
A High-Impedance Fault Detection Method for Active Distribution Networks Based on Time–Frequency–Space Domain Fusion Features and Hybrid Convolutional Neural Network

Abstract
1. Introduction
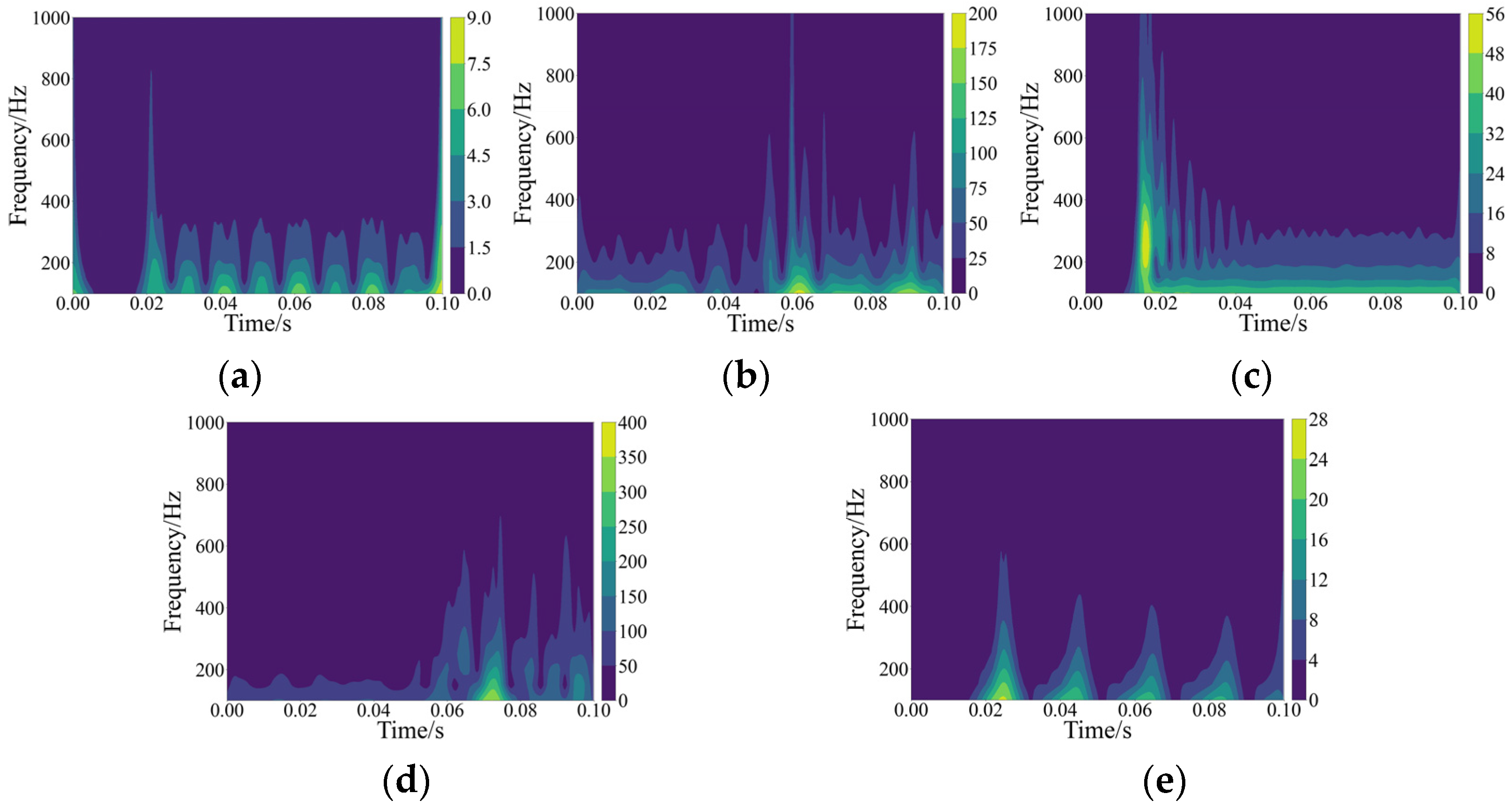
2. Time–Frequency Domain Features of Fault Transient Signals
3. Spatial Domain Features of Transient Fault Signals
3.1. MEWT Decomposition Method
- (a)
- Extract the signal spectrum using the fast Fourier transform (FFT): The Fourier transform of the signal fff is given by
- (b)
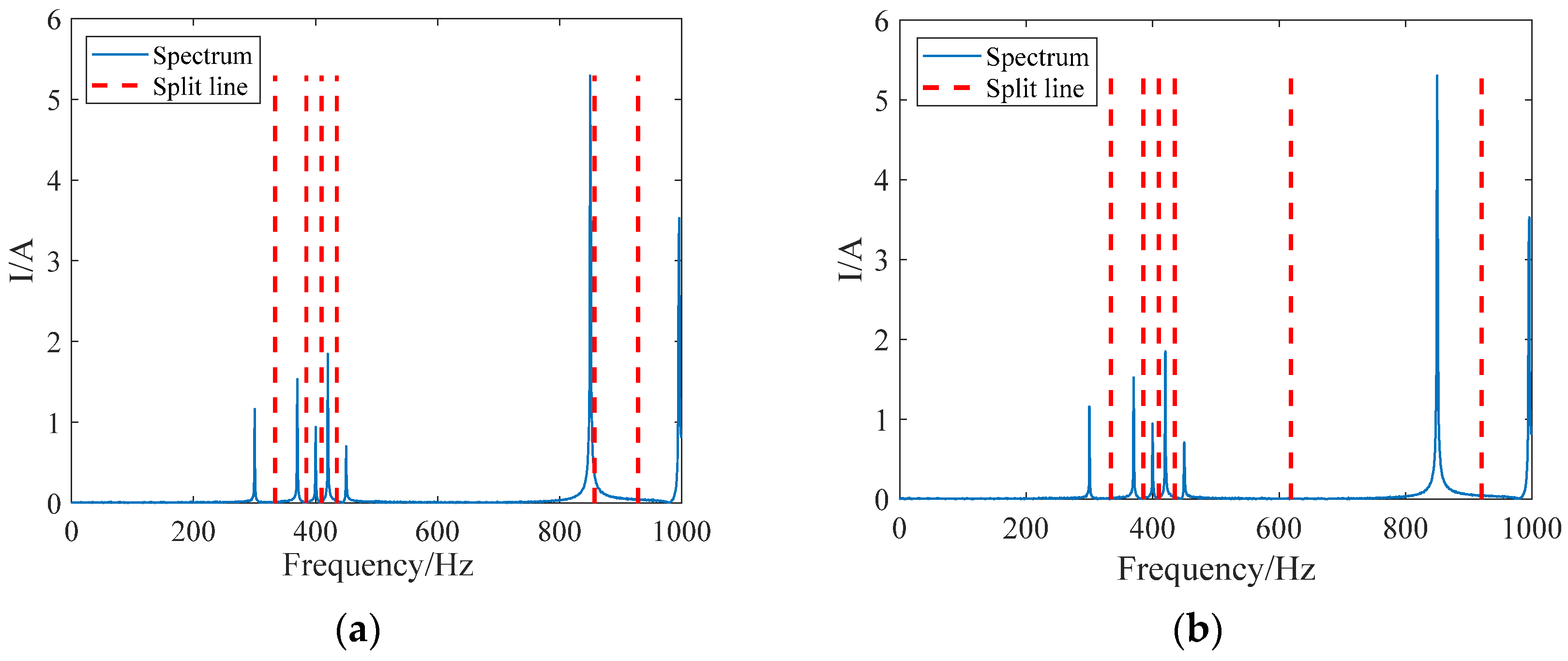
- Segmenting the signal frequency bands: First, identify the number of local maxima marked as Num in the obtained spectrum and arrange them in descending order. Then, further arrange the local maxima in ascending order based on the corresponding frequencies . After this, the normalized frequency band is divided into sub-band , and the sub-band centered at for the AM–FM components is defined as , where , , .
- (c)
- Constructing a wavelet filter bank: For the sub-band , the scaling function and the wavelet function can be expressed as follows:
- (d)
- Signal reconstruction: The inverse Fourier transform is used to calculate and . This allows for obtaining the time–domain representation of each frequency band, known as the modal components .
- In the spectrum, record the local maxima of N frequency bands as .
- Use the midpoint between two adjacent local maxima as the boundary for the first frequency band segmentation and calculate the kurtosis for each frequency band.
- For the first and the N-th frequency bands, if the kurtosis Kn > 3, use the N-divided points (starting from N = 2) between the frequency band’s starting point and its midpoint as new frequency bands. If N ≤ 4, recalculate Kn until Kn ≤ 3 and N > 4, and redefine the frequency band boundaries.
- For intermediate frequency bands , if the kurtosis Kn > 3, use the N-divided points between the band’s starting point and midpoint, as well as between the midpoint and endpoint (starting from N = 2) as new frequency bands and recalculate the kurtosis. If the kurtosis K > 3, then set N = N + 1 and repeat the above process until K ≤ 3 or N > 4.
3.2. SDP Transformation
3.3. Generation Method of Fault Transient Spatial Domain Image Features
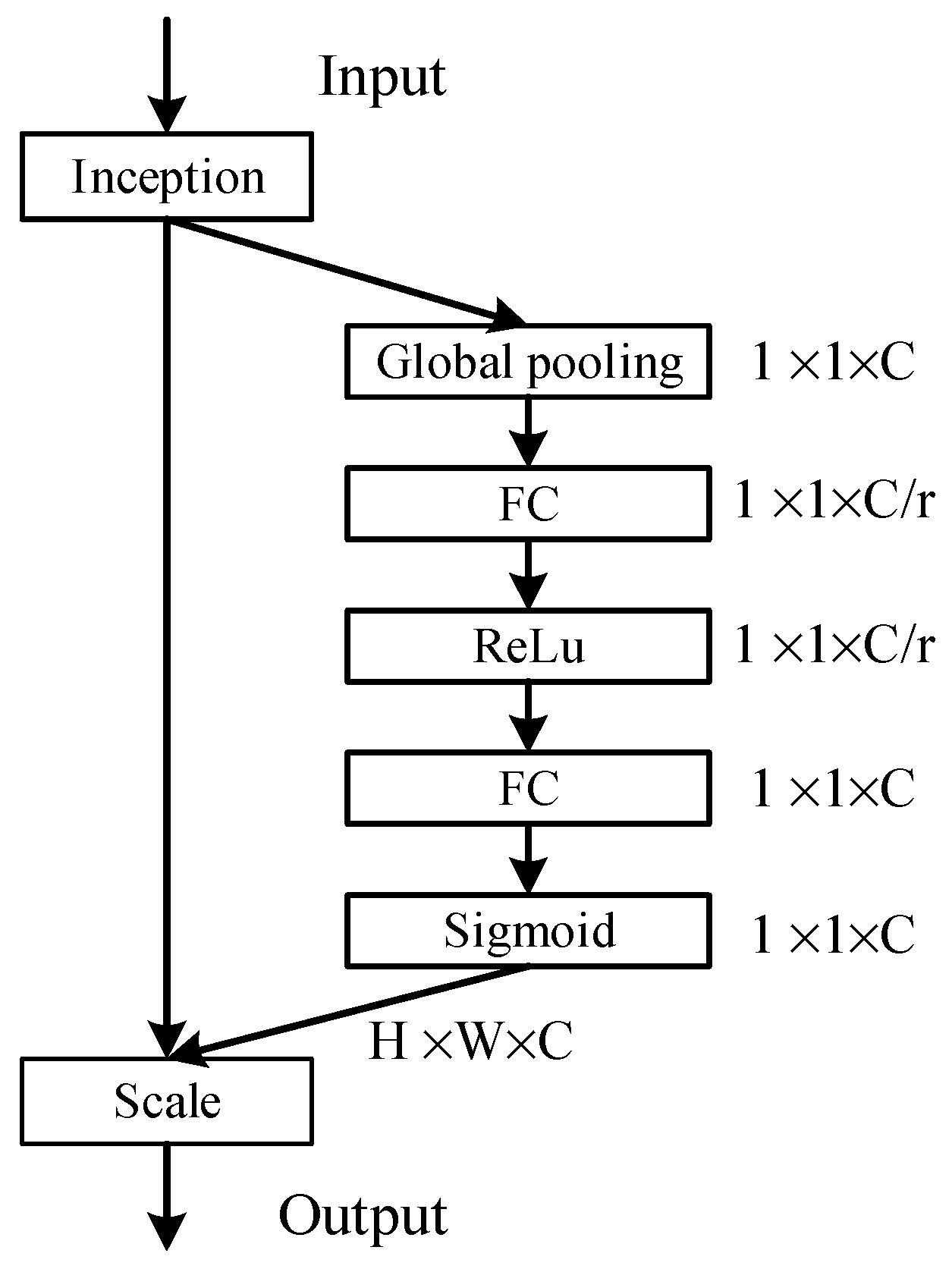
4. Fault Detection Model Based on Hybrid Convolutional Network
5. Experimental Validation and Analysis
5.1. Fault Transient Waveform Database
5.2. Analysis of Fault Detection Result
5.2.1. Analysis of Model Result
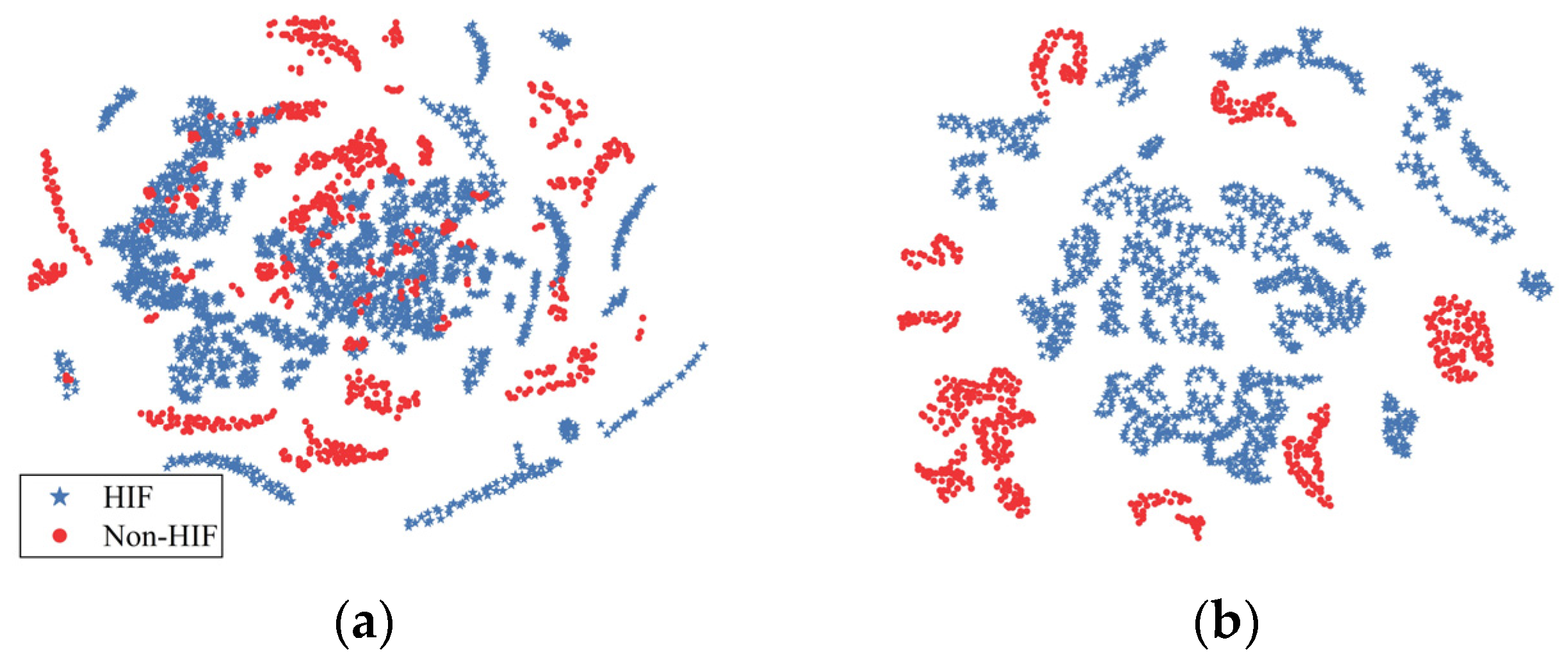
5.2.2. Explanatory Analysis of Grad-CAM
5.3. Model Adaptability Analysis
5.3.1. Effect of Different Fault Conditions
5.3.2. Effects of Noise Interference
5.4. Comparative Analysis of Algorithms
6. Conclusions
- (1)
- The optimized MEWT algorithm has a better noise reduction effect compared to the traditional EWT noise reduction algorithm, helping to minimize the interference of noise on the effective feature extraction of zero-sequence current signals.
- (2)
- The SDP transformation can integrate each IMF obtained from the MEWT of a one-dimensional time–domain signal into a two-dimensional spatial domain image. Compared to traditional signal-to-image conversion methods, the transformed images contain richer fault features, providing better visualization of fault signals.
- (3)
- Through Hybrid-CNN, the deep feature extraction of time–frequency and spatial domain images of zero-sequence current signals can improve HIF detection accuracy. The Grad-CAM visualization results further validate the effectiveness and superiority of the proposed method.
- (4)
- The HIF detection method in this paper accurately detects HIFs under various conditions, including different topologies, noise interferences, and fault scenarios. Compared to other methods, it achieves the best results, offering a new perspective for research on HIF detection in distribution networks.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, J.; Wang, G.; Zeng, D.; Li, H. High-impedance ground faulted line-section location method for a resonant grounding system based on the zero-sequence current’s declining periodic component. Int. J. Electr. Power Energy Syst. 2020, 119, 105910. [Google Scholar] [CrossRef]
- Afshar, M.; Majidi, M.; Gashteroodkhani, O.A.; Amoli, M.E. Analyzing performance of relays for high impedance fault (HIF) detection using hardware-in-the-loop (HIL) platform. Electr. Power Syst. Res. 2022, 209, 108027. [Google Scholar] [CrossRef]
- Hao, B.; Lin, Y.-X.; Luo, J.-Y.; Liu, H.-W.; Liu, Y.-P.; Li, R.-G. High impedance fault detection device based on edge artificial intelligence. Energy Rep. 2023, 9, 546–550. [Google Scholar] [CrossRef]
- Jiang, C.; Bi, M.; Zhang, S.; Li, K.; Lei, S.; Jiang, T. Study on arc characteristics and combustion feature of tree-wire discharge fault in distribution line. Electr. Power Syst. Res. 2024, 230, 110210. [Google Scholar] [CrossRef]
- Gao, J.-H.; Guo, M.-F.; Lin, S.; Chen, D.-Y. Application of semantic segmentation in high-impedance fault diagnosis combined signal envelope and Hilbert marginal spectrum for resonant distribution networks. Expert Syst. Appl. 2023, 231, 120631. [Google Scholar] [CrossRef]
- Yang, D.; Lu, B.; Lu, H. High-Resistance Grounding Fault Detection and Line Selection in Resonant Grounding Distribution Network. Electronics 2023, 12, 4066. [Google Scholar] [CrossRef]
- He, Y.; Zhang, X.; Wang, R.; Cheng, M.; Gao, Z.; Zhang, Z.; Yu, W. Faulty Section Location Method Based on Dynamic Time Warping Distance in a Resonant Grounding System. Energies 2022, 15, 4923. [Google Scholar] [CrossRef]
- Hu, J.; Wei, L.; McGuire, J.; Liu, Z. Flux linkage detection based ground fault identification and system diagnosis in high-resistance grounding systems. IEEE Trans. Ind. Appl. 2016, 53, 2967–2975. [Google Scholar] [CrossRef]
- Wang, X.; Gao, J.; Wei, X.; Guo, L.; Song, G.; Wang, P. Faulty feeder detection under high impedance faults for resonant grounding distribution systems. IEEE Trans. Smart Grid 2022, 14, 1880–1895. [Google Scholar] [CrossRef]
- Zhu, J.-R.; Tang, H.-G.; Leng, H.; Jiao, S.; Chun, H. High impedance grounding fault detection in resonance grounding system based on nonlinear distortion of zero-sequence current. In Proceedings of the 2020 5th International Conference on Smart Grid and Electrical Automation (ICSGEA), Zhangjiajie, China, 13–14 June 2020; pp. 74–78. [Google Scholar] [CrossRef]
- Li, Z.; Cao, Y.; Chen, C.; Li, Y.; Li, J. Fault handling and localization strategy based on waveform characteristics recognition with coordination of Peterson coil and resistance grounding method. Energies 2024, 17, 3510. [Google Scholar] [CrossRef]
- Hearst, M.A.; Dumais, S.T.; Osuna, E.; Platt, J.; Scholkopf, B. Support vector machines. IEEE Intell. Syst. Their Appl. 1998, 13, 18–28. [Google Scholar] [CrossRef]
- Huang, G.-B.; Zhu, Q.-Y.; Siew, C.-K. Extreme learning machine: Theory and applications. Neurocomputing 2006, 70, 489–501. [Google Scholar] [CrossRef]
- Myles, A.J.; Feudale, R.N.; Liu, Y.; Woody, N.A.; Brown, S.D. An introduction to decision tree modeling. J. Chemom. 2004, 18, 275–285. [Google Scholar] [CrossRef]
- Lei, Y.; Yang, B.; Jiang, X.; Jia, F.; Li, N.; Nandi, A.K. Applications of machine learning to machine fault diagnosis: A review and roadmap. Mech. Syst. Signal Process. 2020, 138, 106587. [Google Scholar] [CrossRef]
- Biswal, M.; Prasad, C.D.; Ray, P.; Kishor, N. Modified complete ensemble empirical mode decomposition based HIF detection approach for microgrid system. Int. J. Electr. Power Energy Syst. 2022, 141, 108254. [Google Scholar] [CrossRef]
- Biswal, S.; Biswal, M. Fault-swing discrimination using Hilbert–Huang transform integrated discrete teager energy operato. IET Sci. Meas. Technol. 2018, 12, 829–837. [Google Scholar] [CrossRef]
- Bai, H.; Tang, B.; Cheng, T.; Liu, H. High impedance fault detection method in distribution network based on improved Emanuel model and DenseNet. Energy Rep. 2022, 8, 982–987. [Google Scholar] [CrossRef]
- Chaitanya, B.K.; Yadav, A.; Pazoki, M. An intelligent detection of high-impedance faults for distribution lines integrated with distributed generators. IEEE Syst. J. 2019, 14, 870–879. [Google Scholar] [CrossRef]
- Mishra, M.; Routray, P.; Rout, P. A universal high impedance fault detection technique for distribution system using S-transform and pattern recognition. Int. J. Electr. Power Energy Syst. 2016, 1, 9. [Google Scholar] [CrossRef]
- Baqui, I.; Zamora, I.; Mazón, J.; Buigues, G. High impedance fault detection methodology using wavelet transform and artificial neural networks. Electr. Power Syst. Res. 2011, 81, 1325–1333. [Google Scholar] [CrossRef]
- Tawhid, M.N.A.; Siuly, S.; Wang, H. Diagnosis of autism spectrum disorder from EEG using a time–frequency spectrogram image-based approach. Electron. Lett. 2020, 56, 1372–1375. [Google Scholar] [CrossRef]
- Gilles, J. Empirical wavelet transform. IEEE Trans. Signal Process. 2013, 61, 3999–4010. [Google Scholar] [CrossRef]
- Sun, Y.; Li, S.; Wang, Y.; Wang, X. Fault diagnosis of rolling bearing based on empirical mode decomposition and improved manhattan distance in symmetrized dot pattern image. Mech. Syst. Signal Process. 2021, 159, 107817. [Google Scholar] [CrossRef]
- Feng, Y.; Chen, J.; Zhang, T.; He, S.; Xu, E.; Zhou, Z. Semi-supervised meta-learning networks with squeeze-and-excitation attention for few-shot fault diagnosis. ISA Trans. 2022, 120, 383–401. [Google Scholar] [CrossRef]
- Furse, C.M.; Kafal, M.; Razzaghi, R.; Shin, Y.J. Fault diagnosis for electrical systems and power networks: A review. IEEE Sens. J. 2020, 21, 888–906. [Google Scholar] [CrossRef]
- Cieslak, M.C.; Castelfranco, A.M.; Roncalli, V.; Lenz, P.H.; Hartline, D.K. t-Distributed Stochastic Neighbor Embedding (t-SNE): A tool for eco-physiological transcriptomic analysis. Mar. Genom. 2020, 51, 100723. [Google Scholar] [CrossRef] [PubMed]
- Selvaraju, R.R.; Das, A.; Vedantam, R.; Cogswell, M.; Parikh, D.; Batra, D. Grad-CAM: Why did you say that? arXiv 2016, arXiv:1611.07450. [Google Scholar] [CrossRef]
- Sirojan, T.; Lu, S.; Phung, B.T.; Zhang, D.; Ambikairajah, E. Sustainable deep learning at grid edge for real-time high impedance fault detection. IEEE Trans. Sustain. Comput. 2018, 7, 346–357. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Line Type | Resistance/(Ω·km−1) | Inductance/(mH·km−1) | Ground Capacitance/(μF·km−1) | |||
|---|---|---|---|---|---|---|
| Positive Sequence | Zero Sequence | Positive Sequence | Zero Sequence | Positive Sequence | Zero Sequence | |
| Overhead line | 0.178 | 0.25 | 1.210 | 5.54 | 0.015 | 0.012 |
| Cable line | 0.270 | 2.70 | 0.255 | 1.02 | 0.339 | 0.280 |
| DG | Type | Capacity/(MW) | Transmission Length/(km) |
|---|---|---|---|
| DG1 | Wind farm | 5 | 8 |
| DG2 | Photovoltaic power station | 0.4 | 5 |
| DG3 | Photovoltaic power station | 0.4 | 4 |
| Variable Resistor | Resistance/Ω | DC Power | Voltage/kV |
|---|---|---|---|
| 250–350 | 3.05–3.77/3.91–4.63 | ||
| 300–400 | 3.24–3.96/4.10–4.82 | ||
| 350–450 | |||
| 400–500 | |||
| 450–550 | 4.05–4.77/4.91–5.63 |
| Sample Type | HIF | CS | LS | NLLS | IC |
|---|---|---|---|---|---|
| Position | f1–f17 | Bus bar | Bus bar | l2–l5 | l2–l5 |
| Initial phase angle | 0°, 30°, 60°, 90°, 120°, 150° | ||||
| Phase | ABC | ||||
| Parameter values | 0.5 kΩ | 1200 kvar | 0.25 MW | 3 kV | 8/20 μs |
| 2 kΩ | |||||
| 4 kΩ | 2400 kvar | 0.75 MW | |||
| 6 kΩ | 6 kV | 5/320 μs | |||
| 8 kΩ | 4800 kvar | 1 MW | |||
| 10 kΩ | |||||
| Sample size | 1836 | 54 | 54 | 144 | 144 |
| Model | Training Time/min | Execution Time/ms |
|---|---|---|
| SDP+CNN | 7.11 | 2.07 |
| TFS+CNN | 6.35 | 1.85 |
| TFS+VGG16 | 25.37 | 4.26 |
| SDP+VGG16 | 20.85 | 3.74 |
| SDP+SE+VGG16 | 35.46 | 4.93 |
| The proposed | 40.12 | 6.58 |
| Neutral Point Grounding Method | Fault Initial Phase Angle/(°) | Transition Resistance/(kΩ) | Fault Location/(km) | Accuracy/(%) |
|---|---|---|---|---|
| Ungrounded | 30 | 2 | l2, 4 | 99.98 |
| l7, 16.5 | 100 | |||
| l15, 5.5 | 100 | |||
| Neutral point earthed by high resistance | 0 | 4 | l11, 14.5 | 99.97 |
| 60 | 99.98 | |||
| 120 | 99.99 | |||
| Neutral point earthed via arcing coil (compensation 10%) | 60 | 2 | l11, 14.5 | 99.99 |
| 6 | 99.97 | |||
| 10 | 99.96 |
| Sample Signal-to-Noise Ratio SNR(dB) | Fault Initial Phase Angle/(°) | Transition Resistance/(kΩ) | Fault Location/(km) | Accuracy/(%) |
|---|---|---|---|---|
| 50 | 30 | 3 | l1, 1.5 | 100 |
| 40 | 60 | 10 | l4 11.5 | 100 |
| 35 | 90 | 500 | l8 17 | 99.99 |
| 20 | 120 | 6 | l9 6 | 99.98 |
| 10 | 150 | 50 | l17 13 | 99.97 |
| 2 | 180 | 1 | l21 21 | 99.95 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Feng, L.; Hou, S.; Ren, G.; Lu, T. A High-Impedance Fault Detection Method for Active Distribution Networks Based on Time–Frequency–Space Domain Fusion Features and Hybrid Convolutional Neural Network. Processes 2024, 12, 2712. https://doi.org/10.3390/pr12122712
Wang C, Feng L, Hou S, Ren G, Lu T. A High-Impedance Fault Detection Method for Active Distribution Networks Based on Time–Frequency–Space Domain Fusion Features and Hybrid Convolutional Neural Network. Processes. 2024; 12(12):2712. https://doi.org/10.3390/pr12122712
Chicago/Turabian StyleWang, Chen, Lijun Feng, Sizu Hou, Guohui Ren, and Tong Lu. 2024. "A High-Impedance Fault Detection Method for Active Distribution Networks Based on Time–Frequency–Space Domain Fusion Features and Hybrid Convolutional Neural Network" Processes 12, no. 12: 2712. https://doi.org/10.3390/pr12122712
APA StyleWang, C., Feng, L., Hou, S., Ren, G., & Lu, T. (2024). A High-Impedance Fault Detection Method for Active Distribution Networks Based on Time–Frequency–Space Domain Fusion Features and Hybrid Convolutional Neural Network. Processes, 12(12), 2712. https://doi.org/10.3390/pr12122712