
Investigation of the Dynamic Characteristics of the Buffer Relief Valve of a Swing Motor Under Start–Stop Impact


Abstract
:1. Introduction
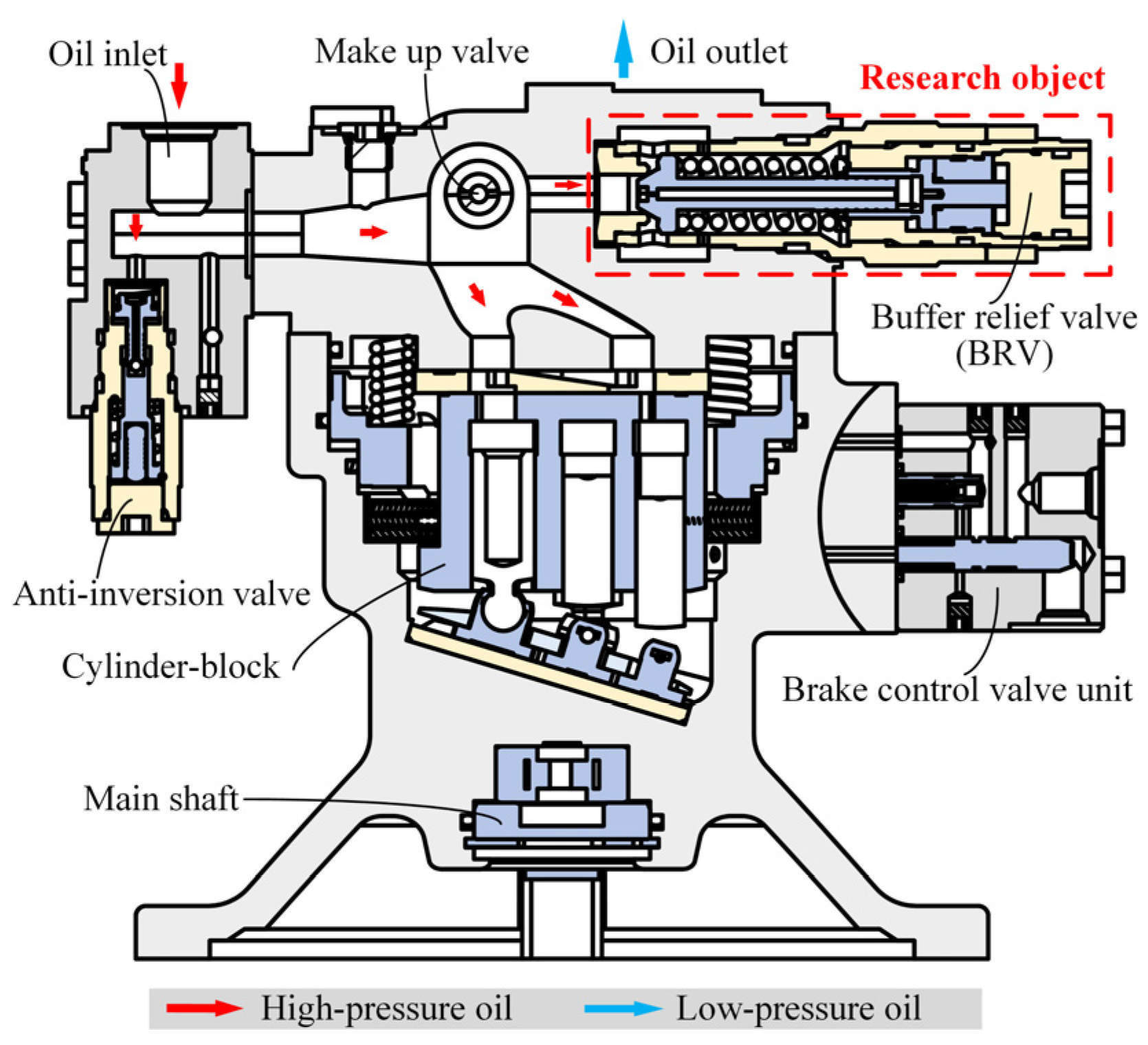
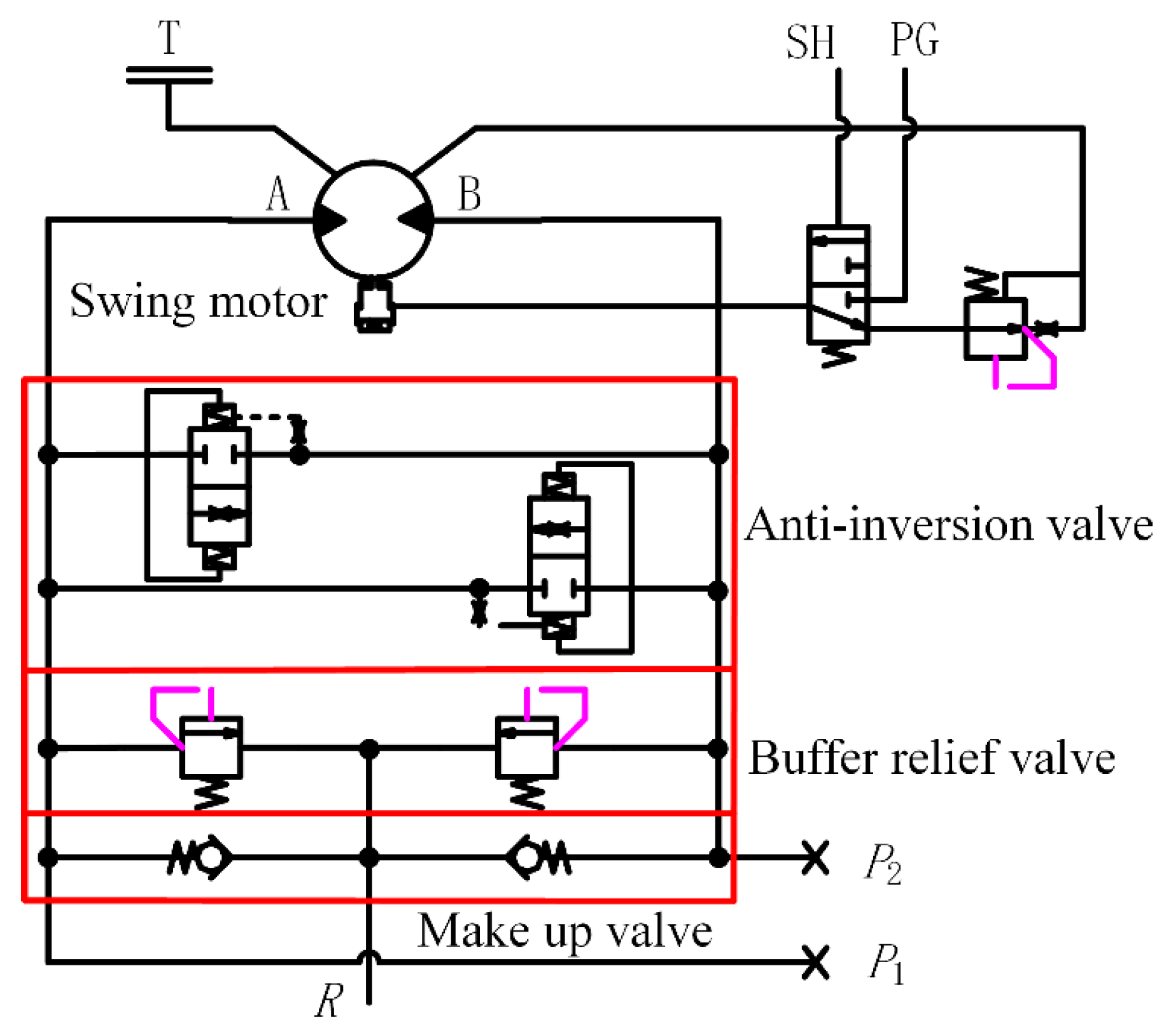
2. Working Principle of Swing Motor
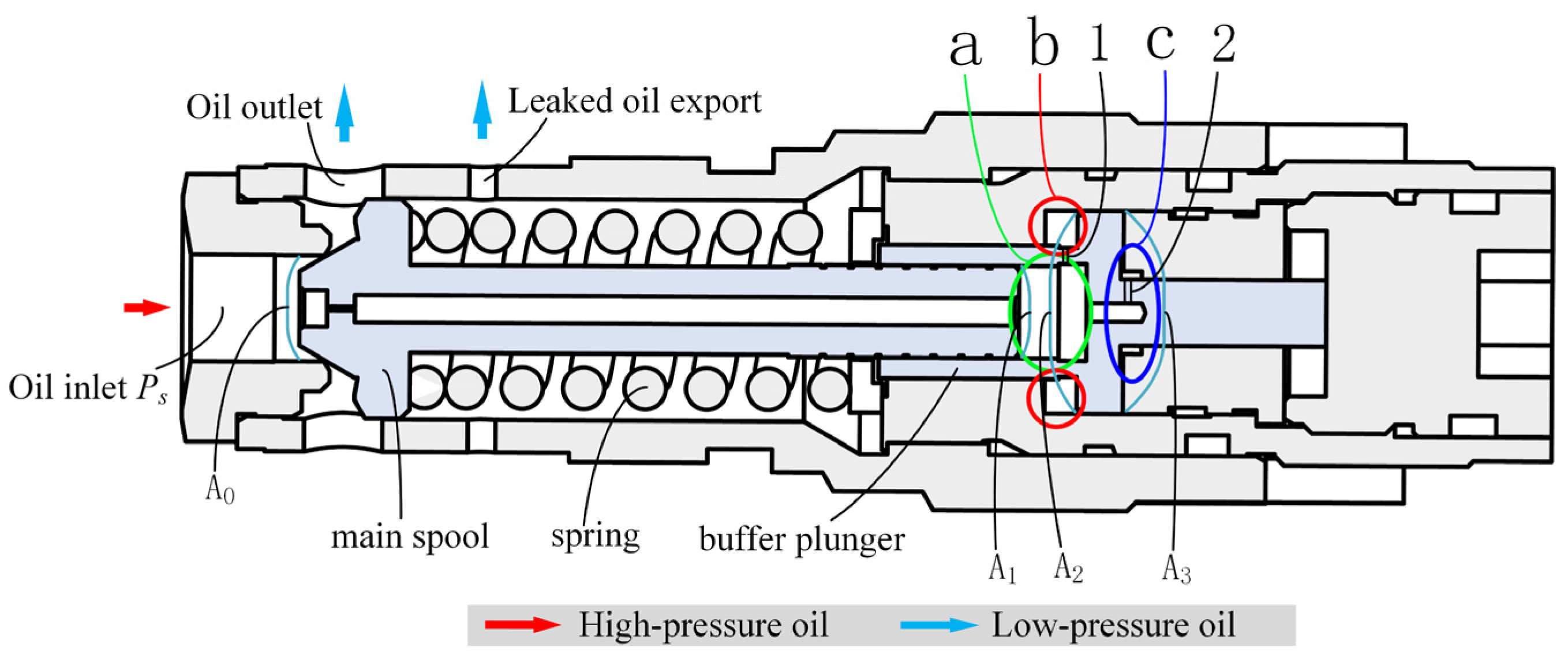
3. Establishment of Dynamic Mathematical Model of BRV
- (1)
- Force balance equation of the main spool:
- (2)
- Buffer plunger force balance equation:
- (1)
- Because of the significant flow gain of the main valve (with a motor displacement of 63 mL/r), the frequency for the first-order differentiation step is relatively high.
- (2)
- The volume of the cavity situated in front of the main valve is substantial, resulting in a relatively low frequency for the first-order inertia link, which consequently exerts a predominant influence. In the design of the buffer relief valve, the choice of the main valve orifice diameter, as indirectly indicated by parameter , significantly impacts the analysis of the dynamic characteristics of the buffer relief valve.
- (3)
- The mass of the primary spool, the stiffness of the reset spring, and the hydraulic stiffness will have an impact on the second-order oscillation link of the intrinsic frequency. The effects of the second-order oscillation should not be overlooked. Additionally, the use of the main spool machining damping holes (reasonable damping hole diameter and length) as the dynamic pressure feedback can be effective in suppressing the oscillation of the second-order link of the oscillating effect.
4. Verification of the Rationality of AMESim Simulation Model
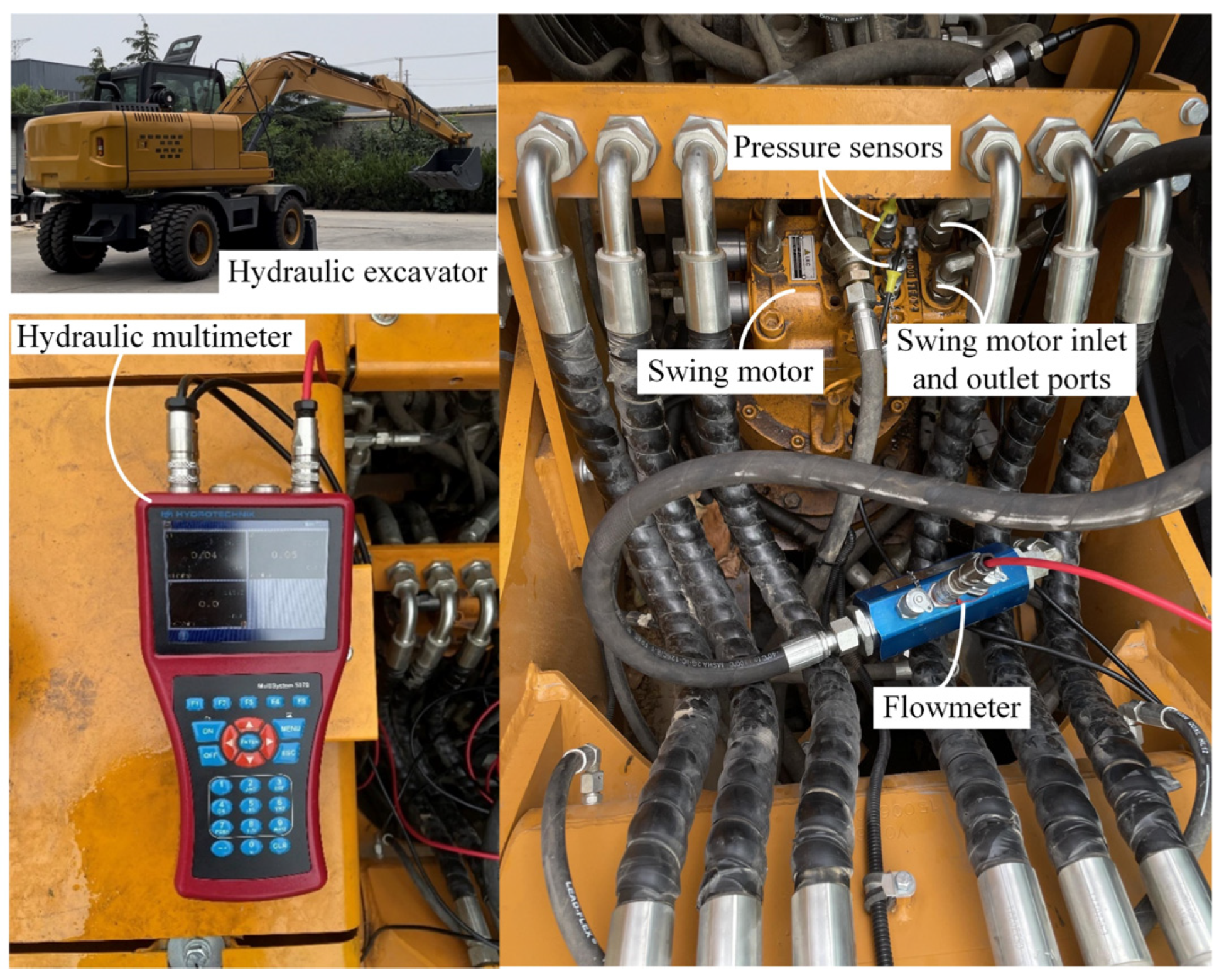
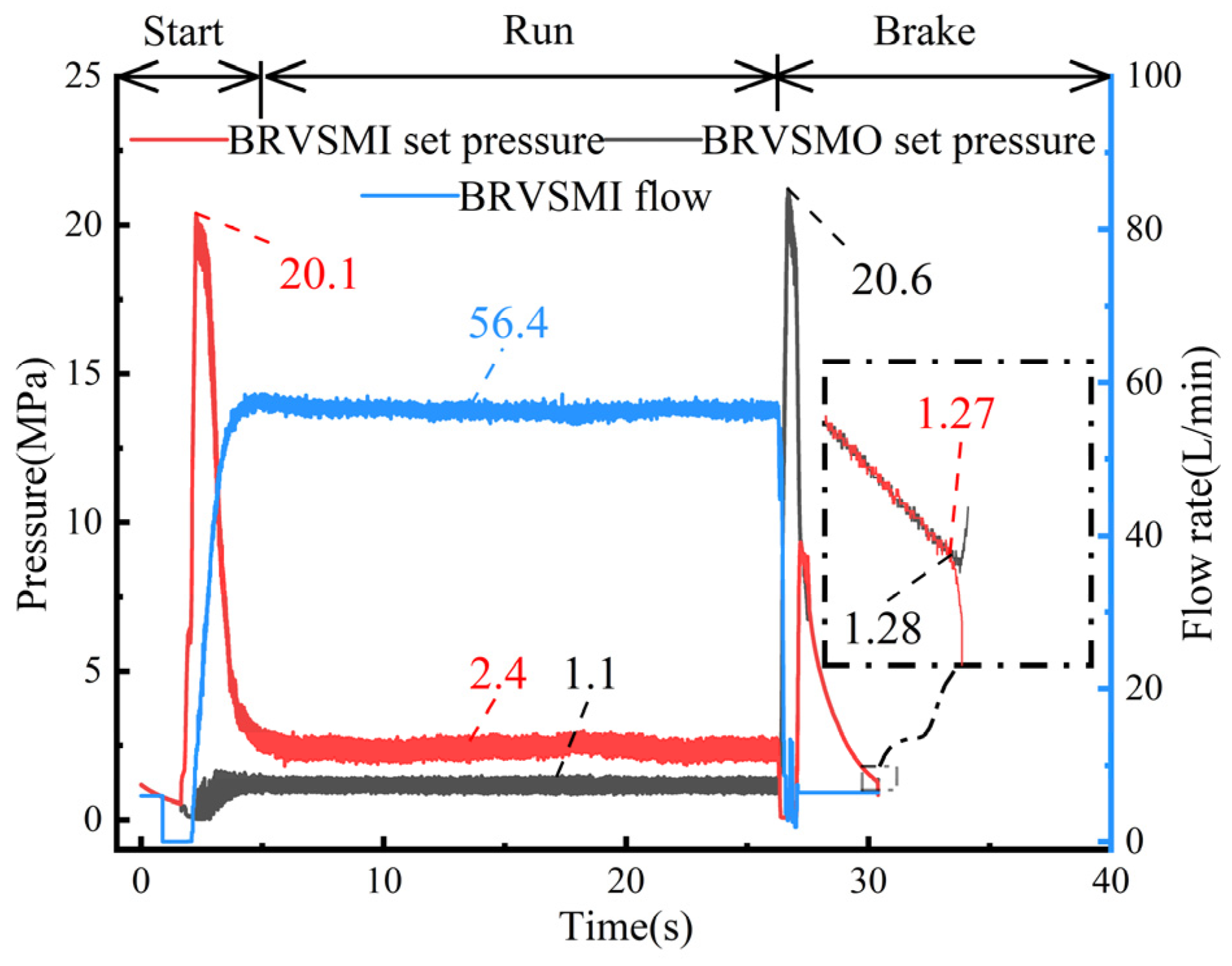
4.1. Swing Motor Complete Machine Test
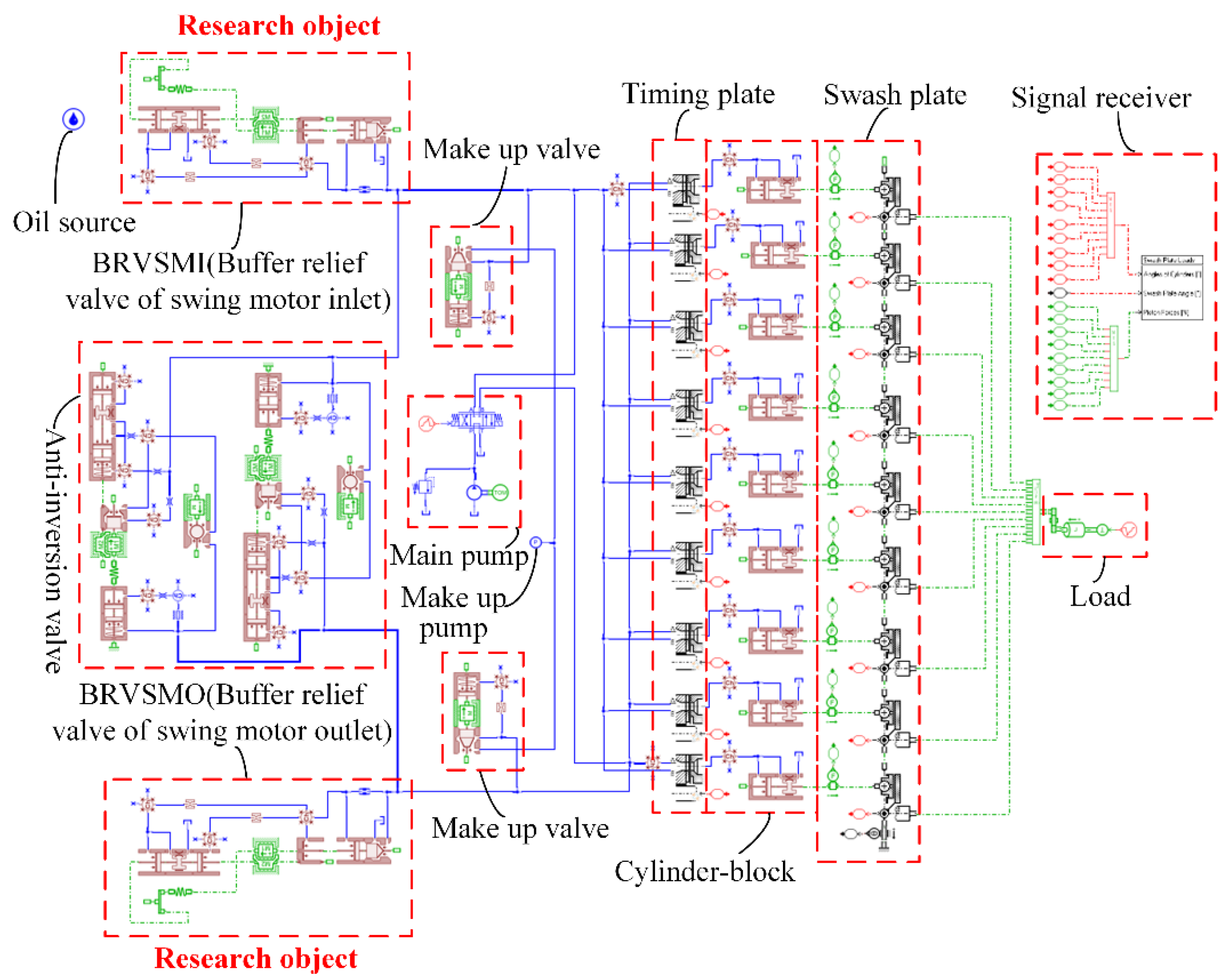
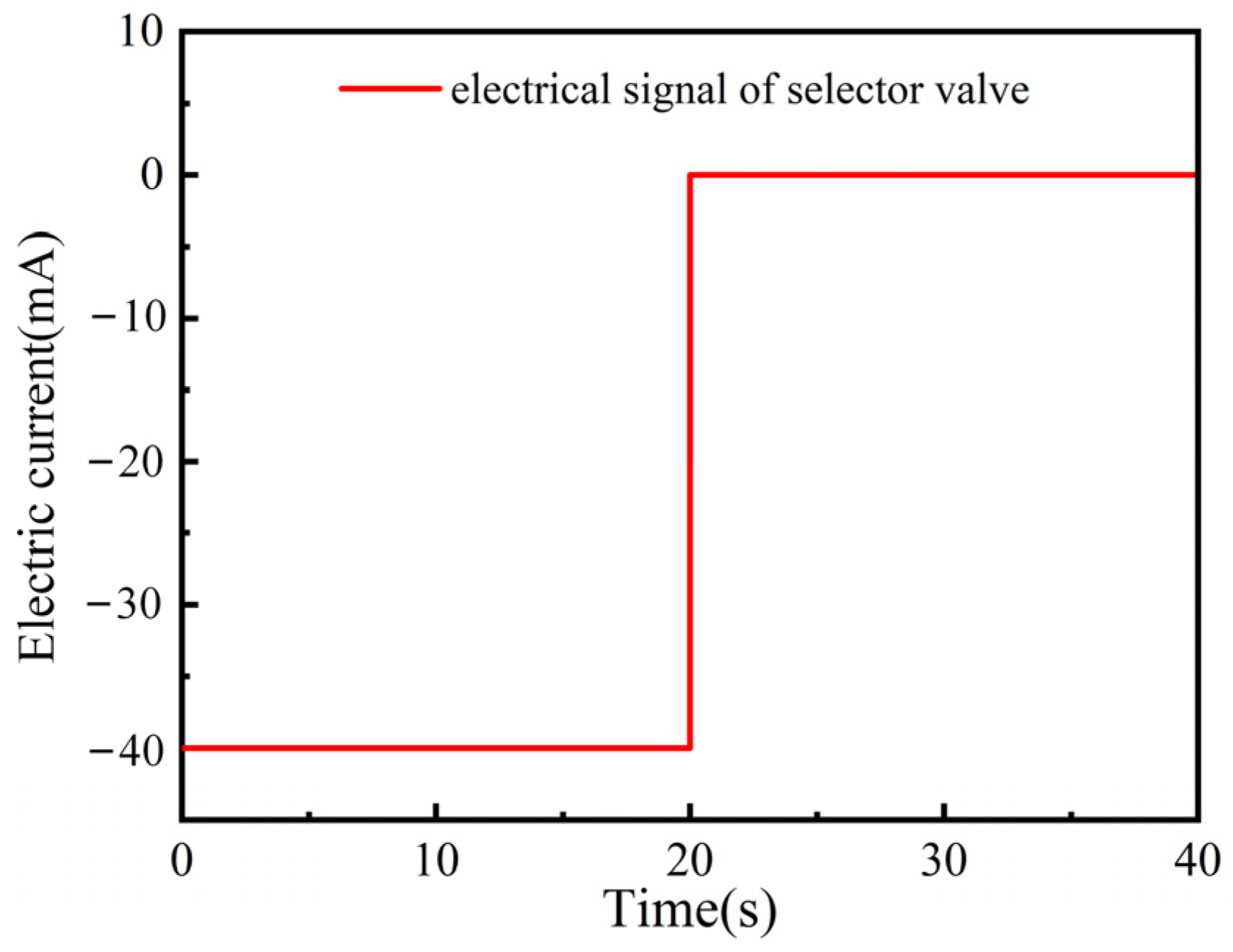
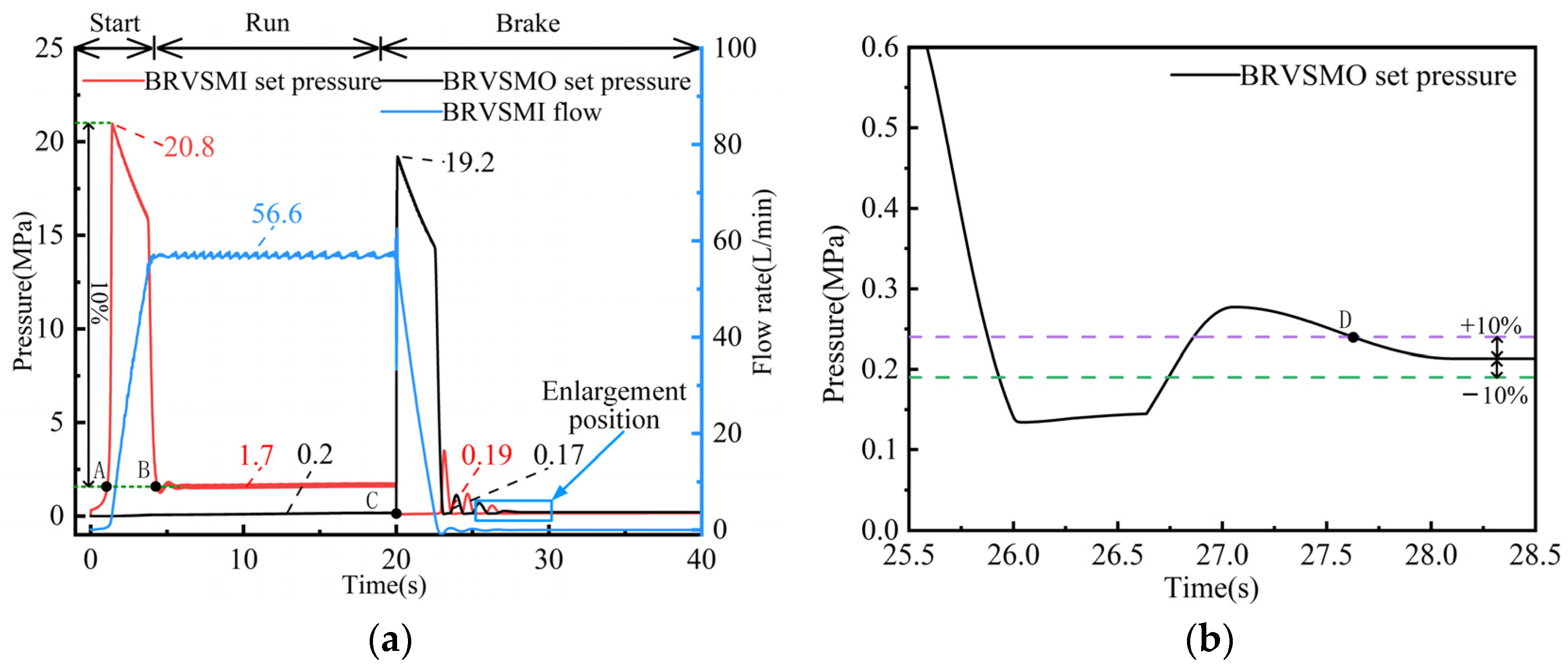
4.2. Overall AMEim Modeling of Rotary Motor
5. Results and Discussion
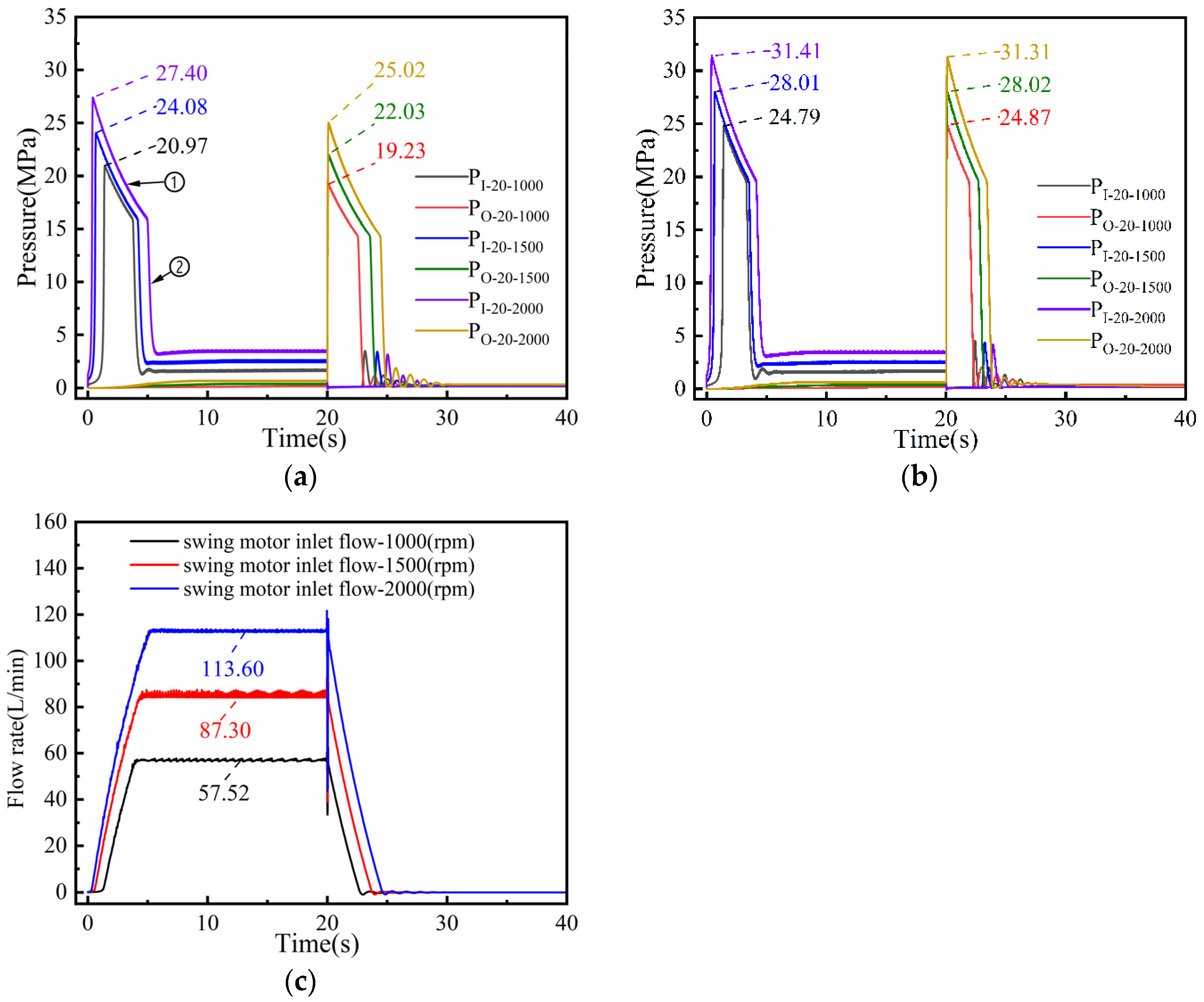
5.1. Simulated Pressure Curves of the Inlet and Outlet of the Swing Motor at 1000, 1500, and 2000 rpm
5.1.1. Dynamic Characterization of BRV Under Different Swing Motor Speeds with Spring Stiffness k = 136 N/mm and Setting Pressure at 20 MPa and 25 MPa, Respectively
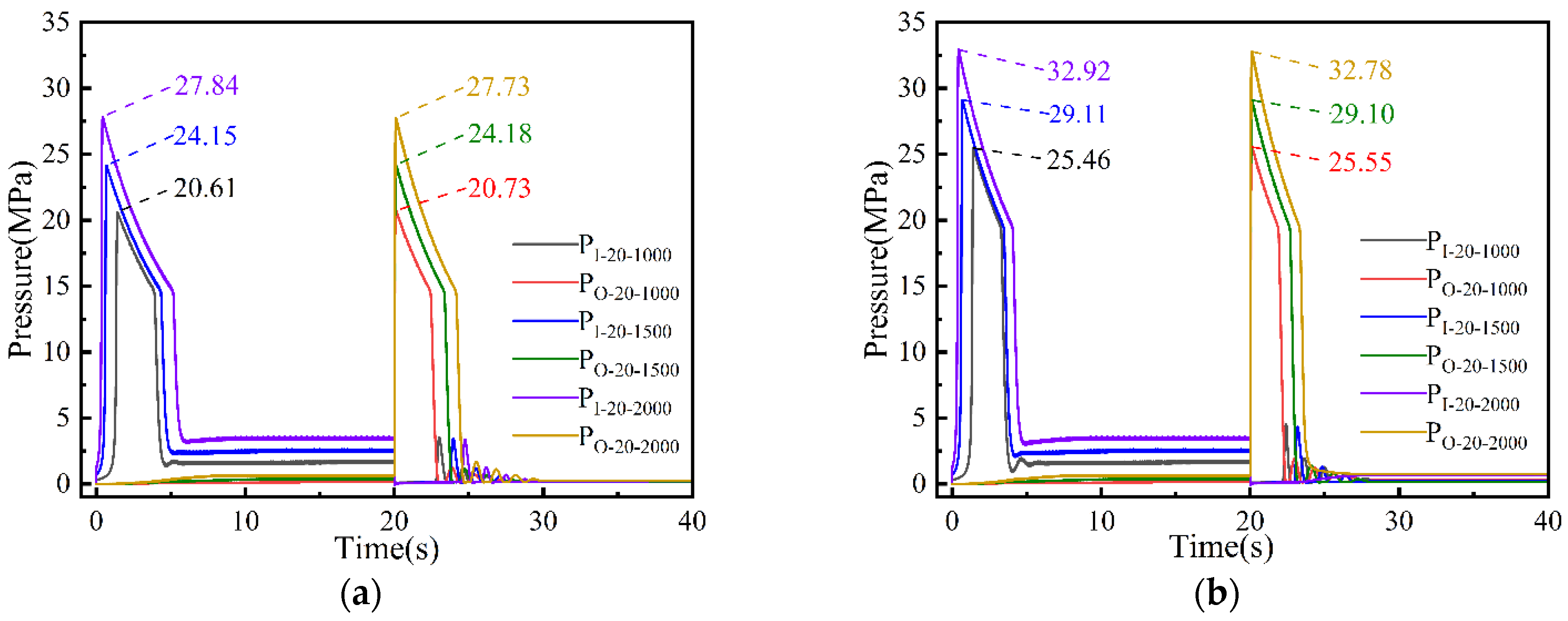
5.1.2. Dynamic Characterization of BRV Under Different Swing Motor Speeds with Spring Stiffness k = 220 N/mm and Setting Pressure at 20 MPa and 25 MPa, Respectively
5.2. Analysis of BRV Pressure Overshoot Rate and Impact Time Under Start–Stop Impact
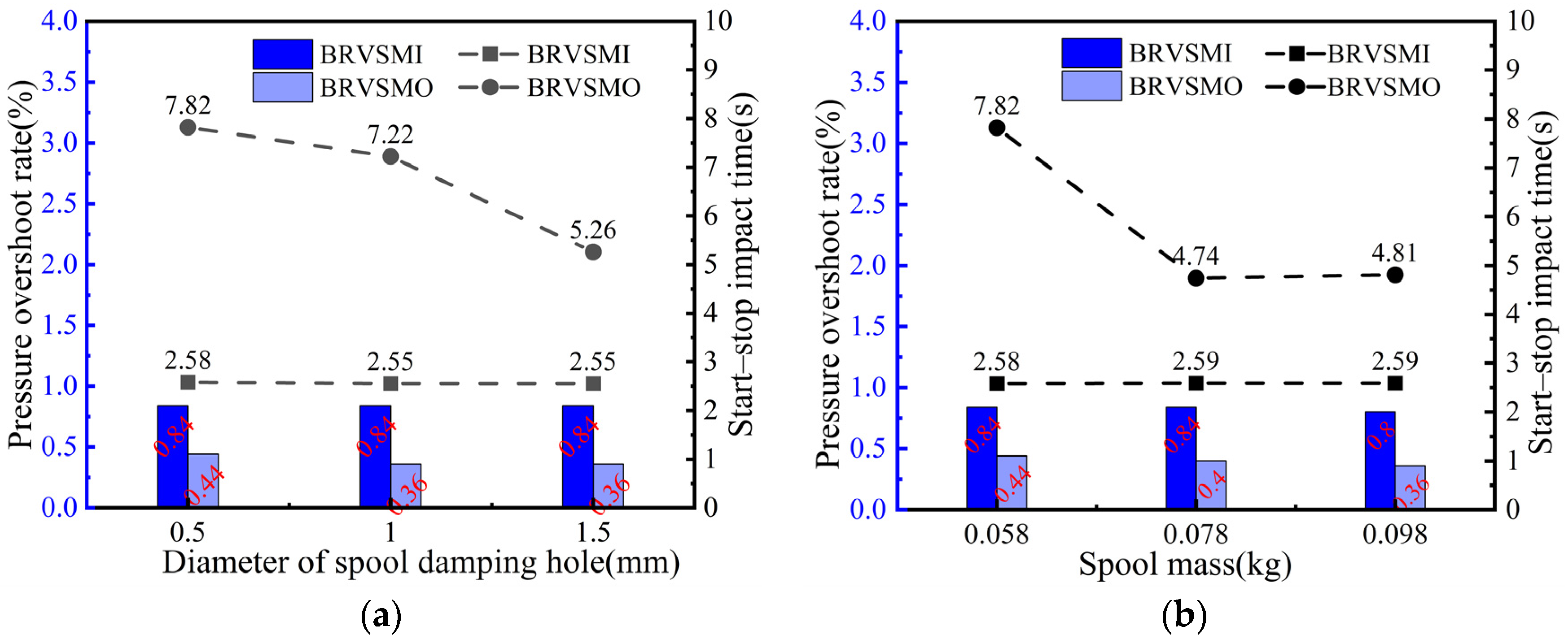
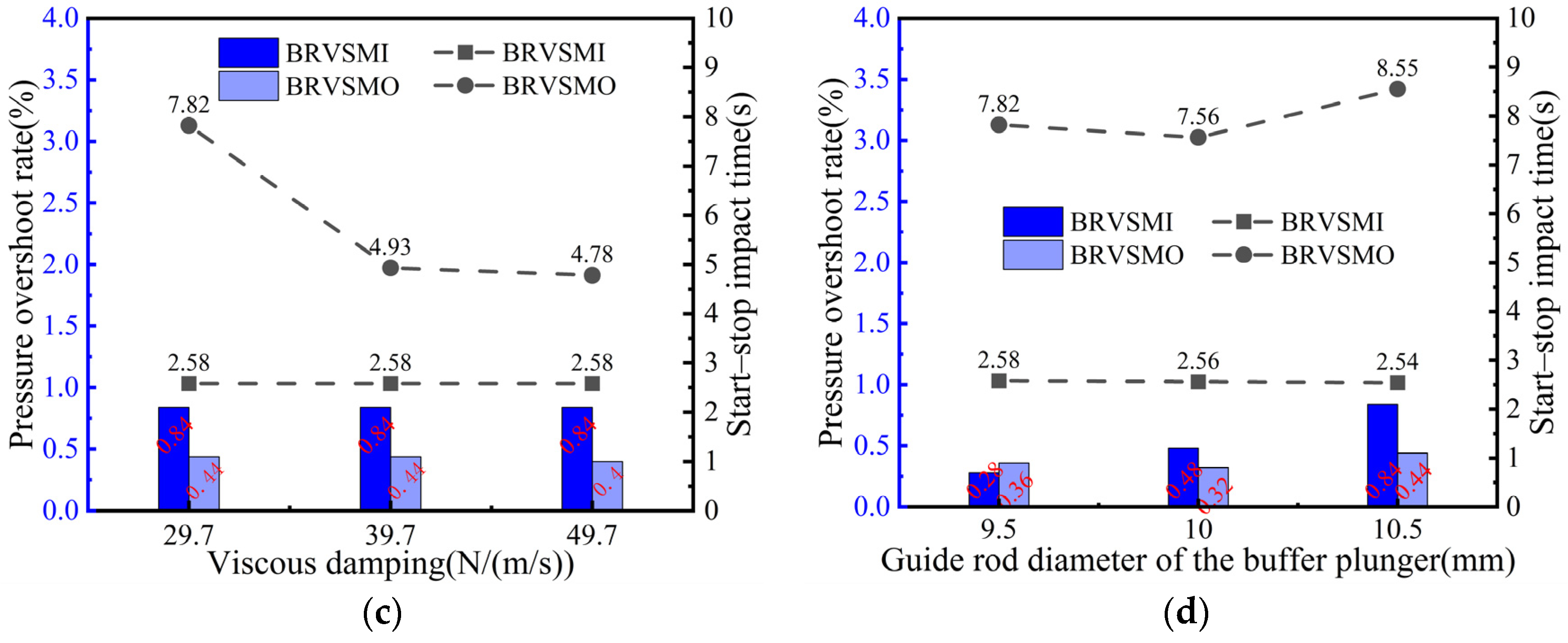
5.3. Influence of Major Structural Parameters of BRV on Dynamic Characteristics
6. Conclusions and Future Work
- (1)
- With an increase in the rotational speed of swing motor, under the same spring stiffness, the pressure overshoot rate shows an approximately positive correlation with the increasing trend. The pressure overshoot rate of the BRVSMI at the set pressure of 20 MPa is greater than that at 25 MPa, and the pressure overshoot rate of the BRVSMO is similar at a set pressure of 20 MPa and 25 MPa. With an increase in the rotational speed of the swing motor, the start–stop impact time increases approximately linearly. The start–stop impact time when the set pressure of the BRVSMI is 20 MPa is greater than the start–stop impact time when the set pressure is 25 MPa.
- (2)
- In the starting stage of the swing motor, the starting impact time of the BRVSMI is basically maintained at 2.5 s and the pressure overshoot rate is basically maintained at 0.8 under different valve core damping hole diameters, spool masses, viscous damping coefficients and guide rod diameters of the buffer plunger. In the braking stage of the swing motor, the braking impact time and the pressure overshoot rate of the BRVSMO change with the structural parameters of the BRV.
- (3)
- Under the condition of large pressure, the diameter of the damping hole, the mass of spool and the viscous damping coefficient are appropriately increased to improve the start–stop impact time and reduce the diameter of the guide rod and the diameter of the buffer plunger, which can effectively reduce the pressure overshoot rate.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Majumdar, S.K. Study on reliability modelling of a hydraulic excavator system. Qual. Reliab. Eng. Int. 1995, 11, 49–63. [Google Scholar] [CrossRef]
- Wang, D.; Guan, C.; Pan, S.; Zhang, M.; Lin, X. Performance analysis of hydraulic excavator powertrain hybridization. Autom. Constr. 2009, 18, 249–257. [Google Scholar] [CrossRef]
- Ng, F.; Harding, J.A.; Glass, J. An eco-approach to optimise efficiency and productivity of a hydraulic excavator. J. Clean. Prod. 2016, 112, 3966–3976. [Google Scholar] [CrossRef]
- Xiao, Q. Application research on rotation buffer valve in high inertia load system. Mach. Tool Hydraul. 2013, 41, 68–70. [Google Scholar]
- Zhou, H.; Liu, F.; Chen, G. Reasearch on Braking Stability of Hydraulic Excavator’s Slewing System. Comput. Simul. 2011, 28, 379–382. [Google Scholar]
- Chen, J.; Zou, Z.; Pang, X. Digging performance characterization for hydraulic excavator considering uncertainty during digging operation. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 232, 857–871. [Google Scholar] [CrossRef]
- Ning, Y.; Liu, X.; Chen, J.S.; Wang, Z.; Li, Q. Research on Dynamic Characteristic of Charging Valve of the Full Hydraulic Braking System. In Proceedings of the International Conference on Mechatronics, Robotics and Automation (ICMRA 2013), Takamatsu, Japan, 4–7 August 2013; p. 404. [Google Scholar]
- Che, Z.; Luo, K.; Teng, R.; Wei, S.; Wang, X. Dynamic characteristics analysis of rotary buffer valve based on AMESim. Mach. Tool Hydraul. 2022, 50, 115–118. [Google Scholar]
- Che, Z. Research on Simulation and Optimization of the Balance Valve for Truck Cranes. Master’s Thesis, Dalian University of Technology, Dalian, China, 2022. [Google Scholar]
- Zhao, H.; Wang, K.; Su, Q.; Deng, Y. Simulation and experimental research on counterbalance valve of rotary drilling dig hydraulic slewing system. J. Hefei Univ. Technol. 2014, 1030–1033, 1121. [Google Scholar]
- Peng, L.; Song, F.; Chen, J. Optimization design and research of unloading port of buffering overflow valve. J. Navig. Univ. Eng. 2017, 29, 67–71. [Google Scholar]
- Si, Y.; Tan, J.; Sun, K. Research on working cylinder unloading curve based on principle of energy uniform release. Forg. Stamp. Technol. 2012, 37, 91–94. [Google Scholar]
- Zhang, Y.; Xian, X.; Yu, Y. Buffering characteristics of threaded cartridge buffering overflow valve based on AMESim. J. Lanzhou Univ. Technol. 2015, 41, 40–43. [Google Scholar]
- Guo, Z.; Wu, Q.; Sun, G. Simulation of working states of excavator swing control valves. Chin. J. Constr. Mach. 2023, 21, 395–400. [Google Scholar]
- Dasgupta, K.; Karmakar, R. Dynamic analysis of pilot operated pressure relief valve. Simul. Model. Pract. Theory 2002, 10, 35–49. [Google Scholar] [CrossRef]
- Jin, K.; Park, T.; Lee, H. A control method to suppress the swing vibration of a hybrid excavator using sliding mode approach. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2012, 226, 1237–1253. [Google Scholar] [CrossRef]
- Wei, Z.; Du, J. Reinforcement learning-based optimal trajectory tracking control of surface vessels under input saturations. Int. J. Robust Nonlinear Control 2023, 33, 3807–3825. [Google Scholar] [CrossRef]
- Xue, Z.F.; Wang, Z.J.; Zhan, Z.H.; Kwong, S.; Zhang, J. Neural Network-Based Knowledge Transfer for Multitask Optimization. IEEE Trans. Cybern. 2024. [Google Scholar] [CrossRef] [PubMed]
- Dao, N.P.; Nguyen, P.Q.; Vu, H.M. Adaptive optimal coordination control of perturbed Bilateral Teleoperators with variable time delays using Actor–Critic Reinforcement Learning algorithm. Math. Comput. Simul. 2025, 229, 151–175. [Google Scholar] [CrossRef]
- Li, X. Design of Rotary Motor and Performance Research on Safety Valve. Master’s Thesis, Southwest Jiaotong University, Chengdu, China, 2009. [Google Scholar]
- Wu, M.; Wang, Z.; Luo, Y.; Xu, Y.; Yang, J. Simulation on the Performance of Axial Piston Motor Based on AMESim. Mach. Tool Hydraul. 2019, 47, 10–14. [Google Scholar] [CrossRef]
- Li, Z. Hydraulic Components and Systems, 2nd ed.; Mechanical Industry Press: Beijing, China, 2005. [Google Scholar]
- Jin, Z. Excavators; Shanghai Jiao Tong University Press: Shanghai, China, 2011; p. 370. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Parameter Value |
|---|---|
| Piston diameter (/mm) | 20 |
| Swash plate angle (/°) | 16.8 |
| Distribution plate waist groove outlet distribution circle radius (/mm) | 37 |
| Plunger orifice diameter (/mm) | 3 |
| Plunger orifice length (/mm) | 17.4 |
| Distribution plate waist groove half width (/mm) | 3.9 |
| Slipper oil seal outer diameter (/mm) | 14.6 |
| The outer ring radius of the waist groove of the distributing plate (/mm) | 40.9 |
| Radius of inner ring of waist groove of the distributing plate (/mm) | 33.1 |
| Triangular groove damping groove depth angle (/°) | 16 × pi/180 |
| Triangular groove damping groove width angle (/°) | 90 × pi/180 |
| Cylinder plunger waist groove outlet distribution circle radius () | 37 |
| The wrap angle of the outlet groove of the plunger cavity onits distribution circle (/°) | 28 × pi/180 |
| The wrap angle of the semi-circular part of the outlet groove of the plunger cavity (/°) | 7.1 × pi/180 |
| BRVSMI Start Impact Time/s | ||
|---|---|---|
| Simulation | Experiment | Error/% |
| 2.94 | 2.60 | 13 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, P.; Ji, H.; Chen, Q.; Wang, Z.; Wang, J. Investigation of the Dynamic Characteristics of the Buffer Relief Valve of a Swing Motor Under Start–Stop Impact. Processes 2024, 12, 2689. https://doi.org/10.3390/pr12122689
Dai P, Ji H, Chen Q, Wang Z, Wang J. Investigation of the Dynamic Characteristics of the Buffer Relief Valve of a Swing Motor Under Start–Stop Impact. Processes. 2024; 12(12):2689. https://doi.org/10.3390/pr12122689
Chicago/Turabian StyleDai, Pengyun, Hong Ji, Qianpeng Chen, Zhaoqiang Wang, and Jinbo Wang. 2024. "Investigation of the Dynamic Characteristics of the Buffer Relief Valve of a Swing Motor Under Start–Stop Impact" Processes 12, no. 12: 2689. https://doi.org/10.3390/pr12122689
APA StyleDai, P., Ji, H., Chen, Q., Wang, Z., & Wang, J. (2024). Investigation of the Dynamic Characteristics of the Buffer Relief Valve of a Swing Motor Under Start–Stop Impact. Processes, 12(12), 2689. https://doi.org/10.3390/pr12122689