Aized and Amjad [
14] built a model in the form of a decimal logarithm equation considering spindle speed (n = 200; 500; 800 rpm), feed speed (f = 10; 15; 20 mm/min) and drilling methods (in several passes Q = 4; 8; 12 mm). They studied the effects of the above parameters on cylindricity deviation, roundness deviation, diameter error and the Rz parameter. The researchers in [
15] presented only the roundness deviation of holes with the hole diameter as a function of feed rate (f = 56; 148; 278 mm/min) for three different cutting speeds (v
c = 7; 21; 28 m/min). They showed that an increased feed per revolution improves the dimensional accuracy of the hole; however, it worsens the roundness deviation of the hole. Vipin and co-authors [
16] proposed a model for predicting hole diameter errors, considering the following input parameters: tool material (M2 HSS; M35 HSS), tool diameter (d = 4; 8; 12 mm), spindle speed (n = 80; 160; 244 rpm), feed per revolution (f
n = 0.1; 0.125; 0.15 mm/rev) and workpiece material (HCHCr High Carbon High Chromium, H11 Hot Die Steel and EN 31 die steels). They found that drill diameter had the greatest effect on surface roughness. For hole diameter error, the most influential parameters were the tool material and the workpiece material. An interesting approach was demonstrated by the researchers in [
17], who developed models for predicting hole roundness deviation. They included three input parameters: feed rate (f = 5; 10; 15 mm/min, spindle speed (n = 2000; 3500; 5000 rpm) and coolant pressure (
p = 2; 4; 6 bars). Spindle speed had a dominant effect on improving roundness compared to the other two process parameters. A low feed rate provided good hole roundness. Singh, Kumar and Saini [
18] presented the effects of spindle speed (n = 800; 1200; 1600 rpm), feed per revolution (f
n = 0.1; 0.14; 0.18 mm/rev) and tool tip angle (118°; 127°; 135°) on hole diameter error and hole surface roughness. They showed that the most influential input parameters were tip angle (32.7%) and spindle speed (28.6%). Aamir and his co-authors [
19] did not present any mathematical model based on the results obtained for the roughness of the drilled holes. Perhaps this is because they took only feed per revolution (f
n = 0.04; 0.08; 0.14 mm/rev) and spindle speed (n = 1007; 2015; 3025 rpm) as input parameters. Holes drilled in Al6061 alloy showed the lowest surface roughness due to the low silicon content. The highest surface roughness was obtained for holes drilled in Al5083 alloy. Spindle speed had a much greater effect than feed per revolution on surface roughness, regardless of alloy type. Researchers from Italy (Angelone et al.) observed the same results [
20]. However, they found that spindle speed has a greater effect than feed per revolution. The lower the spindle speed, the lower the hole roughness obtained. In contrast, the researchers (Biermann et al.) in [
21] presented only surface roughness, including only the Rz parameter for which the input parameter was only the tool. They concluded that an improvement in the Rz parameter could be obtained by using a suitable tool coating. A different approach was demonstrated by Khanna and co-authors [
22], who examined only how the type of cooling (dry or cryogenic) affects the quality of the drilled hole. However, they did not change any of the input parameters. They found that cryogenic drilling significantly improves hole quality compared to dry drilling. A decrease in roundness deviation of 50–77%, cylindricity deviation of 13–51% and surface roughness of 47% was observed with cryogenic drilling. Several articles [
23,
24,
25,
26] examined how three different input parameters—spindle speed, feed per revolution and three different drilling strategies—affect cylindricity deviation, straightness deviation, roundness deviation and hole diameter error. The above studies show that the use of a suitable drilling strategy can significantly reduce the individual output parameters evaluated. An interesting approach was demonstrated by the researchers (Guba et al.) in [
27]. They investigated the effect of vibration support during hole drilling on the Rz parameter (in three places at the entrance of the material’s middle and at the exit). The vibration support resulted in better chip breakage, which directly translated into better-drilled hole surfaces. Al-Tameemi and co-authors [
28] studied the effects of drill coating (TiN/TiAlN, TiAlN and TiN), spindle speed (n = 1000; 2000; 3000 rpm) and feed rate (f = 50; 100; 150 mm/min) on the Rz parameter, Ra parameter, cylindricity deviation, roundness deviation, perpendicularity and hole dimension (at the bottom and at the top). They found that the worst dimension and roundness of the hole were obtained at low and medium spindle speeds and with TiN/TiAlN coatings. Tools with TiN/TiAlN coatings had the worst hole cylindricity of all coatings. Holes drilled with TiN-coated tools had the highest surface roughness. The researchers (Skrzyniarz et al.) in [
29,
30] examined how the relative displacement of the tool affects surface roughness. They also printed the drill using a direct metal laser melting method. After printing, the maximum surface height, Sz, was 67 μm. The parameter Sa was 7.74 μm. After grinding, both parameters were 11 μm and 0.86 μm, respectively. The authors in [
31] studied hole accuracy against Si
3N
4 content (0%; 5%; 10%), drill diameter (d = 6; 8; 10 mm), feed per revolution (f
n = 0.125; 0.575; 1.25 mm/rev) and spindle speed (n = 300; 580; 1160 rpm). They obtained the smallest values for the Ra parameter and hole cylindricity with a feed per revolution of 0.125 mm/rev, spindle speed of 300 rpm, drill diameter of 8 mm and Si
3N
4 content of 5%. The spindle speed had the greatest effect on the Ra parameter and the roundness of the hole. Bolat and co-authors [
32] examined what effect different values of feed per revolution (f
n = 0.05; 0.1; 0.2 mm/rev), cutting speed (v
c = 15; 30; 45 m/min) and drill diameter (d = 3; 5 mm) and different types of tool (tip angle of drill 90°; 120°; 138°) have on hole surface roughness (parameter Sa). Their study shows that a tool with a tip angle of 120° significantly reduces the surface roughness. On the other hand, it increased with increasing cutting speed. Drilling with a 5 mm drill bit reduced surface roughness compared to a 3 mm drill bit. Aamir and co-authors [
33] conducted metrological studies related to the diameter and circularity of the hole during dry machining with respect to varying technological parameters of the drilling process (n = 1500; 2500; 3500 rpm and f
n = 0.04; 0.08; 0.14 mm/rev) and two drills (HSS; carbide). They showed that spindle speed has a non-significant effect on the parameters studied. Hole quality decreases with increasing feed per revolution. Ni et al. [
34] checked how different values of technological parameters (n = 1000; 2000; 3000; 4000; 5000 rpm and f = 50; 100; 150; 200; 250 mm/min) affect surface roughness. The best surface quality was obtained when drilling with a high value of spindle speed and a low value of feed per revolution. An interesting approach was used by Jia et al. [
35], who applied a nanosecond–millisecond laser pulse in the drilling of aluminum oxide ceramics. They showed that increasing the repetition rate of millisecond pulses improved the quality of drilling. Increasing the repetition rate of millisecond pulses improved hole diameters at the hole entrance. A very interesting article was the research of Wang et al. [
36], who found that a method of producing patterned superhydrophobic surfaces can be achieved using femtosecond laser micromachining. This can produce a surface with very low surface roughness.
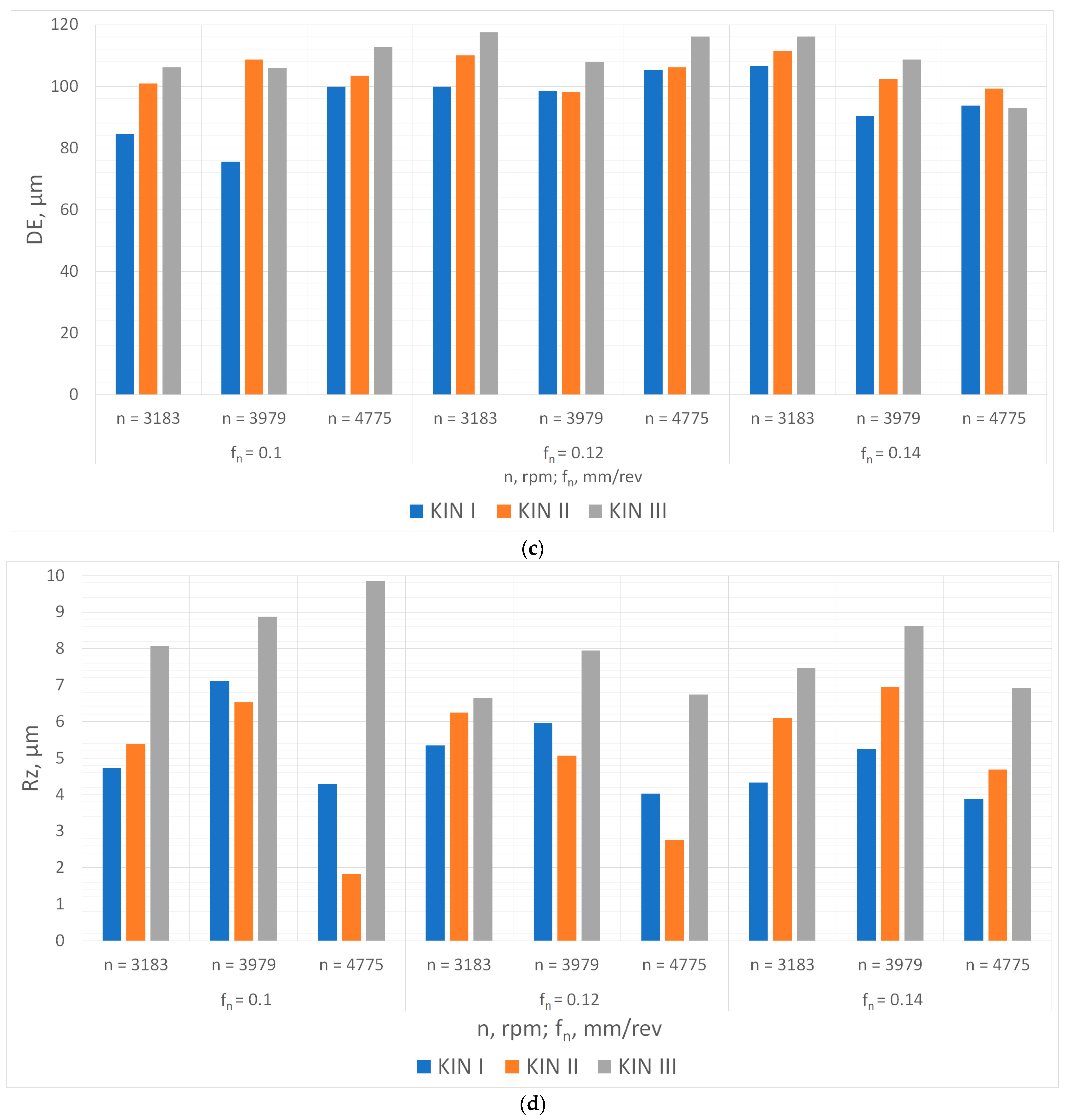
A review of the literature reveals the absence of any studies describing the combined effects of technological parameters and the choice of kinematic system on dimensional accuracy and hole surface roughness in CuZN40Pb2 brass. Most of the above studies focus on fixed technological parameters and one other selected input parameter such as tool coating, cutting fluid pressure or tool tip angle. Most of the studies focus only on single input parameters describing only surface roughness or cylindricity deviation. Therefore, we decided to measure as many as four parameters—cylindricity deviation, roundness deviation, diameter error and Rz parameter. The challenge in this research work was to arrange the experimental research methodology to be able to use different kinematic systems for the drilling process on a single station, which is presented later in this paper.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}