

Optimizing and Analyzing Performance of Motor Fault Diagnosis Algorithms for Autonomous Vehicles via Cross-Domain Data Fusion

Abstract
:1. Introduction
2. Basic Principles
2.1. Gramian Angular Summation Fields
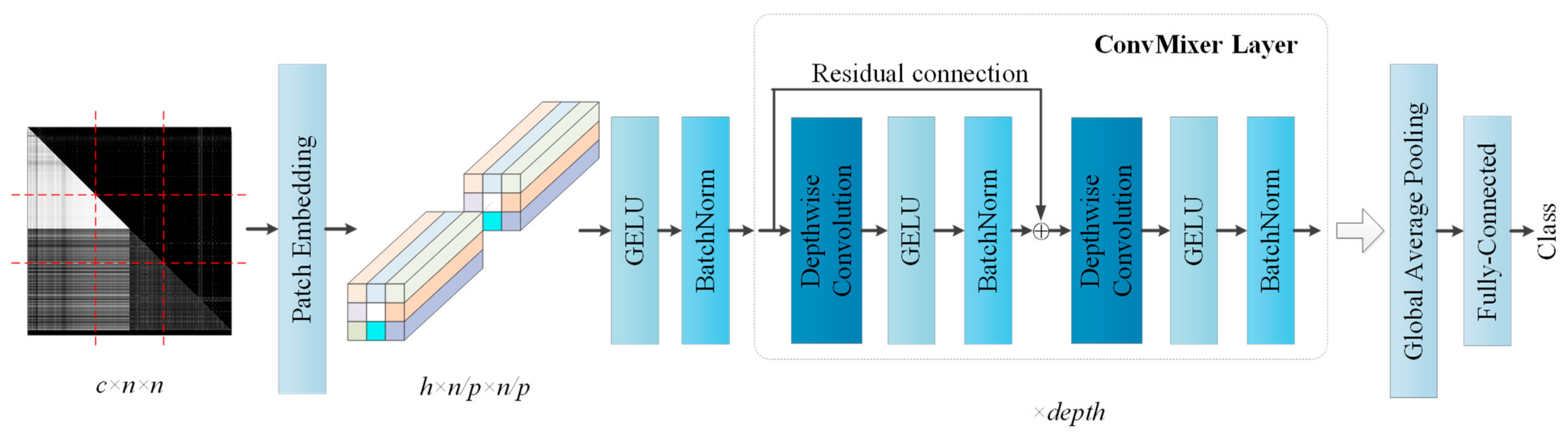
2.2. ConvMixer Model
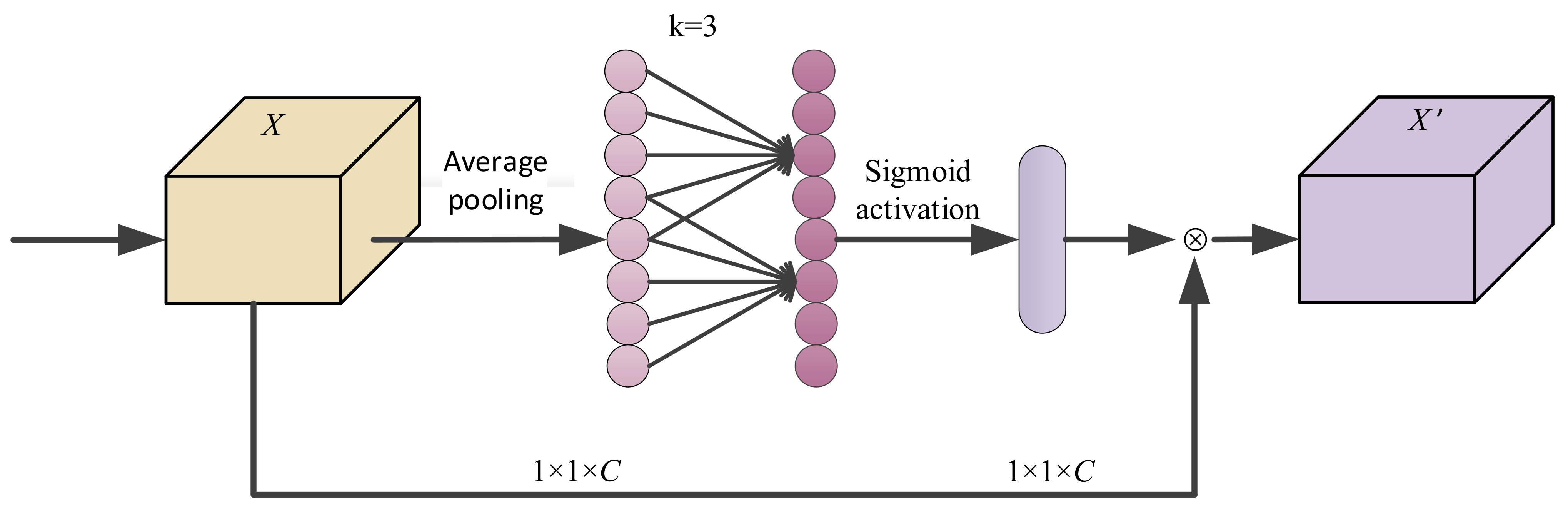
2.3. Efficient Channel Attention
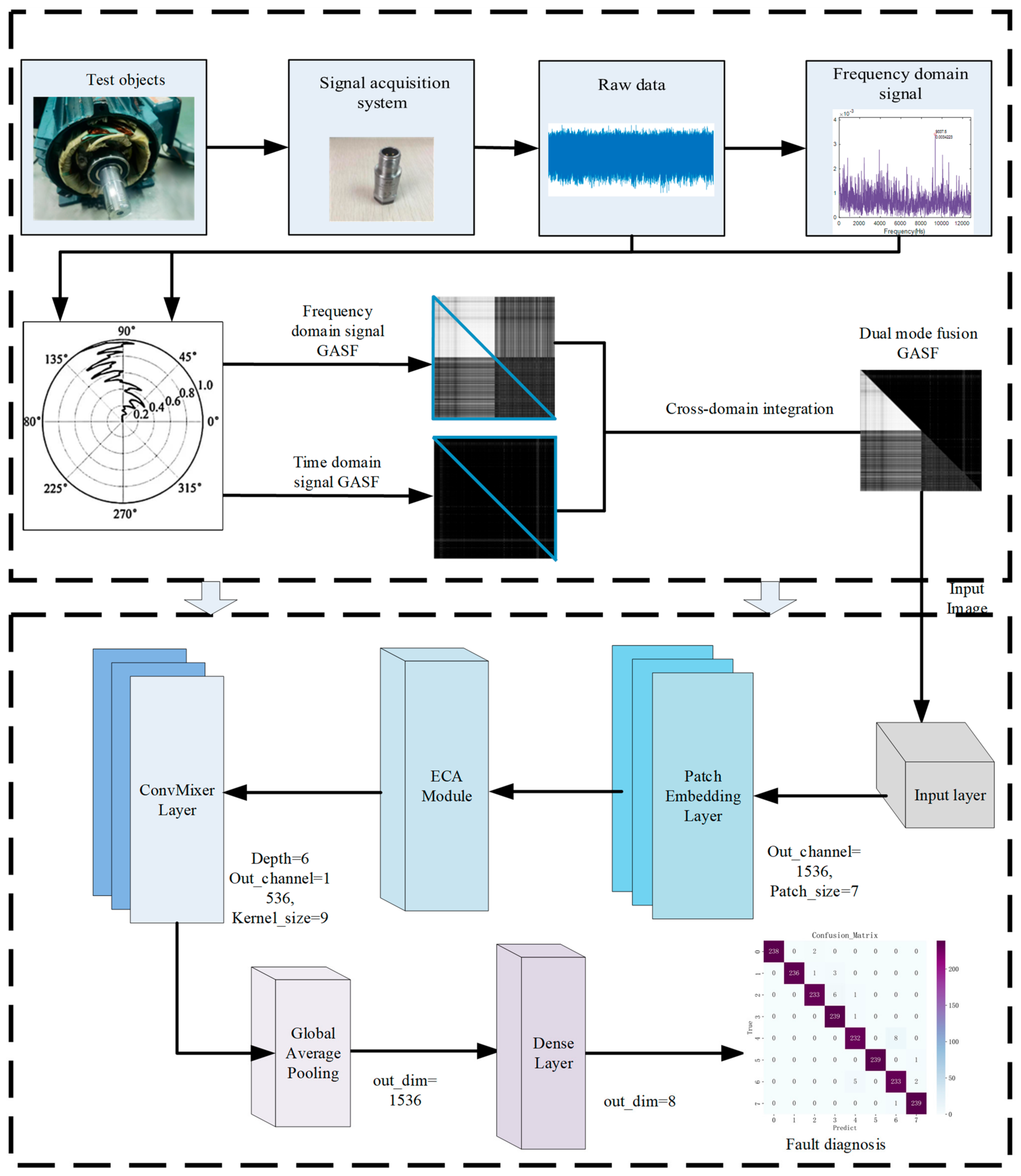
3. Optimized Algorithm for Motor Fault Diagnosis in Autonomous Driving Vehicles Based on Multi-Domain Data Fusion
3.1. Integration of Time-Domain and Frequency-Domain Data Fusion
3.1.1. Application of Fast Fourier Transform to Frequency Domain Data
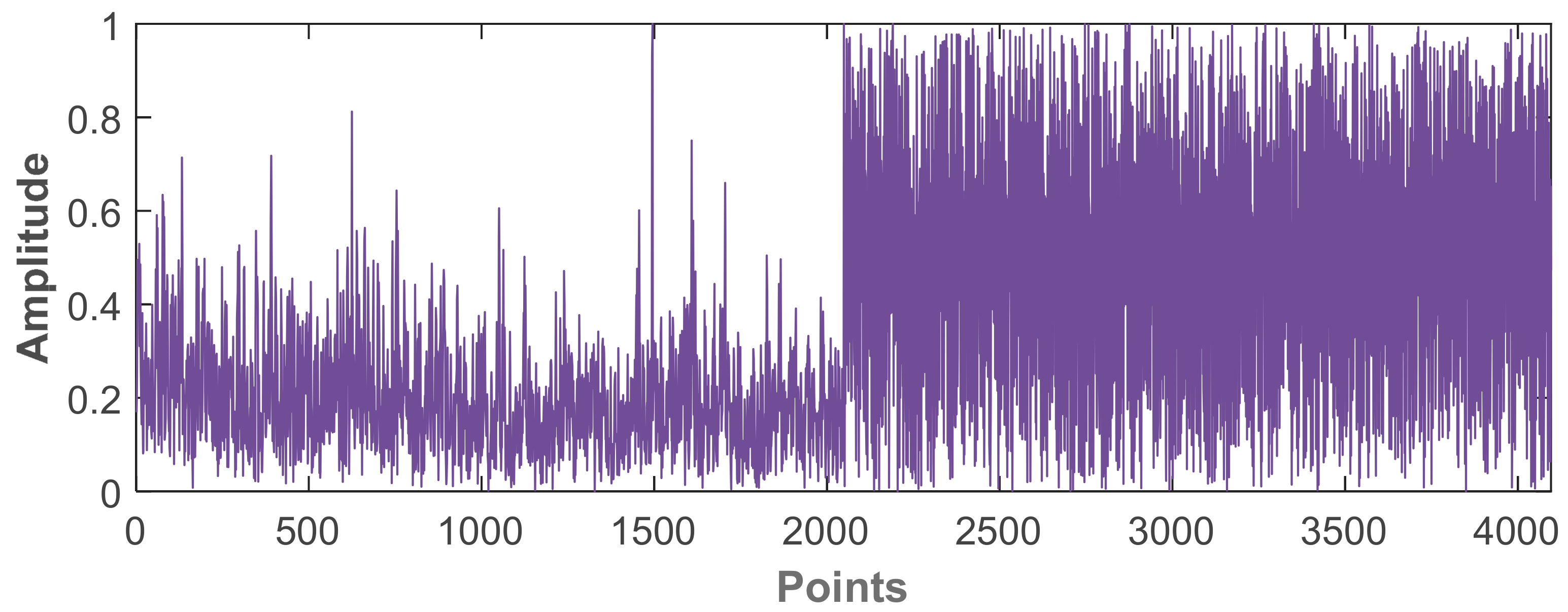
3.1.2. Fusion of Time-Domain and Frequency-Domain Information Using Gram Map Encoding
3.2. ECA-ConvMixer Model
4. Motor Fault Diagnosis Experiment and Analysis
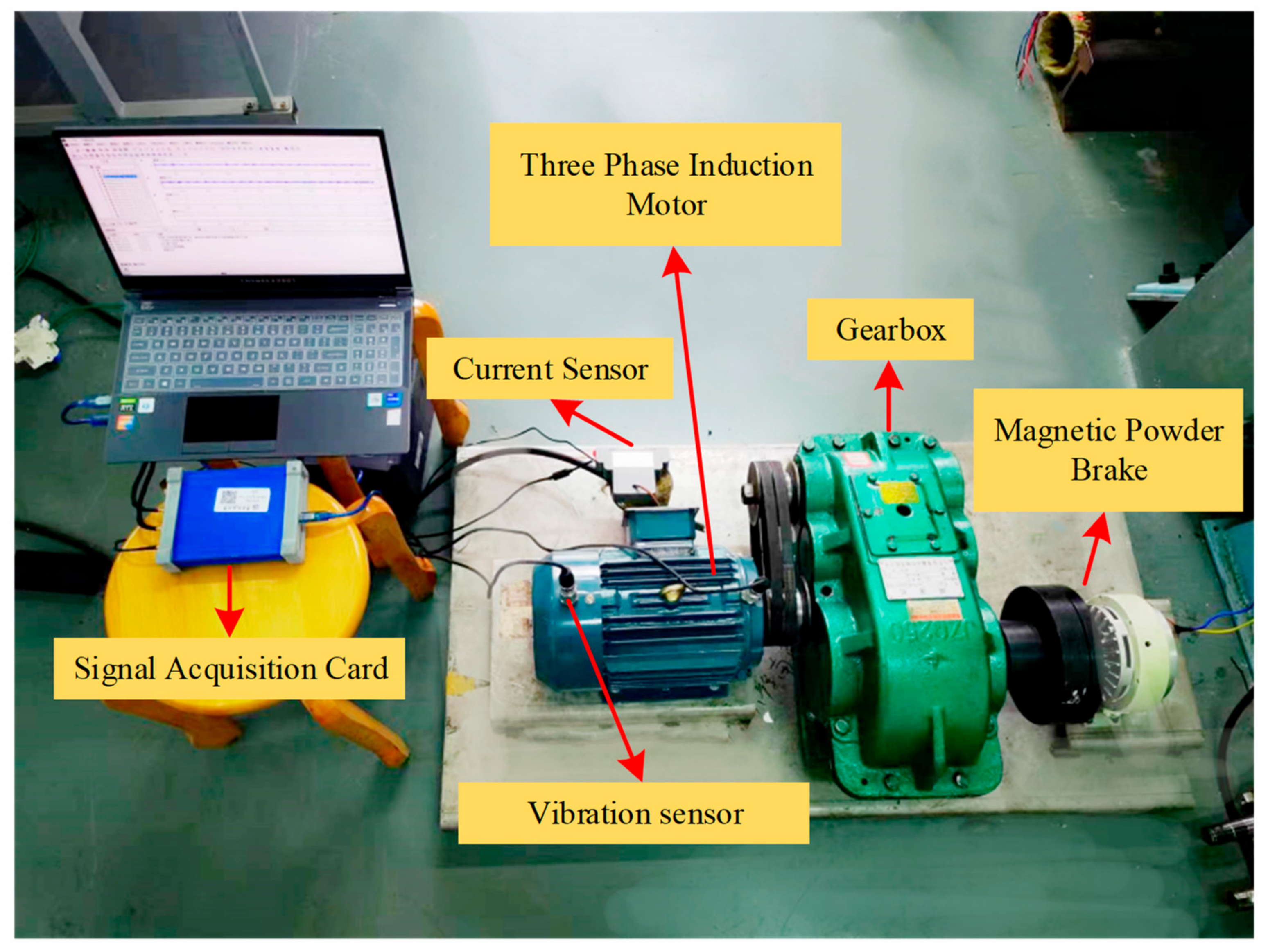
4.1. Principles of Establishing an Experimental Platform for Autonomous Vehicle Fault Diagnosis
4.2. Experimental Platform
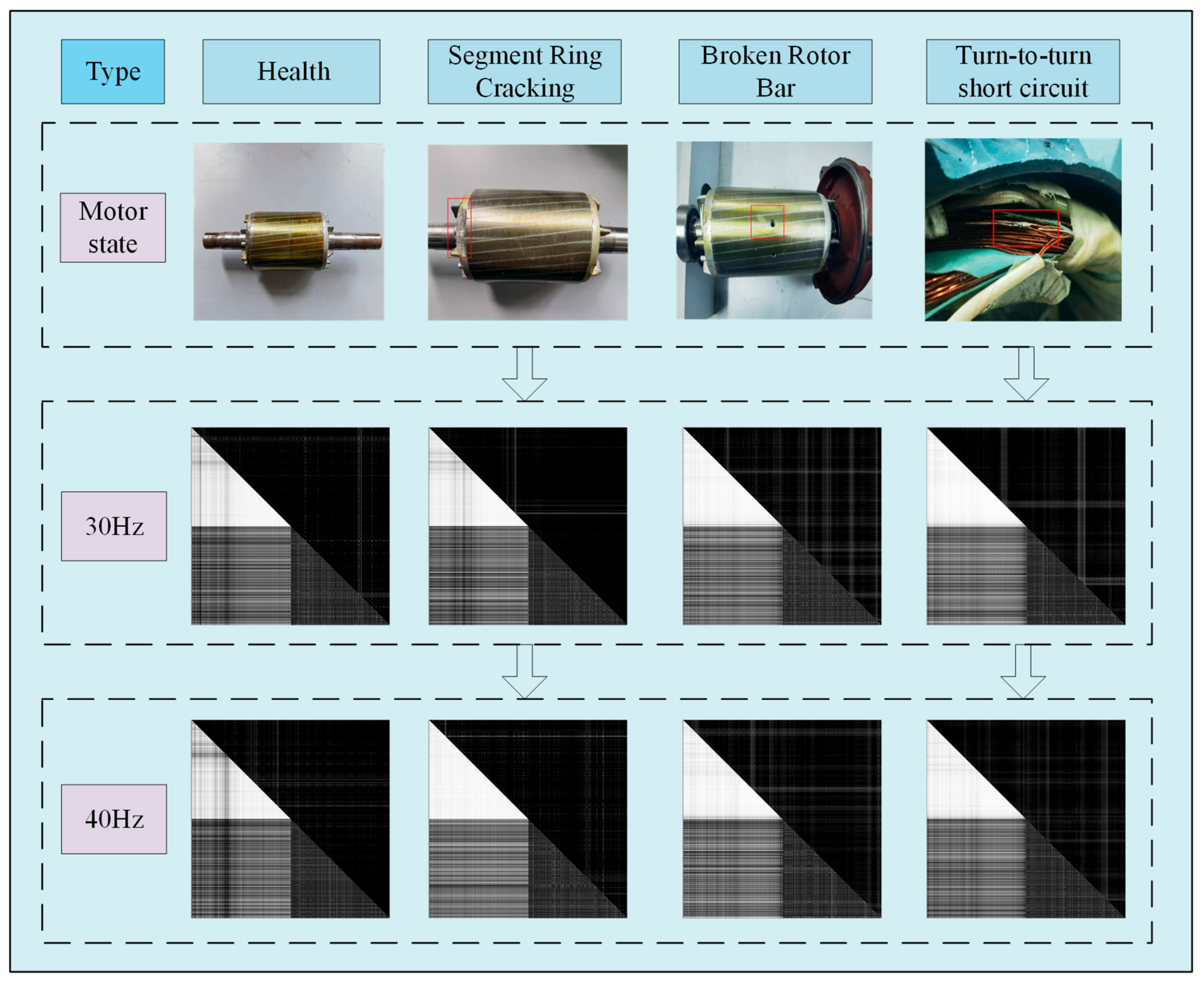
4.3. Experimental Data Description
4.4. Analysis of Performance for Multi-Domain Data Fusion Fault Diagnosis Algorithms
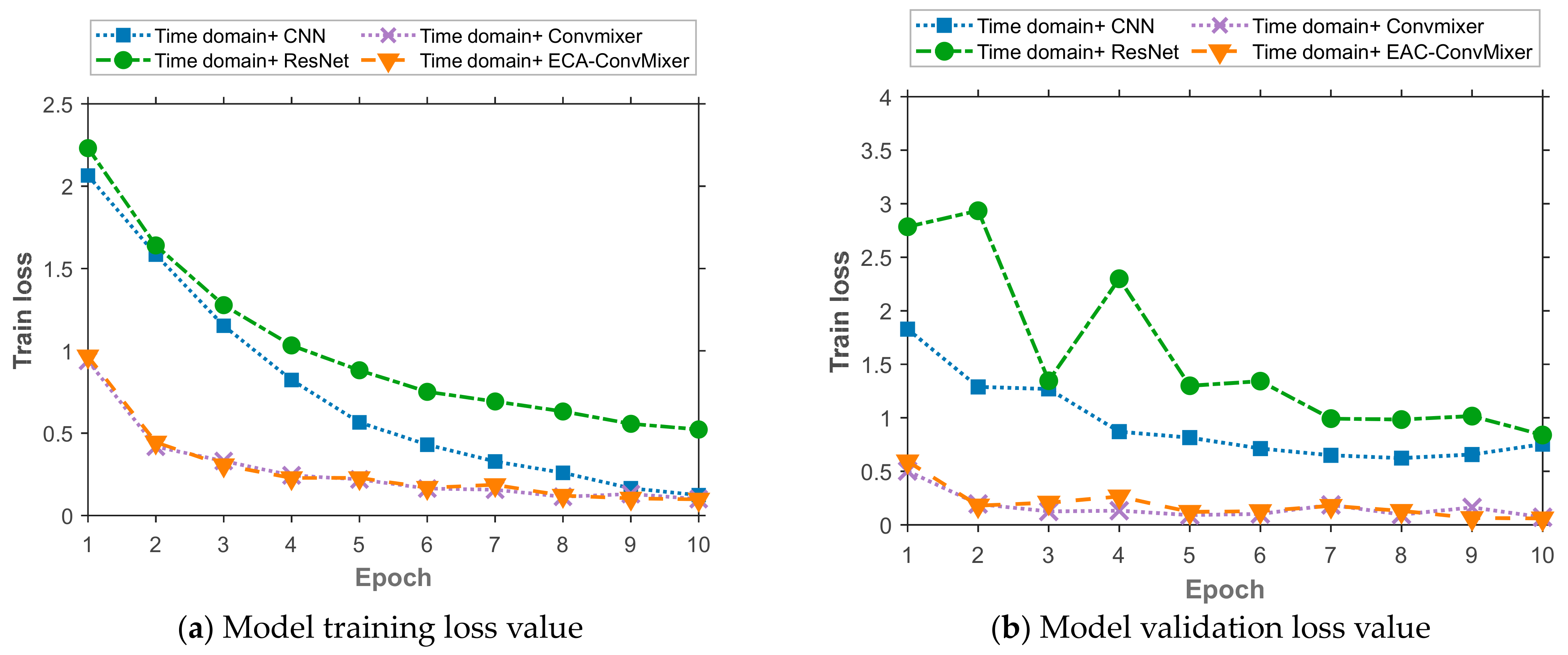
4.4.1. Analysis of Results from Various Deep Learning Models on Single-Domain Data
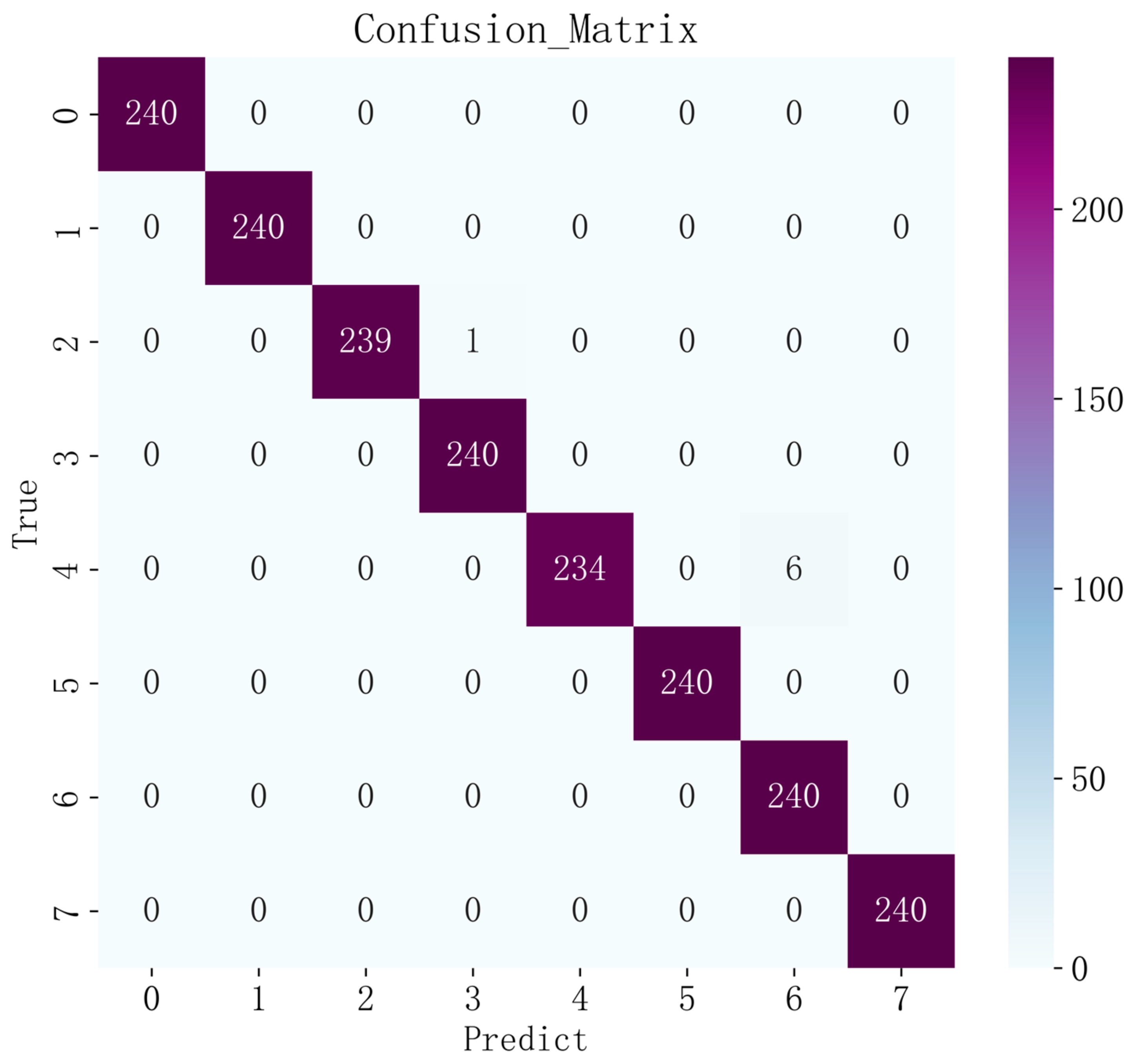
4.4.2. Analysis of Results from Cross-Domain Data
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Giannaros, A.; Karras, A.; Theodorakopoulos, L.; Karras, C.; Kranias, P.; Schizas, N.; Kalogeratos, G.; Tsolis, D. Autonomous Vehicles: Sophisticated Attacks, Safety Issues, Challenges, Open Topics, Blockchain, and Future Directions. J. Cybersecur. Priv. 2023, 3, 493–543. [Google Scholar] [CrossRef]
- Chand, S.; Li, Z.; Dixit, V.V.; Waller, S.T. Examining the macro-level factors affecting vehicle breakdown duration. Int. J. Transp. Sci. Technol. 2022, 11, 118–131. [Google Scholar] [CrossRef]
- Akin, B.; Ozturk, S.B.; Toliyat, H.A.; Rayner, M. DSP-based sensorless electric motor fault-diagnosis tools for electric and hybrid electric vehicle powertrain applications. IEEE Trans. Veh. Technol. 2009, 58, 2679–2688. [Google Scholar] [CrossRef]
- Wang, B.; Feng, X.; Wang, R. Open-Circuit Fault Diagnosis for Permanent Magnet Synchronous Motor Drives Based on Voltage Residual Analysis. Energies 2023, 16, 5722. [Google Scholar] [CrossRef]
- Song, Y.; Du, J.; Li, S.; Long, Y.; Liang, D.; Liu, Y.; Wang, Y. Multi-Scale Feature Fusion Convolutional Neural Networks for Fault Diagnosis of Electromechanical Actuator. Appl. Sci. 2023, 13, 8689. [Google Scholar] [CrossRef]
- Hong, J.; Wang, Z.; Qu, C.; Ma, F.; Xu, X.; Yang, J.; Zhang, J.; Zhou, Y.; Shan, T.; Hou, Y. Fault Prognosis and Isolation of Lithium-ion Batteries in Electric Vehicles Considering Real-Scenario Thermal Runaway Risks. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 11, 88–99. [Google Scholar] [CrossRef]
- Zhu, Z.; Lei, Y.; Qi, G.; Chai, Y.; Mazur, N.; An, Y.; Huang, X. A review of the application of deep learning in intelligent fault diagnosis of rotating machinery. Measurement 2022, 206, 112346. [Google Scholar] [CrossRef]
- Yang, T.; Li, G.; Wang, T.; Yuan, S.; Yang, X.; Yu, X.; Han, Q. A Novel 1D-Convolutional Spatial-Time Fusion Strategy for Data-Driven Fault Diagnosis of Aero-Hydraulic Pipeline Systems. Mathematics 2023, 11, 3113. [Google Scholar] [CrossRef]
- Gültekin, Ö.; Cinar, E.; Özkan, K.; Yazıcı, A. Real-Time Fault Detection and Condition Monitoring for Industrial Autonomous Transfer Vehicles Utilizing Edge Artificial Intelligence. Sensors 2022, 22, 3208. [Google Scholar] [CrossRef]
- Kaplan, H.; Tehrani, K.; Jamshidi, M. A Fault Diagnosis Design Based on Deep Learning Approach for Electric Vehicle Applications. Energies 2021, 14, 6599. [Google Scholar] [CrossRef]
- Shang, Y. Resilient Vector Consensus Over Random Dynamic Networks Under Mobile Malicious Attacks. Comput. J. 2023, bxad043. [Google Scholar] [CrossRef]
- Guo, M.H.; Xu, T.X.; Liu, J.J.; Liu, Z.N.; Jiang, P.T.; Mu, T.J.; Zhang, S.H.; Martin, R.R.; Cheng, M.M.; Hu, S.M. Attention mechanisms in computer vision: A survey. Comput. Vis. Media 2022, 8, 331–368. [Google Scholar] [CrossRef]
- Gonçalves, T.; Rio-Torto, I.; Teixeira, L.F.; Cardoso, J.S. A survey on attention mechanisms for medical applications: Are we moving towards better algorithms? IEEE Access 2022, 10, 98909–98935. [Google Scholar] [CrossRef]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-excitation networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; IEEE Computer Society Press: Los Alamitos, CA, USA, 2018; pp. 7132–7141. [Google Scholar]
- Wang, Y.; Ding, H.; Sun, X. Residual Life Prediction of Bearings Based on SENet-TCN and Transfer Learning. IEEE Access 2022, 10, 123007–123019. [Google Scholar] [CrossRef]
- Wang, Q.; Wu, B.; Zhu, P.; Li, P.; Zuo, W.; Hu, Q. ECA-Net: Efficient Channel Attention for Deep Convolutional Neural Networks. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 11531–11539. [Google Scholar]
- Xiang, X.; Ren, W.; Qiu, Y.; Zhang, K.; Lv, N. Multi-object tracking method based on efficient channel attention and switchable atrous convolution. Neural Process. Lett. 2021, 53, 2747–2763. [Google Scholar] [CrossRef]
- Liu, J.; Meng, S.; Zhou, X.; Gu, L. A Hydraulic Axial Piston Pump Fault Diagnosis Based on Instantaneous Angular Speed under Non-Stationary Conditions. Lubricants 2023, 11, 406. [Google Scholar] [CrossRef]
- Song, Y.; He, S.; Wang, L.; Zhou, Z.; He, Y.; Xiao, Y.; Zheng, Y.; Yan, Y. Anomaly Perception Method of Substation Scene Based on High-Resolution Network and Difficult Sample Mining. Sustainability 2023, 15, 13721. [Google Scholar] [CrossRef]
- Yahyaoui, Z.; Hajji, M.; Mansouri, M.; Bouzrara, K. One-Class Machine Learning Classifiers-Based Multivariate Feature Extraction for Grid-Connected PV Systems Monitoring under Irradiance Variations. Sustainability 2023, 15, 13758. [Google Scholar] [CrossRef]
- Pająk, M.; Kluczyk, M.; Muślewski, Ł.; Lisjak, D.; Kolar, D. Ship Diesel Engine Fault Diagnosis Using Data Science and Machine Learning. Electronics 2023, 12, 3860. [Google Scholar] [CrossRef]
- Trockman, A.; Kolter, J.Z. Patches are all you need? arXiv 2022, arXiv:2201.09792. [Google Scholar]
- Wang, Z.; Yan, W.; Oates, T. Time series classification from scratch with deep neural networks: A strong baseline. In Proceedings of the 2017 International Joint Conference on Neural Networks, Anchorage, AK, USA, 14–19 May 2017. [Google Scholar]
- Abdelrahman, A.; Viriri, S. FPN-SE-ResNet Model for Accurate Diagnosis of Kidney Tumors Using CT Images. Appl. Sci. 2023, 13, 9802. [Google Scholar] [CrossRef]
- Zhao, J.; Zhang, X.; Dong, H. Defect Detection in Transmission Line Based on Scale-Invariant Feature Pyramid Networks. Comput. Eng. Appl. 2022, 58, 289–296. [Google Scholar]
- “The Automated Driving Safety First” White Paper. Available online: https://apolloopen.bj.bcebos.com/docment/Safety_First_for_Automated_Driving_handover_to_PR_cn.pdf (accessed on 9 April 2023).
- Choudhary, A.; Fatima, S.; Panigrahi, B.K. State of the art technologies in fault diagnosis of electric vehicles: A component-based review. IEEE Trans. Transp. Electrif. 2022, 9, 2324–2347. [Google Scholar] [CrossRef]
- Model S Premium Electric Sedan. Available online: https://www.tesla.com/sites/default/files/tesla-model-s.pdf (accessed on 9 April 2023).
- Subsystem. Available online: https://www.tesla.cn/ownersmanual/models/zh_cn/GUID-E414862C-CFA1-4A0B-9548-BE21C32CAA58.html (accessed on 9 April 2023).
- Dulebenets, M.A. An Adaptive Polyploid Memetic Algorithm for scheduling trucks at a cross-docking terminal. Inf. Sci. 2021, 565, 390–421. [Google Scholar] [CrossRef]
- Pasha, J.; Nwodu, A.L.; Fathollahi-Fard, A.M.; Tian, G.; Li, Z.; Wang, H.; Dulebenets, M.A. Exact and metaheuristic algorithms for the vehicle routing problem with a factory-in-a-box in multi-objective settings. Adv. Eng. Inform. 2022, 52, 101623. [Google Scholar] [CrossRef]
- Singh, E.; Pillay, N. A study of ant-based pheromone spaces for generation constructive hyper-heuristics. Swarm Evol. Comput. 2022, 72, 101095. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Encoding | Category | Number of Training Sets | Number of Validation Sets | Number of Test Sets |
|---|---|---|---|---|
| 0 | End ring cracking 30 Hz | 400 × 1024 | 160 × 1024 | 240 × 1024 |
| 1 | End ring cracking 40 Hz | 400 × 1024 | 160 × 1024 | 240 × 1024 |
| 2 | Broken rotor bar 30 Hz | 400 × 1024 | 160 × 1024 | 240 × 1024 |
| 3 | Broken rotor bar 40 Hz | 400 × 1024 | 160 × 1024 | 240 × 1024 |
| 4 | Health 30 Hz | 400 × 1024 | 160 × 1024 | 240 × 1024 |
| 5 | Health 40 Hz | 400 × 1024 | 160 × 1024 | 240 × 1024 |
| 6 | Turn-to-turn short circuit 30 Hz | 400 × 1024 | 160 × 1024 | 240 × 1024 |
| 7 | Turn-to-turn short circuit 30 Hz | 400 × 1024 | 160 × 1024 | 240 × 1024 |
| Model | Time Domain Data Accuracy | Cross Domain Data Accuracy |
|---|---|---|
| CNN | 73.80% | 97.08% |
| ResNet | 76.30% | 97.55% |
| ConvMixer | 97.14% | 98.91% |
| ECA-ConvMixer | 98.39% | 99.68% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, F.; Li, G.; Fan, Q.; Xiao, Q.; Zhou, S. Optimizing and Analyzing Performance of Motor Fault Diagnosis Algorithms for Autonomous Vehicles via Cross-Domain Data Fusion. Processes 2023, 11, 2862. https://doi.org/10.3390/pr11102862
Xie F, Li G, Fan Q, Xiao Q, Zhou S. Optimizing and Analyzing Performance of Motor Fault Diagnosis Algorithms for Autonomous Vehicles via Cross-Domain Data Fusion. Processes. 2023; 11(10):2862. https://doi.org/10.3390/pr11102862
Chicago/Turabian StyleXie, Fengyun, Gang Li, Qiuyang Fan, Qian Xiao, and Shengtong Zhou. 2023. "Optimizing and Analyzing Performance of Motor Fault Diagnosis Algorithms for Autonomous Vehicles via Cross-Domain Data Fusion" Processes 11, no. 10: 2862. https://doi.org/10.3390/pr11102862
APA StyleXie, F., Li, G., Fan, Q., Xiao, Q., & Zhou, S. (2023). Optimizing and Analyzing Performance of Motor Fault Diagnosis Algorithms for Autonomous Vehicles via Cross-Domain Data Fusion. Processes, 11(10), 2862. https://doi.org/10.3390/pr11102862