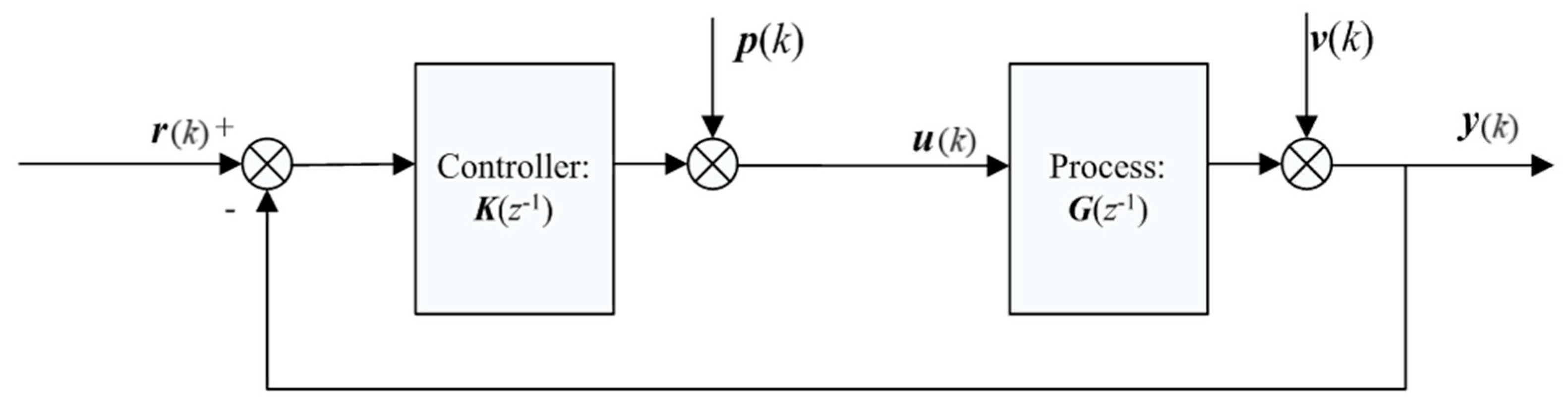
Closed loop control is a control method based on the output feedback of the control object. It corrects the regulator according to norms or standards when there is a deviation between the actual measurement and the set-point. Multivariable closed-loop systems are crucial in industrial processes, such as in model-based closed-loop control in the hydraulic fracturing process [
1], closed-loop control in the multi-column solvent gradient purification process [
2], etc. For many practical industrial processes, cutting off the feedback loop will cause processes to become out of control and will seriously affect production. Closed-loop system identification methods are generally categorized as direct, indirect, and joint input–output approaches [
3]. Previous research has shown that if the order of the controller (feedback channel) is not less than that of the process (forward channel), then the closed loop is identifiable [
4]. Gevers et al. theoretically provided necessary and sufficient conditions for the informativity of experiments in open-loop and closed-loop operations, and the same conclusion was obtained [
5]. Uematsu et al. proposed using routine operation data without extra excitation signals to identify closed-loop systems [
6,
7]. Vau et al. improved the closed-loop output error identification algorithm by establishing a predictor based on the generalized orthogonal transfer function, which was suitable for unstable systems or controllers [
8]. Shardt and Huang focused on the closed-loop identification condition while considering pole-zero cancellations and confirmed the condition further [
9]. Multivariable closed-loop systems can be effectively handled by state space models, decentralized identification, and subsystem identification. Notably, the abovementioned studies were based on a controller order that satisfies identifiable conditions [
10,
11,
12]. However, a multivariable closed-loop system whose controller order is lower than that of the process without interference noise in the feedback channel has not elicited much attention. The real issue lies in the linear correlation existing in the elements of the measured data vector through the feedback in multivariable systems, and this leads to the unidentifiability of the parameters [
12]. This situation is inevitable in practice, but only a few studies have been conducted on this aspect. Hence, further research in terms of industrial production is necessary.
Apart from the linear correlation among data vectors, random noise is also an important factor that affects the identification of closed-loop systems. The least squares (LS) algorithm has advantages in the case of white noise, and partial least squares (PLS) can solve an ill-conditioned solution via principal component analysis (PCA) [
13,
14]. Beyaztas et al. proposed a robust functional partial least squares method that allows for the robust estimation of regression coefficients in scalar multifunctional regression models [
15]. Lauri et al. proposed a PLS approach to identify predictive ARX models [
16]. The main objective was to identify open-loop systems without using PLS to deal with the correlation of closed-loop systems. LS is assumed to demonstrate poor robustness when random noise disobeys the normal distribution, such as impulse noise that obeys the
SαS distribution [
17,
18]. The least absolute deviation (LAD) algorithm reduces the sensitivity to impulse noise and enhances robustness; it is accessible for system identification. Motivated by the limitation of LS, LAD is selected as the objective function for handling impulse noise. Under this circumstance, LAD exhibits good statistical performance and irreplaceable superiority [
19]. However, from the perspective of the least absolute criteria function, the main problem of LAD is its undifferentiability, and a deterministic differentiable function can be introduced to solve non-smooth optimization problems [
20,
21]. Based on the approximate least absolute deviation criterion and principal component analysis, a recursive partial approximate least absolute deviation (PALAD) identification algorithm is deduced for multivariable closed-loop systems whose model order of feedback channel is lower than that of the forward channel in this paper. The direct identification method and PCA are used to eliminate linear correlations between data matrix elements and identify multivariable closed-loop systems. The measured data vector (composed of input and output measurement values of the controlled object) is projected into the low-dimensional characteristic space for decorrelation via PCA, which is the basis for the application of the open-loop identification algorithm in closed-loop system identification. A deterministic differentiable function is used to approximate the LAD criterion for constructing approximate least absolute deviation (ALAD) in connection with the non-differentiability of LAD.
The remainder of this paper is organized as follows.
Section 2 introduces the multivariable closed-loop identification object model and the noise model.
Section 3 introduces a PCA approach for dealing with the ill-condition problem caused by the correlation of measurement data, and deduces the PALAD identification algorithm. In
Section 4, based on PALAD, we analyze the identifiability for multivariable closed-loop systems. According to the modes in
Section 2,
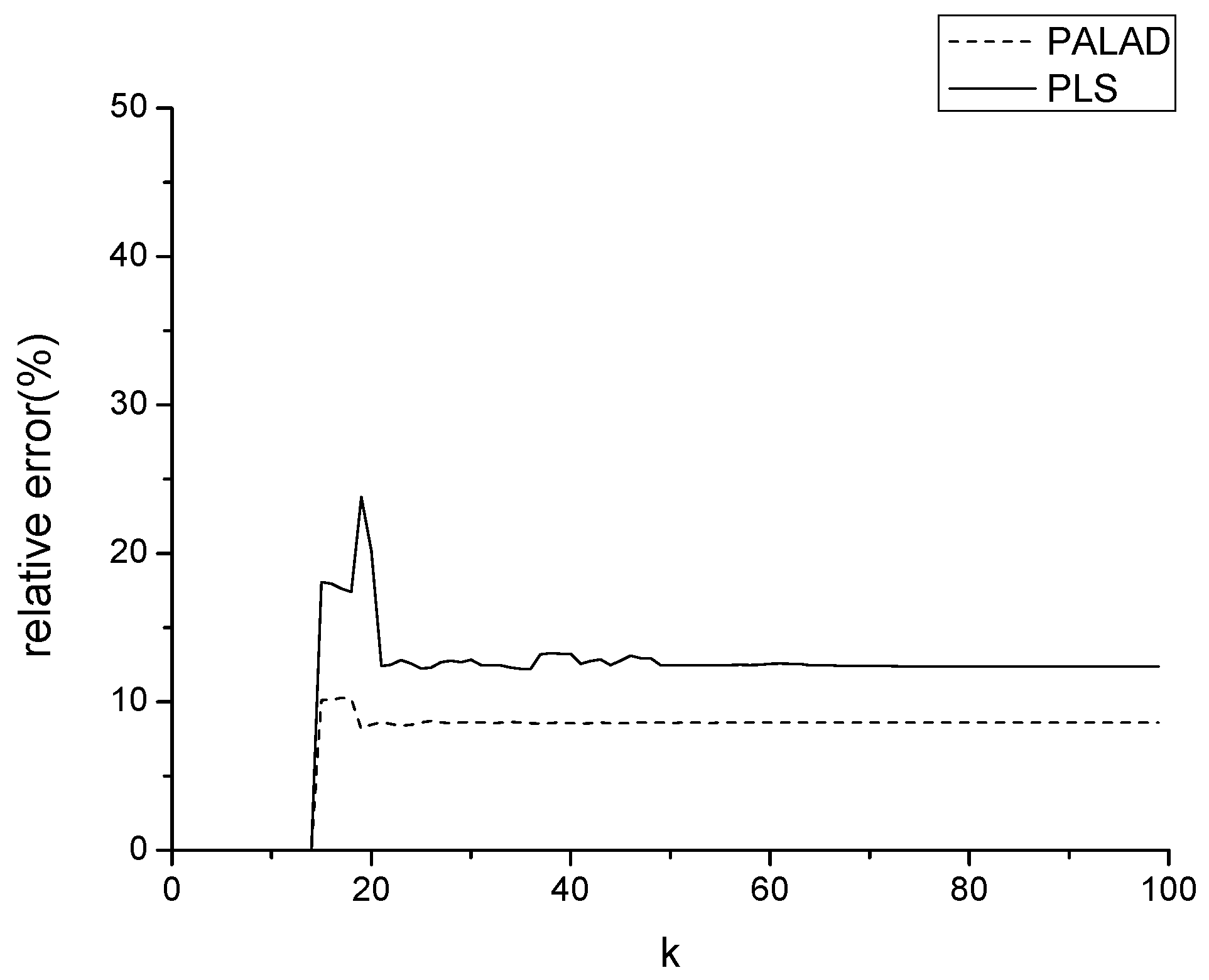
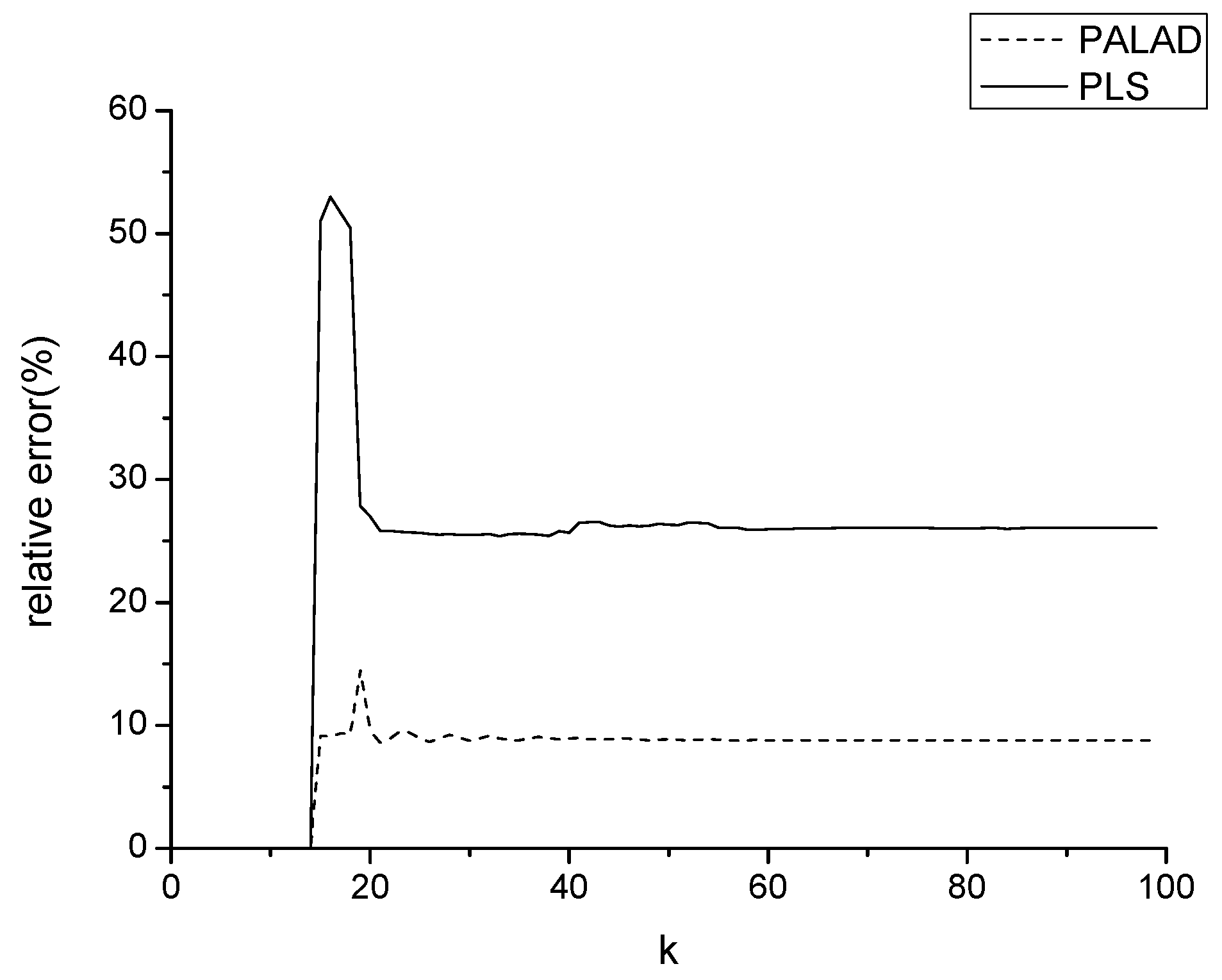
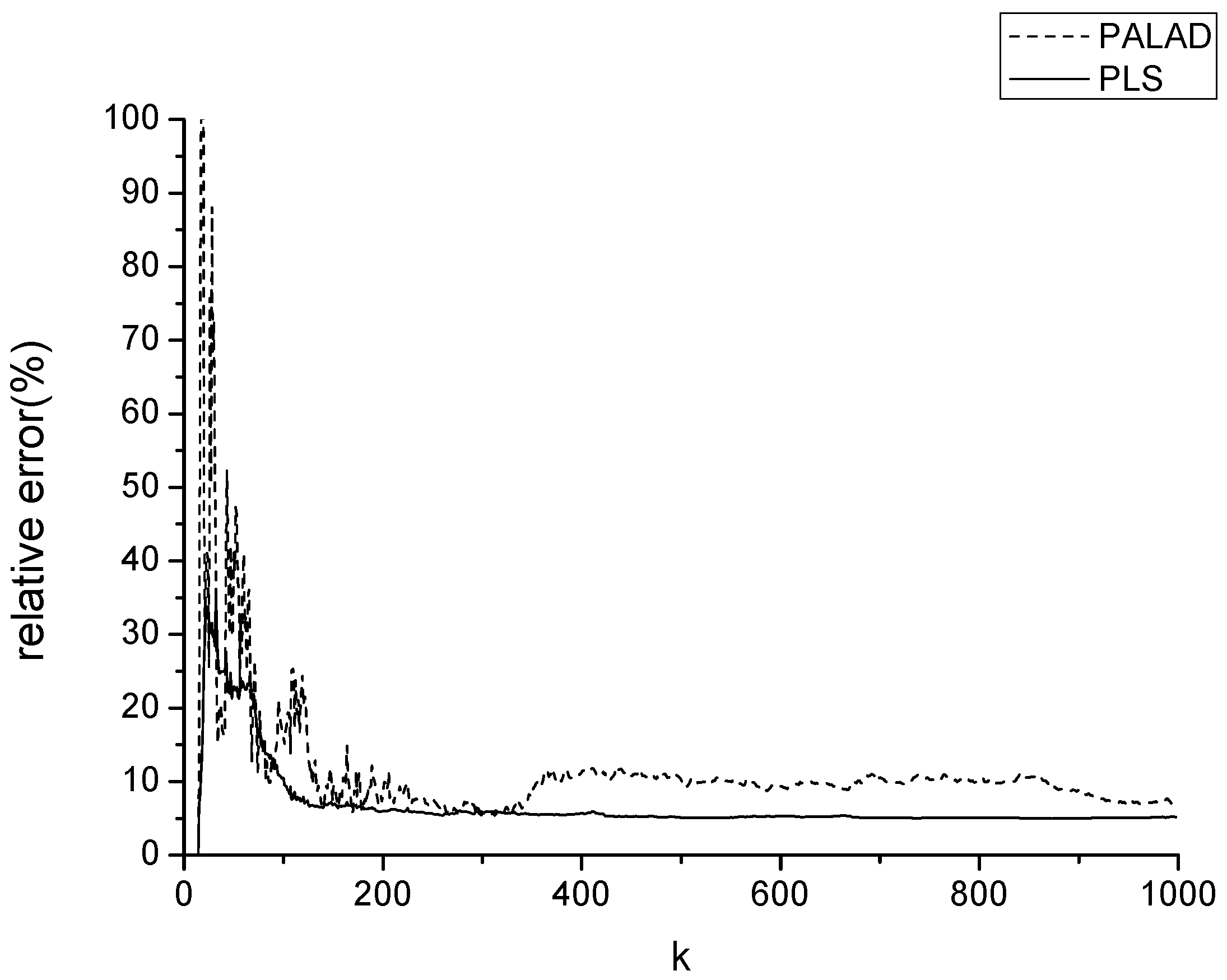
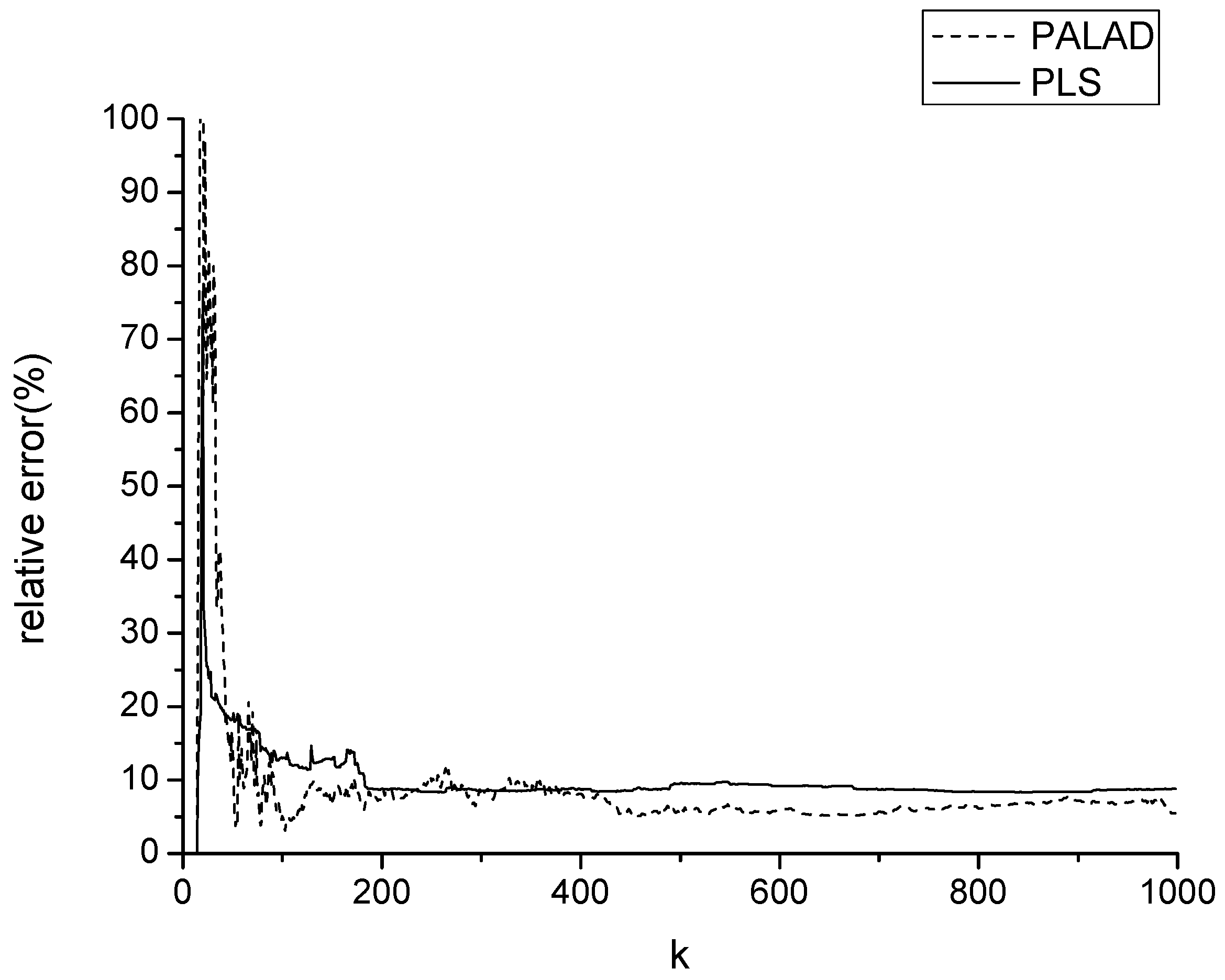
Section 5 compares the performance of PALAD and PLS identification algorithms. Finally, conclusions are drawn in
Section 6.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}