1. Introduction
The carrot is a delicious, crispy, and nutrient-rich vegetable. It can be eaten raw or cooked, as well as being juiced, salted, and dried or acting as fodder. Li Shizhen called it “the King of vegetable” [
1]. The planting area and total production of carrots in China are the highest in the world [
2], but most areas still use manual harvesting and semi-mechanized harvesting. Manual harvesting has the problems of a high labor intensity and low efficiency, while semi-mechanized harvesting has a high economic cost, which cannot meet the requirements of large-scale carrot harvesting.
Soil loosening is an important link of mechanized carrot harvesting, which directly affects the resistance and missing carrot rate [
3]. Therefore, it is an effective way to promote mechanized carrot harvesting to improve the performance of carrot combine harvester shovels. Chong et al. [
4] explored a wedge self-lubricating subsoiling shovel that was compared with a traditional subsoiling shovel under lubrication. The tillage resistance was reduced by 14.60~21.17%, and the average drag reduction rate was 18.28%, showing an obvious drag reduction effect. Askari et al. [
5] developed a bending-wing subsoiling shovel with bending angles of 10° and 20°. The test results showed that the soil disturbance and uplift area were increased by adding a wing to the subsoiling shovel handle, and the wing with a bending angle of 10° performed the best and, thus, can be used as an attachment for subsoiling shovels. Cheng et al. [
6] analyzed the effects of a chisel shovel, arrow shovel, and wing shovel on the soil breakage rate and soil disturbance. The results revealed that the shape of the bionic soil shovel had an important impact on the soil disturbance process, and the wing subsoiling shovel presented the highest soil disturbance and highest resistance. Aday et al. [
7] investigated the influence of different blade angles on the resistance of a subsoiling shovel. When the blade angle was 25°, the resistance, disturbance area, and energy utilization efficiency were superior to those obtained with other angles. However, there are differences in the soil quality of different carrot-planting regions, as well as in the structure and material of soil-loosening shovels. The above studies did not conduct corresponding experimental studies on the soil of carrot-planting areas in the northeast black land, so the corresponding subsoiling shovels cannot be applied to carrot harvesting in the northeast black land.
Bionic design can effectively improve the performance of soil-loosening components. Wei et al. [
8] took bamboo rats and antlion larvae, which are good at digging, as the bionic objects to build 3D surfaces of the bamboo rat paw and antlion larva back through reverse engineering and designed a slant column subsoiling shovel, which effectively reduced the subsoiling resistance, with a maximum reduction of 12.92%. Qiu et al. [
9] designed a corrugated bionic subsoiling shovel by using the resistance reduction mechanism of the corrugated surface of earthworms. Through the simulation analysis of ANSYS/LS-DYNA software, they found that the tillage resistance of the corrugated bionic subsoiling shovel was significantly lower than that of the original subsoiling shovel, the theoretical service life was longer than that of the original subsoiling shovel, and the working performance was more reliable than that of the original subsoiling shovel. Gowripathi et al. [
10] selected the crank–rocker mechanism for vibrating subtillage in banana planting. The trajectory required by the crank–rocker mechanism of the bionic vibrating subsoiling shovel machine was examined via kinematic analysis. The speed and acceleration required for operating the tillage tool were determined. The experiment indicated that the working efficiency of the bionic vibrating subsoiling shovel was improved by about 30% compared to that of the traditional subsoiling shovel, which greatly improved the planting rate of bananas. Li et al. [
11] developed a bionic subsoiling component based on the brown bear paw and studied the effects of factors such as the bionic subsoiling angle and tillage depth on the tillage resistance and soil disturbance. Zhang et al. [
12] explored a bionic subsoiling shovel with the head of the sandfish lizard as the bionic prototype by using reverse engineering technology. The discrete element method was applied for analysis, finding that the bionic soil-loosening shovel required a low traction force, and its drag reduction rate was 8.34~19.31%. Q et al. [
13] designed a bionic subsoiling shovel based on the shape of the armadillo claw, aiming to effectively break the soil by reducing its friction and adhesion to cutting tools. The claw toe contour was obtained by using CAD technology. The effectiveness of the bionic design was verified by comparing its results with the results obtained from a traditional subsoiling shovel. The bionic design reduced the horizontal and vertical drag by 36.6% and 58%, respectively. Zhang et al. [
14] researched a drag-reducing subsoiling shovel with an exponential function curve-type blade by fitting the paw curve of a mouse. The test results showed that the bionic design significantly reduced the tillage resistance of the subsoiling shovel. S et al. [
15] evaluated the sustainable subsoiling performance of a bionic integral subsoiling shovel (SIB), multiple plows (M), a subsoiling shovel (S), a disc plow (AD), and a disc harrow (Ra). It was found that the SIB and M had a greater working width and required a greater pulling force and less fuel consumption per hectare. The operating speed of the SIB had a direct impact on its operating performance, and the performance was 33.8% better than that of a traditional subsoiling shovel. The SIB represents a sustainable option for the primary tillage of soil, which can be an alternative to traditional tillage. Zhang et al. [
16] designed and produced the variable curvature drag-reducing structure of a subsoiling shovel by using the contours of the vole paw toe as a bionic prototype curve, which can allow the machine to have a low working resistance within a wide range of working speeds and achieve the goal of subsoiling drag reduction under high-speed operation.
The position of the bionic soil shovel installation in carrot combine harvesters is located under the pulley, the shovel handle is located under the machine and the frame hinges, and the shovel wing and bionic shovel are located under the pulley and the shovel handle solid connection. The whole machine works under the traction of the tractor’s forward movement, with the shovel tip penetrating the soil and dragging the soil particles along the inside of the bionic shovel tip. The soil between the carrot rows is disturbed by the spatula wing to reduce the adhesion between the carrots and the soil. The spatula handle breaks the surface soil, and the soil particles slide backward along the surface of the spatula. When the spatula tip moves to the center of the carrot, the carrot tassel is in an upright state through the rotation of the harvester, and under the action of the conveyor belt, the carrot tassel is clipped to the rear. As a result, the carrot-loosening, digging, and conveying operations are completed. However, due to the poor soil disturbance performance of carrot combine harvesters, their resistance is high, the carrot leakage rate is high, and the working efficiency is low. Moreover, a special soil shovel has not been developed in combination with the carrot production mode and the requirements of harvesting agriculture, and this affects the working quality and power consumption of the machine.
The performance of the soil-loosening shovel directly affects the quality of carrot harvesting. The high resistance leads to an increase in power consumption, and the poor disturbance of the soil-loosening shovel increases the missing carrot rate. In order to effectively improve the soil disturbance, the structure of the soil-loosening shovel wing is typically increased, but this also significantly increases its resistance [
17,
18,
19]. Therefore, the structural size of the soil-loosening shovel wing is optimized to effectively reduce the resistance under the premise of increasing soil disturbance. In this study, the physical parameters of the soil and carrots were measured in Qingfeng Village, Harbin City, Heilongjiang Province, China, including the soil water content, soil bulk density, soil firmness, carrot geometric parameters, root tensile strength, and pulling force. Taking the badger claw structure as a bionic prototype, the external outline of the badger claw was extracted using a 3D contact-free reverse scanner, and a 3D digital design was carried out. The surface structure of the creature and its low-resistance and low-disturbance characteristics were completely extracted and optimized, and then manufacturing and production were complemented by metal 3D printing technology, so as to design a bionic drag-reducing subsoiling shovel with a badger claw structure for carrot harvesting. A discrete element model of the soil, carrots, and soil particles was constructed, and a virtual simulation test was carried out to explore the interaction between the bionic drag-reducing subsoiling shovel, soil, and carrots. A single-factor test was performed with the operating speed, sliding angle of the shovel handle, opening angle of the blade, and inclination angle of the blade as the test factors; and the resistance, carrot-pulling force, and soil disturbance were the test indexes. This study aimed to explore the effect of the structural parameters of a highly efficient drag-reducing bionic soil-loosening shovel on its operation quality when used on a carrot combine harvester, so as to solve the problems of the low soil disturbance, high resistance, and high missing carrot rate of soil-loosening shovels and improve the harvest quality and efficiency of carrot combine harvesters.
2. Materials and Methods
The physical parameter measurement of the soil and carrots is an important means to improve the adaptability and performance of carrot combine harvesters. In this section, the black soil of Qingfeng Village (46°42′38.7″ N, 129°58′31.1″ E), Harbin City, Heilongjiang Province, and the carrot “Hongsheng Qicun” planted in this area were selected as the research objects to determine the physical parameters, such as the soil solidity, water content, bulk density, and carrot geometric and mechanical parameters. This can provide a theoretical foundation for the structural design of a high-efficiency drag-reducing bionic soil-loosening shovel, as well as providing the theoretical basis and boundary conditions for simulation analysis.
2.1. Measurement of Soil Physical Parameters
2.1.1. Measurement of Soil Water Content
The soil water content is an important physical parameter of soil, reflecting the ratio of soil to water. Changes in the soil water content will cause changes in the soil mechanical properties, such as cohesion and plasticity [
20]. In the process of mechanized carrot harvesting, the soil water content has an important effect on the carrot-pulling force and directly affects the carrot harvesting quality. Due to its easy operation and high precision, this study adopted the drying method to measure the water content of the soil in the experimental field [
21]. In the experimental field, the tillage layer (0~100 mm), plow layer (100~200 mm), and subsoil layer (200~300 mm) of 5 sites were randomly selected for soil sampling [
22], labeling the soil sampling box and calculating the soil water content according to Equation (1):
where
Sm is the soil water content, %;
m0 is the mass of the empty soil box, g;
m1 is the total mass of the soil and box before drying, g;
m2 is the total mass of the soil and box after drying, g.
According to the measured data and Equation (1), the average soil moisture content of the plow layer in the test field was 11.63%, the average soil moisture content of the plow bottom layer was 14.41%, and the average soil moisture content of the core soil layer was 18.21%. The soil water content and soil viscosity at the test site were high. Under these conditions, the soil is in close contact with the carrot roots, and this is not conducive to carrot harvesting.
2.1.2. Measurement of Soil Bulk Density
The mass or weight of soil per unit volume under the natural state is called the soil bulk density [
23]. The soil bulk density reflects the bulkiness and plasticity of soil, as well as the contact state between the soil and carrots. The higher the soil bulkiness, the easier it is for carrots to be harvested; otherwise, carrots are hard to harvest. In order to construct the theoretical parameter model of the soil–crop accurately, the soil bulk density of each tillage layer was measured. As the soil of the test field was medium clay, which is soft and can easily clump, the cutting ring method was used in this paper to measure the soil bulk density of the test site [
24]. According to Equation (2), the soil bulk density of different plow layers was calculated:
where
dvi is the soil bulk density of the
ith soil sample, g·cm
−3;
V is the cutting ring volume, cm
3;
Mi is the mass of the
ith soil sample, g; and
Wi is the soil water content, %.
The average soil bulk density of the cultivated layer in the test field was 1.236 g/cm3, the soil bulk density of the plow bottom layer was 1.433 g/cm3, and the soil bulk density of the core soil layer was 1.508 g/cm3.
2.1.3. Measurement of Soil Firmness
Soil firmness is the compactness of the soil particle arrangement, also known as soil hardness [
25]. In clay soil, carrots are in close contact with the soil particles, resulting in an increased pulling force being required for carrot harvesting and an increased missing carrot rate. Soil firmness also has a significant influence on the resistance of soil-loosening shovels. The average firmness of the cultivated layer in the test field was 786 kPa, that of the plow bottom layer was 1536 kPa, and that of the core soil layer was 2632 kPa.
2.2. Measurement of Carrot Physical Parameters
2.2.1. Measurement of Carrot Geometric Parameters
The geometric parameters of carrots are a significant basis for designing soil-loosening shovels of carrot combine harvesters [
26,
27]. The key geometric parameters of carrots were measured, including the length of the carrot stem and leaf, root length, maximum root diameter, minimum root diameter, diameter of the tassel junction, and diameter of the stem and leaf. The main distribution interval of the carrot stem and leaf length was (350, 600) mm; the main distribution interval of the root length was (125, 225) mm; the main distribution interval of the maximum root diameter was (27, 51) mm; the main distribution interval of the minimum root diameter was (2, 8) mm; the main distribution interval of the diameter of the tassel junction was (9, 15) mm; and the main distribution interval of the stem and leaf diameter was (6, 22) mm.
2.2.2. Measurement of Carrot Root Tensile Properties
In order to solve the common problem whereby the carrot tassels break during carrot combine harvesting, leading to high missing carrot rates, the tensile characteristics of the carrot roots were measured [
28,
29]. A metal probe was vertically inserted into the soil surface for measurement using an SL-TYA firmness tester. The indicator number of the tester was read after it became stable. The tensile strength of the carrot stem and leaf, the maximum breaking force of the tassel junction, and the breaking position were selected as measuring indexes. The breaking condition of the carrots was determined by adjusting the loading speed and the carrot-clamping position of the universal testing machine. According to Equation (3), the tensile strength of carrot roots under different loading speeds was calculated:
where
σi is the tensile strength of the
ith carrot root, Pa;
Fi is the peak pulling force of the ith carrot tassel junction fracture, N; and
Di is the diameter of the
ith carrot tassel junction fracture, mm.
The test results of carrot tensile strength are shown in
Table 1. The maximum breaking force of the carrot stem and leaf decreases along the direction of cellulose and decreases with the decrease in the diameter of the carrot stem and leaf. The tensile strength of the carrot stem and leaf increases with the increase in loading speed and decreases with the increase in clamping height.
2.2.3. Measurement of Carrot-Pulling Force
The carrot-pulling force is an important evaluation index to measure the performance of soil-loosening shovels during carrot mechanized harvesting [
30]. The research on the cohesion between carrots and soil and the carrot breaking conditions provides a theoretical basis for the subsequent structural design and virtual simulation test of soil-loosening shovels.
Carrots of similar size were selected to measure the pulling force. A transparent adhesive strip was fixed on the upper part of the carrot stem and leaf, and the pull meter was pulled to make the carrot move slowly along the pulling direction. The peak pulling force of the carrot was obtained by observing the indicator of the pull meter.
It can be seen in
Table 2 and
Table 3 that when the extraction angle exceeds 35°, the carrot extraction force increases significantly; when the soil-loosening depth exceeds 200 mm, the carrot extraction force tends to be stable; and when the soil-loosening depth exceeds 250 mm, the carrot extraction force reaches its minimum value.
The results indicate that the effect of carrot pulling is closely related to the pulling angle and the soil-loosening depth. The carrot-pulling force increases with the increase in the carrot-pulling angle. The soil-loosening depth greatly impacts the carrot-pulling force; that is, the carrot-pulling force decreases with the increase in soil-loosening depth.
2.3. Structure Design of Bionic Soil-Loosening Shovel Based on the Geometric Structure of the Badger Claw Toe
The badger, which has curved, conical, hard, and powerful claw toes, has a strong ability to plow. Its front claw toe presents excellent drag-reducing ability [
31,
32]. In this study, the special curve structure of the inner side of the badger claw toe was combined with its complex surface microstructure through the bionics principle, which was applied to the structural design of the soil-loosening shovel of a carrot combine harvester, so as to achieve the purpose of drag reduction. This study also selected the stronger middle finger of the five claw toes of a naturally dead badger as the bionic object for the design of the soil-loosening shovel, as shown in
Figure 1.
The badger claw toe has a complex microscopic curve structure. The 3D data of the claw toe were obtained using a non-contact method. The non-contact 3D scanner EinScan Pro 2x produced by the SHINING 3D Company was used to scan the claw toe. Point cloud smoothing and clutter elimination optimization were performed on the obtained claw toe point cloud data, so as to obtain smooth and accurate point cloud data. Then, the optimized point cloud model was wrapped and filled using Geomagic Design X software to obtain the 3D model of the badger claw toe [
33,
34,
35], as shown in
Figure 2.
In order to explore the drag reduction mechanism of the inner structure of the badger claw toe, the curve equation of the inner side of the badger claw toe was fitted and analyzed [
36]. The obtained 3D model of the badger claw toe was imported into Solidworks software. Then, we took sampling points in sequence and recorded the data. The sampling data were imported into the function plotting software Origin for curve fitting, so as to obtain the curve fitting equation of the inner side of the claw toe:
The correlation coefficient of the fitting curve was
R2 = 0.95815. The 3D model of the badger claw toe was imported into Solidworks software for proportional amplification. In order to ensure the adaptability of the model, 10-times magnification was selected, and the soiling angle of the soil-loosening shovel was
γ = 25° according to the planting mode and growing characteristics of carrots and the existing structural parameters of the soil-loosening shovel and the soiling angle [
37]. At this point, the soiling depth was
d1 = 97.8 mm, and the soiling width was
d2 = 68 mm.
The bionic soil-loosening shovel is made of steel, with a density of 7.85 g/cm3, a volume of 30.87 cm3, and a mass of 242.3 g. Due to the small volume and relatively small mass of bionic shovels, the soil disturbance is low.
Therefore, the structural size of the soil-loosening shovel wing was optimized to effectively reduce the resistance under the premise of increasing soil disturbance. In addition, a mechanical model was established to analyze the factors affecting the resistance, providing a theoretical basis for the subsequent discrete element simulation tests. The structure of the bionic soil-loosening shovel is shown in
Figure 3.
2.4. Establishment of Discrete Element Model of the Soil-Loosening Shovel, Carrots, and Soil Particles
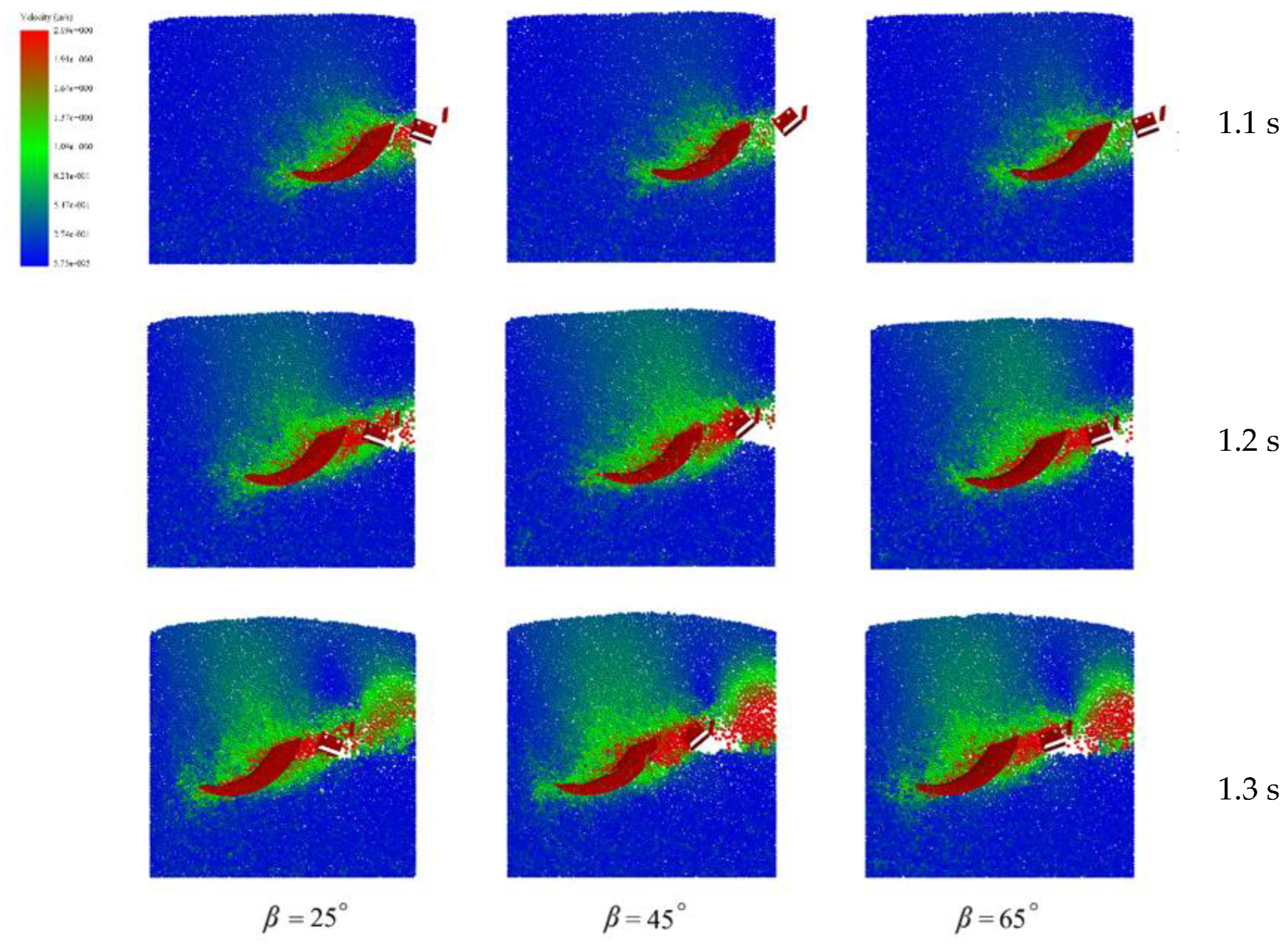
In this study, a multi-element coupling model was constructed by taking the 3D model of the soil-loosening shovel, the test field, and a carrot as carriers to analyze the performance rule of the soil-loosening shovel. In order to obtain the optimal structural parameters of the soil-loosening shovel wing, a virtual simulation test was carried out based on discrete element software with the opening angle (
α, the angle between the left and right wings of a loose shovel) and inclination angle (
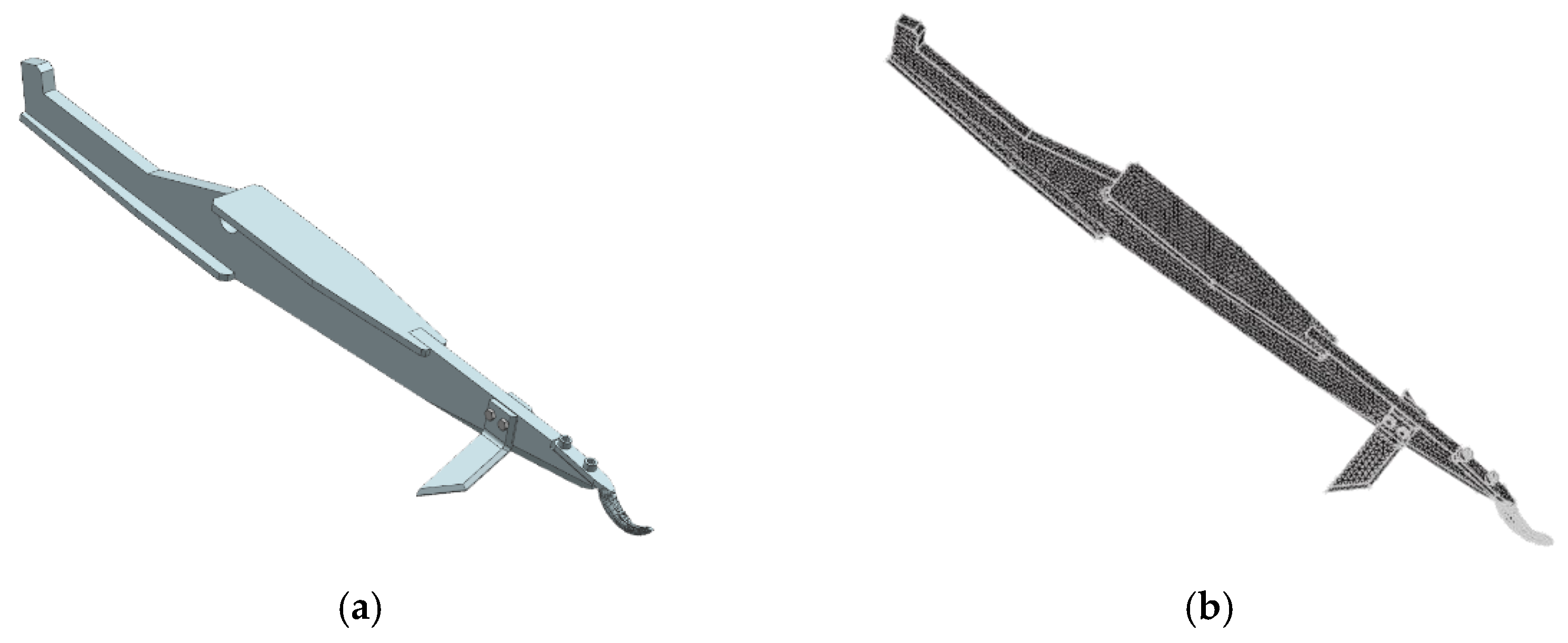
β, the angle between the wings of a loose shovel and the horizontal plane) of the soil-loosening shovel wing as the test factors; and the resistance, carrot-pulling force, and soil particle disturbance served as the test indexes. Solidworks was used to carry out solid proportional modeling of the soil-loosening shovel, and the model was imported into EDEM software. According to the operation requirements, the material of the soil-loosening shovel is 65 Mn steel. Its Poisson ratio and shear modulus were set in EDEM software. The carrot 3D model was imported into the DEM-simulated soil trough through Geometries. The virtual simulation model of the soil-loosening shovel is shown in
Figure 4, and the carrot is shown in
Figure 5.
In order to accurately simulate the contact between the carrot and soil and extract an accurate carrot model, the EinScan Pro 2x non-contact 3D scanner was used to scan the carrot, establish 3D carrot models, and import them into the EDEM simulated soil trench. The basic size of the soil trench (length × width × height) was set to 400 mm × 400 mm × 500 mm in the model. According to the early measurement of the tillage layer, the virtual soil trench was stratified, namely the tillage layer, plow bottom layer, and subsoil layer. The simulation model is shown in
Figure 6.
In order to accurately simulate the contact state of the soil-loosening shovel–soil–carrot, the bonding force of the soil particles is mainly set according to their internal cohesion characteristics. The complex bond and fracture relationships among the soil particles were simplified into the contact model between soil and soil as Hertz–Mindlin JKR, the contact model between soil and carrot as Hertz–Mindlin JKR, and the contact model between soil and bionic shovel as Hertz–Mindlin no slip. A virtual soil trench was established using EDEM software. The soil particle model was generated in a virtual particle factory according to the probability distribution percentage of the soil properties in each layer. A virtual plane with the same size as the upper surface of the virtual soil trench was established to make it move from top to bottom. The virtual plane dropped 1 mm at a rate of 20 mm/min to compact the soil [
38]. During the movement, the plane contacted the soil particles and compacted the virtual soil trench, so as to keep the simulation environment consistent with the actual soil.
2.5. Simulation Parameter Setting
The established 3D model of the soil-loosening shovel and carrot was imported into EDEM software, placing the 3D model in the specified position, using moving and rotating commands. The root was used to construct the soil-loosening shovel–soil–carrot coupling contact model through the EDEM preprocessing module. The specific parameters are shown in
Table 4 [
39,
40].
2.6. Evaluation Index of Virtual Simulation
Through the virtual simulation experiment, the combination of the optimal operating parameters and optimal structural parameters of the soil-loosening shovel wing was explored, providing the theoretical basis for the structural design of the soil-loosening shovel for a carrot combine harvester. In order to quantify the missing carrot rate and forward power consumption of the machine, the missing carrot rate was converted into a carrot-pulling force in the virtual simulation, and the forward power consumption was converted into resistance and output in real time through the EDEM postprocessing command.
- (1)
Resistance of the soil-loosening shovel
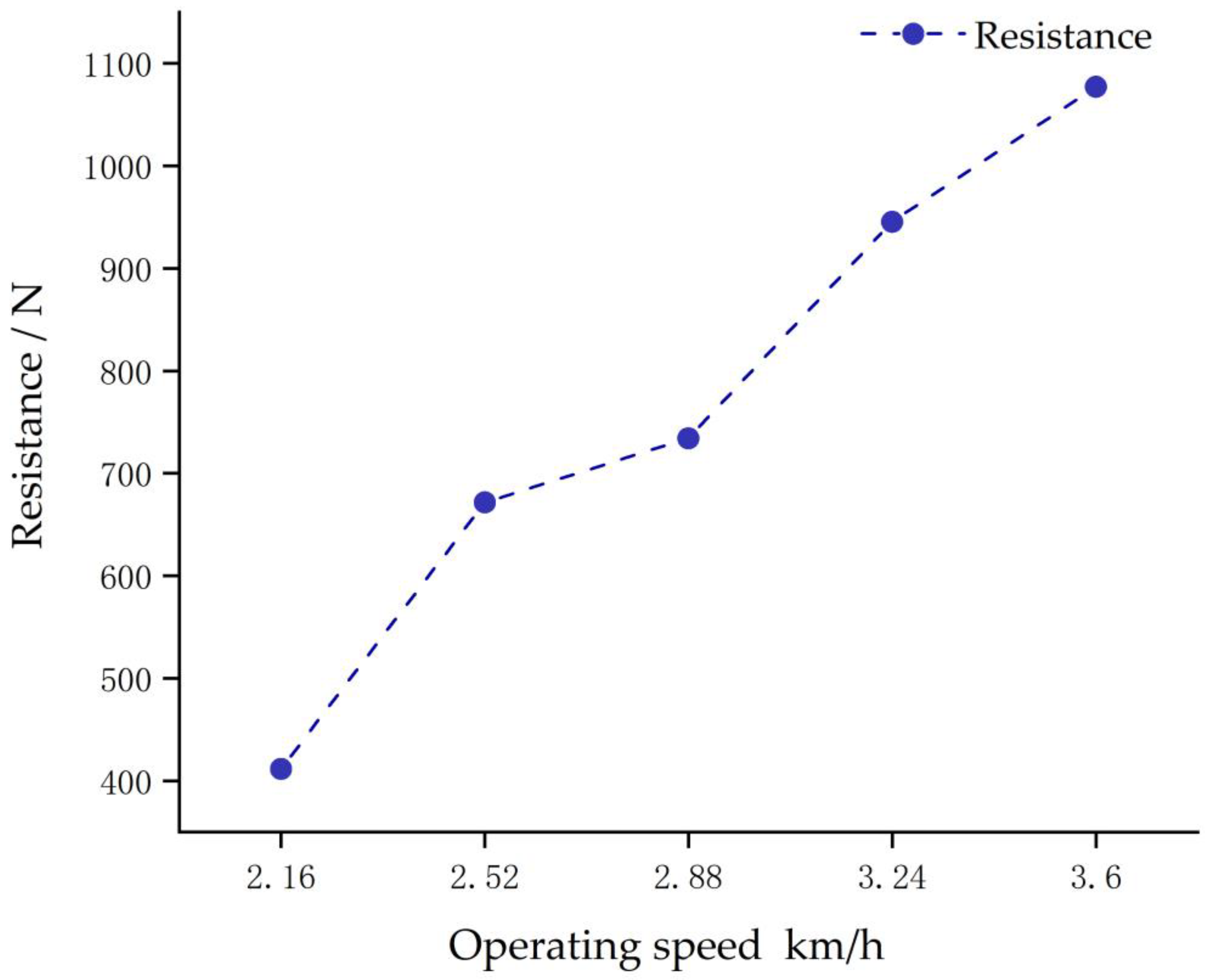
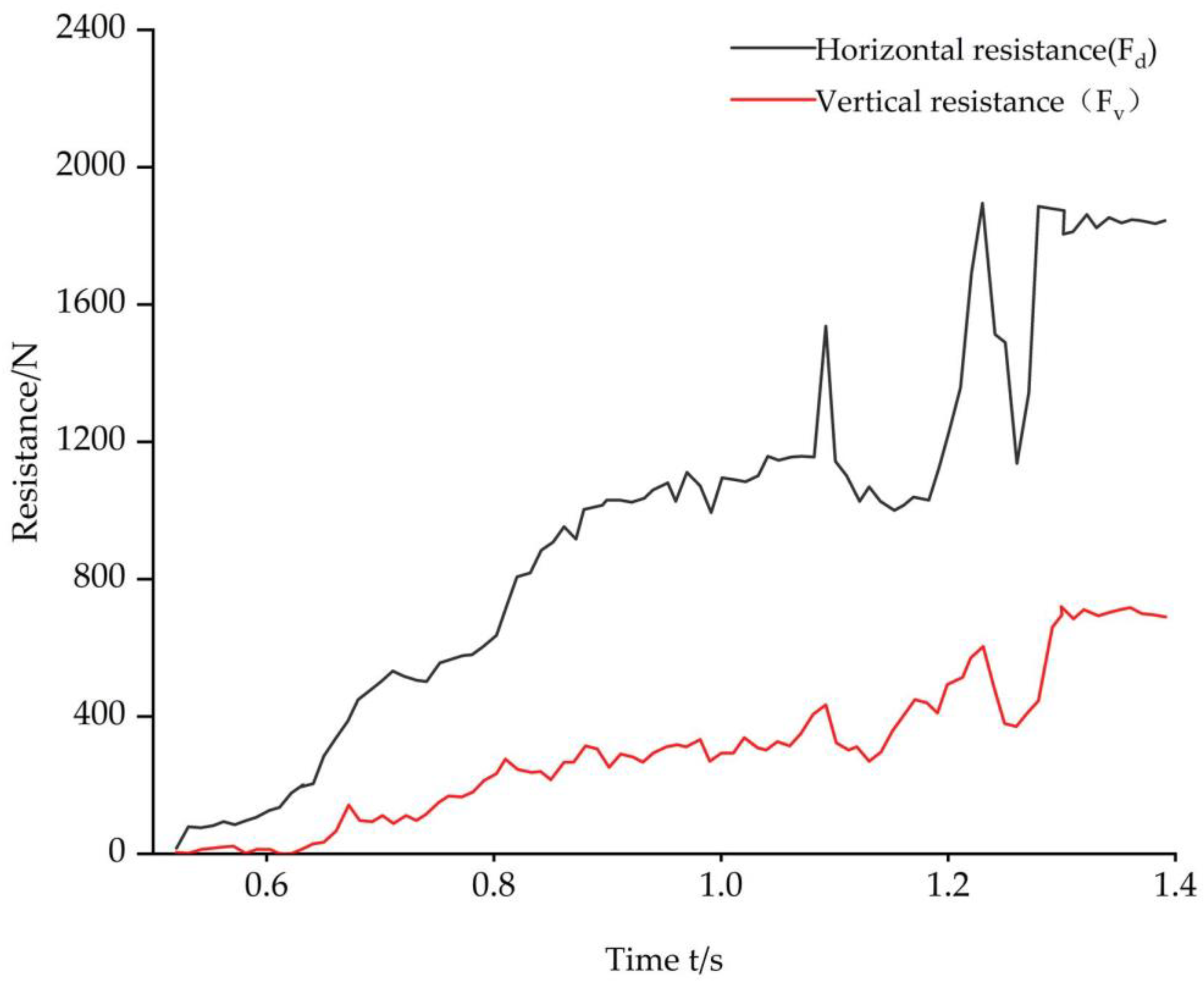
In this study, a DS2 digital force gauge (Dongguan Zhiqu Precision Instrument Co., LTD., Dongguan City, Guangdong Province, China) was used to measure the resistance of the bionic soil-loosening shovel at different speeds. At the same time, EDEM software was selected to determine the resistance of the bionic soil-loosening shovel at different times [
41]. The data were output through postprocessing, and the figure of the resistance variation in each stage was generated using Excel software.
- (2)
Carrot-pulling force
When pulling carrots, the bond between the carrots and soil is relatively strong, resulting in the fracture of the carrot tassels, leading to an increase in the missing carrot rate [
42]. Therefore, the carrot-pulling force is an important index to test the performance of soil-loosening shovels. When the shovel moves below the carrot, the soil bulkiness reaches its peak, corresponding to the minimum carrot-pulling force. At this time, the carrot begins to move upward. During the movement, soil particles adhere to the carrot surface due to the large bonding force between the carrot and soil.
- (3)
Soil particle disturbance coefficient
The soil disturbance coefficient is commonly used as the index to evaluate the soil particle disturbance effect [
43]. The accumulation contour of soil on the surface after soil loosening to the bottom of the trench after the actual deep loosening is taken as the ratio of the cross-sectional area of the soil-disturbed ridge and the cross-sectional area from the surface before soil loosening to the theoretical bottom of the trench, which is the soil disturbance coefficient, and its equation is as follows [
44,
45]:
where
y is the soil disturbance coefficient, %;
As is the cross-sectional area from the ground surface to the real bottom of the trench after subsoiling, mm
2; and
Aq is the cross-sectional area from the ground surface to the theoretical bottom of the trench before subsoiling, mm
2.
The larger the soil disturbance coefficient, the better the subsoiling effect, the greater the benefit to the pulling and harvesting of carrots, and the higher the quality of the harvested carrots.




 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}