N.; Li, L.; Chen, B. An installation system of deepwater risers by an S-lay vessel. China Ocean Eng. 2011, 25, 139–148. [Google Scholar] [CrossRef]
- Wang, F.; Luo, Y.; Xie, Y.; Li, B.; Li, J. Practical and theoretical assessments of subsea installation capacity for HYSY 201 laybarge according to recent project performances in South China Sea. In Proceedings of the Offshore Technology Conference; 5–8 May 2014. [Google Scholar]
- Cummins, W. The Impulse Response Function and Ship motions. Available online: http://dome.mit.edu/bitstream/handle/1721.3/49049/DTMB_1962_1661.pdf?sequence=1 (accessed on 10 May 2015).
- Newman, J.N. Marine Hydrodynamics; MIT Press: Boston, MA, USA, 2018. [Google Scholar]
- Ogilvie, T.F. Recent progress toward the understanding and prediction of ship motions. In Proceedings of the 5th Symposium on Naval Hydrodynamics, Bergen, Norway, 10–12 September 1964; pp. 3–80. [Google Scholar]
- Hasselmann, K.; Barnett, T.; Bouws, E.; Carlson, H.; Cartwright, D.; Enke, K.; Ewing, J.; Gienapp, H.; Hasselmann, D. Measurements of Wind-Wave Growth and Swell Decay during the Joint North Sea Wave Project (JONSWAP); Technical Report; Deutches Hydrographisches Institut: Heidelberg, Germany, January 1973. [Google Scholar]
- Lee, C.-H.; Newman, J.N. WAMIT User Manual; Versions 6.3, 6.3PC, 6.3S, 6.3S-PC; WAMIT Inc.: Chestnut Hill, MA, USA, 2006. [Google Scholar]
- Forum, O.C.I.M. Prediction of Wind and Current Loads on VLCCs, 2nd ed.; Witherby & Co.: London, UK, 1994. [Google Scholar]
- Choi, J.W.; Park, J.J. A Study on the Effects of Wind Load on the DP Capability. In Proceedings of the Twenty-fourth International Ocean and Polar Engineering Conference, Busan, Korea, June 15–20 2014. [Google Scholar]
- SINTEF Ocean. SIMO 4.12.2 Theory Manual. Available online: https://www.sintef.no/globalassets/upload/marintek/pdf-filer/sofware/simo.pdf (accessed on 10 June 2018).
- Yang, X.; Sun, L.; Chai, S. Time Domain Simulation of a Dynamic Positioning Deepwater Semisubmersible Drilling Platform. In Proceedings of the ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014; pp. V08AT06A021–V008AT006A021. [Google Scholar]
- Malvern, L.E. Introduction to the Mechanics of a Continuous Medium; Prentice Hall, Inc.: Englewood, NJ, USA, 1969. [Google Scholar]
- SINTEF Ocean. RIFLEX 4.12.2 Theory Manual. Available online: https://www.sintef.no/globalassets/upload/marintek/pdf-filer/sofware/riflex.pdf (accessed on 10 June 2018).
- Morison, J.; Johnson, J.; Schaaf, S. The force exerted by surface waves on piles. J. Pet. Technol. 1950, 2, 149–154. [Google Scholar] [CrossRef]
- Faltinsen, O. Sea Loads on Ships and Offshore Structures; Cambridge University Press: Cambridge, UK, 1993; Volume 1. [Google Scholar]
- Gong, S.; Xu, P. The influence of sea state on dynamic behaviour of offshore pipelines for deepwater S-lay. Ocean Eng. 2016, 111, 398–413. [Google Scholar] [CrossRef]
- Wilson, B.W. Characteristics of Anchor Cables in Uniform Ocean Currents; Texas A & M University: College Station, TX, USA, 1960. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Unit | Data |
|---|---|---|
| Overall length | m | 204.65 |
| Length between perpendiculars | m | 185.00 |
| Breadth | m | 39.20 |
| Depth | m | 14.00 |
| Mean draft | m | 8 |
| Trim | ° | 1 |
| Displacement | t | 47,886.7 |
| Transverse inertia radius | m | 15.93 |
| Longitudinal inertia radius | m | 55.24 |
| No. | Type | x Direction Position/m | y Direction Position/m | Rotating Speed/rpm | Thruster Diameter | Maximum Thrust/kN |
|---|---|---|---|---|---|---|
| 1 | azimuth | −92.50 | 9.45 | 181 | 3.6 | 680 |
| 2 | Azimuth | −92.50 | −9.45 | 181 | 3.6 | 680 |
| 3 | azimuth | −11.25 | 15.40 | 192 | 3.2 | 540 |
| 4 | azimuth | −11.25 | −15.40 | 192 | 3.2 | 540 |
| 5 | azimuth | 39.15 | 14.00 | 192 | 3.2 | 540 |
| 6 | azimuth | 39.15 | −14.00 | 192 | 3.2 | 540 |
| 7 | azimuth | 54.21 | 0 | 192 | 3.2 | 540 |
| Description | Unit | Value |
|---|---|---|
| Outer diameter | m | 0.599 |
| Wall thickness | m | 0.0159 |
| Steel density | kg/m3 | 7.8 × 103 |
| Poisson ratio | / | 0.3 |
| Elastic modulus | N/m2 | 2.07 × 1011 |
| Concrete coating thickness | m | 0.06 |
| Concrete coating density | kg/m3 | 2.95 × 103 |
| Anticorrosion coating thickness | m | 0.0035 |
| Anticorrosion coating density | kg/m3 | 940 |
| Joint length | m | 12.2 |
| Hs(m) | Tp(s) | Vw(m/s) | (°) | |
|---|---|---|---|---|
| 1.5 | 8.2 | 3.3 | 9 | 45 |
| Items | Value |
|---|---|
| Drag Coefficient | 1.2 |
| Added Mass Coefficient | 1 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zan, Y.; Yuan, L.; Huang, K.; Ding, S.; Wu, Z. Numerical Simulations of Dynamic Pipeline-Vessel Response on a Deepwater S-Laying Vessel. Processes 2018, 6, 261. https://doi.org/10.3390/pr6120261
Zan Y, Yuan L, Huang K, Ding S, Wu Z. Numerical Simulations of Dynamic Pipeline-Vessel Response on a Deepwater S-Laying Vessel. Processes. 2018; 6(12):261. https://doi.org/10.3390/pr6120261
Chicago/Turabian StyleZan, Yingfei, Lihao Yuan, Kuo Huang, Song Ding, and Zhaohui Wu. 2018. "Numerical Simulations of Dynamic Pipeline-Vessel Response on a Deepwater S-Laying Vessel" Processes 6, no. 12: 261. https://doi.org/10.3390/pr6120261
APA StyleZan, Y., Yuan, L., Huang, K., Ding, S., & Wu, Z. (2018). Numerical Simulations of Dynamic Pipeline-Vessel Response on a Deepwater S-Laying Vessel. Processes, 6(12), 261. https://doi.org/10.3390/pr6120261