1. Introduction
Current use of polluting energy sources, such as fossil fuels, has led to numerous environmental issues and exacerbation of the climate crisis. The advancement of hydrogen energy represents a pivotal opportunity to transition from less-clean energy sources to more sustainable, clean energy alternatives, which is crucial to achieving Sustainable Development Goal 7 (i.e., ensuring affordable clean energy for all) [
1]. The associated technologies require new advancements and proposals.
Recently, proton exchange membrane fuel cells (PEMFCs) have been considered promising energy sources [
2,
3], which possess the characteristics of low-temperature operating conditions, fast start-up, low noise, zero emissions [
4], and a good power-to-weight ratio [
5]. However, a PEMFC is typically a strongly nonlinear, time-varying, multi-input, and multi-output system that needs to be precisely controlled [
6,
7]. Therefore, many parameter estimation methods are applied to PEMFC systems to identify the system models and maintain the system operating at its optimal performance [
8,
9]. Otherwise, insufficient fine control will impair the performance of the system and eventually damage the life of the system [
10,
11]. The detailed dynamic model of PEMFCs developed in [
12] has been widely used in the study of control strategies for PEMFC systems.
The PEMFC system can usually be divided into multiple subsystems, such as fuel cell stack, anode/cathode air supply system, thermal management system, humidity management system, and power converters. Among them, the PEMFC air supply system regulates the amount of oxygen in the cathode by controlling the speed of the air compressor motor [
13]. When the load of the PEMFC system increases, it is necessary to ensure that oxygen is sufficient and avoid oxygen starvation [
14], which may cause irreversible damage [
15] and impede the chemical reactions within the fuel cells [
16]. However, excessive cathode air supply (a larger oxygen excess ratio) does not always lead to better output performance, which may result in higher parasitic power loss [
17]. As a consequence, the above-mentioned condition may reduce the operating efficiency of the fuel cell system [
18]. Therefore, air supply management in fuel cells is crucial to achieve ideal performance of the system. And the optimal oxygen excess ratio (OER) varies with operating current; different operating currents correspond to different optimal OERs [
19].
Several model-based control strategies have been proposed for the control design of PEMFC air supply systems [
20], including fractional order control [
21], model predictive control [
22], intelligent control [
23], and sliding mode control [
24,
25]. Although the above methods have obtained good control results in specific scenarios, engineers are often more familiar with traditional proportional-integral-derivative (PID) controllers for frontier engineering practices. However, due to the nonlinearity and parameter uncertainty of the fuel cell system, it is difficult for traditional PID control to meet the complexity of the system. In recent years, many artificial intelligence algorithms have been applied to fuel cell air supply control to improve the performance of PID control such as neural networks [
26] and fuzzy logic [
27]. Nevertheless, these algorithms will cause the parameters that need to be adjusted in the system to be more complex and the control structure to be more cumbersome, which increase the workload of engineers and is not suitable for actual industrial applications. Even with the intervention of artificial intelligence, overshoot is still an obstacle, and the amount of power dissipated during setpoint tracking, overshoot, and transient regulation during set ratio variations of OER has not received the attention it deserves [
27]. Control of the OER often only considers tracking the reference value of the OER to make the system optimal at a steady state, without considering power consumption during the transient process.
In this paper, active disturbance rejection control (ADRC) is employed to tackle the issues of transient overshoot of the PEMFC system and reduce transient power consumption. ADRC, which is an algorithm based on data-driven evolution [
28], does not rely on accurate system models built offline according to online data mining [
29]. It is proved that linear ADRC has wide adaptability, which considers all the differences between the nominal model of the system and the actual situation as total interference, including nonlinearity, external load interference, and internal modeling uncertainty. Through the analysis of controller output and process output data, the total system disturbance can be estimated in real-time and suppressed. At present, the parameter tuning of ADRC mainly depends on a bandwidth tuning method. The internal mode control parameters are analyzed and tuned in [
30], and a tuning method with two adjustable parameters has been proposed in [
31]. A method to convert the high-order control parameters to second-order ADRC control parameters is proposed to address the tuning problem that is widely occurring in the industrial control process [
32].
In the second section of the paper, the model of the PEMFC system is briefly introduced and the existing control issues are described, and a second-order linear ADRC (LADRC) self-tuning control strategy based on parameter identification results is proposed. The control performance is simulated based on the precise model in
Section 3, and the discussions and conclusions of the simulation results are drawn in
Section 4 and
Section 5.
2. Materials and Methods
As mentioned in the previous section, proper air supply is crucial to improving the efficiency of the PEMFC power generation system, which is also of great significance to maintaining output performance and life [
33]. However, due to sealing and safety requirements, the status of air inside the cathode is hard to detect and monitor. Therefore, the OER is always calculated by an extended state observer (ESO) according to the values of compressor flow rate and supply manifold pressure [
34]. Based on scale transformation, this paper designs a bandwidth-based control strategy of second-order ADRC for a dynamic system model of fuel cell systems. It combines an online identification algorithm to achieve real-time effective control for the dynamic system. The online identification of system parameters is carried out by the recursive least squares method with forgetting factors, and the identified system model is normalized according to the idea of scale transformation. A standardized control strategy is designed for the obtained standard model, and the corresponding adaptive law of controller parameters is given. Then, it is brought into the dynamic model of the system, and the ADRC controller parameters are obtained. The anti-interference characteristics of ADRC are used to suppress the influence of system disturbances such as model errors, realizing rapid and effective control of dynamic fuel cell systems.
Firstly, the general model of the second-order system is normalized. Secondly, the corresponding ADRC controller is designed for the normalization model of the system, and the ADRC adaptive adjustment rules for the second-order system are obtained from the perspective of theoretical analysis. Then, the ADRC adaptive adjustment rules for the general model are obtained through the idea of inverse transformation. Finally, combined with the online identification of parameters, simulations of the precise dynamic model of a PEMFC are carried out to verify the effectiveness and superiority of the proposed algorithm.
2.1. Design of the Controller Parameter-Tuning Scheme
A PEMFC is a complex system consisting of balance of plant (BOP) components for a stack and some auxiliary equipment, including a power conditioning unit, an air compressor, and a cooling module, resulting in a strongly coupled time-varying nonlinear system. The structure of the air supply system is displayed in
Figure 1. To tackle the issues of slow time-varying parameters in the system, based on the principle of nonlinear curve fitting, the forgetting factor recursive least square (FFRLS) algorithm is used to update the model parameters in real-time, and real-time operation data and weight factors are used to avoid the phenomenon of “data saturation”, which realizes effective real-time control of the dynamic air compressor system in combination with the ADRC self-tuning scheme. As discussed in [
16], for a defined load (stack current), the output power of a PEMFC is determined by the OER of the system, and the relationship between the optimal value of the OER and the stack current can be fitted by polynomials. For specific currents, the target of OER control is maintaining the system working at maximum net output power.
An LADRC system is mainly composed of three parts, and its structure is shown in
Figure 2, including the linear state error feedback controller, the controlling plant, and the linear extended state observer (ESO). The basic structure of the LADRC control system is illustrated in
Figure 2, where K
o is the feedback gain.
In the design process of the second-order LADRC controller, it is generally assumed that the mathematical model of the controlled system is as follows:
where
includes the external disturbance and the internal uncertainty of the object, which is the total disturbance of the system, and
is the high-frequency gain of the controlled object.
Let
, where
, then Equation (1) can be expressed as follows:
where
For Equation (2), a full-order linear ESO is designed, which is expressed as follows:
where
is the observer gain, and
is the estimated value of
.
When the system is asymptotically stable,
. In this way, the total perturbation of the system can be estimated. To eliminate the total perturbation of the controlled system utilizing a feedback loop, the following formula is typically employed:
where
is the gain of the proportional controller, whose value is presented in the following equation:
is the reference input signal, which can be stated as follows:
For a second-order LADRC scheme, its linear ESO can be expressed as follows:
The transfer function can be obtained from Equation (4) as follows:
From Equation (6), it can be revealed that the feedback control law of second-order LADRC is as follows:
where
represents the transfer function between the reference input
and
. Substituting Equation (10) into Equation (9), the transfer function from
to
can be obtained as follows:
Substituting Equation (12) into Equation (9), then the transfer function from
to
can be written as follows:
Equation (13) demonstrates that contains the integral term of the output, which indicates that the integral term of the output is included in the estimation of the generalized disturbance . From Equation (11), it can be seen that second-order LADRC consists of three parts: proportional , differential , and disturbance estimation/compensation . Unlike the direct combination of conventional PID controllers, second-order LADRC does not directly employ the derivative and integral of the output but adopts an ESO to estimate the derivative and integral of the output, and then performs linear combination. Therefore, second-order LADRC has a strong connection with the PID controller. Actual industrial applications show that LADRC has better control performance than PID thanks to its anti-interference capability. Thus, in many scenarios, LADRC can be considered to replace the existing PID controllers to improve control performance. This paper uses an existing PID–tuning strategy to obtain the initial tuning rules of second-order LADRC. On this basis, the parameters can be further adjusted to realize better control performance.
2.2. Parameter-Tuning Rules
2.2.1. Acquisition of LADRC Parameters Based on Existing PID Parameters
To facilitate the tuning process, a bandwidth tuning method is proposed in [
35]. In Equations (5) and (7), the elements of the gain
and
are obtained by setting the bandwidth of the controller
and the bandwidth of the observer
as follows:
To further enhance the performance of the closed-loop control system, ref. [
36] put forward adding a damping coefficient
in the setting procedure for the feedback control parameter, which is as follows:
Increasing the
will further reduce the oscillation of the closed-loop control system. Then, an approach to obtain the second-order LADRC parameters using existing PID control parameters is proposed [
36], which converts PID parameters into bandwidth-based second-order LADRC parameters. For ideal PID controllers, the following applies:
where
represents the proportional gain of the controller;
is the integral time constant; and
is the differential time constant. From Equation (16), the following can be calculated:
This can be converted into second-order LADRC system parameters by the following steps, which are also shown in
Figure 3:
Select the parameter
and solve the following equation to get the observer bandwidth
:
Equation (18) has five solutions, and there is at least one real solution. As long as the parameter selected is large enough, Equation (18) should have a positive real solution, which can be set as the initial observer bandwidth;
Determine the bandwidth of the controller
and damping coefficient
by the following formula:
Select the high-frequency gain of the system
according to the following equation:
The above steps ensure that second-order LADRC has the same zero points and integral gain as the ideal PID [
36]. Theoretically, as an inherent property of the system,
is not adjustable. However, due to the order uncertainty of the industrial process, it is almost impossible to obtain an accurate high-frequency gain of the system. Therefore,
is often regarded as a parameter that can be adjusted in the actual parameter tuning process.
2.2.2. A Second-Order LADRC Parameter-Tuning Formula Obtained from the Existing PID–Tuning Formula
The previous section shows that any PID parameter can be converted into a bandwidth-based second-order LADRC controller parameter. Therefore, in theory, the tuning rule of second-order LADRC can be directly obtained through the existing PID parameter-tuning formula.
A method has been proposed in [
37] to convert PID parameters into bandwidth-based second-order LADRC parameters. The scheme of second-order LADRC parameter tuning can be obtained using the existing tuning formula. This paper uses the PID–tuning scheme based on internal model control (IMC) to obtain the tuning formula of second-order LADRC [
38].
The above parameter-tuning method is aimed at the most typical first-order plus time delay (FOPTD) model in industrial control. The general model of the FOPTD system is as follows:
where
represents the pure lag time of the system, and
represents the time constant of the system.
For the above FOPTD model, according to the IMC-PID tuning scheme, the following can be assumed [
39]:
To normalize the time constant of the system, we can select
, then the normalized FOPTD model is obtained:
where
, and the system model before and after the normalization satisfies
. For any
, a set of PID controller parameters can be obtained through Equation (22), and then the corresponding second-order LADRC parameters can be calculated through the method presented in the previous section.
A second-order LADRC parameter-tuning rule for the normalized time-delay model (Equation (23)) can be obtained through curve fitting as follows:
Then, the control parameters obtained by the above equations can be converted into controller parameters suitable for the original FOPTD model (Equation (21)) through scale transformation. A second-order LADRC parameter-tuning formula based on IMC-PID is given as follows:
Second-order LADRC tuning of the FOPTD model with known model parameters can be realized by using Equation (25). For a standard conventional second-order system with known parameters, LADRC self-tuning can be achieved by converting the transfer function of the system into the FOPTD model. Therefore, by combining the model parameter identification process, real-time online control of the dynamic air compressor system can be achieved. The implementation of this strategy on commercial controllers can be achieved through the following steps:
1. Programming Implementation: the control algorithm can be implemented using efficient programming languages such as C on low-power, high-performance microcontrollers.
2. Real-Time Optimization: the computations process can be simplified using lookup tables that can reduce the real-time computational burden of the control algorithm.
3. Hardware Compatibility: sensor signal acquisition and actuator control can be achieved by integrating peripherals like AD/DA conversion modules into microcontroller-based systems.
4. Simulation and Validation: the control strategy’s performance and stability on target hardware platforms can be validated through model simulations and hardware-in-the-loop (HIL) testing.
4. Discussion
In previous studies, optimal control strategies for the air supply system of PEMFCs often focused only on static operating points, without addressing the nonlinear, slow time-varying characteristics of fuel cell systems or the frequent load current disturbances. These approaches lacked consideration for adaptive control under dynamic operating conditions, which is crucial for maintaining robust performance in such scenarios. The approach we proposed in this work, on the other hand, combines parameter identification with an adaptive tuning strategy to address the problem. The system is first identified using parameter identification methods, and the identified model is then used to design an adaptive online self-tuning control scheme for a fuel cell air supply system. This approach eliminates the need for complex modeling processes and cumbersome model-based controller designs, making it more practical for real applications.
As was noted in
Section 3.1, the incorporation of the forgetting factor effectively enhances the robustness of parameter estimation by balancing the influence of fresh and historical data, which lays the foundation for subsequent combination with the parameter self-tuning scheme and ultimately realizing adaptive parameter control of the fuel cell air compressor system.
As can be seen from
Figure 5 and
Figure 6, compared to first-order LADRC and PID, after applying the algorithm proposed in this paper, the overshoot of the OER under dynamic conditions is significantly suppressed thanks to the anti-disturbance ability and the adaptive self-tuning mechanism of the algorithm. As is shown in
Table 3, the dynamic response speed of the system toward variations in operating conditions (restabilized in no longer than 0.1 s) is better accelerated than that of the algorithms for comparison, and the maximum overshoot is effectively reduced as well.
To achieve a quantitative comparison, the integrated absolute error (IAE) and the integrated time and absolute error (ITAE) are applied, which can be seen in
Table 4. It is evident that the error of the proposed method is considerably smaller, indicating that the OER is controlled with greater precision, and the error convergence process is also markedly accelerated.
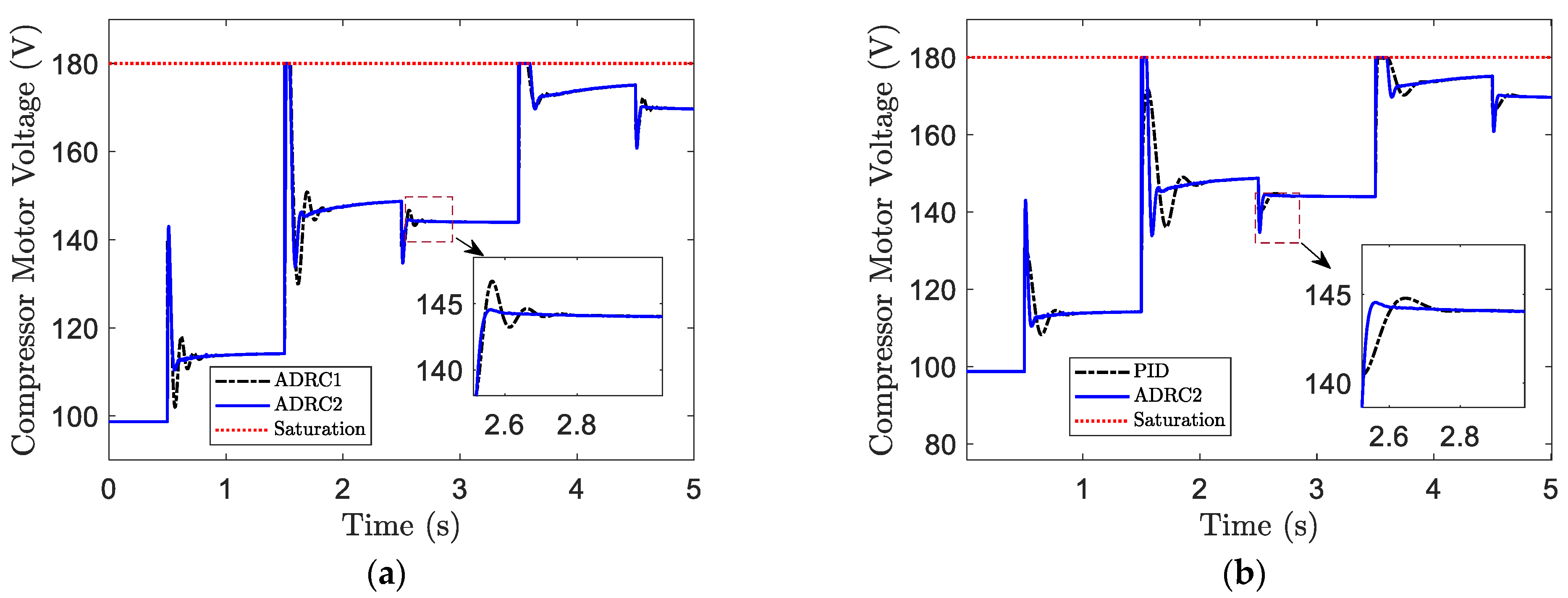
The red dashed line in
Figure 7 demonstrates the most energy-efficient process of compressor transient operations [
40], around which belongs the high-efficiency operation region. It is obvious that the scheme proposed in this paper has a small deviation from the high-efficiency zone, and the trajectory is much smoother than others, which means that it leads to less damage to the compressor unit and effectively reduces energy consumption during the transient processes. Thus, the effect of energy-saving can be extended from static optimization to a dynamic process.
Figure 8 depicts compressor efficiency during the dynamic process, which exhibits an obvious improvement compared to PID and is slightly better than finely tuned first-order LADRC.
Figure 9 and
Figure 10 demonstrate the control variables and changes in compressor powers under dynamic simulation conditions. It is obvious that the proposed algorithm has a faster response speed and fewer fluctuations, which greatly promote the dynamic characteristics of the system and cause less wear and tear on system components.
However, we acknowledge some limitations of our work. The identification algorithm used is relatively simple, leading to limited accuracy in parameter estimation. Additionally, no optimization algorithm was employed to further enhance control performance. Furthermore, our study relies heavily on theoretical models and simulation data, lacking validation on real hardware. This limitation may restrict the applicability of the proposed method in real scenarios.
5. Conclusions
The optimal operation of hydrogen fuel cells is expected to contribute to the large-scale deployment and utilization of hydrogen. Aiming to address the influence of nonlinear time-varying characteristics of the PEMFC system model and the unmodeled part on control performance, this paper combines parameter identification with the superior active anti-disturbance performance of LADRC to overcome the issues of insufficient online identification accuracy. Given that PID controllers have a wealth of tuning rules since they are widely used in industrial processes, this paper employs the second-order LADRC tuning scheme transformed from the IMC-PID parameter adjustment rules to tune the controller parameters.
Furthermore, combining the parameter-tuning algorithm for the second-order LADRC controller with the system online identification strategy, a general bandwidth parameter-tuning rule of the air compressor system under time-varying conditions is derived, and effective real-time control of the PEMFC nonlinear dynamic model is realized. The rule is applied to the dynamic model of the system, and simulated and compared with PID and first-order LADRC in previous investigations, and the good dynamic response performance and anti-disturbance capability of the algorithm proposed in this paper are verified.
As discussed above, compared with other control algorithms, the algorithm proposed in this paper has greatly improved response speed, stability, and the ability to track reference values, and can be better applied to dynamic environments. The rules can be used as a reference for engineering applications, and better control performance of the PEMFC air supply system can be achieved by adjusting the controller parameters based on the self-tuning scheme. In future research, it should be considered to further combine the optimization algorithm to improve the implementation effect and accuracy of the control, and apply it to an experimental system to validate the practicality of the algorithm in laboratory environments.



 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}