
Stability Analysis and Navigational Techniques of Wheeled Mobile Robot: A Review

 , , , ,
, , , ,
Abstract
:1. Introduction
1.1. Stability Analysis of Wheeled Robot
- Kinematic and dynamic models: Stability analysis approaches use mathematical models to describe the robot’s dynamics and kinematics. The kinematic model is solely based on the robot’s motion, disregarding any stresses or torques that may affect the robot’s mobility. Contrarily, the dynamic model considers the pressures and torques that affect the robot’s motion.
- The stability analysis criteria are used to evaluate the stability of the robot. The most common stability analysis criteria used in WMRs are Lyapunov stability, passivity-based stability, and control Lyapunov functions (CLFs). Lyapunov stability analysis uses Lyapunov functions to determine the stability of the robot’s motion. Passivity-based stability analysis is based on the concept of passivity and uses energy functions to evaluate the stability of the robot. CLFs are used to design control laws that ensure the stability of the robot.
- Trajectory tracking: To assess the robot’s ability to follow a desired trajectory, stability analysis techniques are also applied. The discrepancy between the robot’s actual trajectory and its anticipated trajectory is known as the trajectory tracking error. The robot’s stability is measured by its capacity to achieve a trajectory tracking error of zero.
- Control design: Stability analysis methods are used to design control laws that ensure the stability of the robot. The control laws are designed based on the dynamics of the robot and the stability analysis criteria. The control laws are then implemented in the robot’s control system to ensure stable motion.
- Simultaneous localization and mapping (SLAM): Popular mapping and localization methods include SLAM. It entails mapping the surroundings and determining the robot’s position inside that map at the same time. When an existing map of the environment is not accessible, SLAM is very helpful.
- Monte Carlo localization (MCL): For determining the robot’s location inside a known map, MCL is a particular kind of particle filter. It functions by converting the location of the robot into a probability distribution and updating it in response to sensor readings.
- Reactive navigation: Reactive navigation techniques focus on the robot’s immediate environment and are designed to quickly and efficiently respond to changing situations. Examples of reactive techniques include potential fields and behavior-based control.
- Model predictive control (MPC): In order to forecast the robot’s future behavior and optimize control inputs, the MPC control approach employs a mathematical model of the robot’s dynamics. Planning a course and avoiding obstacles are both possible with MPC.
- Reinforcement learning (RL): RL is a machine learning technique that enables the robot to learn how to navigate through trial and error. The robot receives rewards or punishments based on its actions and adjusts its behavior to maximize the rewards.
1.2. Major Objective
- Provide an extensive review that focus on navigational complexities in the context of wheeled mobile robots (WMRs).
- Trace the historical and contemporary developments in WMR research, including the establishment of kinetic stability and the construction of intelligent WMR controllers.
- Examine the importance of stability and intelligent capabilities in WMR controllers and their impact on WMR performance.
- Present a comprehensive overview of stability analysis techniques tailored for WMRs, including discussions on Lyapunov stability analysis and passivation-based control.
- Explore various navigation techniques for WMRs, covering aspects such as path planning, obstacle avoidance, localization and mapping, and trajectory tracking in both indoor and outdoor settings.
1.3. Paper Organization
2. Literature Review
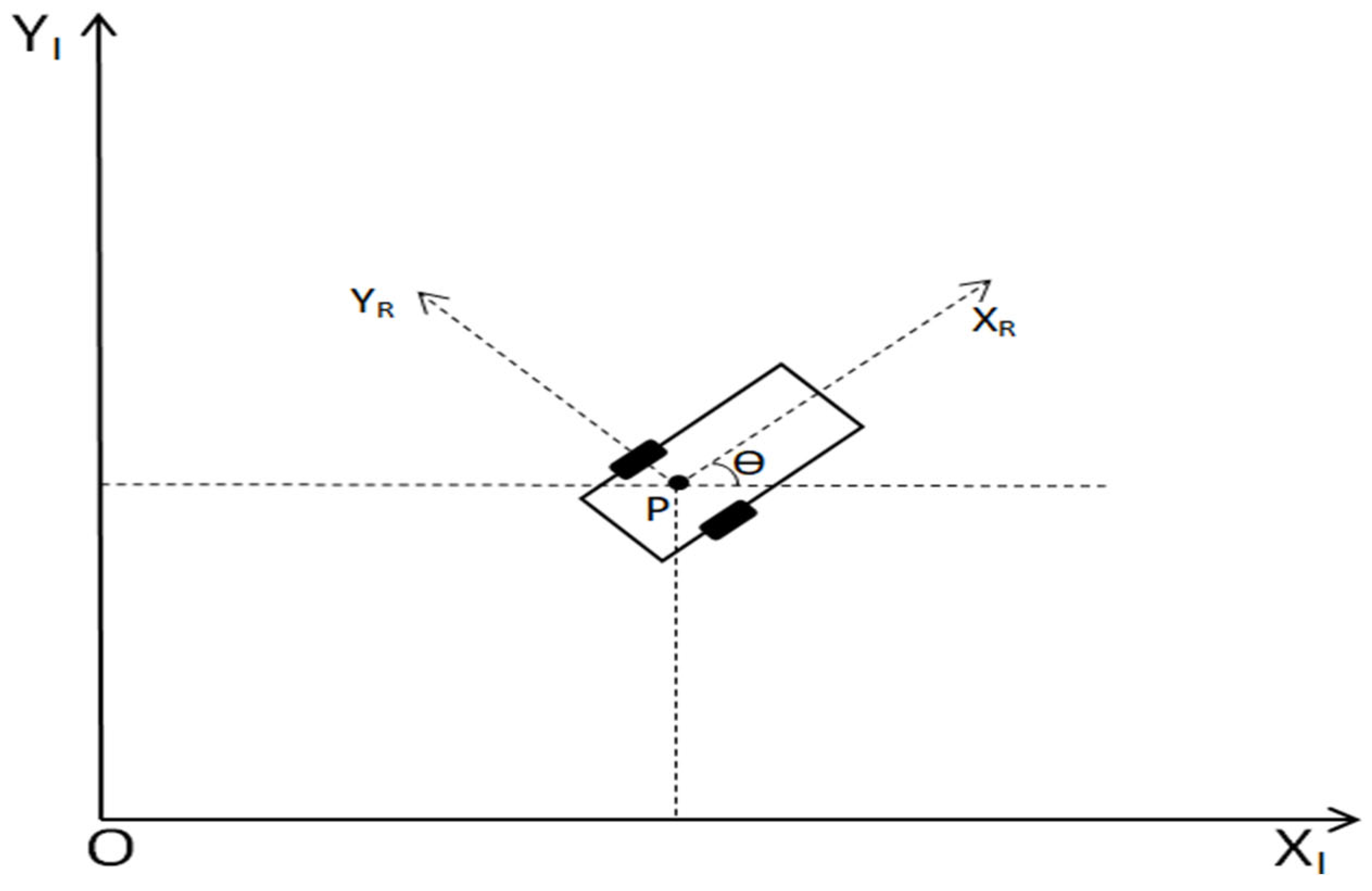
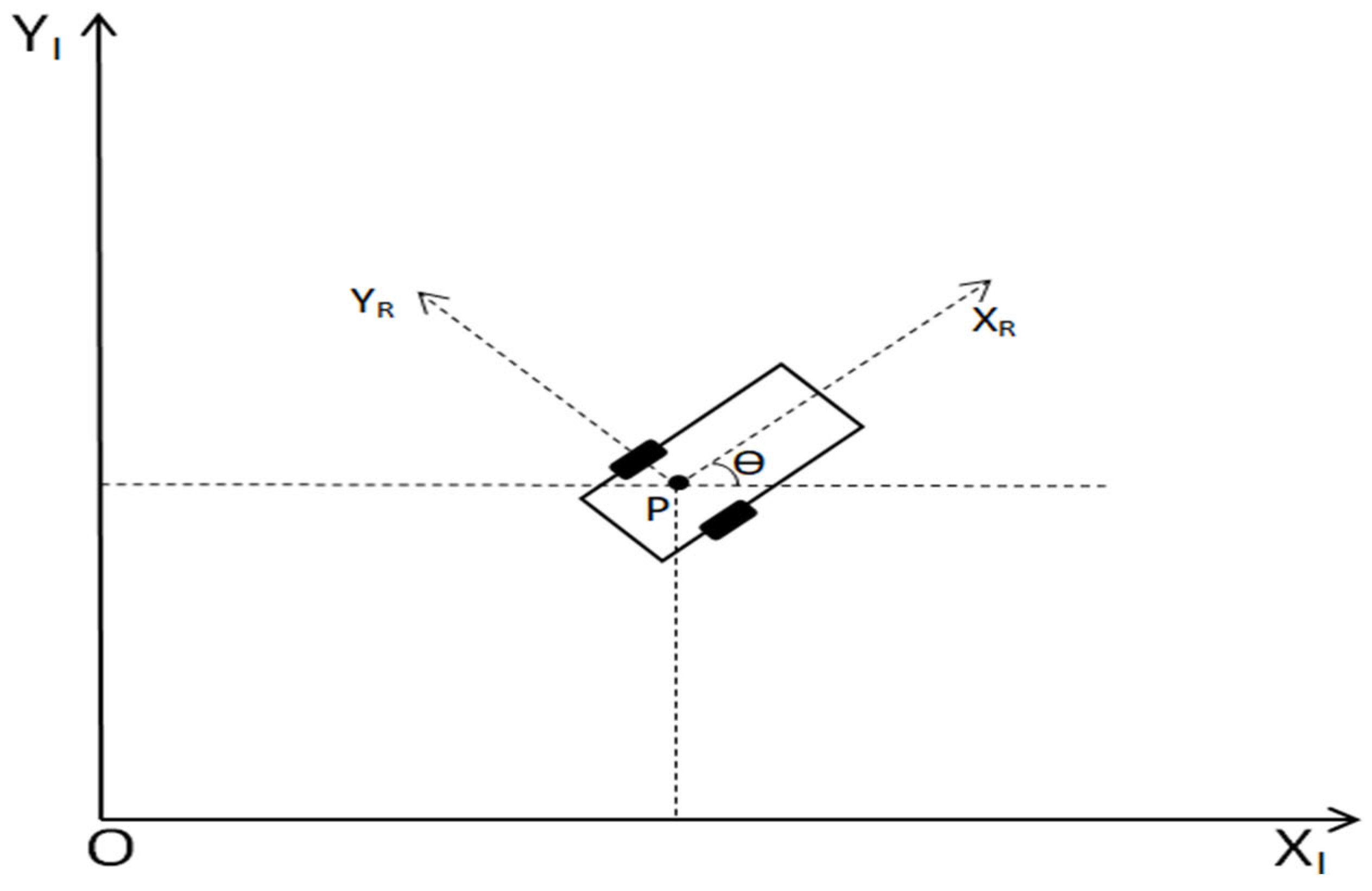
2.1. Kinematic Analysis of WMR
2.2. Dynamic Analysis of Mobile Robot
- denotes a matrix or function that is dependent on a You would need to specify B’s precise nature and how it depends on in your particular circumstance. may stand for a transformation matrix or a function associated with a specific component of the system under study, for example.
- τ: This vector represents the force or torque that is being applied. When employed in the context of dynamics, τ usually denotes outside forces or control inputs operating on a mechanical system.
- In this case, J is a Jacobian matrix.
2.3. Eliminate Modeling Uncertainties and Environmental Disturbances
3. Path and Motion Planning
4. Navigation of Mobile Robot
4.1. Indoor Navigation
4.1.1. Map-Based Navigation
4.1.2. Map-Building-Based Navigation
4.1.3. Mapless Navigation
4.2. Outdoor Navigation
4.2.1. Outdoor Navigation in Structured Environments
4.2.2. Outdoor Navigation in Unstructured Environments
5. Various Navigational Approach of WMR
5.1. Artificial Neural Network (NN) Technique
5.2. Genetic Algorithm Technique
5.3. Fuzzy Logic
5.4. Probabilistic Roadmap (PRM) Planning
- Sample configurations: The PRM algorithm starts by randomly sampling a set of configurations from the robot’s configuration space. Let Q be the configuration space, and q_sample be a randomly generated sample from Q, where q_sample ∈ Q.
- Validate configurations: Each sample is then checked to see if it is a valid configuration that the robot can reach without colliding with obstacles. This is achieved by performing collision detection using the robot’s sensor data or environment maps. Let C(q_sample) be the collision detection function that checks if q_sample is in the collision, where C(q_sample) = True if q_sample is in a collision and False otherwise.
- Connect valid configurations: Valid samples are then connected with edges in the roadmap to create a graph. Two configurations are connected if there exists a valid path between them. The edge weight between is typically set to the Euclidean distance between the two configurations. Let E be the set of edges between connected configurations, where e = = False, = False, and there exists a valid path between
- Find a path: The next step is to utilize a search technique, such as Dijkstra’s algorithm, to identify a path connecting the start and goal configurations in the graph. Assume that the graph created in step 3 is G = (V, E), with V being the collection of configurations. Let the start and target configurations be denoted by s and g, respectively. The Dijkstra algorithm determines the shortest route in G between s and g.
- Smooth the path: The final path can be smoothed to remove unnecessary turns and improve efficiency. This is typically achieved using path smoothing algorithms, such as the spline-based or polynomial-based methods.
- The PRM algorithm is probabilistic because it relies on random sampling to generate the roadmap and does not guarantee the optimal path. However, it is often effective and scalable, particularly in high-dimensional configuration spaces where other algorithms may struggle.
- Create a graph: Create a graph where each node represents a location in the 2D environment. The edges between nodes represent possible movements from one location to another.
- Initialize start and goal nodes: Set the start location as the starting node and the goal location as the goal node.
- Calculate heuristic function: Calculate the heuristic function h(n) for each node n. This can be achieved using a distance metric, such as Euclidean distance, to estimate the distance between the node and the goal location.
- Initialize costs: Set the cost of the start node g(start) to 0, and the cost of all other nodes to infinity.
- Add start node to open set: Add the start node to the open set, which is the set of nodes to be evaluated.
- Select the node with the lowest f(n) value from the open set.
- Stop the search and retrace the path if the chosen node is the goal node.
- Otherwise, for each neighbor of the selected node:
- Calculate the tentative cost of the path from the start node to the neighbor node, .
- If g’(neighbor) is less than the current cost of the neighbor node, update the cost of the neighbor node to g’(neighbor) and set its parent to the selected node.
- If the neighbor node is not already in the open set, include it and determine the f(n) value. If the goal node is not reached, return failure. Once the A* search algorithm has found a path, it can be represented as a sequence of nodes that correspond to locations in the 2D environment. The robot can then move along this path by following the sequence of locations. If obstacles are detected during movement, the algorithm can be rerun to find a new path around the obstacle.
5.5. Rapidly-Exploring Random Tree (RRT) Planning
| Algorithm 1: Rapidly-exploring random tree (RRT) planning. |
| Step 1: Initialize the tree with the start configuration as the root node. |
| Step 2: Repeat until the goal configuration is reached or a maximum number of nodes are added: |
| a. Sample a random configuration in the space. |
| b. Find the nearest node in the tree to the sampled configuration. |
| c. Generate a new node by extending the nearest node towards the sampled configuration, while ensuring that the robot does not collide with any obstacles. |
| d. Add the new node to the tree and connect it to its nearest neighbor. |
| Step 3: If the goal configuration is reached, return the path from the start to the goal configuration by backtracking through the tree from the goal node to the root node. |
| Step 4: The RRT algorithm is simple and efficient and can handle high-dimensional and complex spaces. It can also deal with moving obstacles by updating the tree in realtime. |
| Algorithm 2: Pseudocode for navigation planning. |
| S: a set of all valid configurations in the space. |
| q_start: the start configuration of the robot. |
| q_goal: the goal configuration of the robot. |
| K: maximum number of nodes to add to the tree. |
| T: tree of configurations, initially containing only q_start. |
| r: maximum distance to extend the tree towards a new configuration. |
| T ← {} |
| for k = 1 to K do |
| a. ←RandomConfiguration() |
| b. ←NearestNeighbor(, T) |
| c. ←Extend() |
| d. if CollisionFree() then |
| T ← T ∪ {, ()} |
| e. if Distance() ≤ ε then |
| return Path() |
| return Failure |
- RandomConfiguration() returns a random configuration in S.
- NearestNeighbor() returns the configuration in T that is closest to q_rand.
- Extend( returns a new configuration that is a distance r away from
- CollisionFree returns true if the path from q_near to q_new is collision-free.
- Distance returns the distance between
- ε is a small value that determines the proximity of
- Path returns the path from by backtracking through the tree T.
Model Predictive Control (MPC)
- a.
- Assumptions:
- b.
- Algorithm:
- The control input that minimizes the cost function subject to the system constraints is computed using an optimization solver.
- The first element of the optimal control input sequence is applied to the system as the control input, and the process is repeated at the next time step.
- c.
- Assumptions:
5.6. SLAM (Simultaneous Localization and Mapping)
5.7. Comparative Analysis of Existing Work
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, B.; Liu, Z.; Li, Q.; Prorok, A. Mobile robot path planning in dynamic environments through globally guided reinforcement learning. IEEE Robot. Autom. Lett. 2020, 5, 6932–6939. [Google Scholar] [CrossRef]
- Qi, J.; Yang, H.; Sun, H. MOD-RRT*: A sampling-based algorithm for robot path planning in dynamic environment. IEEE Trans. Ind. Electron. 2020, 68, 7244–7251. [Google Scholar] [CrossRef]
- Poornima, E.; Muthu, B.; Agrawal, R.; Kumar, S.P.; Dhingra, M.; Asaad, R.R. Fog robotics-based intelligence transportation system using line-of-sight intelligent transportation. Multimed. Tools Appl. 2023. [Google Scholar] [CrossRef]
- Nair, R.S.; Supriya, P. Robotic path planning using recurrent neural networks. In Proceedings of the 2020 11th International Conference on Computing, Communication and Networking Technologies (ICCCNT), Kharagpur, India, 1–3 July 2020; pp. 1–5. [Google Scholar]
- Ma, J.; Liu, Y.; Zang, S.; Wang, L. Robot path planning based on genetic algorithm fused with continuous Bezier optimization. Comput. Intell. Neurosci. 2020, 2020, 9813040. [Google Scholar] [CrossRef] [PubMed]
- Tang, B.; Xiang, K.; Pang, M.; Zhanxia, Z. Multi-robot path planning using an improved self-adaptive particle swarm optimization. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420936154. [Google Scholar] [CrossRef]
- Santos, L.C.; Santos, F.N.; Pires, E.S.; Valente, A.; Costa, P.; Magalhães, S. Path planning for ground robots in agriculture: A short review. In Proceedings of the 2020 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Ponta Delgada, Portugal, 15–17 April 2020; pp. 61–66. [Google Scholar]
- Han, S.D.; Yu, J. Ddm: Fast near-optimal multi-robot path planning using diversified-path and optimal sub-problem solution database heuristics. IEEE Robot. Autom. Lett. 2020, 5, 1350–1357. [Google Scholar] [CrossRef]
- Zhang, S.; Pu, J.; Si, Y. An adaptive improved ant colony system based on population information entropy for path planning of mobile robot. IEEE Access 2021, 9, 24933–24945. [Google Scholar] [CrossRef]
- Zhang, S.; Pu, J.; Si, Y.; Sun, L. Path planning for mobile robot using an enhanced ant colony optimization and path geometric optimization. Int. J. Adv. Robot. Syst. 2021, 18, 17298814211019222. [Google Scholar] [CrossRef]
- Wang, H.; Chen, W. Multi-robot path planning with due times. IEEE Robot. Autom. Lett. 2022, 7, 4829–4836. [Google Scholar] [CrossRef]
- Yang, X.; Xiong, N.; Xiang, Y.; Du, M.; Zhou, X.; Liu, Y. Path planning of mobile robot based on adaptive ant colony optimization. In Proceedings of the IECON 2021–47th Annual Conference of the IEEE Industrial Electronics Society, Toronto, ON, Canada, 13–16 October 2021; pp. 1–4. [Google Scholar]
- Muhammad, A.; Ali, M.A.; Turaev, S.; Shanono, I.H.; Hujainah, F.; Zubir, M.N.M.; Faiz, M.K.; Faizal, E.R.M.; Abdulghafor, R. Novel algorithm for mobile robot path planning in constrained environment. Comput. Mater Contin. 2022, 71, 2697–2719. [Google Scholar] [CrossRef]
- Zan, J.; Ku, P.; Jin, S. Research on robot path planning based on whale optimization algorithm. In Proceedings of the 2021 5th Asian Conference on Artificial Intelligence Technology (ACAIT) 2021, Haikou, China, 29–31 October 2021; pp. 500–504. [Google Scholar]
- Shao, J. Robot Path Planning Method Based on Genetic Algorithm. J. Phys. Conf. Ser. 2021, 1881, 022046. [Google Scholar] [CrossRef]
- Lin, G.; Zhu, L.; Li, J.; Zou, X.; Tang, Y. Collision-free path planning for a guava-harvesting robot based on recurrent deep reinforcement learning. Comput. Electron. Agric. 2021, 188, 106350. [Google Scholar] [CrossRef]
- Li, S.; Zhao, D.; Sun, Y.; Yang, J.; Wang, S. Path planning algorithm based on the improved RRT-connect for home service robot arms. In Proceedings of the 2021 IEEE International Conference on Intelligence and Safety for Robotics (ISR), Tokoname, Japan, 4–6 March 2021; pp. 403–407. [Google Scholar]
- Chakraborty, N.; Ghosal, A. Kinematics of wheeled mobile robots on uneven terrain. Mech. Mach. Theory 2004, 39, 1273–1287. [Google Scholar] [CrossRef]
- Parhi, D.R.; Deepak, B.B.V.L. Kinematic model of three wheeled mobile robots. J. Mech. Eng. Res. 2011, 3, 307–318. [Google Scholar]
- Deepak, B.B.V.L.; Parhi, D.R. Kinematic analysis of wheeled mobile robot. J. Autom. Syst. Eng. 2011, 5, 96–111. [Google Scholar]
- Nawawi, S.W.; Ahmad, M.N.; Osman, J.H.S.; Husain, A.R. Controller Design for Two-Wheels Inverted Pendulum Vehicle Using PISMC; Faculty of Electrical Engineering, University Technology Malaysia: Johor Bahru, Malaysia, 2008. [Google Scholar]
- Janchiv, A.; Batsaikhan, D.; hwan Kim, G.; Lee, S.G. Complete coverage path planning for multi-robots based on. In Proceedings of the 2011 11th International Conference on Control, Automation and Systems, Gyeonggi-do, Republic of Korea, 26–29 October 2011; pp. 824–827. [Google Scholar]
- Kim, M.-S.; Shin, J.-H.; Hong, S.-G.; Lee, J.-J. Designing a robust adaptive dynamic controller for non-holonomic mobile robots under modeling uncertainty and disturbances. Mechatronics 2003, 13, 507–519. [Google Scholar] [CrossRef]
- Rovira, A.G.; Mirats Tur, J.M. Control and simulation of a tensegrity-based mobile robot. Robot. Auton. Syst. 2009, 57, 526–535. [Google Scholar] [CrossRef]
- Yuan, J.; Huang, Y.; Tao, T.; Sun, F. A cooperative approach for multi-robot area exploration. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 1390–1395. [Google Scholar]
- Liu, S.; Li, S.; Pang, L.; Hu, J.; Chen, H.; Zhang, X. Autonomous exploration and map construction of a mobile robot based on the TGHM algorithm. Sensors 2020, 20, 490. [Google Scholar] [CrossRef]
- Renzaglia, A.; Doitsidis, L.; Martinelli, A.; Kosmatopoulos, E.B. Multi-robot three-dimensional coverage of unknown areas. Int. J. Robot. Res. 2012, 31, 738–752. [Google Scholar] [CrossRef]
- Wang, Q.; Li, J.; Yang, L.; Yang, Z.; Li, P.; Xia, G. Distributed Multi-Mobile Robot Path Planning and Obstacle Avoidance Based on ACO–DWA in Unknown Complex Terrain. Electronics 2022, 11, 2144. [Google Scholar] [CrossRef]
- Burgard, W.; Moors, M.; Stachniss, C.; Schneider, F.E. Coordinated multi-robot exploration. IEEE Trans. Robot. 2005, 21, 376–386. [Google Scholar] [CrossRef]
- Bhattacharya, S.; Ghrist, R.; Kumar, V. Multi-robot coverage and exploration in non-Euclidean metric spaces. In Algorithmic Foundations of Robotics X: Proceedings of the Tenth Workshop on the Algorithmic Foundations of Robotics; Springer: Berlin/Heidelberg, Germany, 2013; pp. 245–262. [Google Scholar]
- Minguez, J.; Montano, L. Abstracting vehicle shape and kinematic constraints from obstacle avoidance methods. Springer Sci. Auton. Robot. 2006, 20, 43–59. [Google Scholar] [CrossRef]
- Zhu, A.; Yang, S.X. Neuro-fuzzy based approach to mobile robot navigation inunknown environments. IEEE Trans. Syst. Man Cybern. Part C 2007, 37, 610–621. [Google Scholar] [CrossRef]
- Ang, M.H., Jr.; Oetomo, E. Singularity-free joint actuation in omnidirectional mobile platforms with powered offset caster wheels. ASME J. Mech. Des. 2008, 130, 054501. [Google Scholar]
- Puig, D.; García, M.A.; Wu, L. A new global optimization strategy for coordinated multi-robot exploration: Development and comparative evaluation. Robot. Auton. Syst. 2011, 59, 635–653. [Google Scholar] [CrossRef]
- Astolfl, A. Exponential stabilization of a wheeled mobile robot via discontinuous control. ASME 1999, 121, 121–126. [Google Scholar]
- Lei, T.; Luo, C.; Jan, G.E.; Bi, Z. Deep learning-based complete coverage path planning with re-joint and obstacle fusion paradigm. Front. Robot. AI 2022, 9, 843816. [Google Scholar] [CrossRef]
- Wu, L.; PuigValls, D.; García García, M.Á. Balanced multi-robot exploration through a global optimization strategy. J. Phys. Agents 2010, 4, 35–44. [Google Scholar] [CrossRef]
- Lin, W.S.; Chang, L.H.; Yang, P.C. Adaptive critic anti-slip control of wheeled autonomous robot. IET Control Theory Appl. 2007, 1, 51–57. [Google Scholar] [CrossRef]
- Siegwart, R.; Nourbakhsh, I.R. Introduction to Autonomous Mobile Robots; A Bradford books; The MIT Press: Cambridge, MA, USA; London, UK, 2004. [Google Scholar]
- Bar, A.; Dale, S. Dynamic modeling and stabilization of wheeled mobile robot. In Proceedings of the International Conference on Dynamical Systems and Control, La Laguna, Spain, 1–3 July 2009. [Google Scholar]
- Aguiar, A.P.; Atassi, A.N.; Pascoal, A. Stabilization of a non-holonomic dynamic wheeled mobile robot with parametric modeling uncertainty using lyapunov functions. In Proceedings of the 4th Portuguese Conference on Automatic Control, Guimares, Portugal, 4–6 October 2000. [Google Scholar]
- Azizi, M.R.; Rastegarpanah, A.; Stolkin, R. Motion Planning and Control of an Omnidirectional Mobile Robot in Dynamic Environments. Robotics 2021, 10, 48. [Google Scholar] [CrossRef]
- Gholipour, A.; Yazdanpanah, M.J. Dynamic tracking control of non-holonomic mobile robot with model reference adaptation for uncertain parameters. In Proceedings of the 2003 European Control Conference (ECC), Cambridge, UK, 1–4 September 2003. [Google Scholar]
- Ibrahim, M.Y.; Fernandes, A. Study on mobile robot navigation techniques Industrial Technology. In Proceedings of the 2004 IEEE International Conference on Industrial Technology, Hammamet, Tunisia, 8–10 December 2004; Volume 1, pp. 230–236. [Google Scholar]
- Miah, M.S.; Knoll, J. Area coverage optimization using heterogeneous robots: Algorithm and implementation. IEEE Trans. Instrum. Meas. 2018, 67, 1380–1388. [Google Scholar] [CrossRef]
- Luo, C.; Yang, S.X.; Mo, H.; Li, X. Safety aware robot coverage motion planning with virtual-obstacle-based navigation. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; pp. 2110–2115. [Google Scholar]
- Araki, B.; Strang, J.; Pohorecky, S.; Qiu, C.; Naegeli, T.; Rus, D. Multi-robot path planning for a swarm of robots that can both fly and drive. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5575–5582. [Google Scholar]
- Maaref, H.; Barret, C. Sensor-based navigation of a mobile robot in an indoor environment. Robot. Auton. Syst. 2002, 38, 1–18. [Google Scholar] [CrossRef]
- Jazayeri, A.; Fatehi, A.; Taghirad, H. Mobile robot navigation in an unknown environment. In Proceedings of the 9th IEEE International Workshop on Advanced Motion Control, Istanbul, Turkey, 27–29 March 2006; pp. 295–299. [Google Scholar]
- Kim, M.Y.; Cho, H. An active trinocular vision system of sensing indoor navigation environment for mobile robots. Sens. Actuators 2006, 125, 192–209. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. Viable path planning for data collection robots in a sensing field with obstacles. Comput. Commun. 2017, 111, 84–96. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, S. Distributed biased min-consensus with applications to shortest path planning. IEEE Trans. Autom. Control 2017, 62, 5429–5436. [Google Scholar] [CrossRef]
- Yang, D.-H.; Hong, S.-K. A roadmap construction algorithm for mobile robot path planning using skeleton maps. Adv. Robot. 2007, 21, 51–63. [Google Scholar] [CrossRef]
- Guzman, J.L.; Berenguel, M.; Rodrıguez, F.; Dormido, S. An interactive tool for mobile robot motion planning. Robot. Auton. Syst. 2008, 56, 396–409. [Google Scholar] [CrossRef]
- Joshi, V.A.; Banavar, R.N.; Hippalgaonkar, R. Design and analysis of a spherical mobile robot. Mech. Mach. Theory 2009, 45, 130–136. [Google Scholar] [CrossRef]
- Tzafestas, S.G.; Tzamtzi, M.P.; Rigatos, G.G. Robust motion planning and control of mobile robots for collision avoidance in terrains with moving objects. Math. Comput. Simul. 2002, 59, 279–292. [Google Scholar] [CrossRef]
- Tsianos, K.I.; Scan, I.A.; Kavraki, L.E. Sampling-based robot motion planning: Towards realistic applications. Comput. Sci. Rev. 2007, 1, 2–11. [Google Scholar] [CrossRef]
- Fainekos, G.E.; Girard, A.; Kress-Gazit, H. George Journal Pappas, Temporal logic motion planning for dynamic robots. Automatica 2009, 45, 343–352. [Google Scholar] [CrossRef]
- Akbaripour, H.; Masehian, E. Semi-lazy probabilistic roadmap: A parameter-tuned, resilient and robust path planning method for manipulator robots. Int. J. Adv. Manuf. Technol. 2017, 89, 1401–1430. [Google Scholar] [CrossRef]
- Barfoot, T.D.; Clark, C.M. Motion planning for formations of mobile robots. Robot. Auton. Syst. 2004, 46, 65–78. [Google Scholar] [CrossRef]
- Bhatt, R.M.; Tang, C.P.; Krovi, V.N. Formation optimization for a fleet of wheeled mobile robots: A geometric approach. Robot. Auton. Syst. 2009, 57, 102–120. [Google Scholar] [CrossRef]
- Gao, J.; Ye, W.; Guo, J.; Li, Z. Deep Reinforcement Learning for Indoor Mobile Robot Path Planning. Sensors 2020, 20, 5493. [Google Scholar] [CrossRef] [PubMed]
- Garrido, S.; Moreno, L.; Blanco, D.; Jurewicz, P. Path planning for mobile robot navigation using voronoi diagram and fast marching. Int. J. Robot. Autom. 2011, 2, 42–64. [Google Scholar]
- Chiddarwar, S.S.; Babu, N.R. Conflict free coordinated path planning for multiple robots using a dynamic path modification sequence. Robot. Auton. Syst. 2011, 59, 508–518. [Google Scholar] [CrossRef]
- Parhi, D.R.; Singh, M.K. Real time navigational control of mobile robots using an artificial neural network. J. Mech. Eng. Sci. Part C 2009, 223, 1713–1725. [Google Scholar] [CrossRef]
- Liu, J.; Chen, Z.; Zhang, Y.; Li, W. Path planning of mobile robots based on improved Genetic algorithm. In Proceedings of the 2020 2nd International Conference on Robotics, Intelligent Control and Artificial Intelligence, Suzhou, China, 1–3 May 2020; pp. 49–53. [Google Scholar]
- Suzuki, M.; Floreano, D.; Paolo, E.A.D. The contribution of active body movement to visual development in evolutionary robots. Neural Netw. 2005, 18, 656–665. [Google Scholar] [CrossRef] [PubMed]
- Maurović, I.; Seder, M.; Lenac, K.; Petrović, I. Path planning for active SLAM based on the D* algorithm with negative edge weights. IEEE Trans. Syst. Man Cybern. Syst. 2017, 48, 1321–1331. [Google Scholar] [CrossRef]
- Luo, M.; Hou, X.; Yang, J. Surface optimal path planning using an extended Dijkstra algorithm. IEEE Access 2020, 8, 147827–147838. [Google Scholar] [CrossRef]
- Fukao, T.; Nakagawa, H.; Adachi, N. Adaptive Tracking Control of a Non-holonomic Mobile Robot. IEEE Trans. Robot. Autom. 2000, 16, 609–615. [Google Scholar] [CrossRef]
- Gu, D.; Hu, H. Neural predictive control for a car-like mobile robot. Robot. Auton. Syst. 2002, 39, 73–86. [Google Scholar] [CrossRef]
- Ghatee, M.; Mohades, A. Motion planning in order to optimize the length and clearance applying a Hopfield neural network. Expert Syst. Appl. 2009, 36, 4688–4695. [Google Scholar] [CrossRef]
- Kala, R.; Shukla, A.; Tiwari, R. Robotic path planning in static environment using hierarchical multi-neuron heuristic search and probability based fitness. Neurocomputing 2011, 74, 2314–2335. [Google Scholar] [CrossRef]
- Ouarda, H. A neural network-based navigation for intelligent autonomous mobile robots. Int. J. Math. Models Methods Appl. Sci. 2010, 4, 177–186. [Google Scholar]
- Wang, M.; Liu, J.N.K. Fuzzy logic-based robot path planning in unknown environment. Mach. Learn. Cybern. 2005, 2, 813–818. [Google Scholar]
- Panov, A.I.; Yakovlev, K. Behavior and path planning for the coalition of cognitive robots in smart relocation tasks. In Robot Intelligence Technology and Applications 4: Results from the 4th International Conference on Robot Intelligence Technology and Applications; Springer International Publishing: Berlin/Heidelberg, Germany, 2017; pp. 3–20. [Google Scholar]
- Zhang, H.Y.; Lin, W.M.; Chen, A.X. Path planning for the mobile robot: A review. Symmetry 2018, 10, 450. [Google Scholar] [CrossRef]
- Kim, M.; Han, D.K.; Park, J.H.; Kim, J.S. Motion planning of robot manipulators for a smoother path using a twin delayed deep deterministic policy gradient with hindsight experience replay. Appl. Sci. 2020, 10, 575. [Google Scholar] [CrossRef]
- Tuncer, A.; Yildirim, M. Dynamic path planning of mobile robots with improved genetic algorithm. Comput. Electr. Eng. 2012, 38, 1564–1572. [Google Scholar] [CrossRef]
- Wang, X.; Luo, X.; Han, B.; Chen, Y.; Liang, G.; Zheng, K. Collision-free path planning method for robots based on an improved rapidly-exploring random tree algorithm. Appl. Sci. 2020, 10, 1381. [Google Scholar] [CrossRef]
- Xu, R.; Wang, Q.; Shi, L.; Chen, L. Design of multi-robot path planning system based on hierarchical fuzzy control. Procedia Eng. 2011, 15, 235–239. [Google Scholar]
- Wu, M.; Dai, S.L.; Yang, C. Mixed reality enhanced user interactive path planning for omnidirectional mobile robot. Appl. Sci. 2020, 10, 1135. [Google Scholar] [CrossRef]
- Wang, X.; Liu, Z.; Liu, J. Mobile robot path planning based on an improved A* algorithm. In Proceedings of the International Conference on Computer Graphics, Artificial Intelligence, and Data Processing (ICCAID 2022), Guangzhou, China, 23–25 December 2022; Volume 12604, pp. 1093–1098. [Google Scholar]
- Lin, S.; Liu, A.; Wang, J.; Kong, X. An intelligence-based hybrid PSO-SA for mobile robot path planning in warehouse. J. Comput. Sci. 2023, 67, 101938. [Google Scholar] [CrossRef]
- Najjaran, H.; Goldenberg, A. Real-time motion planning of an autonomous mobile manipulator using a fuzzy adaptive Kalman filter. Robot. Auton. Syst. 2007, 55, 96–106. [Google Scholar] [CrossRef]
- Yukihiko, O.; Uchiyama, H.; Potter, W.D. A mobile robot for corridor navigation: A multi-agent approach. In Proceedings of the 42nd Annual Southeast Regional Conference, ACM-SE 42, New York, NY, USA, 2–3 April 2004. [Google Scholar]
- Hung, L.C.; Chung, H.Y. Design of hierarchical fuzzy logic control for mobile robot system, Robotics and Automation. IEEE Trans. 2006, 18, 235–239. [Google Scholar]
- Qin, H.; Shao, S.; Wang, T.; Yu, X.; Jiang, Y.; Cao, Z. Review of Autonomous Path Planning Algorithms for Mobile Robots. Drones 2023, 7, 211. [Google Scholar] [CrossRef]
- Cao, Y.; Wang, Y.; Vashisth, A.; Fan, H.; Sartoretti, G.A. CAtNIPP: Context-aware attention-based network for informative path planning. PMLR 2023, 205, 1928–1937. [Google Scholar]
- Ekrem, Ö.; Aksoy, B. Trajectory planning for a 6-axis robotic arm with particle swarm optimization algorithm. Eng. Appl. Artif. Intell. 2023, 122, 106099. [Google Scholar] [CrossRef]
- Muñoz, J.; López, B.; Quevedo, F.; Barber, R.; Garrido, S.; Moreno, L. Geometrically constrained path planning for robotic grasping with Differential Evolution and Fast Marching Square. Robotica 2023, 41, 414–432. [Google Scholar] [CrossRef]
- Shi, K.; Wu, Z.; Jiang, B.; Karimi, H.R. Dynamic path planning of mobile robot based on improved simulated annealing algorithm. J. Frankl. Inst. 2023, 360, 4378–4398. [Google Scholar] [CrossRef]
- Lin, S.; Liu, A.; Wang, J.; Kong, X. A Review of Path-Planning Approaches for Multiple Mobile Robots. Machines 2022, 10, 773. [Google Scholar] [CrossRef]
- Gul, F.; Mir, I.; Alarabiat, D.; Alabool, H.M.; Abualigah, L.; Mir, S. Implementation of bio-inspired hybrid algorithm with mutation operator for robotic path planning. J. Parallel Distrib. Comput. 2022, 169, 171–184. [Google Scholar] [CrossRef]
- An, R.; Guo, S.; Zheng, L.; Hirata, H.; Gu, S. Uncertain moving obstacles avoiding method in 3D arbitrary path planning for a spherical underwater robot. Robot. Auton. Syst. 2022, 151, 104011. [Google Scholar] [CrossRef]
- Jiang, L.; Liu, S.; Cui, Y.; Jiang, H. Path planning for robotic manipulator in complex multi-obstacle environment based on improved_RRT. IEEE/ASME Trans. Mechatron. 2022, 27, 4774–4785. [Google Scholar] [CrossRef]
- Kyaw, P.T.; Le, A.V.; Veerajagadheswar, P.; Elara, M.R.; Thu, T.T.; Nhan, N.H.K.; Duc, P.V.; Vu, M.B. Energy-efficient path planning of reconfigurable robots in complex environments. IEEE Trans. Robot. 2022, 38, 2481–2494. [Google Scholar] [CrossRef]
- Kumar, S.; Dadas, S.S.; Parhi, D.R. Path planning of mobile robot using modified DAYKUN-BIP virtual target displacement method in static environments. Wirel. Pers. Commun. 2023, 128, 2287–2305. [Google Scholar] [CrossRef]
- Ntakolia, C.; Moustakidis, S.; Siouras, A. Autonomous path planning with obstacle avoidance for smart assistive systems. Expert Syst. Appl. 2023, 213, 119049. [Google Scholar] [CrossRef]
- Chen, L.; Wang, Y.; Miao, Z.; Mo, Y.; Feng, M.; Zhou, Z.; Wang, H. Transformer-based Imitative Reinforcement Learning for Multi-Robot Path Planning. IEEE Trans. Ind. Inform. 2023, 19, 10233–10243. [Google Scholar] [CrossRef]
- Aslan, M.F.; Durdu, A.; Sabanci, K. Goal distance-based UAV path planning approach, path optimization and learning-based path estimation: GDRRT*, PSO-GDRRT* and BiLSTM-PSO-GDRRT. Appl. Soft Comput. 2023, 137, 110156. [Google Scholar] [CrossRef]
- An, D.; Mu, Y.; Wang, Y.; Li, B.; Wei, Y. Intelligent Path Planning Technologies of Underwater Vehicles: A Review. J. Intell. Robot. Syst. 2023, 107, 22. [Google Scholar] [CrossRef]
- Kumar, S.; Sikander, A. An intelligent optimize path planner for efficient mobile robot path planning in a complex terrain. Microsyst. Technol. 2023, 29, 469–487. [Google Scholar] [CrossRef]
- Cai, J.; Du, A.; Liang, X.; Li, S. Prediction-Based Path Planning for Safe and Efficient Human–Robot Collaboration in Construction via Deep Reinforcement Learning. J. Comput. Civ. Eng. 2023, 37, 04022046. [Google Scholar] [CrossRef]
- Weingartshofer, T.; Bischof, B.; Meiringer, M.; Hartl-Nesic, C.; Kugi, A. Optimization-based path planning framework for industrial manufacturing processes with complex continuous paths. Robot. Comput.-Integr. Manuf. 2023, 82, 102516. [Google Scholar] [CrossRef]
- Liu, L.; Wang, X.; Yang, X.; Liu, H.; Li, J.; Wang, P. Path Planning Techniques for Mobile Robots: Review and Prospect. Expert Syst. Appl. 2023, 227, 120254. [Google Scholar] [CrossRef]
- Bilal, H.; Yin, B.; Kumar, A.; Ali, M.; Zhang, J.; Yao, J. Jerk-bounded trajectory planning for rotary flexible joint manipulator: An experimental approach. Soft Comput. 2023, 27, 4029–4039. [Google Scholar] [CrossRef]
- Luan, P.G.; Thinh, N.T. Hybrid genetic algorithm based smooth global-path planning for a mobile robot. Mech. Based Des. Struct. Mach. 2023, 51, 1758–1774. [Google Scholar] [CrossRef]
- Jin, J.; Zhang, Y.; Zhou, Z.; Jin, M.; Yang, X.; Hu, F. Conflict-based search with D* lite algorithm for robot path planning in unknown dynamic environments. Comput. Electr. Eng. 2023, 105, 108473. [Google Scholar] [CrossRef]
- Singh, I.; Blukis, V.; Mousavian, A.; Goyal, A.; Xu, D.; Tremblay, J.; Fox, D.; Thomason, J.; Garg, A. Progprompt: Generating situated robot task plans using large language models. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; pp. 11523–11530. [Google Scholar]
- Shridhar, M.; Manuelli, L.; Fox, D. Perceiver-actor: A multi-task transformer for robotic manipulation. PMLR 2023, 205, 785–799. [Google Scholar]
- Liu, Y.; Ping, Y.; Zhang, L.; Wang, L.; Xu, X. Scheduling of decentralized robot services in cloud manufacturing with deep reinforcement learning. Robot. Comput.-Integr. Manuf. 2023, 80, 102454. [Google Scholar] [CrossRef]
- Mees, O.; Zeng, A.; Burgard, W. Visual language maps for robot navigation. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; pp. 10608–10615. [Google Scholar]
- Wang, W.; Guo, Q.; Yang, Z.; Jiang, Y.; Xu, J. A state-of-the-art review on robotic milling of complex parts with high efficiency and precision. Robot. Comput.-Integr. Manuf. 2023, 79, 102436. [Google Scholar] [CrossRef]
- Klenert, D.; Fernandez-Macias, E.; Anton, J.I. Do robots really destroy jobs? Evidence from Europe. Econ. Ind. Democr. 2023, 44, 280–316. [Google Scholar] [CrossRef]
- Tokgoz, E.; Levitt, S.; Sosa, D.; Carola, N.A.; Patel, V. Robotics applications in total knee arthroplasty. In Total Knee Arthroplasty: A Review of Medical and Biomedical Engineering and Science Concepts; Springer: Berlin/Heidelberg, Germany, 2023; pp. 155–174. [Google Scholar]
- Zarei, M.; Lee, G.; Lee, S.G.; Cho, K. Advances in biodegradable electronic skin: Material progress and recent applications in sensing, robotics, and human–machine interfaces. Adv. Mater. 2023, 35, 2203193. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, P.; Quan, J.; Li, L.; Zhang, G.; Zhou, D. Progress, challenges, and prospects of soft robotics for space applications. Adv. Intell. Syst. 2023, 5, 2200071. [Google Scholar] [CrossRef]
- Karamcheti, S.; Nair, S.; Chen, A.S.; Kollar, T.; Finn, C.; Sadigh, D.; Liang, P. Language-driven representation learning for robotics. arXiv 2023, arXiv:2302.12766. [Google Scholar]
- Hirose, N.; Shah, D.; Sridhar, A.; Levine, S. ExAug: Robot-conditioned navigation policies via geometric experience augmentation. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; pp. 4077–4084. [Google Scholar]
- Li, C.; Zheng, P.; Yin, Y.; Pang, Y.M.; Huo, S. An AR-assisted Deep Reinforcement Learning-based approach towards mutual-cognitive safe human-robot interaction. Robot. Comput.-Integr. Manuf. 2023, 80, 102471. [Google Scholar] [CrossRef]
- Lopez, I.B.; Benzakour, A.; Mavrogenis, A.; Benzakour, T.; Ahmad, A.; Lemée, J.M. Robotics in spine surgery: Systematic review of literature. Int. Orthop. 2023, 47, 447–456. [Google Scholar] [CrossRef]
- Stella, F.; Hughes, J. The science of soft robot design: A review of motivations, methods and enabling technologies. Front. Robot. AI 2023, 9, 1059026. [Google Scholar] [CrossRef]
- Kent, M.S.; Hartwig, M.G.; Vallières, E.; Abbas, A.E.; Cerfolio, R.J.; Dylewski, M.R.; Fabian, T.; Herrera, L.J.; Jett, K.G.; Lazzaro, R.S.; et al. Pulmonary Open, Robotic and Thoracoscopic Lobectomy (PORTaL) Study: Survival Analysis of 6,646 Cases. Ann. Surg. 2023, 277, 1002–1009. [Google Scholar] [CrossRef]
- Wu, L.; Huang, X.; Cui, J.; Liu, C.; Xiao, W. Modified adaptive ant colony optimization algorithm and its application for solving path planning of mobile robot. Expert Syst. Appl. 2023, 215, 119410. [Google Scholar] [CrossRef]
- Madariaga, L.; Allendes, C.; Nussbaum, M.; Barrios, G.; Acevedo, N. Offline and online user experience of gamified robotics for introducing computational thinking: Comparing engagement, game mechanics and coding motivation. Comput. Educ. 2023, 193, 104664. [Google Scholar] [CrossRef]
- Li, J.; Zou, L.; Luo, G.; Wang, W.; Lv, C. Enhancement and evaluation in path accuracy of industrial robot for complex surface grinding. Robot. Comput.-Integr. Manuf. 2023, 81, 102521. [Google Scholar] [CrossRef]
- Sinha, A.; Mishra, P.; Ramish, M.; Mahmood, H.R.; Upadhyay, K.K. Employing Unsupervised Learning Algorithm for Stock Market Analysis and Prediction. In Proceedings of the 2021 First International Conference on Advances in Computing and Future Communication Technologies (ICACFCT), Meerut, India, 16–17 December 2021; pp. 75–79. [Google Scholar] [CrossRef]
- Ramish, M.; Sinha, A.; Desai, J.; Raj, A.; Rajawat, Y.S.; Punia, P. IT Attack Detection and Classification using Users Event Log Feature And Behavior Analytics through Fourier EEG Signal. In Proceedings of the 2022 IEEE 11th International Conference on Communication Systems and Network Technologies (CSNT), Indore, India, 23–24 April 2022; pp. 577–582. [Google Scholar] [CrossRef]
- Sinha, A.; Ramish, M.; Kumari, S.; Jha, P.; Tiwari, M.K. ANN-ANT-LION-MLP Ensemble Transfer Learning Based Classifier for Detection and Classification of Oral Disease Severity. In Proceedings of the 2022 12th International Conference on Cloud Computing, Data Science & Engineering (Confluence), Noida, India, 27–28 January 2022; pp. 530–535. [Google Scholar] [CrossRef]
- Sinha, A.; Kumar, B.; Banerjee, P.; Ramish, M. HSCAD:Heart Sound Classification for Accurate Diagnosis using Machine Learning and MATLAB. In Proceedings of the 2021 International Conference on Computational Performance Evaluation (ComPE), Shillong, India, 1–3 December 2021; pp. 115–120. [Google Scholar] [CrossRef]
- Raj, A.; Jadon, S.; Kulshrestha, H.; Rai, V.; Arvindhan, M.; Sinha, A. Cloud Infrastructure Fault Monitoring and Prediction System using LSTM based predictive maintenance. In Proceedings of the 2022 10th International Conference on Reliability, Infocom Technologies and Optimization (Trends and Future Directions) (ICRITO), Noida, India, 13–14 October 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Bhargavi, M.; Sinha, A.; Desai, J.; Garg, N.; Bhatnagar, Y.; Mishra, P. Comparative Study of Consumer Purchasing and Decision Pattern Analysis using Pincer Search Based Data Mining Method. In Proceedings of the 2022 13th International Conference on Computing Communication and Networking Technologies (ICCCNT), Kharagpur, India, 3–5 October 2022; pp. 1–7. [Google Scholar] [CrossRef]
- Bhargavi, M.; Sinha, A.; Rao, G.M.; Bhatnagar, Y.; Kumar, S.; Pawar, S.R. Application of IoT for Proximity Analysis and Alert Generation for Maintaining Social Distancing. In Proceedings of the ISMS 2022: Key Digital Trends Shaping the Future of Information and Management Science; Lecture Notes in Networks and Systems; Springer: Cham, Switzerland, 2023; Volume 671. [Google Scholar] [CrossRef]
- Kumar, B.; Roy, S.; Singh, K.U.; Pandey, S.K.; Kumar, A.; Sinha, A.; Shukla, S.; Shah, M.A.; Rasool, A. A Static Machine Learning Based Evaluation Method for Usability and Security Analysis in E-Commerce Website. IEEE Access 2023, 11, 40488–40510. [Google Scholar] [CrossRef]
- Hai, T.; Zhou, J.; Lu, Y.; Jawawi, D.N.; Sinha, A.; Bhatnagar, Y.; Anumbe, N. Posterior probability and collaborative filtering based Heterogeneous Recommendations model for user/item Application in use case of IoVT. Comput. Electr. Eng. 2023, 105, 108532. [Google Scholar] [CrossRef]
- Wewerka, J.; Reichert, M. Robotic process automation-a systematic mapping study and classification framework. Enterp. Inf. Syst. 2023, 17, 1986862. [Google Scholar] [CrossRef]
- Abeyruwan, S.W.; Graesser, L.; D’Ambrosio, D.B.; Singh, A.; Shankar, A.; Bewley, A.; Jain, D.; Choromanski, K.; Sanketi, P.R. i-sim2real: Reinforcement learning of robotic policies in tight human-robot interaction loops. PMLR 2023, 205, 212–224. [Google Scholar]
- Wurm, K.M.; Hornung, A.; Bennewitz, M.; Stachniss, C.; Burgard, W. OctoMap: A probabilistic, flexible, and compact 3D map representation for robotic systems. In Proceedings of the ICRA 2010 Workshop on Best Practice in 3D Perception and Modeling for Mobile Manipulation, Anchorage, AK, USA, 3–7 May 2010; Volume 2, p. 3. [Google Scholar]
- Thrun, S.; Burgard, W.; Fox, D. A real-time algorithm for mobile robot mapping with applications to multi-robot and 3D mapping. In Proceedings of the 2000 ICRA Millennium Conference, IEEE International Conference on Robotics and Automation, Cat. No. 00CH37065. San Francisco, CA, USA, 24–28 April 2000; Volume 1, pp. 321–328. [Google Scholar]
- Borrmann, D.; Nüchter, A.; Ðakulović, M.; Maurović, I.; Petrović, I.; Osmanković, D.; Velagić, J. A mobile robot based system for fully automated thermal 3D mapping. Adv. Eng. Inform. 2014, 28, 425–440. [Google Scholar] [CrossRef]
- Hirose, S.; Ootsukasa, N.; Shirasu, T.; Kuwahara, H.; Yoneda, K. Fundamental considerations for the design of a planetary rover. In Proceedings of the 1995 IEEE International Conference on Robotics and Automation, Nagoya, Japan, 21–27 May 1995; Volume 2, pp. 1939–1944. [Google Scholar]
- Ding, L.; Deng, Z.; Gao, H.; Nagatani, K.; Yoshida, K. Planetary rovers’ wheel–soil interaction mechanics: New challenges and applications for wheeled mobile robots. Intell. Serv. Robot. 2011, 4, 17–38. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Kinematic and Dynamic Models | Stability Analysis Criteria | Trajectory Tracking | Control Design | Computational Time | Modeling Uncertainties | Environmental Disturbances | Success Rate (%) |
|---|---|---|---|---|---|---|---|---|
| Artificial neural networks | Yes | Lyapunov stability, CLFs | High | Design based on neural network training | Moderate to high | Can handle some uncertainties, depending on training | Can adapt to some disturbances if in training data | 82% |
| Genetic algorithms | Yes | Lyapunov stability, passivity-based stability | Moderate | Design based on genetic algorithm optimization | High | Can address uncertainties through the optimization process | May not inherently handle disturbances | 73% |
| Fuzzy logic control | Yes | Lyapunov stability, CLFs | High | Design based on fuzzy rules and membership functions | Low to moderate | Designed to handle uncertainties with linguistic variables and rules | Can adapt to some disturbances with appropriate rule sets | 89% |
| Firefly algorithm | Yes | Lyapunov stability, CLFs | High | Design based on algorithm optimization | Varies (moderately high) | Not inherently designed to handle uncertainties | Effectiveness may vary depending on the problem and adaptation mechanisms | 76% |
| Hybrid approaches | Yes | Lyapunov stability, CLFs | High | Design based on a combination of AI techniques | Varies (Depends on constituent methods) | Depends on the individual methods in the hybrid approach | Depends on the individual methods in the hybrid approach | 92% |
| Model predictive control | Yes | Lyapunov stability, CLFs | High | Design based on optimal control strategies | Moderate to high | Can address uncertainties through the optimization process | Can adapt to disturbances through real-time optimization | 87% |
| Particle swarm optimization | Yes | Lyapunov stability, CLFs | High | Design based on particle swarm optimization | Moderate to high | Can address uncertainties through an optimization process | May not inherently handle disturbances | 81% |
| Reinforcement learning | Yes | Lyapunov stability, CLFs | High | Design based on reward function optimization | Moderate to high | Can adapt to some uncertainties with robust training | Can adapt to disturbances through exploration and learning | 78% |
| Robust control | Yes | Lyapunov stability, CLFs | High | Design based on robust control theory | Low to moderate | Specifically designed for handling uncertainties with robust control techniques | Can handle disturbances with designed robustness | 85% |
| Sliding mode control | Yes | Lyapunov stability, CLFs | High | Design based on sliding mode control theory | Low to moderate | Specifically designed for handling uncertainties with sliding mode control techniques | Can handle disturbances with designed robustness | 80% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Borkar, K.K.; Aljrees, T.; Pandey, S.K.; Kumar, A.; Singh, M.K.; Sinha, A.; Singh, K.U.; Sharma, V. Stability Analysis and Navigational Techniques of Wheeled Mobile Robot: A Review. Processes 2023, 11, 3302. https://doi.org/10.3390/pr11123302
Borkar KK, Aljrees T, Pandey SK, Kumar A, Singh MK, Sinha A, Singh KU, Sharma V. Stability Analysis and Navigational Techniques of Wheeled Mobile Robot: A Review. Processes. 2023; 11(12):3302. https://doi.org/10.3390/pr11123302
Chicago/Turabian StyleBorkar, Kailash Kumar, Turki Aljrees, Saroj Kumar Pandey, Ankit Kumar, Mukesh Kumar Singh, Anurag Sinha, Kamred Udham Singh, and Vandana Sharma. 2023. "Stability Analysis and Navigational Techniques of Wheeled Mobile Robot: A Review" Processes 11, no. 12: 3302. https://doi.org/10.3390/pr11123302
APA StyleBorkar, K. K., Aljrees, T., Pandey, S. K., Kumar, A., Singh, M. K., Sinha, A., Singh, K. U., & Sharma, V. (2023). Stability Analysis and Navigational Techniques of Wheeled Mobile Robot: A Review. Processes, 11(12), 3302. https://doi.org/10.3390/pr11123302