All articles published by MDPI are made immediately available worldwide under an open access license. No special
permission is required to reuse all or part of the article published by MDPI, including figures and tables. For
articles published under an open access Creative Common CC BY license, any part of the article may be reused without
permission provided that the original article is clearly cited. For more information, please refer to
https://www.mdpi.com/openaccess.
Feature papers represent the most advanced research with significant potential for high impact in the field. A Feature
Paper should be a substantial original Article that involves several techniques or approaches, provides an outlook for
future research directions and describes possible research applications.
Feature papers are submitted upon individual invitation or recommendation by the scientific editors and must receive
positive feedback from the reviewers.
Editor’s Choice articles are based on recommendations by the scientific editors of MDPI journals from around the world.
Editors select a small number of articles recently published in the journal that they believe will be particularly
interesting to readers, or important in the respective research area. The aim is to provide a snapshot of some of the
most exciting work published in the various research areas of the journal.
The relationship between finite-horizon mean-field stochastic control and Nash equilibrium strategies is investigated in this technical note. First, the finite-horizon mean-field stochastic bounded real lemma (SBRL) is established, which is key to developing the theory. Second, for mean-field stochastic differential equations (MF-SDEs) with control- and state-dependent noises, it is revealed that the existence of Nash equilibrium strategies is equivalent to the solvability of generalized differential Riccati equations (GDREs). Furthermore, the existence of Nash equilibrium strategies is equivalent to the solvability of control for MF-SDEs with control- and state-dependent noises. However, for mean-field stochastic systems with disturbance-dependent noises, these two problems are not equivalent. Finally, a sufficient and necessary condition is presented via coupled matrix-valued equations for the finite-horizon control of mean-field stochastic differential equations with disturbance-dependent noises.
Mixed control is one of the most popular control design approaches. It requires one to search for a controller, which can not only restrain the effect of external disturbance to some extent but also minimize an additional cost function when the worst-case disturbance is applied. Thus, mixed is more appealing in engineering practice than or control alone. Deterministic control and its practical applications have been extensively investigated [1,2]. Compared with the convex optimization approach [1], the Nash game approach is a more powerful method to deal with mixed control. It has been proven that the solvability of mixed control is equivalent to the existence of Nash equilibrium strategies in the deterministic case [2]. The controls for linear It-type stochastic differential and difference equations were discussed in 1998 [3] and 1999 [4], respectively. Based on SBRL, the authors in [5] studied the finite- and infinite-horizon stochastic mixed control of continuous-time systems with multiplicative noise. Since then, stochastic control has become a hot research topic and attracted the attention of many scholars [6,7,8,9,10,11,12,13,14,15,16]. In [6], the finite-horizon stochastic control was investigated for linear discrete time-varying systems with multiplicative noise. The corresponding infinite-horizon stochastic control, which is more complex, was also discussed. Furthermore, the results of the finite- and infinite-horizon control were also generalized to discrete-time time-varying Markovian jumps systems with multiplicative noise. As mentioned above, the solvability of mixed control is equivalent to the existence of Nash equilibrium strategies in the deterministic case [2], which is also true for stochastic systems with state-dependent noise. However, when the disturbance enters into the diffusion term, these two problems are not equivalent [6]. In [7], the results of mixed control and Nash equilibrium strategies were generalized to continuous-time stochastic Markovian jumps systems. Currently, there are still many authors studying mixed control and achieving much progress. The authors in [8] studied the state feedback control laws for Markov jump linear systems with state and mode-observation delays. In [9], the stochastic control problem for Poisson jump diffusion system driven by Brownian motion and Poisson process was investigated. Attention was also focused on the mixed control of nonlinear stochastic chaotic systems and partially unknown nonlinear stochastic systems [10,11]. The mixed state feedback and the mixed dynamic output feedback model reference control systems were designed using a parameter-dependent Lyapunov function in [12]. In the past few years, mixed control has been applied to unmanned aerial vehicles [13], the path tracking of autonomous vehicles [14], automated highway driving [15], and interconnected microgrids [16].
In this paper, the relationship between Nash equilibrium strategies and control of mean-field stochastic systems is considered. The results are the natural generalization of those in [6]. In addition to the state , input and disturbance , the system dynamics of mean-field stochastic systems also involves , and , which is different from the classical stochastic control problems. The mean-field theory has been successfully applied in economics, engineering, finance and games in the past few years. The theory of MF-SDEs can be traced back to [17], which presented a stochastic toy model for Vlasov’s kinetic equation of plasma. Since then, many important conclusions have been presented in characterizing MF-SDEs and relevant contents by many scholars [18,19,20,21,22,23]. Particularly, as applications, the authors in [22,23] investigated the Markowitz mean–variance portfolio selection and a class of mean-field LQ problems by using the stochastic maximum principle. The reader can see [24,25,26,27,28,29,30,31] for recent developments. In particular, the mean-field linear quadratic (MF-LQ) optimal control problem of MF-SDEs was first investigated in [24], where a sufficient and necessary condition was given to characterize the finite-horizon MF-LQ control problem of continuous-time stochastic systems. Furthermore, the infinite-horizon MF-LQ control problem for linear continuous-time stochastic systems was studied in [25], where the equivalence of several definitions of stability for MF-SDEs was presented. For MF-SDEs, the open-loop and closed-loop solvability of the problem were discussed in [25,26]. In particular, an LQ stochastic two-person nonzero-sum differential game was considered in [26]. The existence of open-loop Nash equilibria was described by the solvability of forward–backward SDEs, and that of closed-loop Nash equilibria was presented via the solvability of coupled symmetric Riccati differential equations. Corresponding finite- and infinite-horizon MF-LQ controls were studied in [27,28]. For discrete-time MF-SDEs, the authors in [29] presented a solvability condition for its finite-horizon LQ control problem in terms of operator-type conditions. In addition, using the matrix dynamical optimization method, the explicit optimal controller was derived. Furthermore, for the corresponding infinite-horizon case, the equivalence of some stabilizability notions for MF-SDEs was investigated, and the solution to the associated algebra Riccati equation was presented in [30]. For continuous-time MF-SDEs with state- and disturbance-dependent noise, finite-horizon mixed / control was studied in [31]. In the last few years, the mean-field formulation has been applied in various fields of finance, economics, games and engineering.
To the best of our knowledge, there have been no other results on the relationship between Nash equilibrium strategies and mean-field stochastic mixed control. In this paper, we shall investigate the relationship between Nash equilibrium strategies and mixed control of mean-field stochastic differential equations with multiplicative noise, and provide a deeper characterization than that in [31]. We describe the main ideas as follows. First, we study the pure stochastic control problem, and obtain that the effect of external disturbance on the regulated output less than a given positive number is equivalent to the solvability of the generalized differential Riccati equation by It’s formula and the technique of completing squares. Then, based on It’s formula and the well-known results on the mean-field stochastic linear quadratic (LQ) optimal control problem, the existence of the Nash equilibrium point is equivalent to the solvability of the generalized differential Riccati equation. Furthermore, for continuous-time mean-field stochastic systems with control- and state-dependent noises, we conclude that the existence of Nash equilibrium strategies is equivalent to the solvability of mixed control. However, when the diffusion term involves disturbance, the above equivalence relationship does not hold. In this case, we present a sufficient and necessary condition to characterize the finite-horizon control in terms of coupled matrix-valued equations. Finally, we conclude that the equivalence relationship depends upon whether the diffusion term involves disturbance or not.
The remainder of this paper is organized as follows: In Section 2, we present some preliminaries. A finite-horizon SBRL for MF-SDEs is investigated in Section 3, and a sufficient and necessary condition is shown for MF-SDEs with disturbance- and state-dependent noise. In Section 4, we present some results on the standard and indefinite linear quadratic optimal control problem. Based on Section 3 and Section 4, the relationship between mean-field stochastic control and Nash equilibrium strategies is established in Section 5. It is shown that their equivalence relies on the relationship between the disturbance and the diffusion term. Section 6 proceeds with two examples to verify the correctness of the conclusions.
Notations: is the transpose of a vector Z or matrix Z; (); Z is a positive definite (positive semi-definite) symmetric matrix; is an n-dimensional real Euclidean space; means that A is an n-dimensional real symmetric matrix; is the space of nonanticipative stochastic processes with respect to an increasing -algebra satisfying ; ; and I is the identity matrix.
2. Preliminaries
Based on and performance functions, we introduce the definitions of the finite horizon mean-field stochastic control and the Nash equilibrium point of a two-person non-zero sum LQ game in this section. Furthermore, the relationship between mixed control and pure or control also is presented.
Consider the following MF-SDEs with ()-dependent noises:
where and are continuous matrix-valued functions of appropriate dimensions. and are the system state, external disturbance, control input and regulated output, respectively. is the expectation operator. Without loss of generality, we assume to be one-dimensional standard Brown motion defined on the filtered probability space with , where is a -field consisting of subsets of , and denotes a probability measure. is the initial state, which is assumed to be deterministic.
To better characterize mixed control and the Nash equilibrium point, for the given disturbance attenuation level , we define two associated performance indices of system (1) as follows:
Similar to the definition of mixed control of classic stochastic systems [5], mean-field stochastic control can be defined as follows.
Definition1.
Consider system (1); for a given , , search for a state feedback control of system (1) such that
(1) with
where is an operator associated with the realization
which is defined as
(2) When the worst case disturbance is applied to (1), minimizes the output energy
where
When exists, is called a pair of solution of the finite horizon mixed control of system (1).
Remark1.
If only satisfies Definition 1-(1) but does not necessarily satisfy Definitions 1-(2), then such a is called an control for system (1). is the performance function. According to Definition 1, can attenuate the effect of external disturbance ν on regulated output z to the given positive number λ, and means the output energy, which is the corresponding performance function.
Definition2
([2]). is called the Nash equilibrium point of the two-person non-zero sum LQ game corresponding to the cost functions and if for any
Remark2.
From the above Definitions 1 and 2, mixed control has close relation to the Nash equilibrium point. If is the Nash equilibrium point, is the worst-case disturbance; in this case, can not only minimize but also guarantee provided for . In what follows, our main results are the relationships between the solvability of the mean-field stochastic control with the existence of Nash equilibrium point of (3). In particular, the pure stochastic control problem only needs to solve
while the pure stochastic control only needs to solve
3. Finite Horizon Mean-Field SBRL
Mixed control is the combination of pure control and pure control. To study the mixed control problem, we first need to establish the finite time mean-field SBRL, which is the key to developing the pure control theory.
Consider the following MF-SDEs with state- and disturbance-dependent noises:
where and are continuous matrix-valued functions of appropriate dimensions. is the mathematical expectation, and are as in (1). Associated with system (4), the perturbation operator is defined as follows:
and
Taking the mathematical expectations in (4), we can obtain
and
where
For convenience, here and in what follows, we omit the time argument s of GDREs. When we write or , we mean .
The so-called finite time mean-field SBRL is presented as the following lemma, which characterizes the relationship between the solvability of generalized differential Riccati equations and the disturbance attenuation problem.
Lemma1.
(SBRL): For stochastic system (4), for some given , if and only if the following GDREs
have a unique solution, on , and .
Proof.
Using a similar approach to Theorem 3.1 of [31], we can obtain the sufficiency. Next, the necessity will be proved, i.e., implies the existence of the bounded solution on of (7). Otherwise, there exists a unique solution backwards in time on a maximal interval , where , becomes unbounded as , i.e., (7) shows the phenomenon of finite time escape, which will lead to a contradiction. For , , let
By the technique of completing squares together with It’s formula, it can be shown that
where
So
it shows that for any .
Next, it will be proved that for some and any . Let be the solution of
For clarity, denotes the solution of (4) when the initial state is , by linearity
where is the trajectory of the mean-field stochastic unperturbed system
and is the trajectory of system (4) with a zero initial state. It is easy to obtain that for ,
In consideration of (10) and (11), by applying It’s formula, we can obtain
Therefore, for . So cannot tend to ∞ as , implying that (7) has a unique solution on . The lemma is proved. □
Remark3.
Lemma 1 presents a sufficient and necessary condition of the effect of external disturbance on regulated output less than the given positive number λ, which is the key procedure in the characterization of mixed control (Definition 1).
4. Finite Horizon Mean-Field LQ Control
Some well-known results on standard and indefinite mean-field stochastic LQ controls are stated in this section, which play a central role in the study of mean-field stochastic control. We start with the definition of the pseudo matrix inverse.
Definition3
([32]). Given a matrix , the pseudoinverse (Moore–Penrose inverse) of W is the unique matrix such that
In particular, when , the Moore–Penrose inverse has the following properties:
Consider the following stochastic system of the mean-field type:
Under the constraint of (26), the linear quadratic performance is given as follows:
with and being suitable symmetric matrix-valued functions. The finite horizon mean-field stochastic LQ problem can be described as follows.
Problem (MF-LQ): For given , find such that
Any satisfying (28) is called the optimal control, and the state corresponding to is called the optimal trajectory.
When and are indefinite matrices, the above is indefinite LQ control, which is associated with the following GDRE:
Next, the well-known results on standard and indefinite mean-field stochastic LQ controls are stated as follows.
Lemma2
([24]). Let (A1) and (A2) hold, then (30) admits unique solutions . The unique optimal control law and the optimal cost value are respectively given by
and
Lemma3
([26]). Let (A1)–(A2) hold, and there is an optimal linear feedback to Problem (MF-LQ) if and only if GDRE (29) is regularly solvable. In this case,
and
where
Remark4.
Lemmas 2 and 3 present the conditions under which the optimal linear feedback control exists, as well as the form of the optimal cost value and the optimal feedback control. These two lemmas are the key to developing the control.
5. Mean-Field Stochastic Control and Nash Equilibrium Strategy
We first consider the following MF-SDE with only the x-dependent noise:
Taking the mathematical expectations in (33), we have
and
where
For system (33), a necessary and sufficient condition for the existence of two-person non-zero sum Nash equilibrium strategies is established, which is an extension of [6].
Theorem1.
For system (33), there exists linear memoryless state feedback Nash equilibrium strategies
and
i.e.,
and
if and only if the following coupled GDREs
and
have a solution on . If the solution of (38) and (39) exists, then
(i)
and
(ii)
(iii)
Proof.
Sufficiency: Applying It’s formula, under the constraint of (34) and (35), we have (with the time argument s suppressed)
and
In consideration of
by a series of simple computations and considering (38), it can be obtained that
where and are given by (40) and (41). The above equation easily yields that
Under the constraint of (47), to minimize is a standard mean-field stochastic LQ optimal problem. By Lemma 2, we can obtain that
has a unique solution with , which is the same as (39). Furthermore,
and
Substituting and into (45), (38) is obtained. The rest is to show , which can be seen from (46) and (36) that for any ,
The proof is complete. □
Remark5.
By Theorem 1, the existence of Nash equilibrium strategies is equivalent to the solvability of GDREs. Combined with Theorem 3.1 given in [31], we can get the following Theorem 2, which states the relationship between the solvability of mixed control of system (33) and the existence of Nash equilibrium strategies:
Theorem2.
The following are equivalent:
(i) There exists a Nash equilibrium strategy pair (, ) for (36) and (37).
(ii) The finite horizon control of system (33) has the solution () with
and
(iii) The coupled GDREs (38) and (39) have a solution on .
Proof.
By Theorem 1, (i)⟺(iii).
(i)⟹(ii): According to Theorem 1, (i) yields
According to Theorem 3.1 in [31], can be replaced by So (i)⟹(ii).
(ii)⟹(i): Keeping the definition of in mind, by Definition 1, (ii)⟹(i). To summarize, the proof is complete. □
Remark6.
According to Theorem 2, the existence of the Nash equilibrium strategy (36) and (37) is equivalent to the solvability of control of system (33) or the existence of solutions to coupled GDREs (38) and (39). There exist the same results for the following MF-SDEs with x- and u-dependent noises:
Theorem3.
The following are equivalent:
(i) There exists a Nash equilibrium strategy pair () for (36) and (37).
(ii) For system (49), corresponding finite horizon control has a solution () with
and
(iii) The following coupled GDREs
and
have a solution on . If the solution of GDREs (50) and (51) exists, then
(1)
and
(2)
(3)
Proof.
(Key sketch) For , we only need to note that GDRE (50) corresponds to indefinite LQ control problem
subject to
GDRE (51) corresponds to the standard LQ control problem
subject to the following system,
with Similar to Theorem 2, we can finish the rest of the proof. □
Remark7.
For systems (33) and (49), we have (i)⇔(ii)⇔(iii) in Theorems 2 and 3. However, it is not the case for system (1). It can be shown that, for (1), (i)⇔(iii), but (i) and (iii) are not equivalent to (ii).
For system (1), the solvability of mixed / control is presented as the following theorem in terms of GDREs. Lemma 1 plays an important role in proving the following theorem.
Theorem4.
The finite horizon / control of system (1) has a solution with
and
if and only if the following GDREs
and
have a solution on . If the solution of (56) and (57) exists, then
(1)
and
(2)
(3)
Proof.
Sufficiency: For , one needs to note that GDRE (56) corresponds to indefinite LQ control problem
subject to
By Lemma 3, for ,
Similarly, GDRE (57) corresponds to standard LQ control problem
subject to
For the LQ optimization (63) and (64), by Lemma 2, we have
The inequalities (62) and (65) show that is a two-person non-zero sum Nash equilibrium point. Similar to Theorem 2, we can obtain that , which imply that is the solution of mean-field stochastic control.
Necessity: Implement in (1), we can obtain (61). By Definition 1, . By Lemma 1, the GDRE (56) has a unique solution with on . Substituting into (1) yields (64). By Lemma 2, there exists a unique solution for (57) with . The proof is complete. □
Remark8.
According to Theorem 4, for system (1), the solvability of GDREs (56) and (57) is equivalent to the solvability of / control. However, it is not equivalent to the existence of Nash equilibrium strategies, which is stated by the following Theorem 5.
Theorem5.
For system (1), there exists a Nash equilibrium strategy pair () for (36) and (37) if and only if the following GDREs
and
have a solution on .
Proof.
Sufficiency: By Lemma 3, if (66) has a solution , then is the solution of the mean-field stochastic LQ control (60) and (61). Therefore, we can obtain Nash inequality (36). In addition, by Lemma 2, is an optimal control for the standard mean-field LQ (63) and (64). Hence, Nash inequality (37) is obtained. The sufficiency is proved.
Lemmas 2 and 3 can lead to the necessity. □
Remark9.
Obviously, when and , then GDREs (66) and (67) reduce to GDREs (56) and (57).
Remark10.
From Theorems 4 and 5, we know that, different from systems (33) and (49), the solvability of the mean-field stochastic / control is not equivalent to the existence of Nash equilibrium strategies for system (1). The reason is that the external disturbance enters into the diffusion term. When the diffusion term contains external disturbance, Lemma 1 can guarantee the condition and for / control, which is not satisfied for Nash equilibrium strategies. It also can be seen that when enters into the diffusion term, is not equivalent to .
Repeating the same steps as above, we can even present similar results for the mixed / control of the following more general mean-field stochastic system with x-, u- and -dependent noises
Theorem6.
For system (68), its finite horizon / control has a solution with
and
if and only if the following coupled GDREs
and
have a solution on .
Remark11.
Based on the above results, we can obtain that the existence of Nash equilibrium strategies is equivalent to the solvability of mean-field stochastic / control for continuous-time mean-field stochastic systems with state- and control-dependent noise. However, these two problems are not equivalent for continuous-time mean-field stochastic systems with state-, disturbance- and control-dependent noise. We can assert that the equivalence of these two problems is determined by whether the external disturbance enters into the diffusion term or not.
Remark12.
By comparing the corresponding conclusions of classic stochastic systems and stochastic Markov jump systems, we conjecture that the equivalence of these two problems is also correct for mean-field stochastic systems with Markov jump parameters, which is more complex and deserves further study.
6. Examples
In this section, a numerical experiment is given to demonstrate the effectiveness of the presented calculation approach of GDREs (38) and (39) in Theorem 2. Here, the obtained GDREs are viewed as a set of backward differential equations with known terminal conditions, which can be solved by the Runge–Kutta method.
Example1.
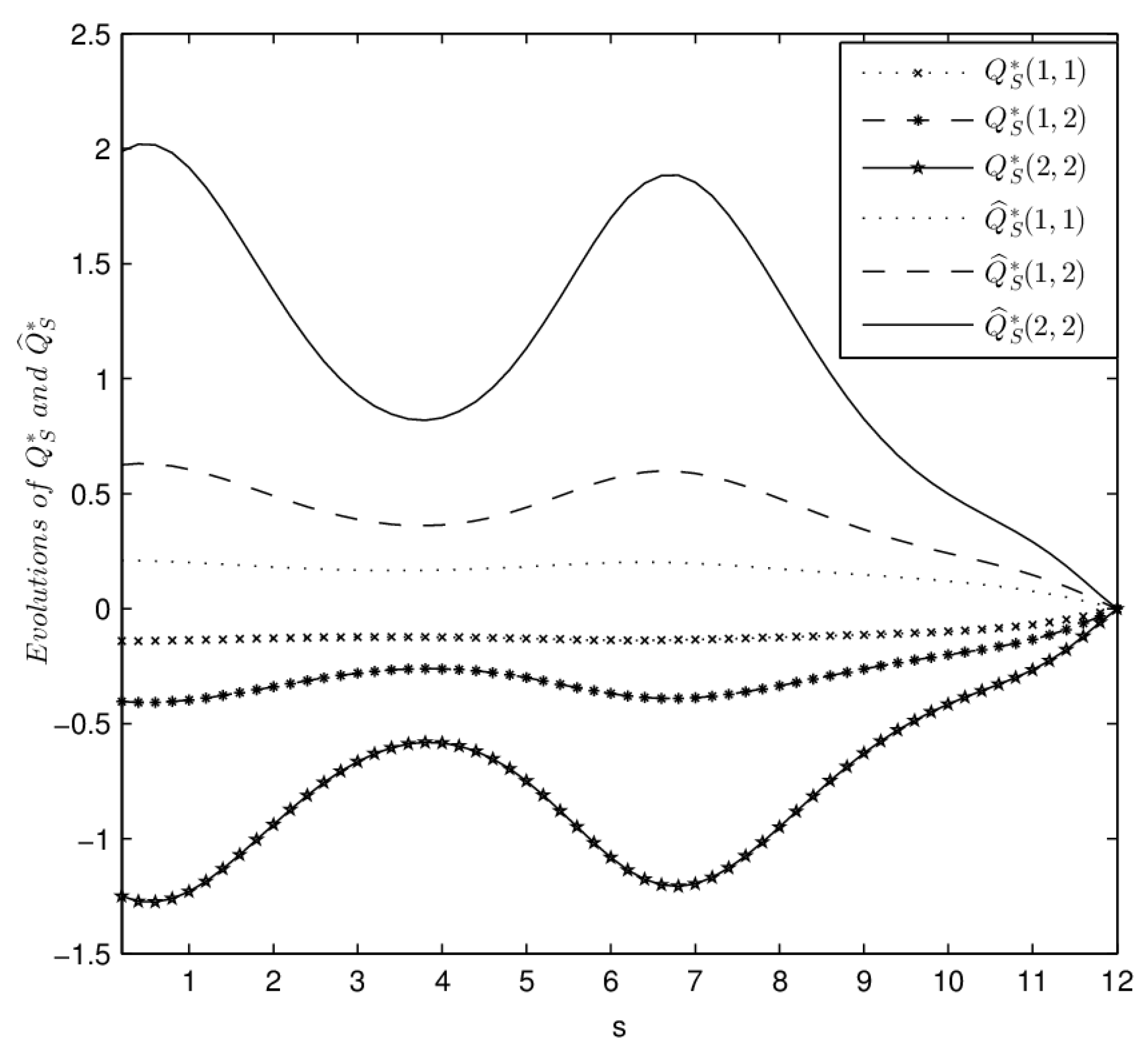
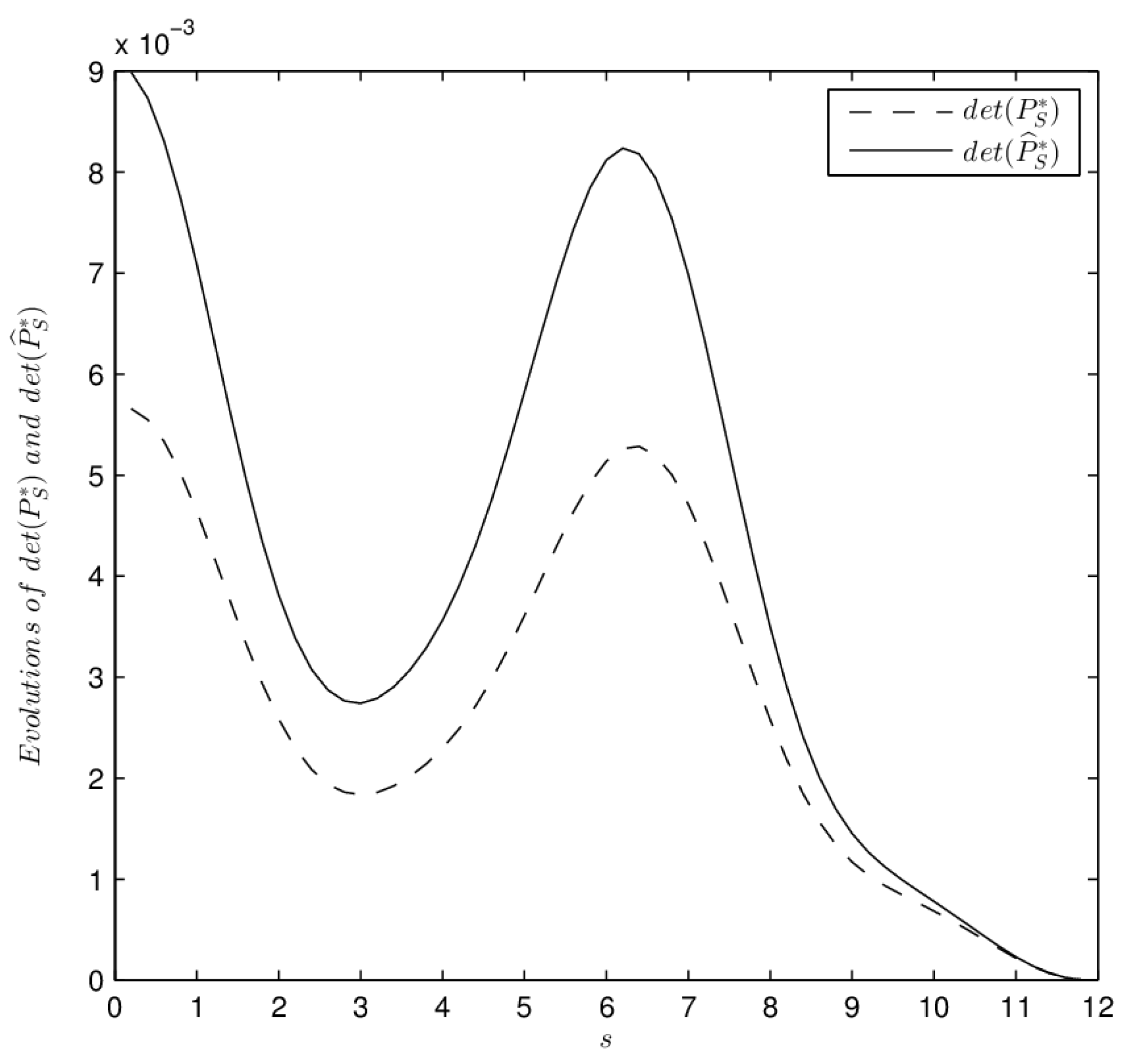
Consider a two-dimensional case of system (33), and the corresponding coefficients are given as follows:
Setting using the standard Runge–Kutta algorithm, we can obtain the solution of (38) and (39), with on , which is given as follows:
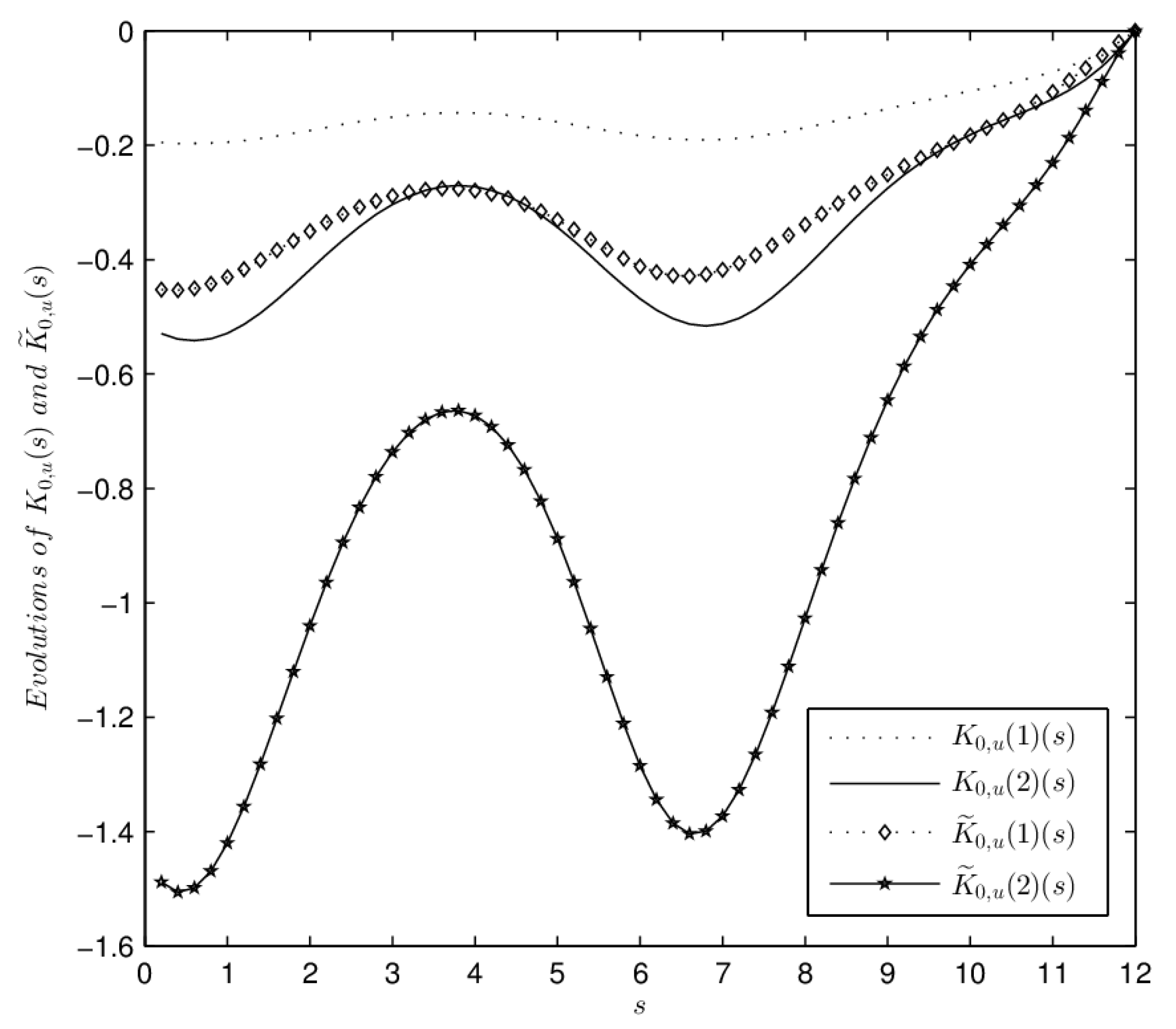
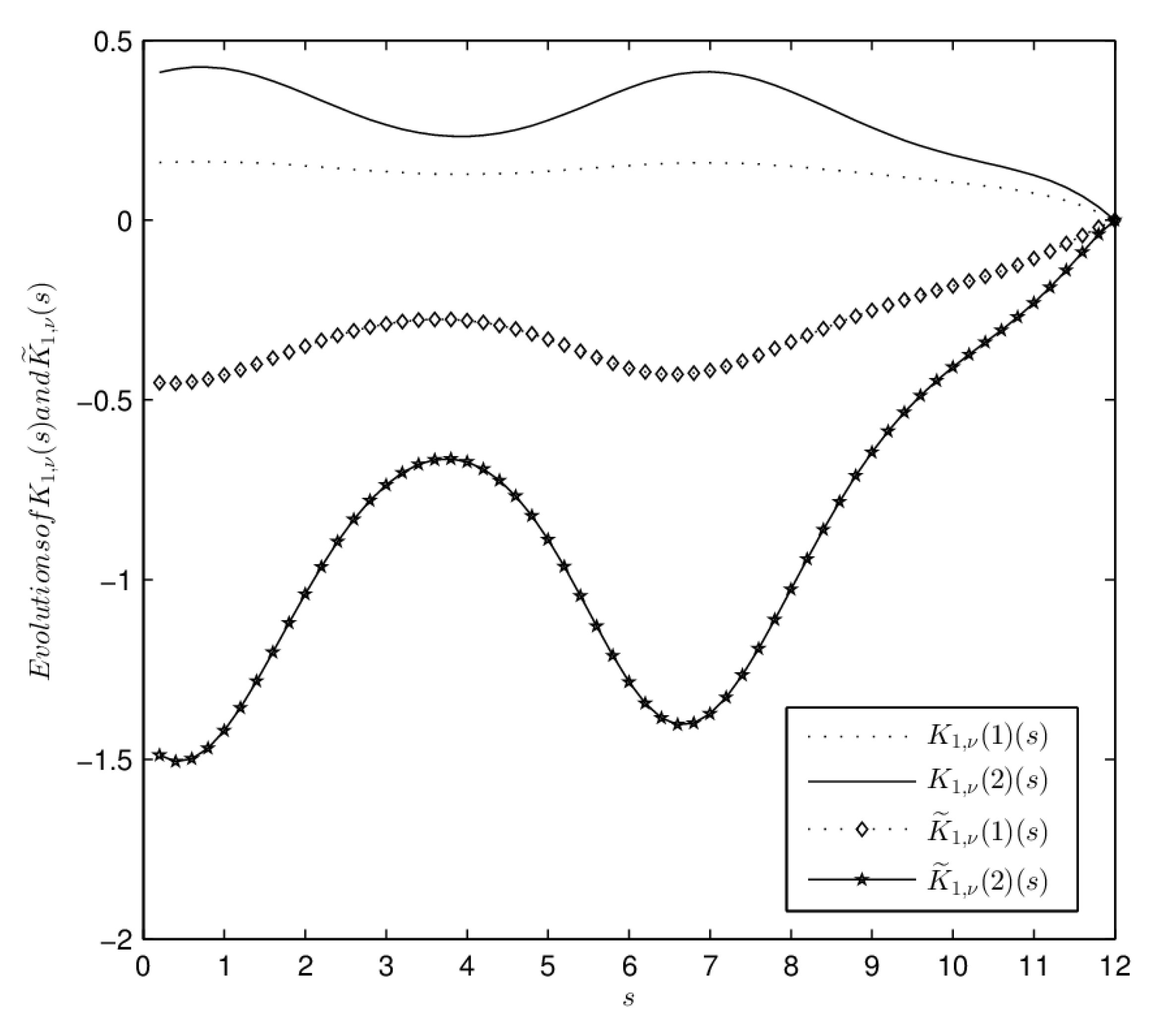
Figure 1, Figure 2, Figure 3 and Figure 4 present the evolutions of , which present the convergence of the solution of (38) and (39). From Figure 1 and Figure 3, it seems that and , which cannot be proved at the present stage. According to Theorem 2, the control of system (33) has a solution with
and Figure 5 and Figure 6 show their evolutions. By Theorem 2, we also can obtain that (, ) is exactly the Nash equilibrium strategy pair, which satisfies
and
7. Conclusions
In this paper, we discussed the relationship between the solvability of control and the existence of a Nash equilibrium strategy pair for continuous-time mean-field stochastic systems. For mean-field stochastic systems with disturbance-dependent noises, the SBRL was presented to characterize the necessary and sufficient condition of the solvability of in the form of GDREs. Based on It’s formula and mean-field stochastic LQ problem, it was revealed that the existence of Nash equilibrium strategies is equivalent to the solvability of GDREs for MF-SDEs with control- and state-dependent noises. It was also shown that their equivalence depends upon whether the MF-SDEs is a stochastic system with disturbance-dependent noises or not. For the finite-horizon control of more general mean-field stochastic systems with disturbance-dependent noises, based on mean-field SBRL and mean-field LQ control, some sufficient and necessary conditions were also presented in the form of GDREs, which can be solved with the Runge–Kutta algorithm.
Author Contributions
Conceptualization, L.M. and W.Z.; Methodology, L.M.; Software, Z.L.; Formal analysis, L.M.; Investigation, L.M.; Writing—original draft, L.M.; Writing—review & editing, L.M.; Project administration, W.Z. and Z.L.; Funding acquisition, W.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by National Natural Science Foundation of China grant number 62373229, Advanced Talents Foundation of QAU, 6631120057, Crosswise tasks, No 20230081.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
Khargonekar, P.; Rotea, M. Mixed H2/H∞ control: A convex optimization approach. IEEE Trans. Autom. Control1991, 36, 824–837. [Google Scholar] [CrossRef]
Limebeer, D.; Anderson, B.; Hendel, B. A nash game approach to mixed H2/H∞ control. IEEE Trans. Autom. Control1994, 39, 69–82. [Google Scholar] [CrossRef]
Hinrichsen, D.; Pritchard, A. Stochastic H∞. SIAM J. Control Optim.1998, 36, 1504–1538. [Google Scholar] [CrossRef]
EL Bouhtouri, A.; Hinrichsen, D.; Pritchard, A. H∞-type control for discrete-time stochastic systems. Int. J. Robust Nonlinear Control1999, 9, 923–948. [Google Scholar] [CrossRef]
Chen, B.; Zhang, W. Stochastic H2/H∞ control with state-dependent noise. IEEE Trans. Autom. Control2004, 49, 45–57. [Google Scholar] [CrossRef]
Zhang, W.; Xie, L.; Chen, B. Stochastic H2/H∞ Control: A Nash Game Approach; CRC Press: London, UK, 2017. [Google Scholar]
Sheng, L.; Zhang, W.; Gao, M. Relationship between Nash equilibrium strategies and H2/H∞ control of stochastic Markov jump systems with multiplicative noise. IEEE Trans. Autom. Control2014, 59, 2592–2597. [Google Scholar] [CrossRef]
Mei, W.; Zhao, C.; Ogura, M.; Sugimoto, K. Mixed H2/H∞ control of delayed Markov jump linear systems. IET Control Theory Appl.2020, 14, 2076–2083. [Google Scholar] [CrossRef]
Gao, M.; Zhao, J.; Sun, W. Stochastic H2/H∞ control for discrete-time mean-field systems with Poisson jump. J. Franklin. Inst.2021, 358, 2933–2947. [Google Scholar] [CrossRef]
Wu, C.; Hsu, C.; Hwang, C. Multiobjective H2/H∞ control design for nonlinear stochastic chaotic systems via a front-squeezing LMIs-constrained MOEA. Int. J. Fuzzy Syst.2021, 23, 2371–2383. [Google Scholar] [CrossRef]
Ming, Z.; Zhang, H.; Tong, X.; Yan, Y. Mixed H2/H∞ control with dynamic event-triggered mechanism for partially unknown nonlinear stochastic systems. IEEE Trans. Autom. Sci. Eng.2023, 20, 1934–1944. [Google Scholar] [CrossRef]
Abdullah, A.; Borham, N. Mixed H2/H∞ model reference control of linear parameter-varying discrete-time systems with real-time application to aeropendulum system. Int. J. Robust Nonlinear Control2022, 32, 9920–9938. [Google Scholar] [CrossRef]
Alsaade, F.; Jahanshahi, H.; Yao, Q.; Al-zahrani, M.; Alzahrani, A. A new neural network-based optimal mixed H2/H∞ control for a modified unmanned aerial vehicle subject to control input constraints. Adv. Space Res.2022, 71, 3631–3643. [Google Scholar] [CrossRef]
Kennouche, A.; Saifia, D.; Chadli, M.; Labiod, S. Multi-objective H2/H∞ saturated non-PDC static output feedback control for path tracking of autonomous vehicle. Trans. Inst. Meas. Control2022, 44, 2235–2247. [Google Scholar] [CrossRef]
Schmied, R.; Colaneri, P. Mixed H2/H∞ control for automated highway driving. Mechatronics2019, 57, 63–72. [Google Scholar] [CrossRef]
Suman, G.; Guerrero, J.; Roy, O. Robust frequency control in interconnected microgrids: An H2/H∞ control approach. IEEE Syst. J.2022, 16, 2044–2055. [Google Scholar] [CrossRef]
Kac, M. Foundations of kinetic theory. In Proceedings of the Third Berkeley Symposium on Mathematical Statistics and Probability, Berkeley, CA, USA, 26–31 December 1954. [Google Scholar]
Chan, T. Dynamics of the McKean-Vlasov equations. Ann. Prob.1994, 22, 431–441. [Google Scholar] [CrossRef]
Lasry, J.; Lions, P. Mean-field games. Jpn. J. Math.2007, 2, 229–260. [Google Scholar] [CrossRef]
Buckdahn, R.; Li, J.; Peng, S. Mean-field backward stochastic differential equations and related partial differential equations. Stoch. Process. Appl.2009, 119, 3133–3154. [Google Scholar] [CrossRef]
Andersson, D.; Djehiche, B. A maximum principle for SDEs of mean-field type. Appl. Math. Optim.2011, 63, 341–356. [Google Scholar] [CrossRef]
Li, J. Stochastic maximum principle in the mean-field controls. Automatica2012, 48, 366–373. [Google Scholar] [CrossRef]
Yong, J. Linear-quadratic optimal control problems for mean-field stochastic differential equations. SIAM J. Control Optim.2013, 51, 2809–2838. [Google Scholar] [CrossRef]
Huang, J.; Li, X.; Yong, J. A linear-quadratic optimal control problem for mean-field stochastic differential equations in infinite horizon. Math. Control Relat. Fields2015, 5, 97–139. [Google Scholar] [CrossRef]
Li, X.; Sun, J.; Yong, J. Mean-field stochastic Linear quadratic optimal control problems: Closed-loop solvability. Probab. Uncertain. Quant. Risk2016, 1, 2. [Google Scholar] [CrossRef]
Ni, Y.; Li, X.; Zhang, J. Indefinite mean-field stochastic linear-quadratic optimal control: From finite horizon to infinite horizon. IEEE Trans. Autom. Control2016, 61, 3269–3284. [Google Scholar] [CrossRef]
Sun, J.; Yong, J. Linear-quadratic stochastic two-person nonzero-sum differential games: Open-loop and closed-loop Nash equilibria. Stoch. Process Appl.2019, 129, 381–418. [Google Scholar] [CrossRef]
Elliott, R.; Li, X.; Ni, Y. Discrete time mean-field stochastic linear-quadratic optimal control problems. Automatica2013, 49, 3222–3233. [Google Scholar] [CrossRef]
Ma, L.; Zhang, T.; Zhang, W.; Chen, B. Finite horizon mean-field stochastic H2/H∞ control for continuous-time systems with (x,ν)-dependent noise. J. Frankl. Inst.2015, 352, 5393–5414. [Google Scholar] [CrossRef]
Horn, R.; Johnson, C. Matrix Analysis; CU Press: Cambrige, UK, 1985. [Google Scholar]
Figure 1.
The trajectories of and .
Figure 1.
The trajectories of and .
Figure 2.
The trajectories of and .
Figure 2.
The trajectories of and .
Figure 3.
The trajectories of and .
Figure 3.
The trajectories of and .
Figure 4.
The trajectories of and .
Figure 4.
The trajectories of and .
Figure 5.
The trajectory of .
Figure 5.
The trajectory of .
Figure 6.
The trajectory of .
Figure 6.
The trajectory of .
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
Ma, L.; Zhang, W.; Liu, Z.
Relationship between Nash Equilibrium Strategies and H2/H∞ Control of Mean-Field Stochastic Differential Equations with Multiplicative Noise. Processes2023, 11, 3154.
https://doi.org/10.3390/pr11113154
AMA Style
Ma L, Zhang W, Liu Z.
Relationship between Nash Equilibrium Strategies and H2/H∞ Control of Mean-Field Stochastic Differential Equations with Multiplicative Noise. Processes. 2023; 11(11):3154.
https://doi.org/10.3390/pr11113154
Chicago/Turabian Style
Ma, Limin, Weihai Zhang, and Zhenbin Liu.
2023. "Relationship between Nash Equilibrium Strategies and H2/H∞ Control of Mean-Field Stochastic Differential Equations with Multiplicative Noise" Processes 11, no. 11: 3154.
https://doi.org/10.3390/pr11113154
APA Style
Ma, L., Zhang, W., & Liu, Z.
(2023). Relationship between Nash Equilibrium Strategies and H2/H∞ Control of Mean-Field Stochastic Differential Equations with Multiplicative Noise. Processes, 11(11), 3154.
https://doi.org/10.3390/pr11113154
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.
Article Metrics
No
No
Article Access Statistics
For more information on the journal statistics, click here.
Multiple requests from the same IP address are counted as one view.
Ma, L.; Zhang, W.; Liu, Z.
Relationship between Nash Equilibrium Strategies and H2/H∞ Control of Mean-Field Stochastic Differential Equations with Multiplicative Noise. Processes2023, 11, 3154.
https://doi.org/10.3390/pr11113154
AMA Style
Ma L, Zhang W, Liu Z.
Relationship between Nash Equilibrium Strategies and H2/H∞ Control of Mean-Field Stochastic Differential Equations with Multiplicative Noise. Processes. 2023; 11(11):3154.
https://doi.org/10.3390/pr11113154
Chicago/Turabian Style
Ma, Limin, Weihai Zhang, and Zhenbin Liu.
2023. "Relationship between Nash Equilibrium Strategies and H2/H∞ Control of Mean-Field Stochastic Differential Equations with Multiplicative Noise" Processes 11, no. 11: 3154.
https://doi.org/10.3390/pr11113154
APA Style
Ma, L., Zhang, W., & Liu, Z.
(2023). Relationship between Nash Equilibrium Strategies and H2/H∞ Control of Mean-Field Stochastic Differential Equations with Multiplicative Noise. Processes, 11(11), 3154.
https://doi.org/10.3390/pr11113154
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}