


Intelligent Analysis of Vibration Faults in Hydroelectric Generating Units Based on Empirical Mode Decomposition

Abstract
:1. Introduction
2. Related Works
3. Application of EMD in Signal Noise Reduction and Feature Extraction
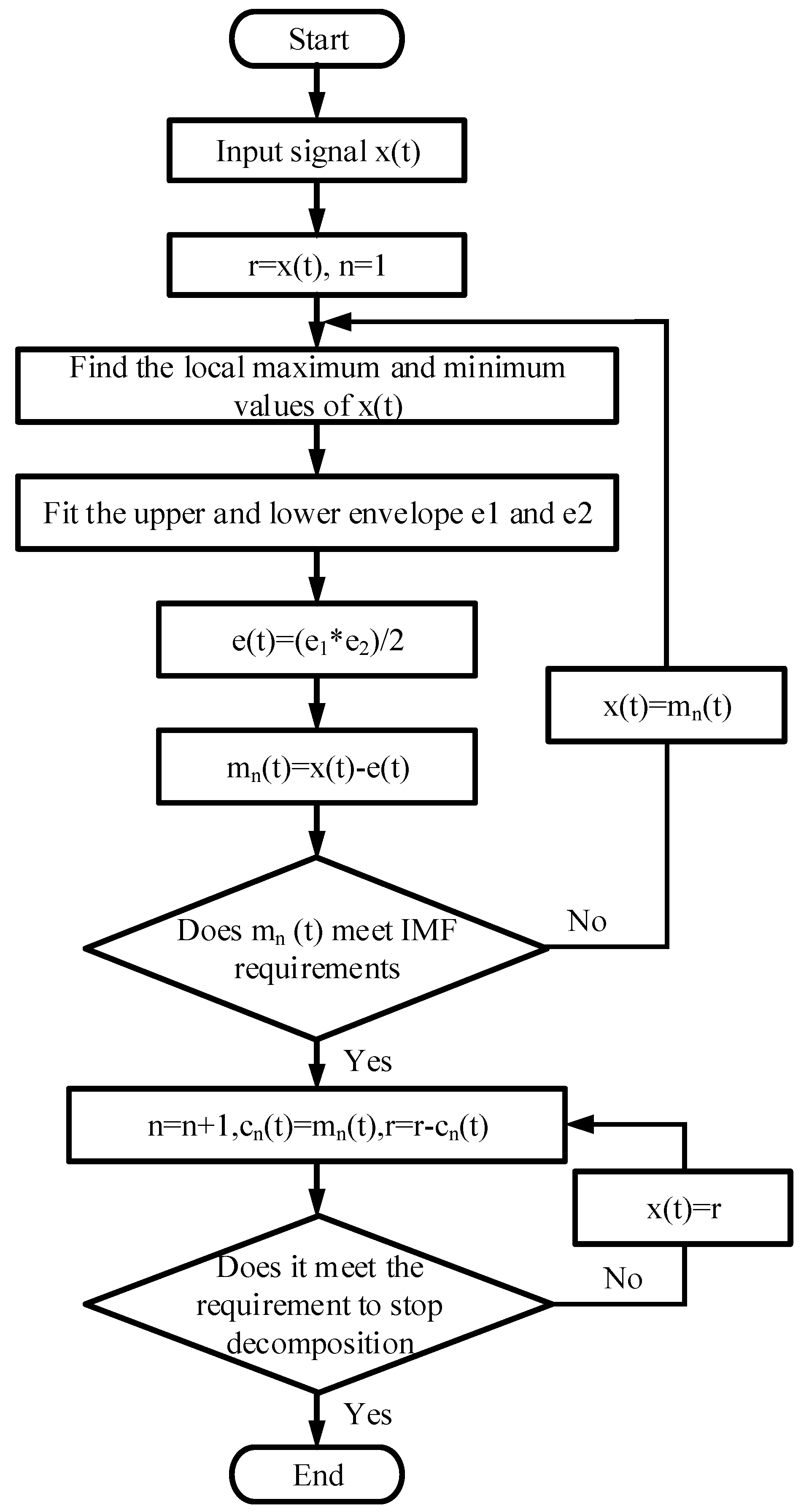
3.1. Signal Denoising Based on EMD
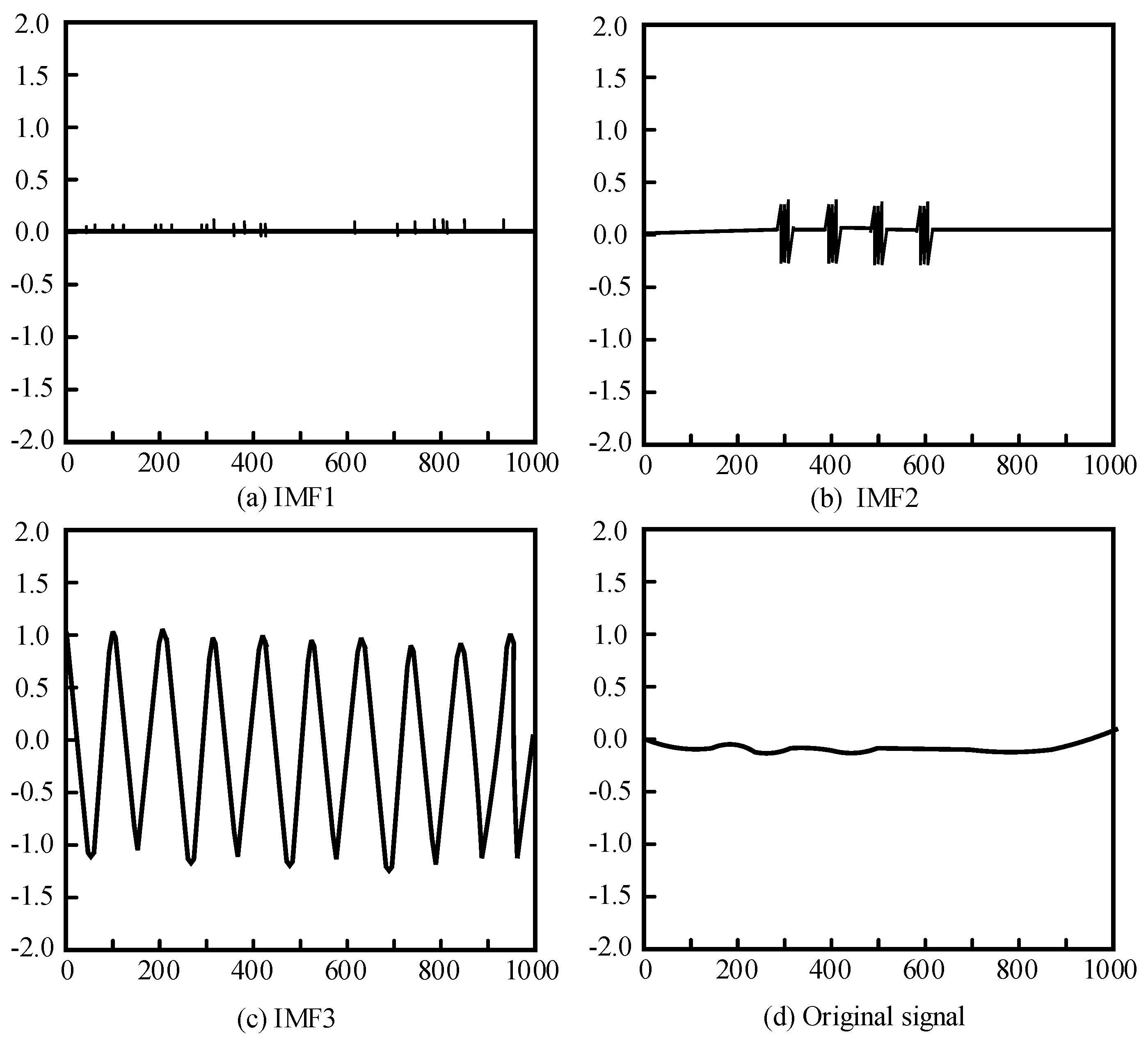
3.2. Vibration Signal Feature Extraction Based on EMD Theory
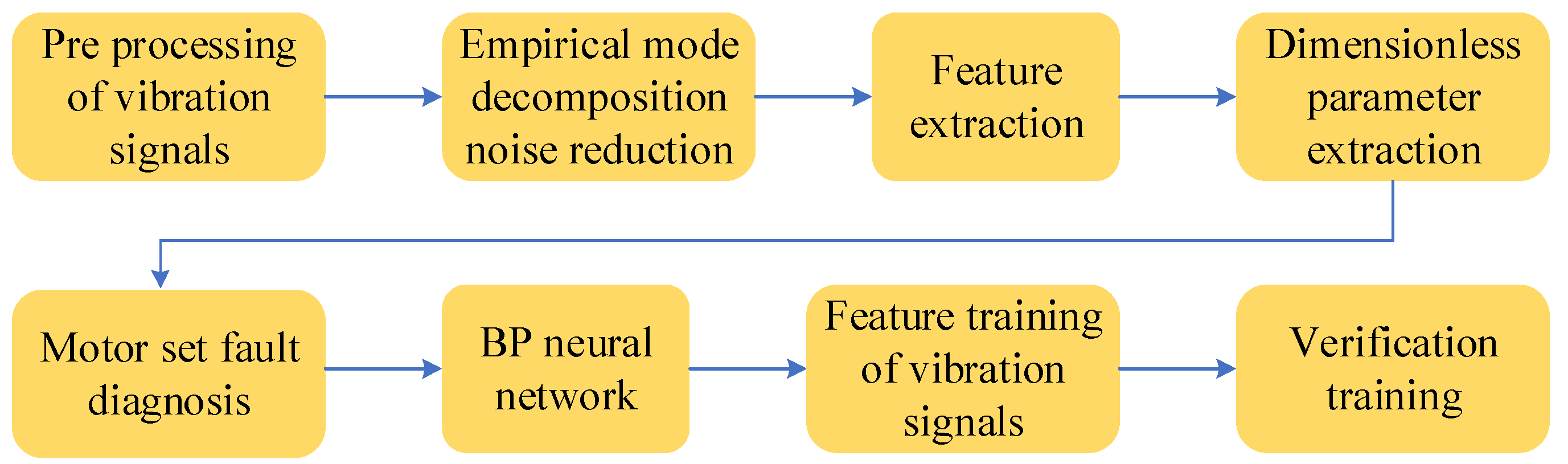
3.3. Application of BPNN in Vibration Fault Signals
4. Simulation of Vibration Signal Fault Diagnosis Experiment for Three Hydroelectric Units
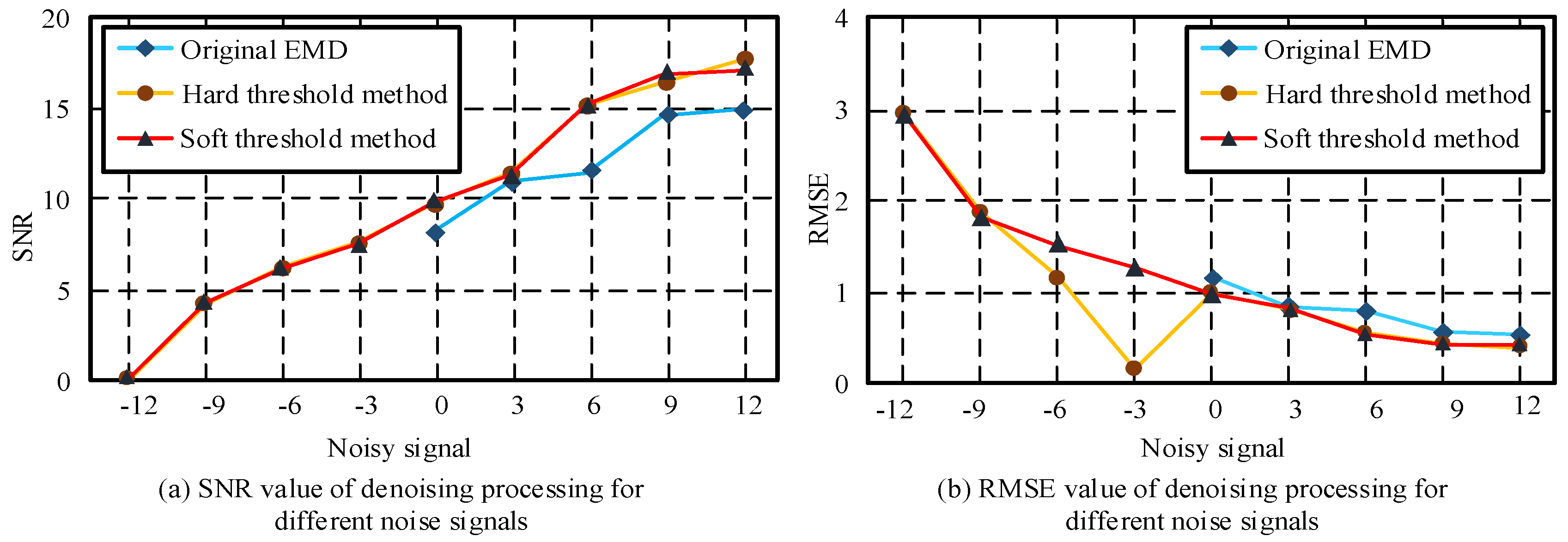
4.1. Vibration Signal Denoising Processing
4.2. Fault Signal Feature Extraction and Diagnosis
4.3. Comparison of Signal Fault Diagnosis Methods
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fan, Q.X.; Deng, Z.Y.; Lin, P.; Li, G.; Fu, J.L.; He, W. Coordinated deformation control technologies for the high sidewall—Bottom transfixion zone of large underground hydro-powerhouses. J. Zhejiang Univ. Sci. A 2022, 23, 543–563. [Google Scholar] [CrossRef]
- Pandey, M.; Winkler, D.; Vereide, K.; Sharma, R.; Lie, B. Mechanistic model of an air cushion surge tank for hydro power plants. Energies 2022, 15, 2824. [Google Scholar] [CrossRef]
- Ilak, P.; Kuzle, I.; Lin, H.; Akovic, J.; Rajsl, A.I. Market power of coordinated hydro-wind joint bidding: Croatian power system case study. J. Mod. Power Syst. Clean Energy 2022, 10, 531–541. [Google Scholar] [CrossRef]
- Xu, Y.C.; Xia, H.T.; Fang, S.C.; Lu, M. Research on APSO-WNN and its Application in Vibration Fault Diagnosis of Hydroelectric Generating Units. J. Chin. Soc. Mech. Eng. Ser. C Trans. Chin. Soc. Mech. Eng. 2021, 42, 163–172. [Google Scholar]
- Dao, F.; Zeng, Y.; Zou, Y.; Li, X.; Qian, J. Acoustic vibration approach for detecting faults in hydroelectric units: A review. Energies 2021, 14, 7840. [Google Scholar] [CrossRef]
- Rong, J.; Ge, H. April. Hydroelectric generating unit vibration fault diagnosis via BP neural network based on particle swarm optimization. In Proceedings of the 2009 International Conference on Sustainable Power Generation and Supply, Nanjing, China, 6–7 April 2009; pp. 1–4. [Google Scholar]
- Min, H.G.; Fang, Y.K.; Wu, X.; Lei, X.P.; Chen, S.X.; Teixeira, R.; Zhu, B.; Zhao, X.M.; Xu, Z.G. A fault diagnosis framework for autonomous vehicles with sensor Self-Diagnosis. Expert Syst. Appl. 2023, 224, 120002. [Google Scholar] [CrossRef]
- Xu, S.Q.; Huang, W.Z.; Huang, D.R.; Chen, H.T.; Chai, Y.; Ma, M.Y.; Zheng, W.X. A reduced-order observer-based method for simultaneous diagnosis of open-switch and current sensor faults of a grid-tied NPC inverter. IEEE Trans. Power Electron. 2023, 38, 9019–9032. [Google Scholar] [CrossRef]
- Chen, H.; Xiong, Y.; Li, S.; Song, Z.; Hu, Z.; Liu, F. Multi-sensor data driven with PARAFAC-IPSO-PNN for identification of mechanical nonstationary multi-fault mode. Machines 2022, 10, 155. [Google Scholar] [CrossRef]
- Cheng, C.; Wang, J.; Zhou, Z.; Teng, W.; Sun, Z.; Zhang, B. A BRB-based effective fault diagnosis model for high-speed trains running gear systems. IEEE Trans. Intell. Transp. Syst. 2022, 23, 110–121. [Google Scholar] [CrossRef]
- Chen, H.X.; Liu, M.M.; Chen, Y.T.; Li, S.Y.; Miao, Y.Z. Nonlinear lamb wave for structural incipient defect detection with sequential probabilistic ratio test. Secur. Commun. Netw. 2022, 2022, 9851533. [Google Scholar] [CrossRef]
- Xiong, J.; Li, C.; Wang, C.D.; Cen, J.; Wang, Q.; Wang, S. Application of convolutional neural network and data preprocessing by mutual dimensionless and similar gram matrix in fault diagnosis. IEEE Trans. Ind. Inform. 2022, 18, 1061–1071. [Google Scholar] [CrossRef]
- Hichri, A.; Hajji, M.; Mansouri, M.; Abodayeh, K.; Bouzrara, K.; Nounou, H. Genetic-algorithm-based neural network for fault detection and diagnosis: Application to grid-connected photovoltaic systems. Sustainability 2022, 14, 10518. [Google Scholar] [CrossRef]
- Khr, A.; Smm, B.; Ma, B. Lung cancer diagnosis based on chan-vese active contour and polynomial neural network. Procedia Comput. Sci. 2021, 194, 22–31. [Google Scholar]
- Li, H.T.; Yuan, S. Corrosion prediction of marine engineering materials based on genetic algorithm and BP neural network. Mar. Sci. 2021, 44, 33–38. [Google Scholar]
- Yan, J.; Pan, Z.; Tan, J.; Tian, H. Assessment of water quality by firefly algorithm based on BP neural network model. SouthtoNorth Water Transf. Water Sci. Technol. 2020, 1, 104–110. [Google Scholar]
- Chi, C.; Pan, Z.; Zhao, X.; Zhang, Y. Power converter fault classification method based on multi-feature selection algorithm. J. Northwestern Polytech. Univ. 2022, 40, 645–650. [Google Scholar] [CrossRef]
- Shi, Y.; Zhou, J.; Huang, J.; Xu, Y.; Liu, B. A Vibration Fault Identification Framework for Shafting Systems of Hydropower Units: Nonlinear Modeling, Signal Processing, and Holographic Identification. Sensors 2022, 22, 4266. [Google Scholar] [CrossRef]
- Zhang, J.; Cheng, Z. Prediction of Surface Subsidence of Deep Foundation Pit Based on Wavelet Analysis. Processes 2023, 11, 107. [Google Scholar] [CrossRef]
- Trybek, P.; Sobotnicka, E.; Wawrzkiewicz-Jałowiecka, A.; Machura, Ł.; Feige, D.; Sobotnicki, A.; Richter-Laskowska, M. A New method of identifying characteristic points in the impedance cardiography signal based on empirical mode decomposition. Sensors 2023, 23, 675. [Google Scholar] [CrossRef]
- Xu, F.H.; Wang, Z.; Liu, J.; Ning, Q.; Yu, Y. Acoustic logging information extraction and fractural volcanic formation characteristics based on empirical mode decomposition. Geophys. Prospect. Pet. 2022, 57, 936–943. [Google Scholar]
- Pei, S.; Yin, X.; Li, K. Full-time domain matching pursuit and empirical mode decomposition based sparse fixed-point seismic inversion. J. Geophys. Eng. 2022, 19, 255–268. [Google Scholar] [CrossRef]
- Ho, R.; Hung, K. EEG analysis and classification based on cardinal spline empirical mode decomposition and synchrony features. Med. Biol. Eng. Comput. J. Int. Fed. Med. Biol. Eng. 2022, 60, 2359–2372. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Jiang, W.; Zhang, S.; Sun, Y.; Zhang, S. A hydraulic pump fault diagnosis method based on the modified ensemble empirical mode decomposition and wavelet kernel extreme learning machine methods. Sensors 2021, 21, 2599. [Google Scholar] [CrossRef]
- Toma, R.N.; Kim, C.H.; Kim, J.M. Bearing fault classification using ensemble empirical mode decomposition and convolutional neural network. Electronics 2021, 10, 1248. [Google Scholar] [CrossRef]
- Liu, Z.; Zhou, J.; Zou, M.; Zhang, Y.; Zhan, L. A new method for intelligent fault diagnosis of hydroelectric generating unit. In Proceedings of the 2007 IEEE International Conference on Control and Automation, Guangzhou, China, 17–20 October 2007; pp. 1638–1642. [Google Scholar]
- Jana, D.; Nagarajaiah, S.; Yang, Y.; Li, S. Real-time cable tension estimation from acceleration measurements using wireless sensors with packet data losses: Analytics with compressive sensing and sparse component analysis. J. Civ. Struct. Health Monit. 2021, 12, 797–815. [Google Scholar] [CrossRef]
- Jana, D.; Patil, J.; Herkal, S.; Nagarajaiah, S.; Duenas-Osorio, L. CNN and Convolutional Autoencoder (CAE) based real-time sensor fault detection, localization, and correction. Mech. Syst. Signal Process. 2022, 169, 108723. [Google Scholar] [CrossRef]
- Liao, H.C.; Liao, H.C.; Gao, Y.; Gao, Y.; Wang, Q.G.; Dan, W. Development of viscosity model for aluminum alloys using BP neural network. Trans. Nonferrous Met. Soc. China 2021, 31, 2978–2985. [Google Scholar] [CrossRef]
- Kumar, P.; Tiwari, R. A review: Multiplicative faults and model-based condition monitoring strategies for fault diagnosis in rotary machines. J. Braz. Soc. Mech. Sci. Eng. 2023, 45, 282. [Google Scholar] [CrossRef]
- Zabin, M.; Choi, H.J.; Uddin, J. Hybrid deep transfer learning architecture for industrial fault diagnosis using Hilbert transform and DCNN–LSTM. J. Supercomput. 2023, 79, 5181–5200. [Google Scholar] [CrossRef]
- Wu, Y.; Zhang, Z.; Li, Y.; Sun, Q. Open-circuit fault diagnosis of six-phase permanent magnet synchronous motor drive system based on empirical mode decomposition energy entropy. IEEE Access 2021, 9, 91137–91147. [Google Scholar] [CrossRef]
- Wei, M.; Hu, X.; Yuan, H. Residual displacement estimation of the bilinear SDOF systems under the near-fault ground motions using the BP neural network. Adv. Struct. Eng. 2022, 25, 552–571. [Google Scholar] [CrossRef]
- Abou-Abbas, L.; Noordt, S.V.; Desjardins, J.A.; Cichonski, M.; Elsabbagh, M. Use of empirical mode decomposition in erp analysis to classify familial risk and diagnostic outcomes for autism spectrum disorder. Brain Sci. 2021, 11, 409. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Fan | Water Pump | ||||||
|---|---|---|---|---|---|---|---|---|
| Precision | Recall | F1 | AUC | Precision | Recall | F1 | AUC | |
| Adaptive filtering algorithm [32] | 0.9049 | 0.5672 | 0.6753 | 0.6712 | 0.7447 | 0.6773 | 0.6886 | 0.7437 |
| BP neural network [33] | 0.8926 | 0.1724 | 0.2672 | 0.6315 | 0.7722 | 0.2060 | 0.3142 | 0.6865 |
| EMD + SVM [34] | 0.8528 | 0.2152 | 0.3264 | 0.6019 | 0.7529 | 0.3662 | 0.4733 | 0.6875 |
| This paper | 0.9405 | 0.4172 | 0.5356 | 0.7365 | 0.7375 | 0.5162 | 0.5753 | 0.7335 |
| Method | Slide Rail | Valve | ||||||
| Precision | Recall | F1 | AUC | Precision | Recall | F1 | AUC | |
| Adaptive filtering algorithm [32] | 0.8487 | 0.7743 | 0.8069 | 0.8651 | 0.6671 | 0.2836 | 0.3968 | 0.6763 |
| BP neural network [33] | 0.6202 | 0.0490 | 0.0888 | 0.6376 | 0.3132 | 0.0388 | 0.0684 | 0.4825 |
| EMD + SVM [34] | 0.7365 | 0.1979 | 0.3101 | 0.5845 | 0.6151 | 0.1786 | 0.2764 | 0.5152 |
| This paper | 0.8947 | 0.9007 | 0.8957 | 0.9232 | 0.8763 | 0.6712 | 0.7355 | 0.9141 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, H.; Yang, L.; Ji, P. Intelligent Analysis of Vibration Faults in Hydroelectric Generating Units Based on Empirical Mode Decomposition. Processes 2023, 11, 2040. https://doi.org/10.3390/pr11072040
Tian H, Yang L, Ji P. Intelligent Analysis of Vibration Faults in Hydroelectric Generating Units Based on Empirical Mode Decomposition. Processes. 2023; 11(7):2040. https://doi.org/10.3390/pr11072040
Chicago/Turabian StyleTian, Hong, Lijing Yang, and Peng Ji. 2023. "Intelligent Analysis of Vibration Faults in Hydroelectric Generating Units Based on Empirical Mode Decomposition" Processes 11, no. 7: 2040. https://doi.org/10.3390/pr11072040
APA StyleTian, H., Yang, L., & Ji, P. (2023). Intelligent Analysis of Vibration Faults in Hydroelectric Generating Units Based on Empirical Mode Decomposition. Processes, 11(7), 2040. https://doi.org/10.3390/pr11072040