
Online Optimization Applied to a Shockless Explosion Combustor


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
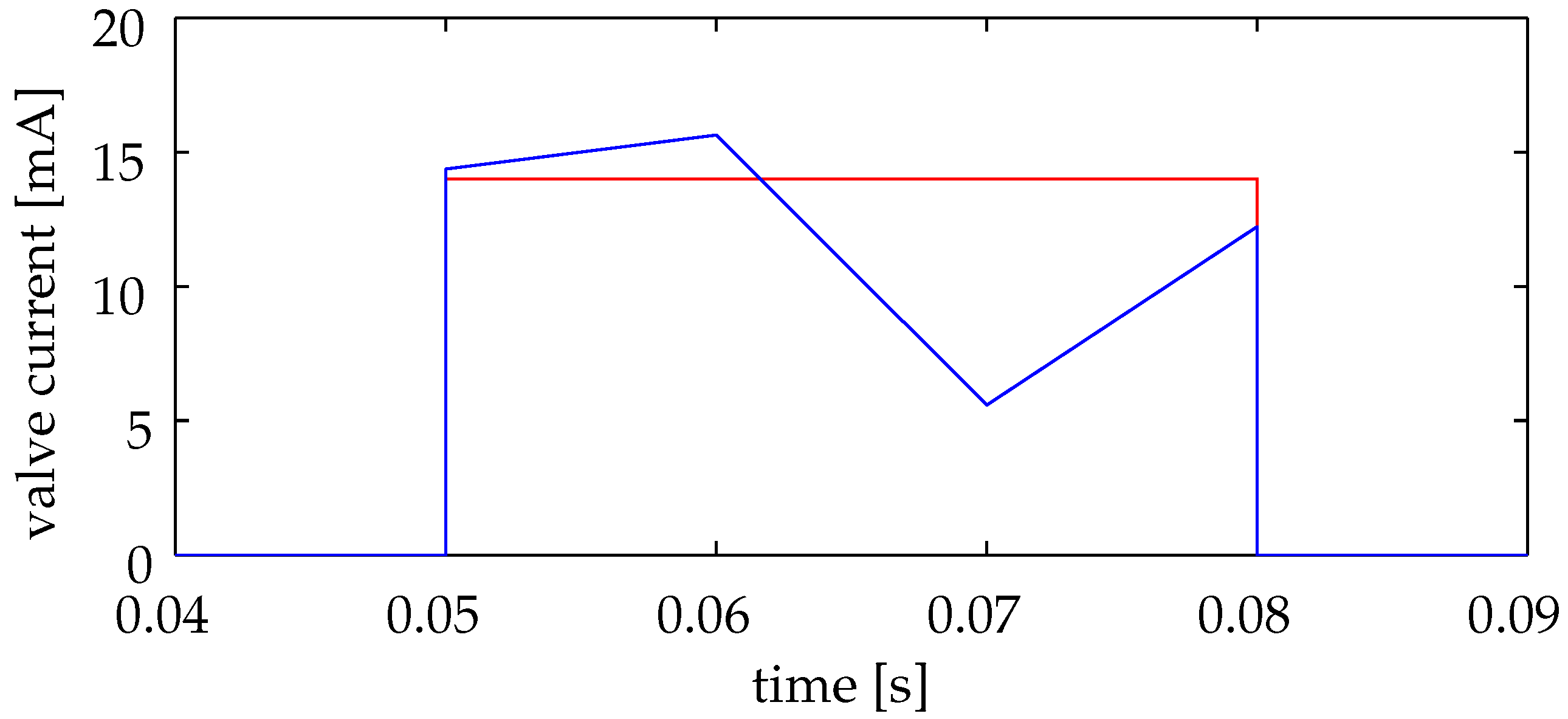
2.1. The SEC Test Rig
2.2. Test Procedure
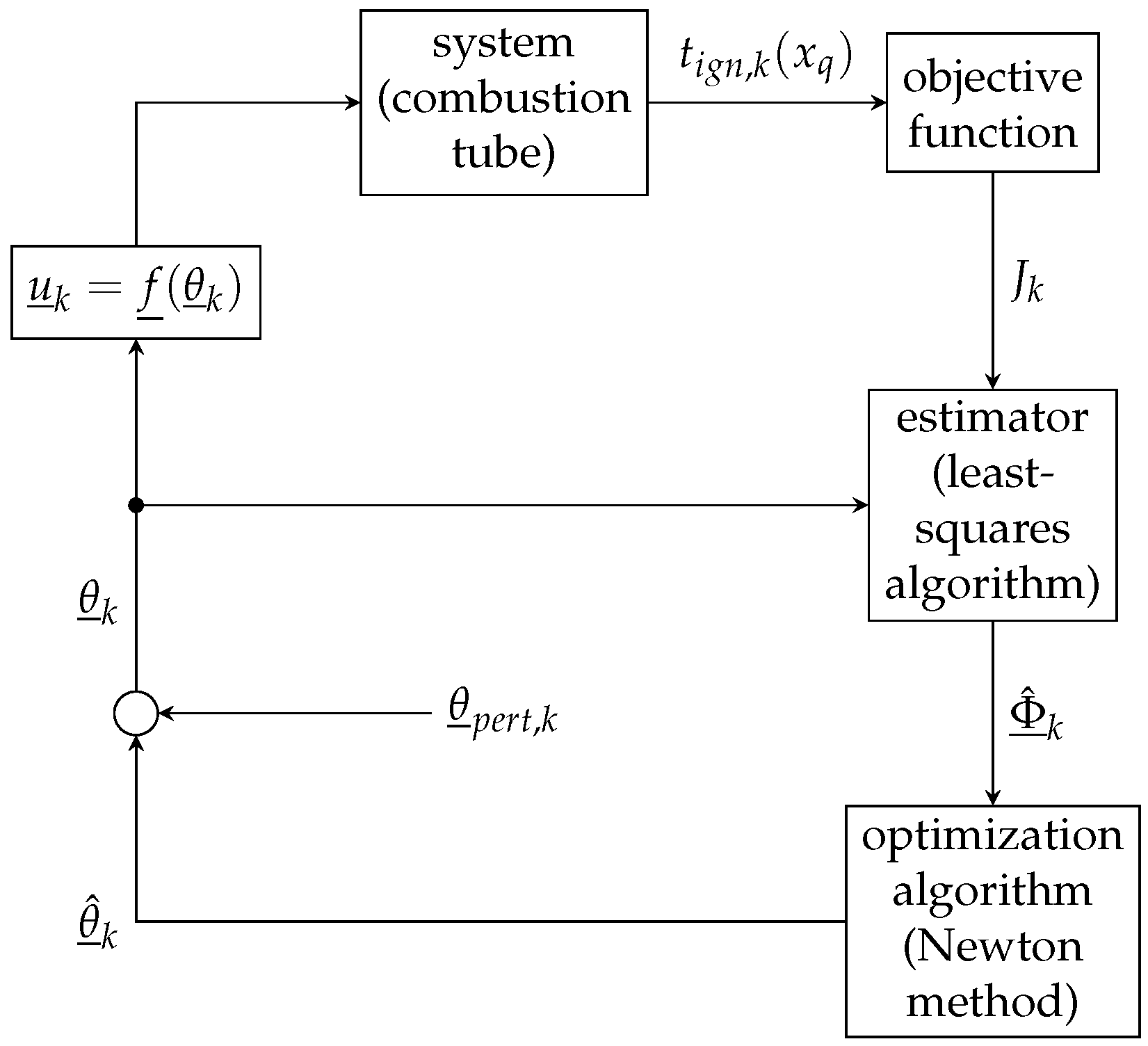
2.3. Extremum Seeking Control
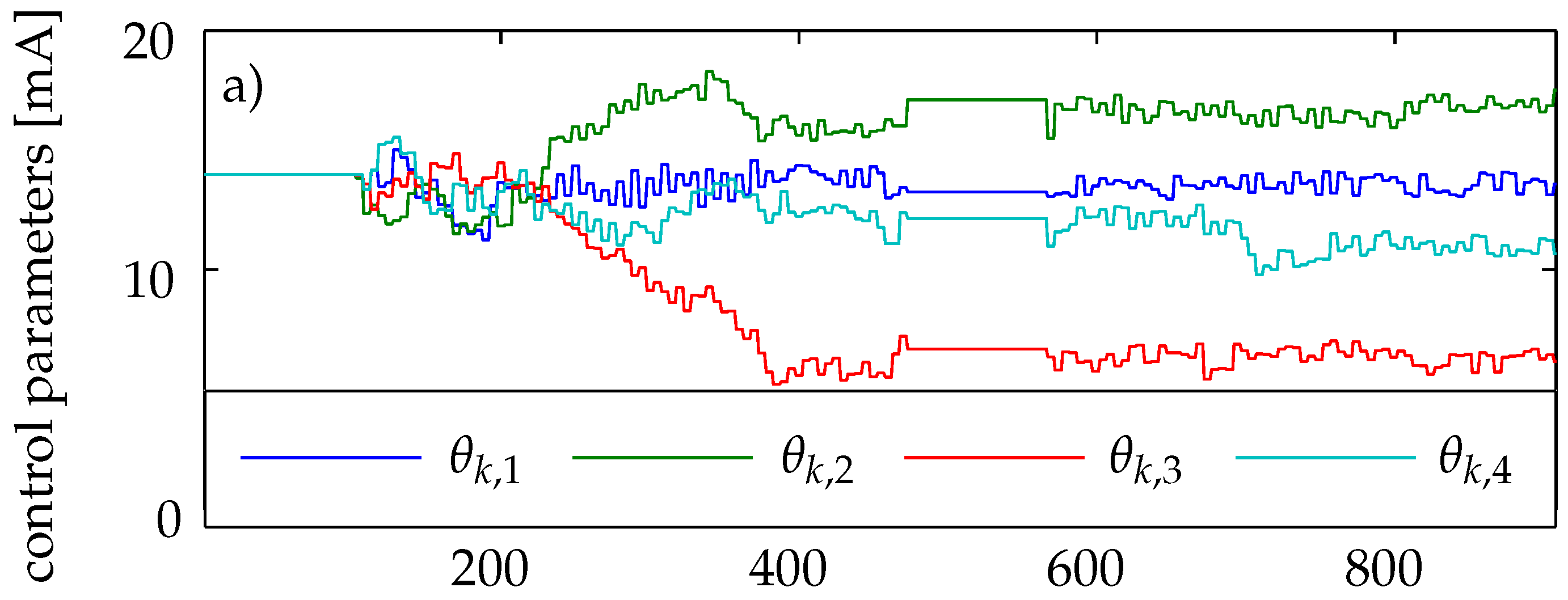
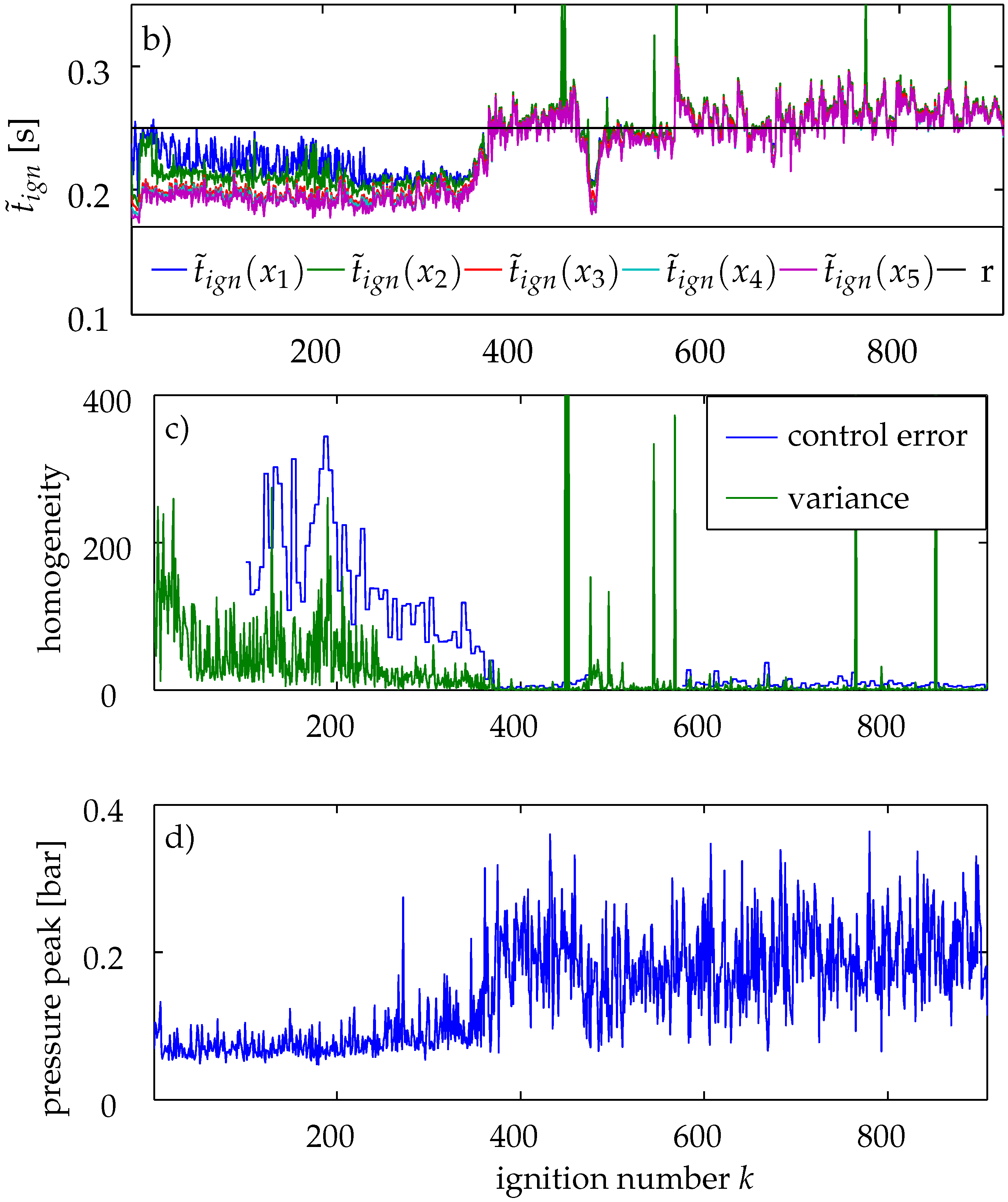
3. Results
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| aCVC | approximate constant volume combustion |
| ESC | extremum seeking controller |
| PDE | pulsed detonation engine |
| RDE | rotating detonation engine |
| SEC | shockless explosion combustion |
References
- Putnam, A.; Belles, F.; Kentfield, J. Pulse combustion. Prog. Energy Combust. Sci. 1986, 12, 43–79. [Google Scholar] [CrossRef]
- Roy, G.; Frolov, S.; Borisov, A.; Netzer, D. Pulse detonation propulsion: challenges, current status, and future perspective. Prog. Energy Combust. Sci. 2004, 30, 545–672. [Google Scholar] [CrossRef]
- Lu, F.K.; Braun, E.M. Rotating detonation wave propulsion: experimental challenges, modeling, and engine concepts. J. Propuls. Power 2014, 30, 1125–1142. [Google Scholar] [CrossRef]
- Bobusch, B.C.; Berndt, P.; Paschereit, C.O.; Klein, R. Shockless Explosion Combustion: An Innovative Way of Efficient Constant Volume Combustion in Gas Turbines. Combust. Sci. Technol. 2014, 186, 1680–1689. [Google Scholar] [CrossRef] [Green Version]
- Bobusch, B.C. Fluidic Devices for Realizing the Shockless Explosion Combustion Process. Ph.D. Thesis, Technische Universität Berlin, Berlin, Germany, 2015. [Google Scholar]
- Berndt, P.; Klein, R.; Paschereit, C.O. A Kinetics Model for the Shockless Explosion Combustion. In Proceedings of the ASME Turbo Expo 2016: Turbomachinery Technical Conference and Exposition, Seoul, Korea, 13–17 June 2016; Volume 4B.
- Reichel, T.G.; Schäpel, J.S.; Bobusch, B.C.; Klein, R.; King, R.; Paschereit, C.O. Shockless Explosion Combustion: Experimental Investigation of a New Approximate Constant Volume Combustion Process. J. Eng. Gas Turbines Power 2016, 139, 021504–021510. [Google Scholar] [CrossRef]
- Tan, Y.; Moase, W.; Manzie, C.; Nesic, D.; Mareels, I. Extremum seeking from 1922 to 2010. In Proceedings of the 29th Chinese Control Conference, China, Beijing, 28–31 July 2010.
- Krstic, M.; Wang, H.H. Design and Stability Analysis of Extremum Seeking Feedback for General Nonlinear Systems. In Proceedings of the Conference on Decision & Control, San Diego, CA, USA, 10–12 December 1997; pp. 1743–1748.
- Tan, Y.; Nesic, D.; Mareels, I. On non-local stability properties of extremum seeking control. Automatica 2006, 42, 889–903. [Google Scholar] [CrossRef]
- Nesic, D.; Tan, Y.; Manzie, C.; Mohammadi, A.; Moase, W. A unifying framework for analysis and design of extremum seeking controllers. In Proceedings of the IEEE Chinese Control and Decision Conference, Taiyuan, China, 23–25 May 2012; pp. 4274–4285.
- Krstic, M. Performance improvement and limitations in extremum seeking control. Syst. Control Lett. 2000, 39, 313–326. [Google Scholar] [CrossRef]
- Henning, L.; Becker, R.; Feuerbach, G.; Muminovic, R.; King, R.; Brunn, A.; Nitsche, W. Extensions of adaptive slope-seeking for active flow control. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2008, 222, 309–322. [Google Scholar] [CrossRef]
- Gelbert, G.; Moeck, J.P.; Paschereit, C.O.; King, R. Advanced algorithms for gradient estimation in one- and two-parameter extremum seeking controllers. J. Process Control 2012, 22, 700–709. [Google Scholar] [CrossRef]
- Moase, W.H.; Manzie, C.; Brear, M.J. Newton-Like Extremum-Seeking for the Control of Thermoacoustic Instability. IEEE Trans. Autom. Control 2010, 55, 2094–2105. [Google Scholar] [CrossRef]
- Schäpel, J.S.; King, R.; Bobusch, B.; Moeck, J.; Paschereit, C.O. Adaptive Control of Mixture Profiles for a Combustion Tube. In Proceedings of the ASME Turbo Expo 2015: Turbine Technical Conference and Exposition, Montréal, QC, Canada, 15–19 June 2015. GT2015-42027.
- Khong, S.Z.; Nesic, D.; Krstic, M. Iterative learning control based on extremum seeking. Automatica 2016, 66, 238–245. [Google Scholar] [CrossRef]
- Tan, Y.; Nesic, D.; Mareels, I. On the choice of dither in extremum seeking systems: A case study. Automatica 2008, 44, 1446–1450. [Google Scholar] [CrossRef]
- Liu, S.J.; Krstic, M. Stochastic Averaging in Continuous Time and Its Applications to Extremum Seeking. IEEE Trans. Autom. Control 2010, 55, 2235–2250. [Google Scholar] [CrossRef]
- Bobusch, B.C.; Berndt, P.; Paschereit, C.O.; Klein, R. Investigation of fluidic devices for mixing enhancement for the shockless explosion combustion process. In Active Flow and Combustion Control 2014; King, R., Ed.; Springer International Publishing: Cham, Switzerland, 2015; pp. 281–297. [Google Scholar]
- Kristic, M.; Wang, H.H. Stability of extremum seeking feedback for general nonlinear dynamic systems. Automatica 2000, 36, 595–601. [Google Scholar] [CrossRef]
- Iserman, R.; Münchhof, M. Identification of Dynamic Systems; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]


© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schäpel, J.-S.; Reichel, T.G.; Klein, R.; Paschereit, C.O.; King, R. Online Optimization Applied to a Shockless Explosion Combustor. Processes 2016, 4, 48. https://doi.org/10.3390/pr4040048
Schäpel J-S, Reichel TG, Klein R, Paschereit CO, King R. Online Optimization Applied to a Shockless Explosion Combustor. Processes. 2016; 4(4):48. https://doi.org/10.3390/pr4040048
Chicago/Turabian StyleSchäpel, Jan-Simon, Thoralf G. Reichel, Rupert Klein, Christian Oliver Paschereit, and Rudibert King. 2016. "Online Optimization Applied to a Shockless Explosion Combustor" Processes 4, no. 4: 48. https://doi.org/10.3390/pr4040048