




Voltage-Stabilizing Method of Permanent Magnet Generator for Agricultural Transport Vehicles

Abstract
:1. Introduction
2. Analysis of Advantages of Permanent Magnet Generator
2.1. Simple Structure and High Reliability
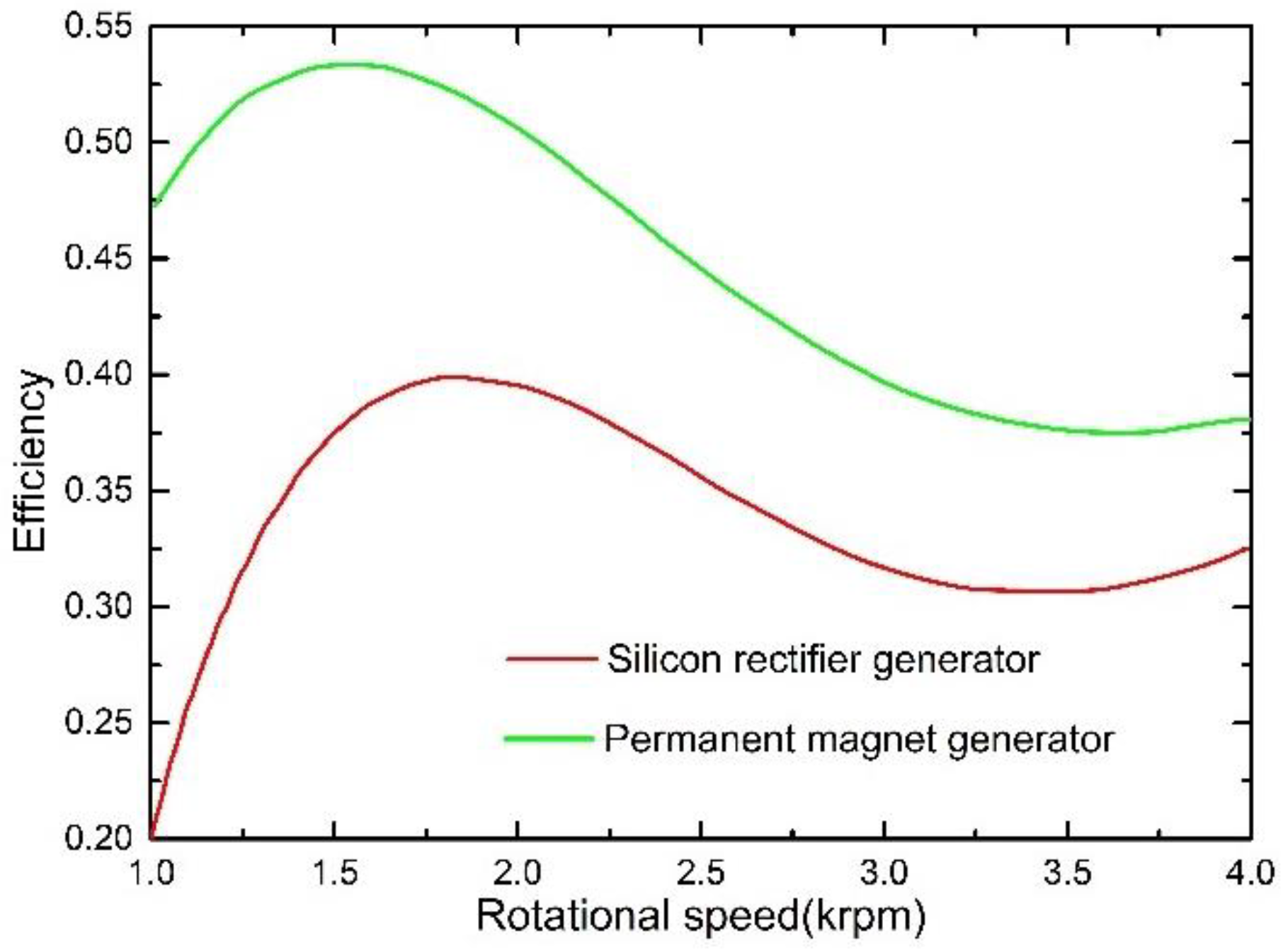
2.2. High Efficiency and Low Consumption of Electricity
2.3. Power Supply Performance Is Excellent at Low Speed, Output Voltage Adjustment Rate Is Low
2.4. Excellent Environmental Adaptability
2.5. Extended the Service Life of Battery
3. Mathematical Model Building in Synchronous Rotation Coordinate System
4. Analysis of Voltage-Stabilizing Principle
5. The Design of the Voltage-Stabilizing Circuit
5.1. Determination Parameters of Main Components in Circuit
5.1.1. Determination of Output Power of Generator
5.1.2. Determination of Speed Range
5.1.3. The Determination of the Stable Voltage Range
5.1.4. Main Electrical Components Parameters Calculation
5.2. Design of the Voltage-Stabilizing Circuit
6. Modeling and Simulation of Voltage-Stabilizing Circuit
6.1. Modeling of Voltage-Stabilizing Circuit
6.2. Simulation Analysis
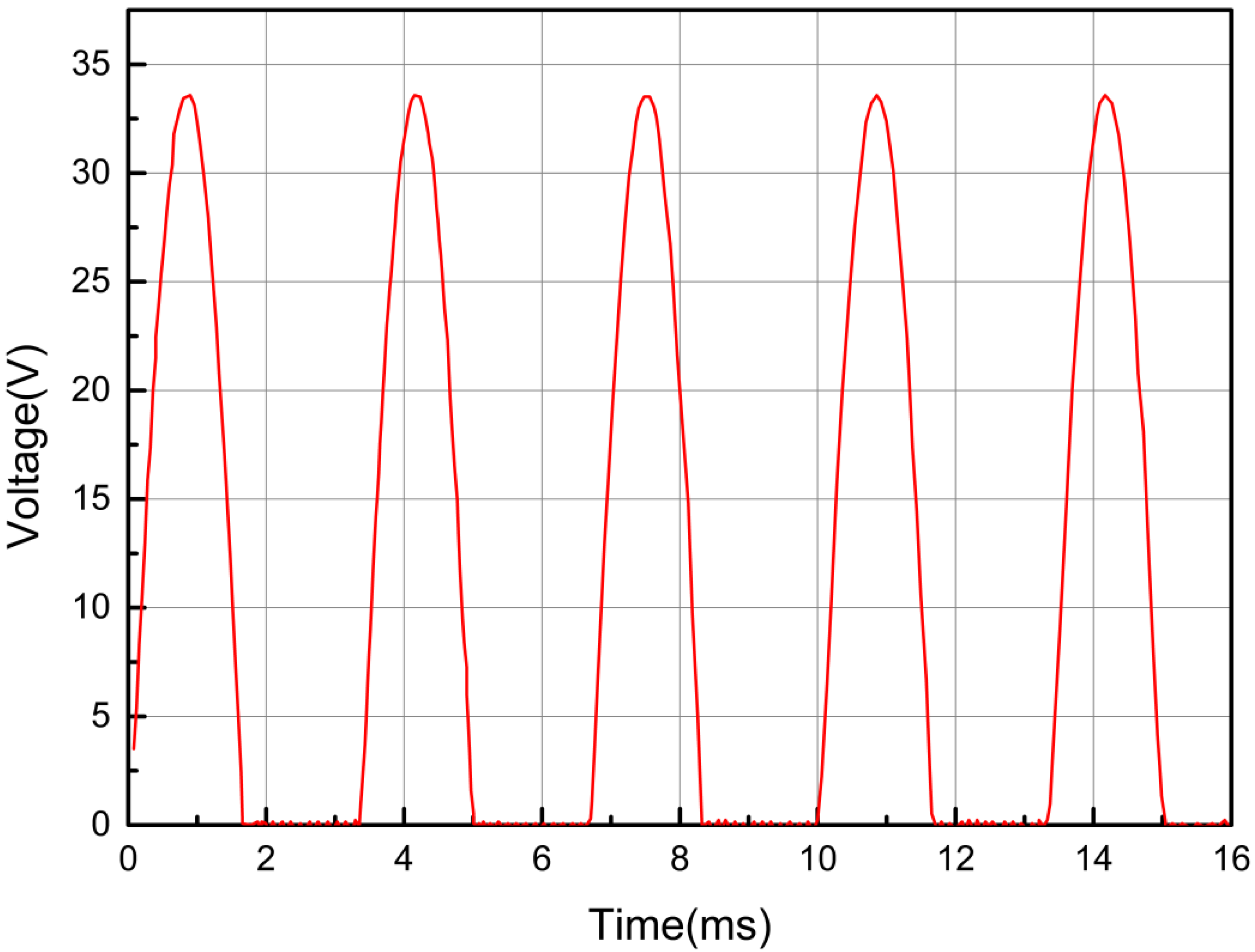
6.2.1. Simulation Analysis of Reference Point Voltage
6.2.2. Simulation Analysis of Output Voltage
6.2.3. Analysis and Calculation of Simulation Results
7. Performance Experiment
8. Conclusions
- (1)
- For design suitable for permanent magnet generator, mathematical model is built in synchronous rotation coordinate system, voltage-stabilizing principle is analyzed.
- (2)
- In order to verify the rationality of the voltage-stabilizing principle, combining with simulation analysis, theoretical calculation, and experimental verification, it is confirmed that the voltage-stabilizing principle of the voltage-stabilizing circuit is correct, the selected component parameters are reasonable, and the simulation results are accurate and reliable.
- (3)
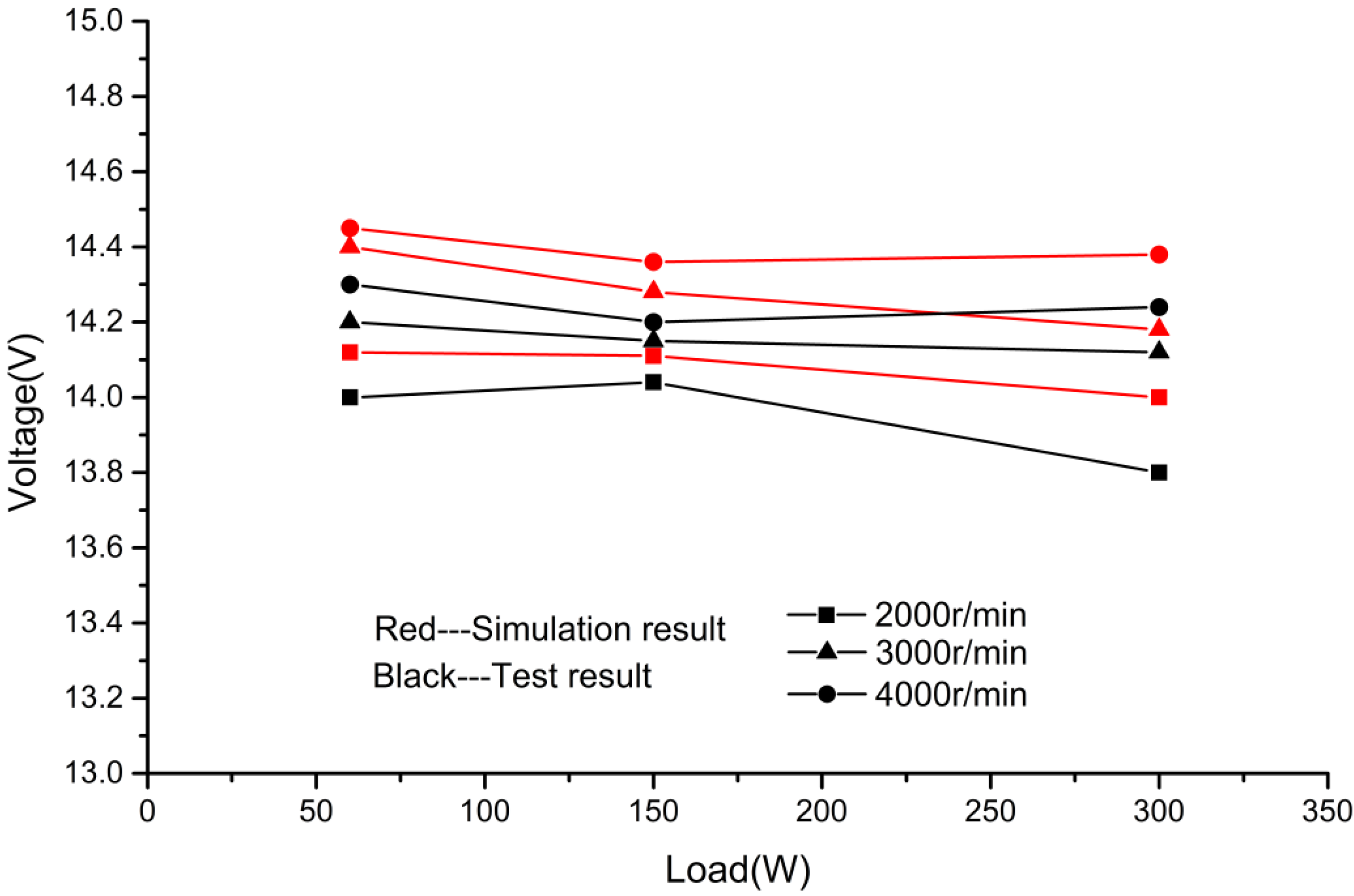
- The voltage-stabilizing controller designed is installed on the permanent magnet generator and experimented on the automotive electrical experimental platform. The output voltage is between 13.82 V and 14.40 V, which conforms to the mechanical industry standard GB/T23903-2009 of the People’s Republic of China. It is further proved that the voltage-stabilizing circuit has excellent voltage-stabilizing performance. By this way, the voltage-stabilizing circuit of permanent magnet generator for agricultural transport vehicles can be designed. It provides a convenient and reliable method for the design and manufacture of voltage-stabilizing circuit. The application of the voltage-stabilizing circuit greatly improves the performance of the electric system of the agricultural transport vehicles, reduces manufacturing cost and failure rate of the generator. The impact of COVID-19 pandemic and disruptions can be studied for transport vehicle energy management. In this regard, fuzzy, robust, and uncertain data can be predicted and optimized [37,38,39,40].
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Li, F.H. Overall design and analysis of agricultural transport vehicle. China South. Agric. Mach. 2017, 48, 47–49. [Google Scholar]
- Sun, Z.Y.; Wang, R.C.; Xia, C.G.; Meng, Z.H. Analysis of transient response characteristics of thermoelectric power system for agricultural transporter. J. Huazhong Univ. Sci. Technol. (Nat. Sci. Ed.) 2022, 50, 13–18. [Google Scholar]
- Zhang, R.; Xing, Z.C.; Wang, G.Y.; Ge, C.; Xu, L.; Qu, D. Electromechanical Inertia Coupling Compensation Mechanism of Agricultural Transport Vehicle Braking Performance Test Bench. Trans. Chin. Soc. Agric. Mach. 2021, 52, 526–532. [Google Scholar]
- Li, H.X.; Hu, Y.F. Application of Permanent Magnet Generator for Electric Vehicle. High Power Convert. Technol. 2014, 12, 35–40. [Google Scholar]
- Lu, G.; Li, S.J.; Zhang, H.N. Design of rare earth permanent magnet ISG motor. J. Northwestern Polytech. Univ. 2014, 22, 129–132. [Google Scholar]
- Espitia, H.; Machón, I.; López, H. Optimization of a fuzzy automatic voltage controller using real-time recurrent learning. Processes 2021, 9, 947. [Google Scholar]
- Alateeq, A.; Almalaq, Y.; Alateeq, A. Optimization of a multilevel inverter design used for photovoltaic systems under variable switching controllers. Processes 2022, 10, 1159. [Google Scholar]
- Chen, H.; Zhang, T.; Zhang, H.; Tian, G.; Liu, R.; Yang, J.; Zhang, Z. Drive System for Power-Carrying Vehicles Based on the Taguchi Method. Processes 2022, 10, 867. [Google Scholar]
- Miao, Q.; Fu, J.S.; Sun, Z.Q. Analysis and prospect of hybrid electric vehicle control strategy. Spec. Purp. Veh. 2022, 41, 17–19. [Google Scholar] [CrossRef]
- Zheng, Y.; Shi, Z.; Guo, D.; Dai, H.; Han, X. A simplification of the time-domain equivalent circuit model for lithium-ion batteries based on low-frequency electrochemical impedance spectra. J. Power Sources 2021, 489, 229505. [Google Scholar]
- Cao, Y.; Zhu, S.S.; Yu, J.Y.; Liu, C. Optimization design and performance evaluation of a hybrid excitation claw pole machine. Processes 2022, 10, 541. [Google Scholar] [CrossRef]
- Li, Y.; Yu, Z.; Meng, H.; Wang, J.; Jing, Y. Design and optimization of hybrid-excited claw-pole machine for vehicle. IEEE Trans. Appl. Supercond. 2021, 31, 99. [Google Scholar] [CrossRef]
- Javadi, S.; Mirsalim, M. Acoreless axial-flux permanent-magnet generator for automotive applications. IEEE Trans. Magn. 2015, 44, 14591–14598. [Google Scholar]
- Capponi, F.G.; Terrigi, R.; Caricchi, F.; Del Ferraro, L. Active output voltage regulation for an ironless axial-flux PM automotive alternator with electromechanical flux weakening. IEEE Trans. Ind. Appl. 2018, 45, 1785–1793. [Google Scholar] [CrossRef]
- Ren, D.M. Analysis and research on parameter design of permanent magnet drive generator for electric vehicle. Auto Time 2021, 16, 119–120, 124. [Google Scholar]
- Gong, J.P.; Zhang, J.; Feng, J.J.; Qu, H.; Luo, Z.W.; Fu, J.J. Study on output voltage control of permanent magnet synchronous generator set. Ind. Instrum. Autom. Equip. 2017, 12, 77–80. [Google Scholar]
- Chou, N.C.; Wang, J.J.; Wang, Q.G.; Wei, N.Q. Frequency domain harmonic model of electric vehicle charger using three phase uncontrolled rectifier. Trans. China Electrotech. Soc. 2016, 31, 156–162. [Google Scholar]
- Zhang, X.Y. Development of three-phase semi-controlled bridge rectifier regulator for permanent magnet generator. Electr. Mach. Control. Appl. 2006, 25, 59–60. [Google Scholar]
- Wei, H.; Yu, J.; Zhang, Y.; Ai, Q. High-speed control strategy for permanent magnet synchronous machines in electric vehicles drives: Analysis of dynamic torque response and instantaneous current compensation. Energy Rep. 2020, 6, 2324–2335. [Google Scholar] [CrossRef]
- Wang, Y.L.; Dou, M.F. Six-phase permanent magnet synchronous generator voltage regulator rectifier circuit simulation. Micromotors 2012, 45, 46–49. [Google Scholar]
- Shi, G.D.; Su, L.; Wang, H.Q.; He, J.Q.; Zhang, C.F. Zero-sequence current suppression strategy for six-phase PMSG system. Small Spec. Electr. Mach. 2022, 50, 53–57. [Google Scholar]
- Tian, G.; Liu, Y.; Ke, H.; Chu, J. Energy evaluation method and its optimization models for process planning with stochastic characteristics: A case study in disassembly decision-making. Comput. Ind. Eng. 2012, 63, 553–563. [Google Scholar] [CrossRef]
- Tounsi, K.; Djahbar, A.; Barkat, S. Sliding mode control of grid-connected wind energy system driven by 2 five-phase permanent magnet synchronous generators controlled by a new fifteen-switch converter. International Trans. Electr. Energy Syst. 2020, 30, 335–356. [Google Scholar]
- Khalil, T.; Mohamed, B.; Zhe, C. Optimal design of a multibrid permanent magnet generator for a tidal stream turbine. Energies 2020, 13, 158–186. [Google Scholar]
- Hedi, B.M.; Hechmi, B.A.; Mohamed, J. Experimental investigation of an open-switch fault diagnosis approach in the IGBT-based power converter connected to permanent magnet synchronous generator-DC system. Int. Trans. Electr. Energy Syst. 2020, 30, 79–92. [Google Scholar]
- Ke, H.; Liu, H.; Tian, G. An uncertain random programming model for project scheduling problem. Int. J. Intell. Syst. 2015, 30, 66–79. [Google Scholar] [CrossRef]
- Adem, D.; Mehmet, A. Comparison of 2D and 3D magnetic field analysis of single-phase shaded pole induction motors. Eng. Sci. Technol. 2016, 19, 1–7. [Google Scholar]
- Tian, G.; Liu, Y. Energy-Efficient Models of Sustainable Location for a Vehicle Inspection Station with Emission Constraints. IEEE Trans. Autom. Sci. Eng. 2015, 12, 238–243. [Google Scholar] [CrossRef]
- Mikołaj, O.; Jerzy, C. Numerical modelling of modular high-temperature gas-cooled reactors with thorium fuel. Nukleonika 2021, 66, 133–138. [Google Scholar]
- Mehran, M.B.; Hamed, M.; Mohammad, A.S. Control of a new stand-alone wind turbine-based variable speed permanent magnet synchronous generator using quasi-Z-source inverter. Electr. Power Syst. Res. 2019, 177, 106010. [Google Scholar]
- Krishnan, R. Permanent Magnet Synchronous and Brushless Dc Motor Drives; CRC Press: New York, NY, USA, 2010; pp. 279–328. [Google Scholar]
- Tang, R.Y. Theory and Design of Modern Permanent Magnet Motor, 2nd ed.; Machine Press: Beijing, China, 2019. [Google Scholar]
- Luo, Y.C.; Ye, Q.S. Analysis of Power Balance of Alternator in Automobile. Automot. Electr. Appl. 2018, 3, 4–10. [Google Scholar]
- Sharouni, S.; Naderi, P.; Hedayati, M.; Hajihosseini, P. Performance analysis of a novel outer rotor flux-switching permanent magnet machine as motor/generator for vehicular and aircraft applications. IET Electr. Power Appl. 2021, 15, 243–254. [Google Scholar] [CrossRef]
- Li, M.F.; Chen, Z.; Yu, Y. Means of circuits simulation analyzing in Protel DXP environment. Mod. Electron. Tech. 2014, 24, 108–112. [Google Scholar]
- GB/T23903-2009. Three-Wheeled Trucks and Low-Speed Vehicle Generators Machinery Industry Standard. Ministry of Industry and Information Technology: Beijing, China, 2009.
- Tian, G.; Yuan, G.; Aleksandrov, A.; Zhang, T.; Li, Z.; Fathollahi-Fard, A.M.; Ivanov, M. Recycling of spent Lithium-ion batteries: A comprehensive review for identification of main challenges and future research trends. Sustain. Energy Technol. Assess. 2022, 53, 102447. [Google Scholar] [CrossRef]
- Tian, G.; Zhang, C.; Fathollahi-Fard, A.M.; Li, Z.; Zhang, C.; Jiang, Z. An Enhanced social engineering optimizer for solving an energy-efficient disassembly line balancing problem based on bucket brigades and cloud theory. IEEE Trans. Ind. Inform. 2022, 1–11. [Google Scholar] [CrossRef]
- Tian, G.; Fathollahi-Fard, A.M.; Ren, Y.; Li, Z.; Jiang, X. Multi-objective scheduling of priority-based rescue vehicles to extinguish forest fires using a multi-objective discrete gravitational search algorithm. Inf. Sci. 2022, 608, 578–596. [Google Scholar] [CrossRef]
- Tian, G.; Chu, J.; Liu, Y.; Ke, H.; Zhao, X.; Xu, G. Expected energy analysis for industrial process planning problem with fuzzy time parameters. Comput. Chem. Eng. 2011, 35, 2905–2912. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Speed (r/min) | 2000 | 3000 | 4000 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Load (W) | 60 | 150 | 300 | 60 | 150 | 300 | 60 | 150 | 300 |
| Voltage (V) | 14.12 | 14.11 | 14.01 | 14.30 | 14.24 | 14.21 | 14.36 | 14.45 | 14.27 |
| Speed (r/min) | 2000 | 3000 | 4000 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Load (W) | 60 | 150 | 300 | 60 | 150 | 300 | 60 | 150 | 300 |
| Voltage (V) | 14.01 | 14.04 | 13.82 | 14.20 | 14.15 | 14.12 | 14.40 | 14.28 | 14.18 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, J.; Shi, L.; Golmohammadi, A.-M. Voltage-Stabilizing Method of Permanent Magnet Generator for Agricultural Transport Vehicles. Processes 2022, 10, 1726. https://doi.org/10.3390/pr10091726
Ma J, Shi L, Golmohammadi A-M. Voltage-Stabilizing Method of Permanent Magnet Generator for Agricultural Transport Vehicles. Processes. 2022; 10(9):1726. https://doi.org/10.3390/pr10091726
Chicago/Turabian StyleMa, Jianwei, Liwei Shi, and Amir-Mohammad Golmohammadi. 2022. "Voltage-Stabilizing Method of Permanent Magnet Generator for Agricultural Transport Vehicles" Processes 10, no. 9: 1726. https://doi.org/10.3390/pr10091726
APA StyleMa, J., Shi, L., & Golmohammadi, A.-M. (2022). Voltage-Stabilizing Method of Permanent Magnet Generator for Agricultural Transport Vehicles. Processes, 10(9), 1726. https://doi.org/10.3390/pr10091726