2.1. Flow Force Analysis
The analysis of flow forces was performed on the proportional directional valve PRL2-06-32-0-24 from Argo Hytos (Vrchlabí, Czech republic). Valve size is 06 and nominal volumetric flow rate is
QN = 32 dm
3·min
−1 for nominal pressure drop
pN = 70 bar. It is a direct controlled, three-position, four-way spool valve. The valve spool is made in a sharp-edged design with zero spool lap in the middle position. The control part of the proportional directional valve consists of a linear motor. The armature of the linear motor is firmly connected to the valve spool. An inductive position sensor is placed between the linear motor and the valve spool. The inductive position sensor provides feedback from the spool position and ensures higher accuracy of the proportional directional valve. The desired position of the valve spool can be disturbed, for example, by the flow force [
16]. The desired position of the valve spool can be controlled by means of feedback from the position of the valve spool.
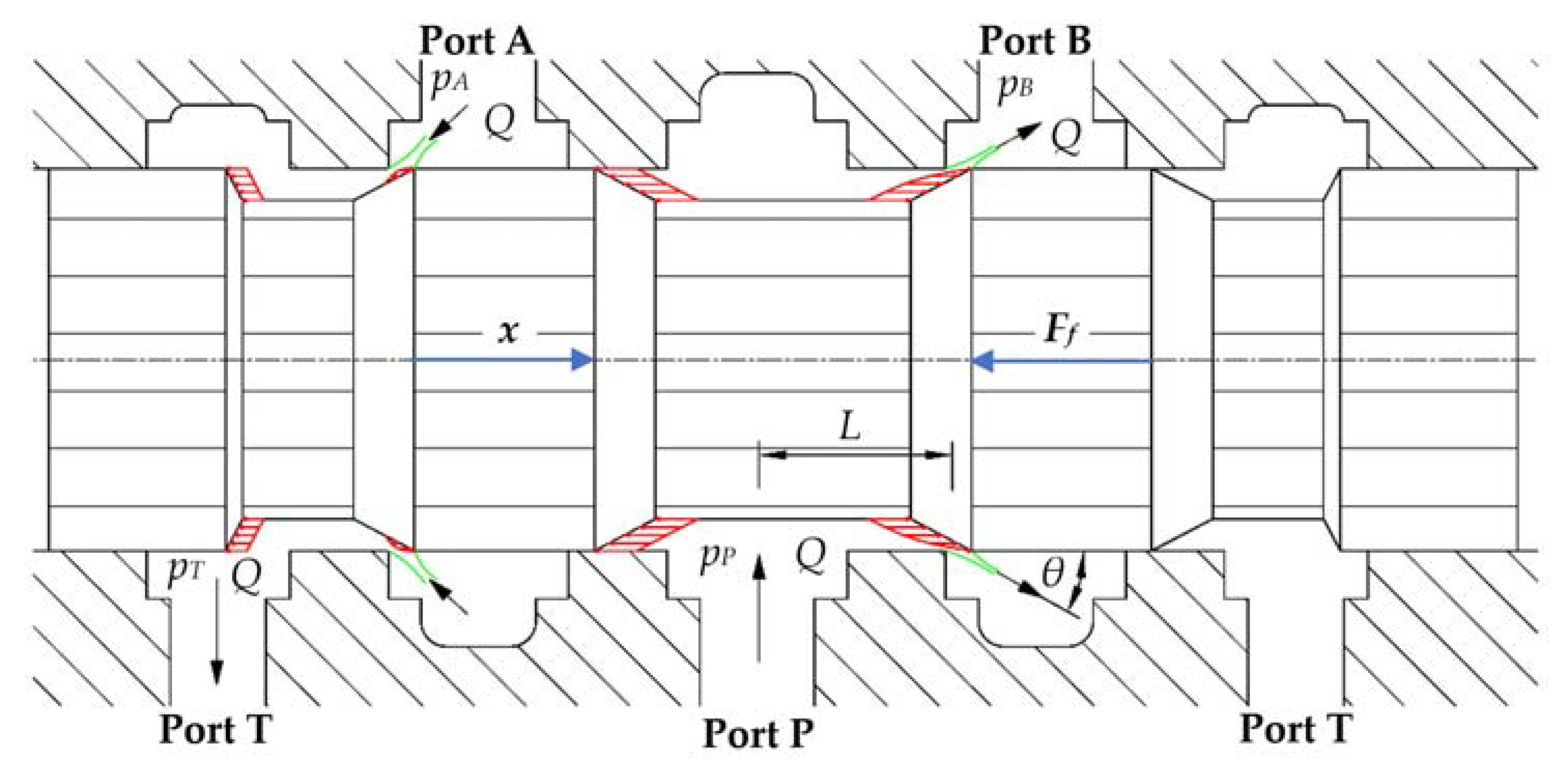
As an effect of the fluid flow through the directional valve, a flow force acts on the valve spool when the spool is deflected from its middle position. The flow force
Ff is defined by two components of this force. The steady-state flow force
Ffs is caused by a change in the momentum of the flowing fluid in the axis of the valve spool. This force can be expressed by the Equation (1) [
17,
18]. The steady-state flow force
Ffs always acts on the valve spool in the direction that closes the flow path of the directional valve.
where
is density of the fluid,
Sp is the flow area,
Q is volumetric flow rate and
is the angle of the fluid jet; see
Figure 1. The flow direction through the valve is shown by the black arrows. The blue arrows show the direction of the spool displacement and the flow force direction.
A transient flow force
Fft is generated when the fluid flow surrounding the valve spool in the valve chamber is accelerated. The magnitude of this force is defined by Newton’s second law, and, after modification, it can be expressed by Equation (2) [
17,
18]. This force can act in the direction that closes or in the direction that opens the flow path of the directional valve, depending on the sign
.
where
L is the axial distance between the inlet and outlet fluid flow; see
Figure 1.
Then, the magnitude of the flow force
Ff is determined by Equation (3) [
17]. The direction of flow forces, or the signs of individual forces, are determined for the case of the proportional directional valve setup; see
Figure 1. For the directional valve setup with the same spool displacement but opposite direction of fluid flow, the sign of the steady-state flow force remains the same and only the sign of the transient flow force changes. A change in the direction of the steady-state flow force occurs if the valve spool is moved in the opposite direction [
17].
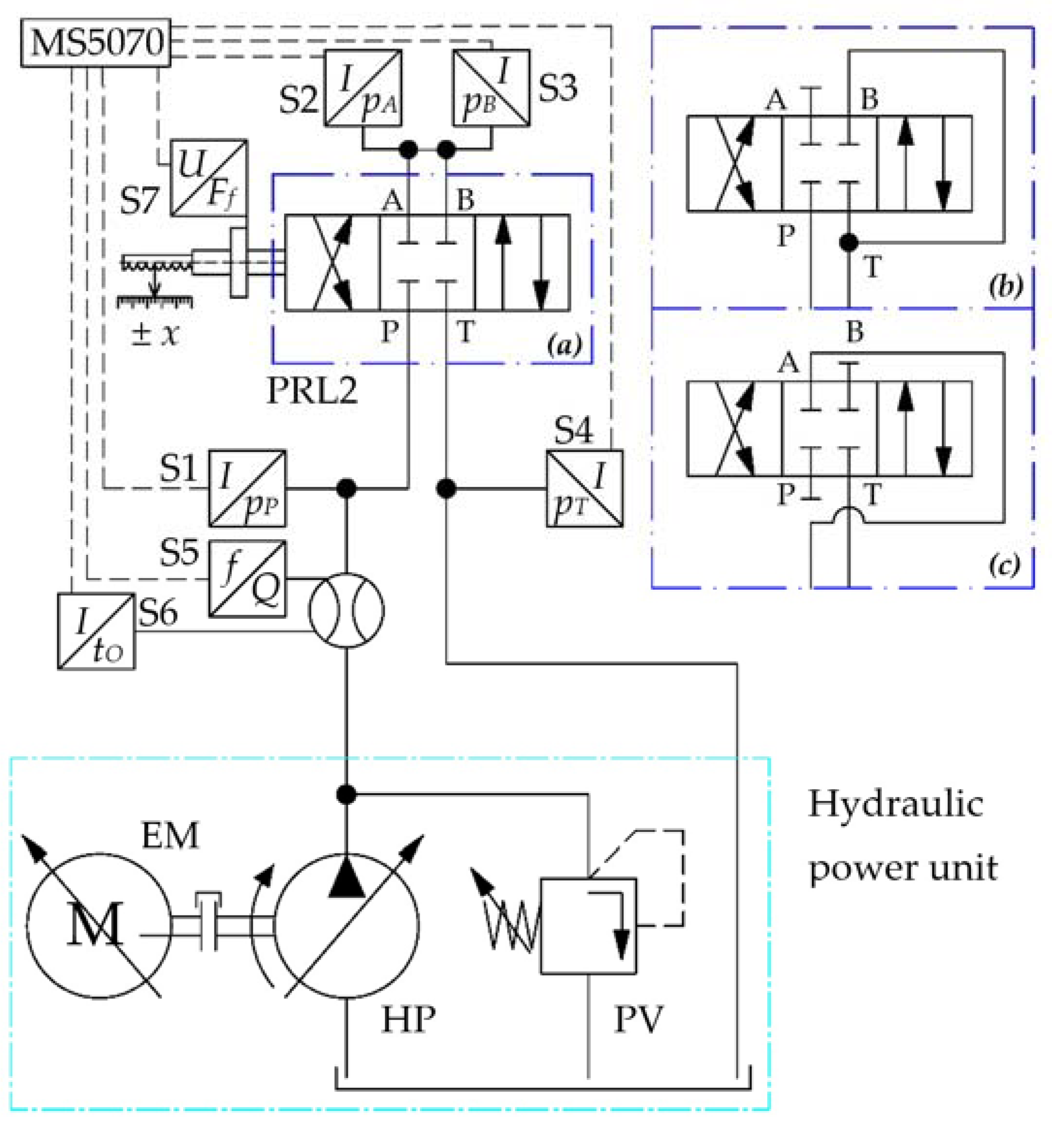
2.2. Experimental Test Stand
A hydraulic system was designed and built to measure the flow force. A simplified hydraulic scheme of the experimental system with different system variations is shown in
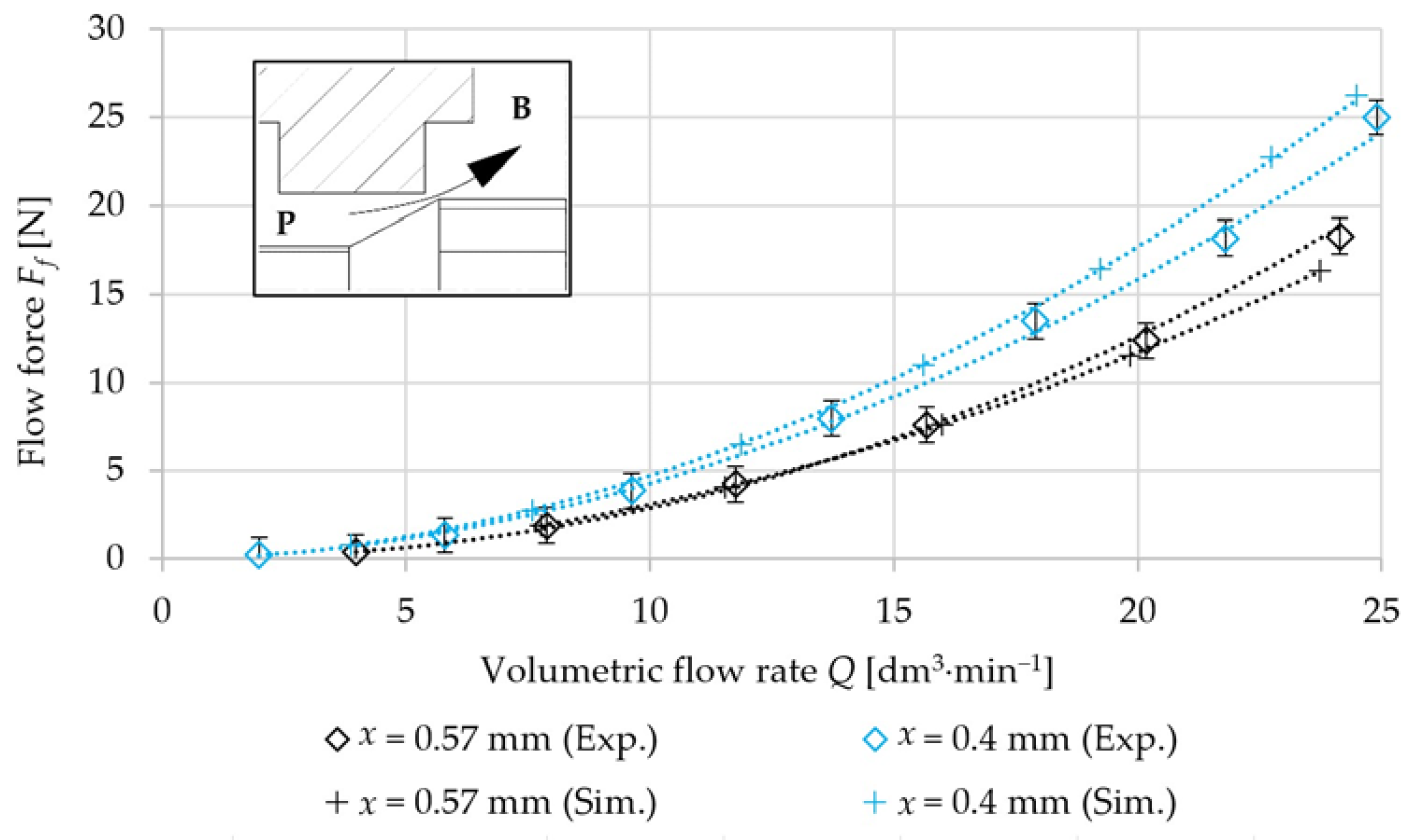
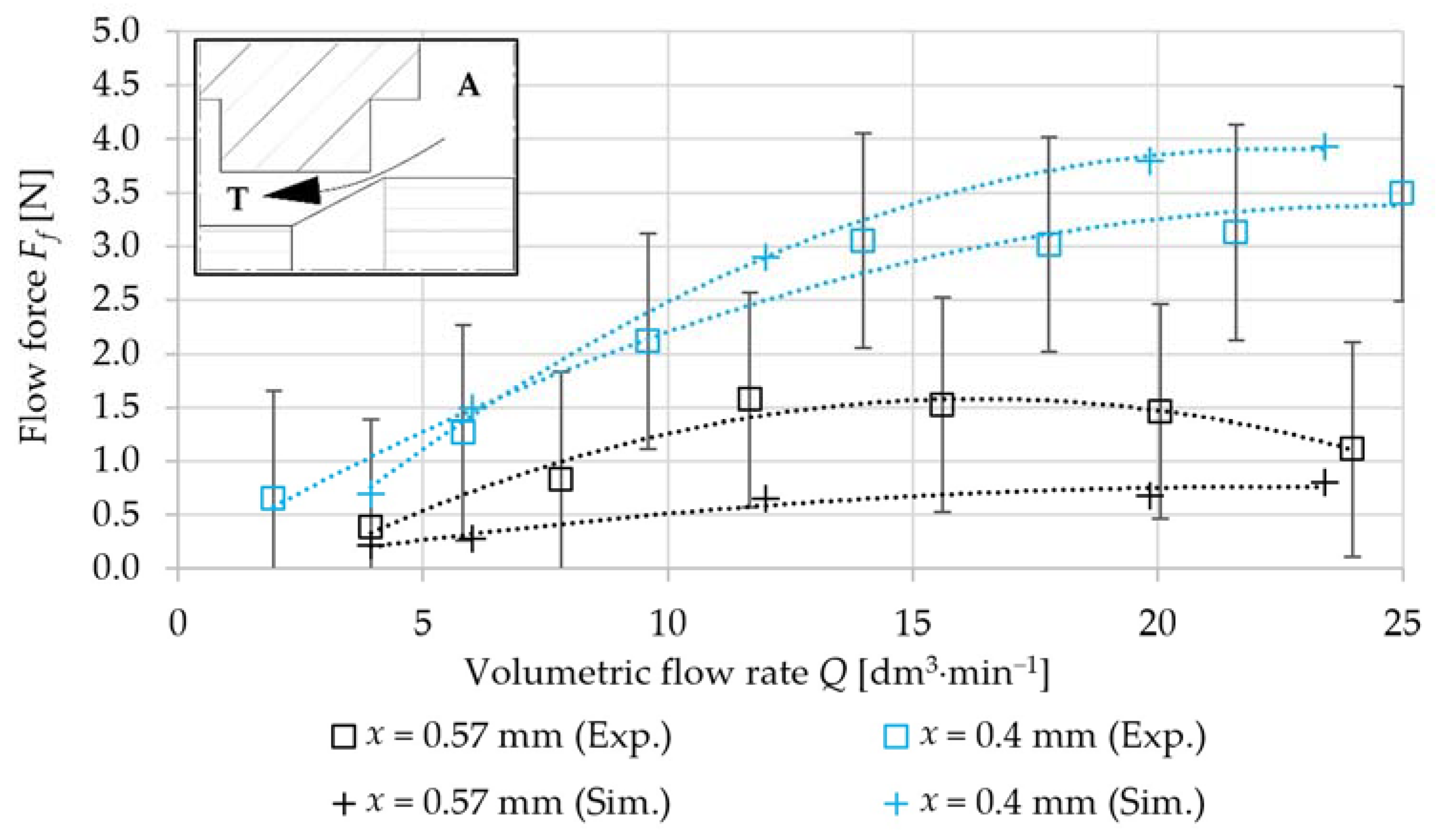
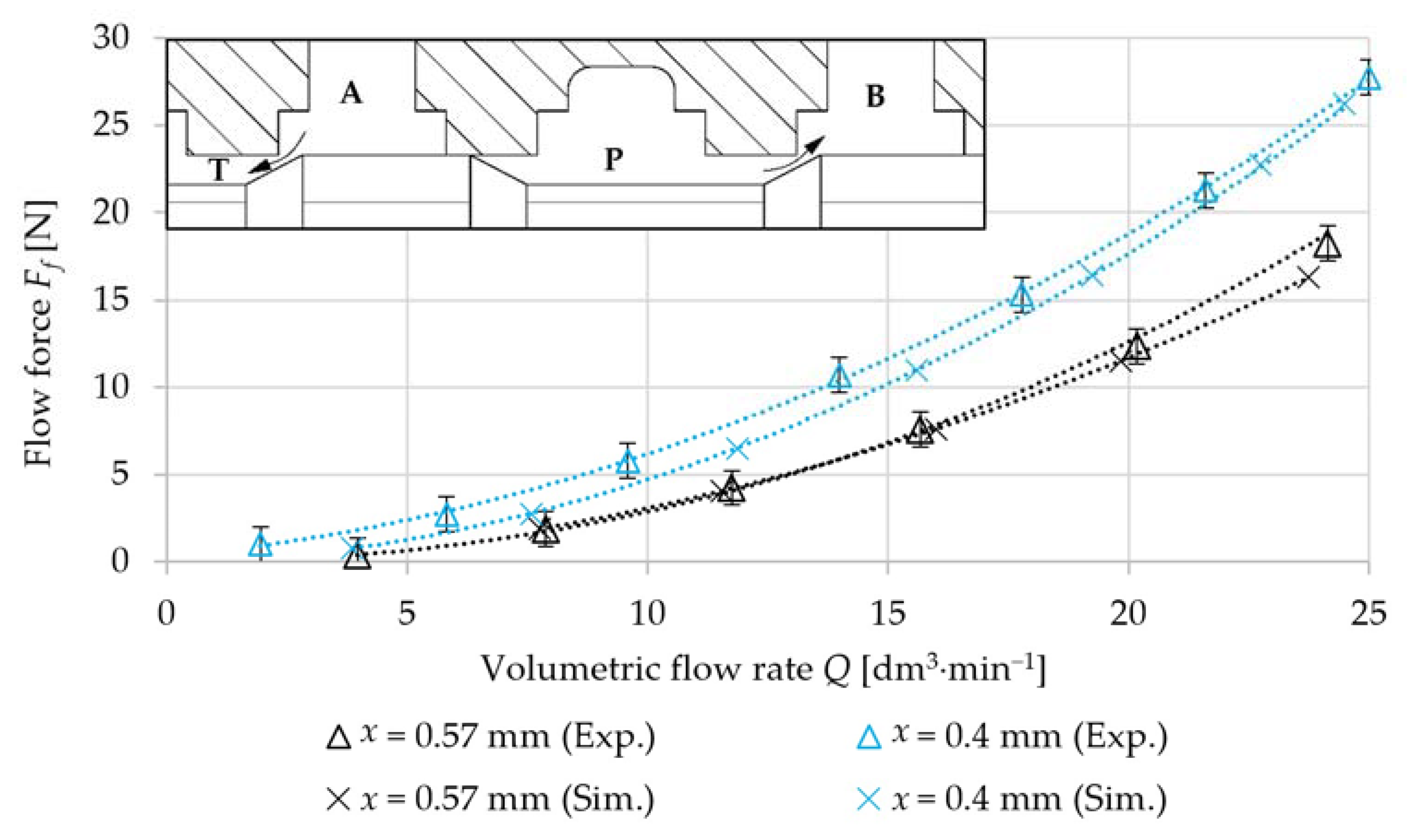
Figure 2. The standard directional valve connection shown in
Figure 2a was used to measure the flow force
Ff when the fluid passed through the flow channels PB and AT simultaneously. The connection scheme of the directional valve shown in
Figure 2b or
Figure 2c was used to measure the flow force
Ff when the fluid passed through each flow path separately (PB only or AT only). The source of the pressure energy was a hydraulic power unit that worked as a constant flow source. Pressure sensors S1, S2, S3 and S4 were connected in the system to measure the pressures
p in individual ports of the proportional directional valve. The volumetric flow rate
Q was measured by flow meter S5 in the circuit. The temperature of the oil
tO was measured by a temperature sensor S6, which was located in the flow meter. The flow force was measured by the S7 force sensor. The measuring instrument MS5070 from Hydrotechnik (Limburg an der Lahn, Germany) was used to record individual measurements. The measuring ranges and accuracy of each sensor are shown in
Table 1. Hydraulic oil HV46 was used in the experiment. At the oil temperature
tO = 40 °C, the density of the oil was 852 kg·m
−3 and the dynamic viscosity is 0.03859 Pa·s.
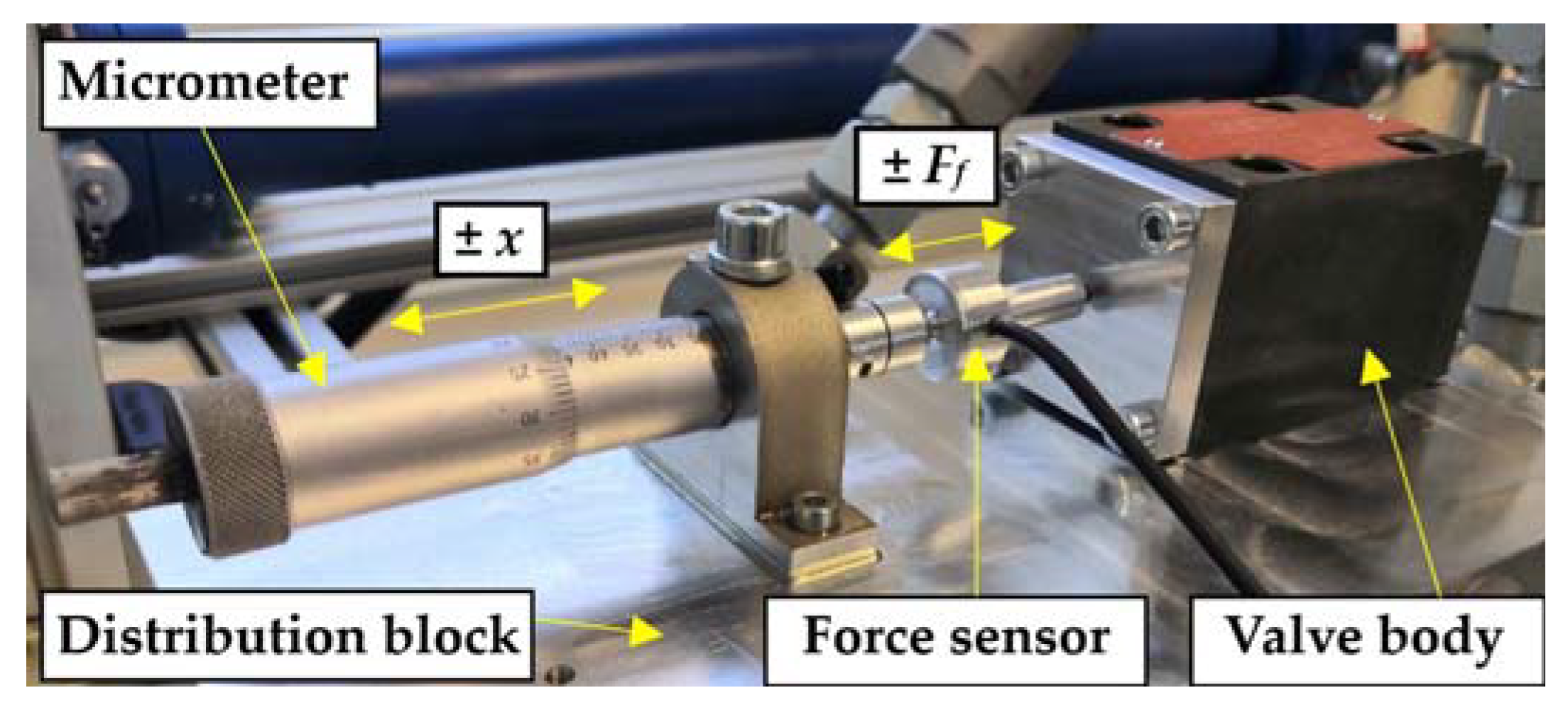
To measure the flow force, modifications were made to the proportional directional valve. The proportional directional valve was disassembled and only the hydraulic part of the valve, consisting of the cast iron body and the valve spool, was used for the measurement. After disassembling the directional valve, it was possible to place the force sensor on the spool axis. The force sensor was supported on the opposite side by a micrometer. The micrometer holder was attached to the distribution block. The force sensor S7 was placed between the moving end of the micrometer and the valve spool. The micrometer holder was designed to preserve the coaxiality of the micrometer, force sensor and valve spool. Thereafter, only the force due to the flow of the fluid acted on the force sensor. A micrometer was used to set the desired spool position. The relative position of the spool was determined by the position of a digital deviation meter in relation to a reference point. The digital deviation meter was placed on the front side of the spool. The digital deviation meter was used to check the deflection of the spool from the desired position. The reference point was the middle position of the valve spool. Pressure symmetry in the valve chambers with blocked ports A and B was used to determine the middle position of the valve spool. The micrometer was equipped with a locking screw that ensured a fixed position of the spool in the directional valve. The control part side of the valve body was fitted with an aluminium cover to minimise fluid leakage after the control part of the proportional directional valve was removed. The picture of the experimental equipment for flow force measurement with a description of the individual parts is shown in
Figure 3.
Flow Force Measurement
The flow force
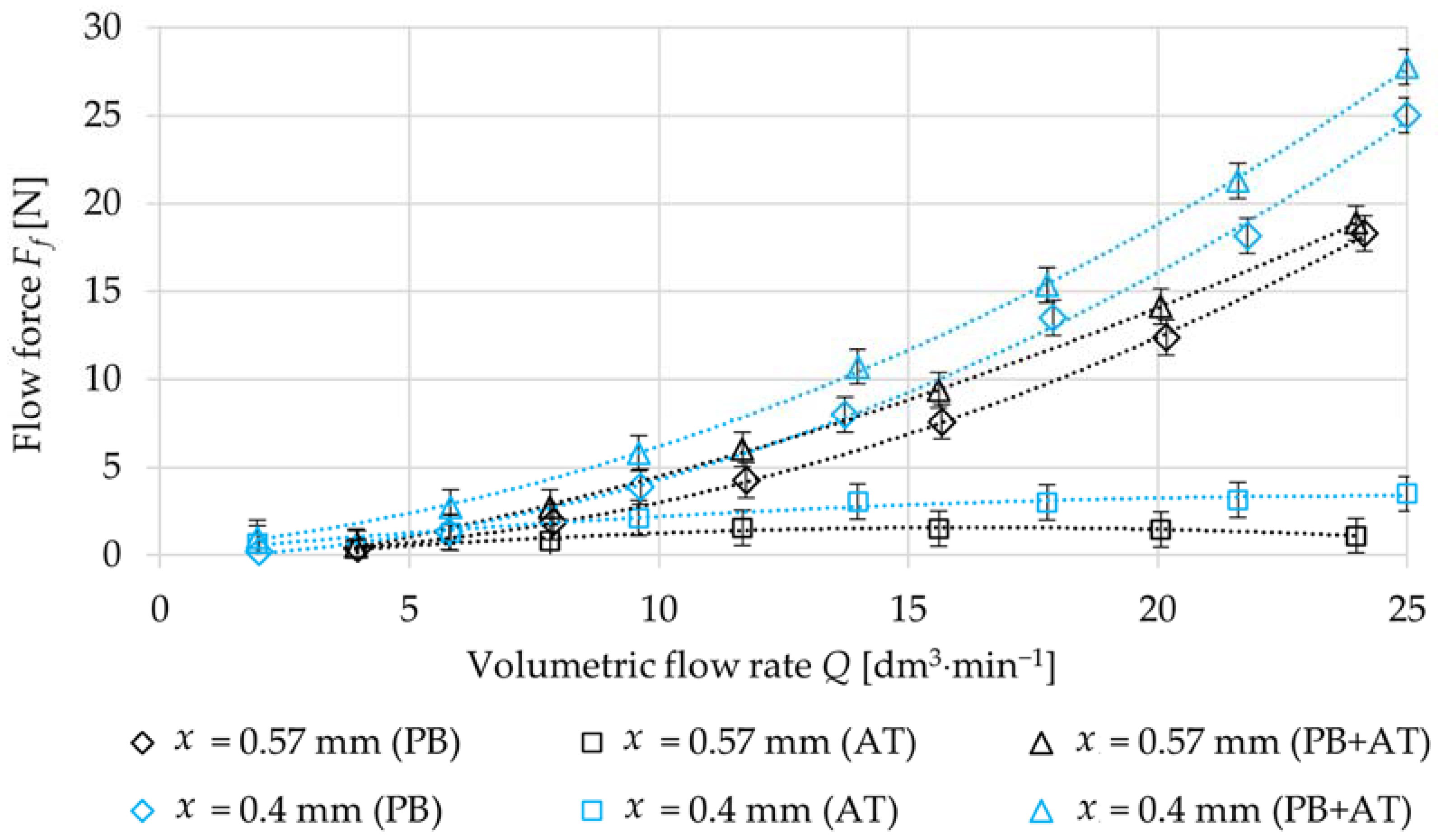
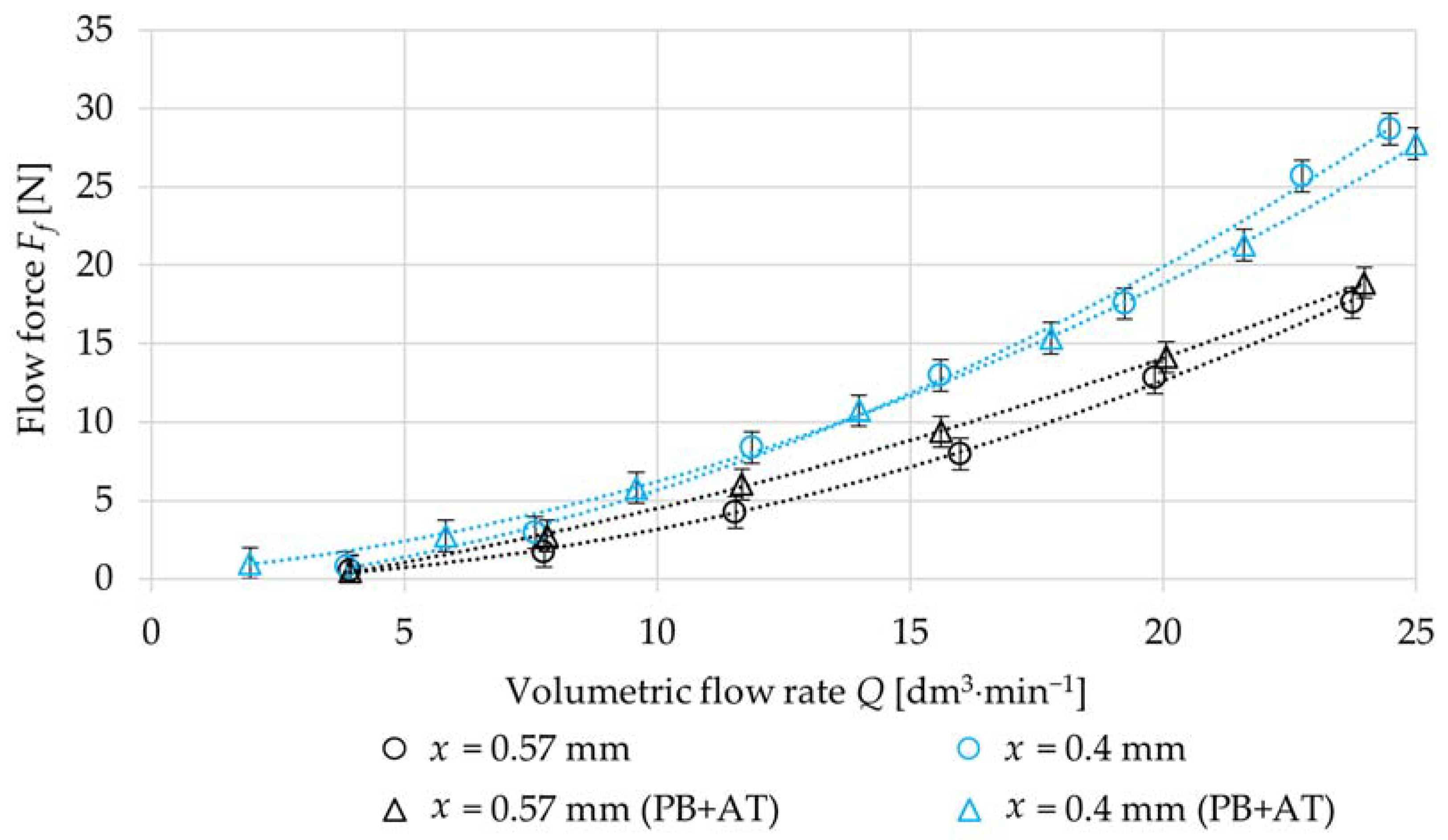
Ff, acting on the valve spool, was measured for the positive direction of the spool displacement, resp. of the oil flow through flow paths PB and AT. Firstly, measurements were performed to determine the flow force
Ff that acts on the valve spool when oil passes through flow paths PB and AT separately. During this measurement, the hydraulic system was adjusted so that the oil always flows only through the given flow path; see
Figure 2b,c. Subsequently, measurements were performed to determine the flow force
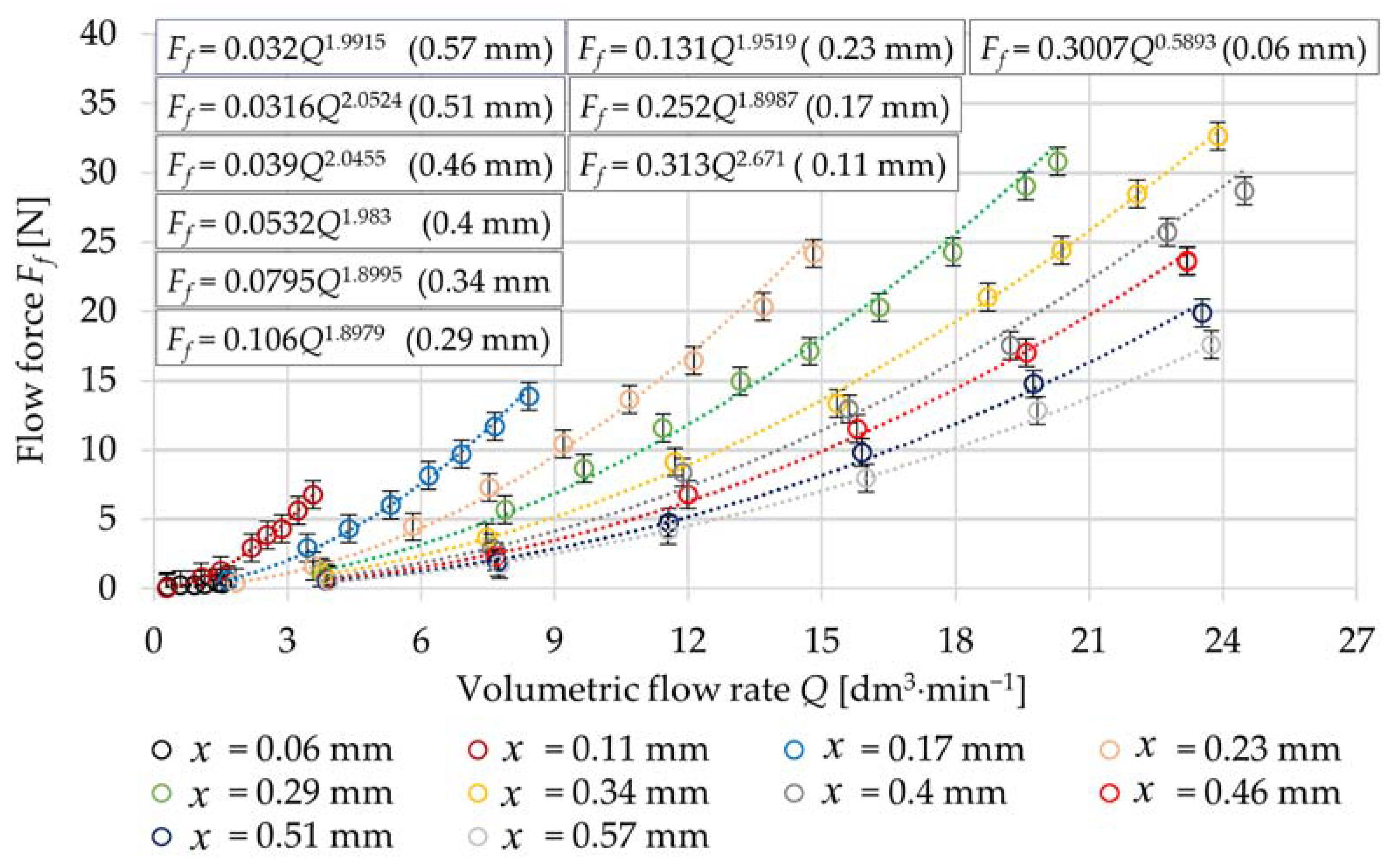
Ff that acts on the valve spool when oil passes through flow paths PB and AT simultaneously. The measurements were performed sequentially for several spool displacement
x over the entire stroke range for flow paths PB and AT, resp.
x = (0 ÷ 0.57) mm. The micrometer scale was used to set the desired position of the spool. However, it was necessary to establish a reference point. The middle position of the valve spool was chosen as a reference point. The symmetry of
pA and
pB pressures in valve chambers in blocked ports A and B was used to determine the middle position of the valve spool [
7]. The digital deviation meter was used to verify the correct spool position. The measurement of the flow force was performed when the spool position was set and verified. The system pressure was set to
pPV = 20 MPa. The volumetric flow rate
Q in the hydraulic system was gradually increased by the variable displacement pump HP. The steady-state values of the pressures in individual ports of the valve, volumetric flow rate
Q and flow force
Ff were recorded using the MS5070 measuring instrument for each change of volumetric flow rate
Q. The oil temperature was maintained at
tO = (40 ± 1) °C during the entire measurement.
2.3. Numerical Simulation
Numerical simulations of the flow in the PRL2-06-32 proportional directional valve through P-B and A-T flow paths were performed in Fluent 2022 R2. The flow force, acting on the valve spool, was then evaluated for selected spool displacements from results of the numerical simulation.
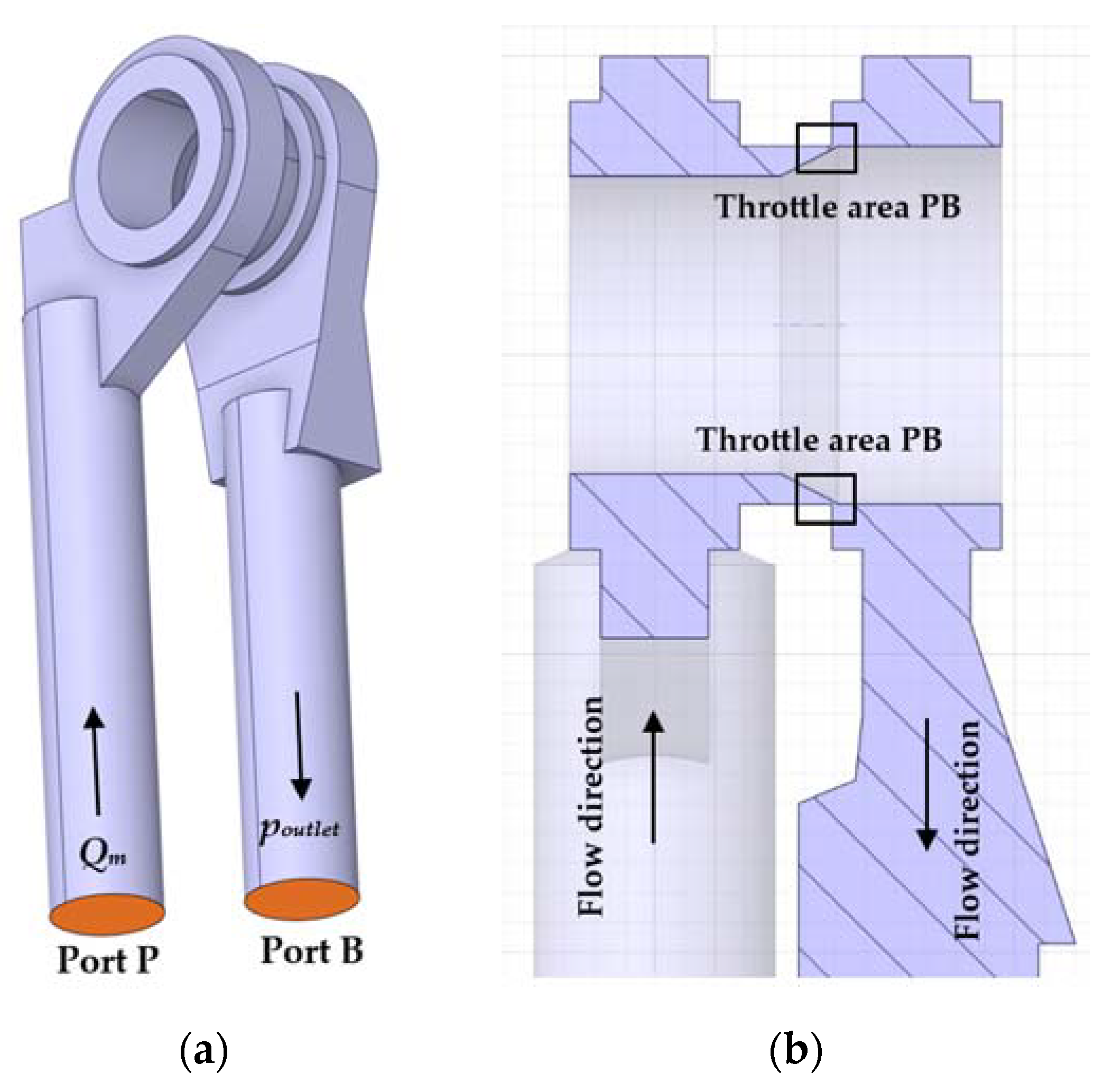
The 3D model of the investigated directional valve was used to create the flow geometry. Then, the created directional valve model was modified and simplified in SpaceClaim. The valve spool was set to the position corresponding to the required spool displacement, resp. of flow cross-section area. Simplification of the model was performed with respect to the number of cells and the quality of the computational mesh so that the flow path area was not affected, e.g., removal of technological curves, chamfers, etc. Fluid leakage due to radial clearance between the spool and the sleeve was neglected in the model. An inverse geometry of the flow path in the directional valve was created from the modified model. The inverse geometry was extended with input and output connection channels to match as closely as possible the real measurement geometry. Boundary conditions were defined on the inlet and outlet channels. The inlet boundary condition was defined by the mass flow rate
Qm. The outlet boundary condition was defined by the outlet pressure
poutlet. An example of the resulting PB flow path geometry with marked boundary conditions is shown in
Figure 4a.
Figure 4b shows an example of a longitudinal section of the flow path geometry with the throttle area which is marked by a box. The geometry of the flow path was created for two spool displacements
x = (0.57; 0.4) mm.
The computational mesh for each geometry was created in Fluent Meshing; see
Figure 5. The computational mesh was created by polyhedral elements. The polyhedral mesh was used for the numerical simulation because of the smaller number of elements than, for example, a tetrahedral mesh. The global size of the computational mesh elements was set to 0.75 mm. The growth rate of the mesh was defined as 1.2. As part of the creation of the computational mesh, the total volume was divided into specific sub-volumes. The sub-volumes were located in the area of the throttle cross-section and the downstream of the throttle cross-section. These sub-volumes were created due to the possibility of refining the computational mesh in different flow regions. Different element sizes were set for each specific sub-volume. The size of the elements for the sub-volume in the throttle area was set with respect to the width of the throttle section. In the downstream area of the throttle section, the mesh was refined due to the possibility of fluid swirl in this area. A boundary layer was created near the walls.
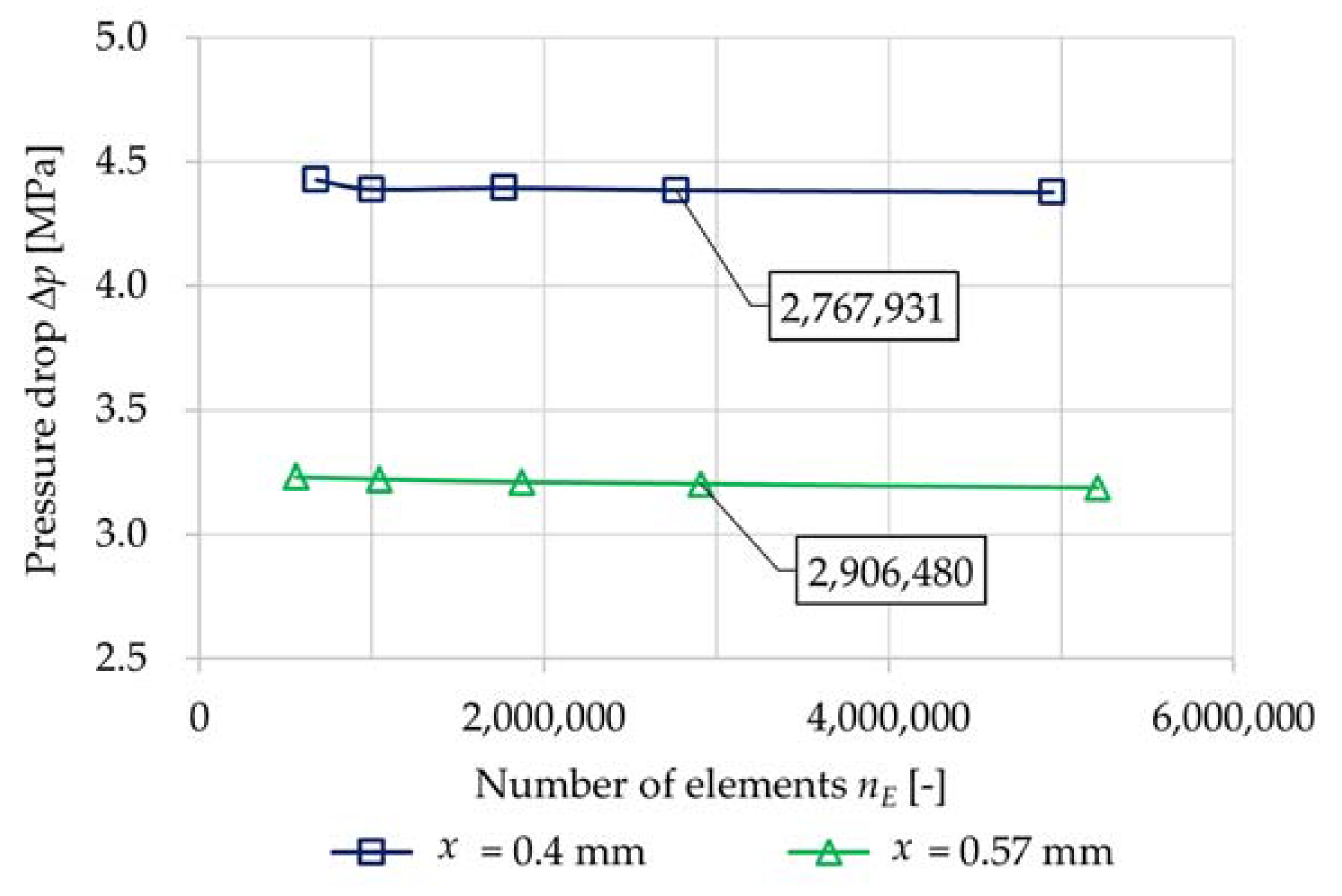
The basic setup of the computational mesh was then gradually adjusted by reducing the size of elements in specific sub-volumes, resp., by refining the coarse mesh in critical areas. The pressure drop Δ
p across the throttle cross-section and the flow velocity
v in the throttle cross-section was monitored for each modification of the computational mesh. The refinement of the computational mesh and the evaluation of the monitored variables was always performed at the maximum mass flow rate for the given geometry. The resulting computational mesh was chosen with respect to the steady state of the monitored variables and the number of elements, which significantly affected the time consumption of the numerical simulation. The results of the convergence test are shown in
Figure 6 and
Figure 7. The quality of computational meshes was checked in relation to cell deformation using the Skewness parameter. The quality of computational meshes of each geometry was satisfactory.
In fluid mechanics, two types of flow can be characterized, laminar and turbulent flow. A characteristic feature of turbulent flow is the random fluctuations of the hydraulic parameters of the flow field, which are a function of both space and time. The boundary between laminar and turbulent flow is defined by the Reynolds number (4) and depends on the nature of the problem to be solved and the specific conditions.
where
v is the flow velocity in the throttle cross-section area,
dh is the hydraulic diameter corresponding to the throttle cross-section,
ρ is the oil density and
η is the dynamic viscosity.
In terms of the magnitude of the Reynolds number, it has been determined that turbulent flow occurs in the flow paths. Therefore, the
k-
ε RANS (RNG) model was used for the numerical simulations. This is a turbulence model constructed from two differential equations. The first equation is used to calculate the turbulent kinetic energy
k (5), and the second equation is used to determine the turbulent kinetic energy dissipation rate
ε (6) [
19].
The RNG
k-
ε-based turbulence model is derived from the instantaneous Navier–Stokes equations, using a mathematical technique called renormalization group (RNG) method. The turbulent kinetic energy
k and the turbulent kinetic energy dissipation rate
ε appear in the following transport equations [
19,
20,
21].
where
Gk represents the generation of turbulent kinetic energy due to the mean velocity gradients,
Gb is the generation of turbulent kinetic energy due to buoyancy,
Ym represents the contribution of the fluctuating dilatation in compressible turbulence to the overall dissipation rate. The quantities
αk and
αε are the inverse effective Prandtl numbers for
k and
ε,
Sk and
Sε are user-defined source terms and
C1ε,
C2ε and C
3ε are constant.
The steady-state solver was used for the numerical solution. To ensure greater stability and robustness of the numerical calculation, a pressure-based coupled algorithm was defined to solve the interdependence between flow velocity and pressure. Second order interpolation schemes were defined to ensure greater accuracy of the numerical solution when solving the spatial discretization. The values of boundary conditions for each spool displacement corresponded to the experiment; see
Table 2. The physical properties of the oil were set for the temperature
tO = 40 °C, at which the experiment was performed.
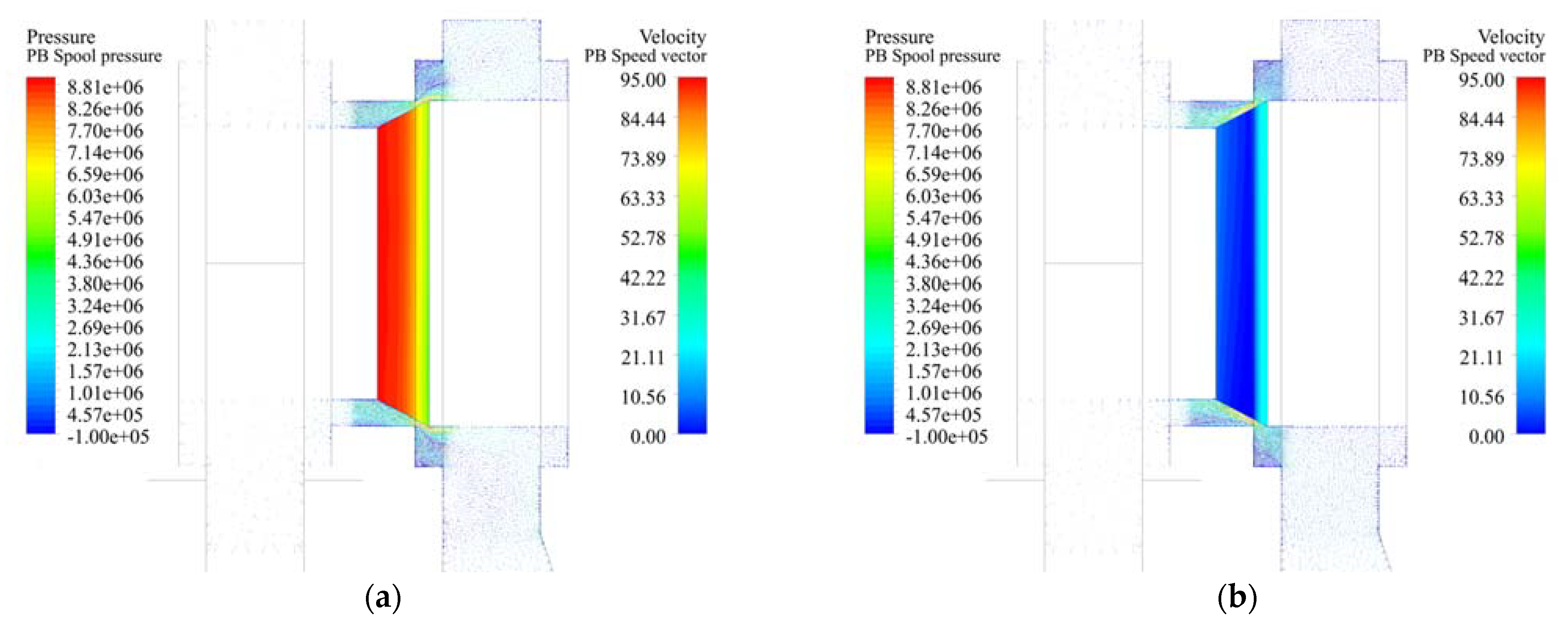
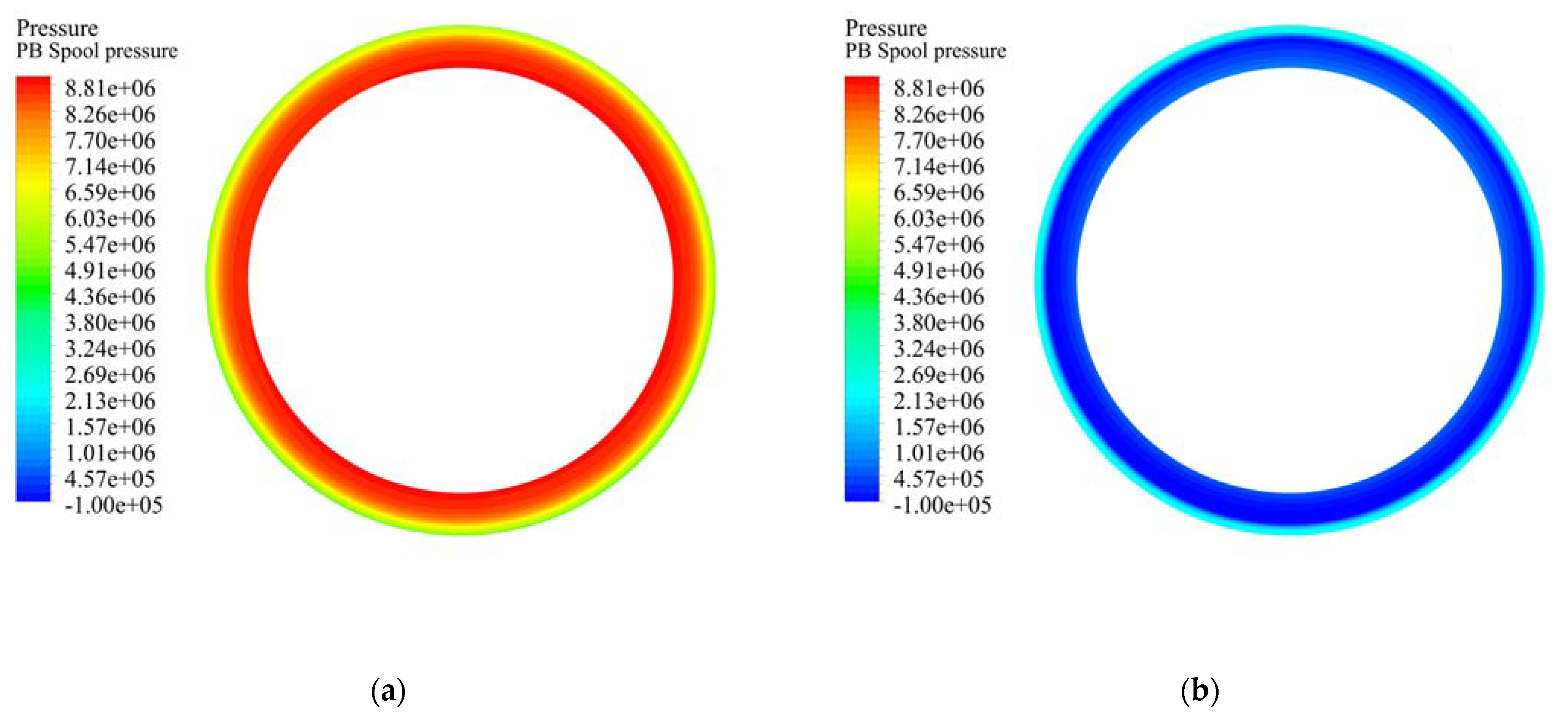
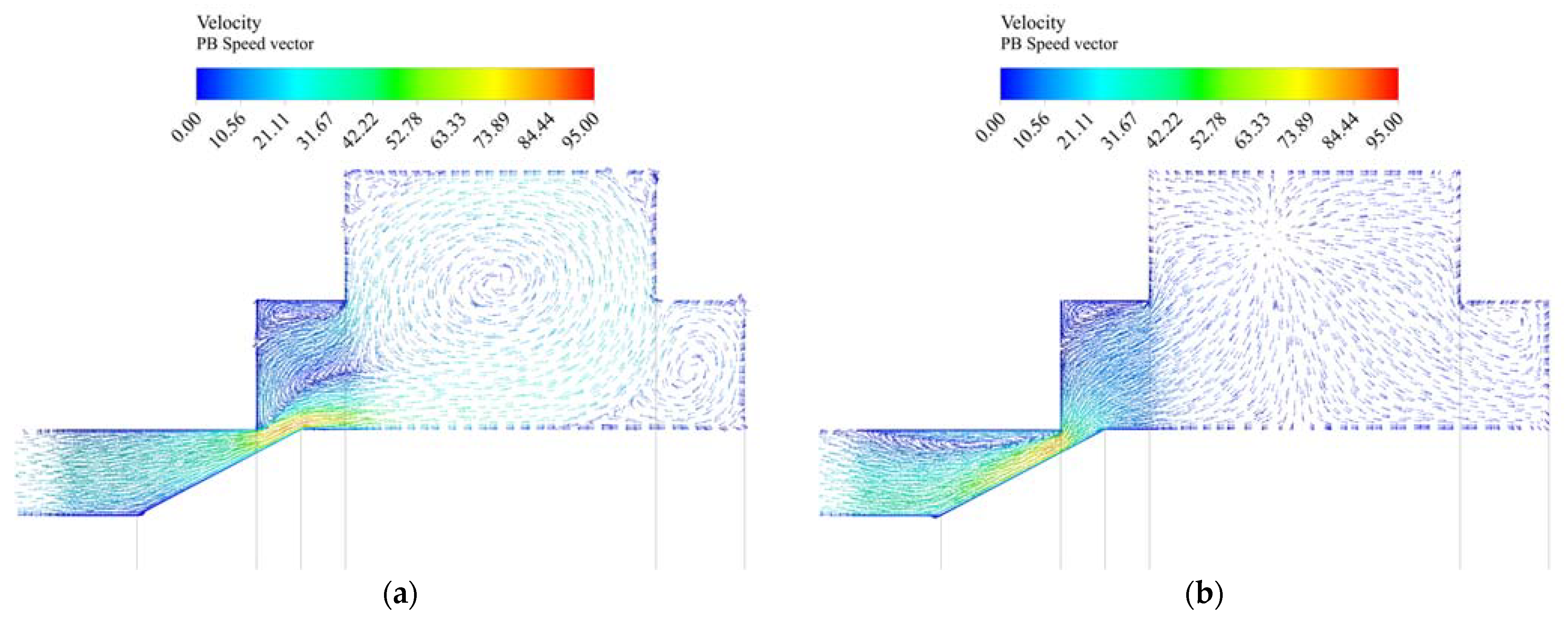
The arising forces from the oil flow, acting on the chamfered surface of the valve spool, were determined from numerical simulations. The resulting flow forces were evaluated as the difference between the axial force acting on the chamfered surface of the spool in the direction of oil flow and the pressure force acting on the opposite chamfered surface. The force from the oil pressure was not affected by the flow. The chamfered area, which was unaffected by flow, was not included to reach simplification of the model geometry and computational mesh. The oil pressure force, acting on this surface, was then determined in the horizontal direction. The area for the calculation was defined as the projection of the chamfered surface into the vertical plane and the static pressure near the chamfered surface was determined from the numerical simulation.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}