
Development of a Hydrokinetic Turbine Backwater Prediction Model for Inland Flow through Validated CFD Models


Abstract
:1. Introduction
2. Background
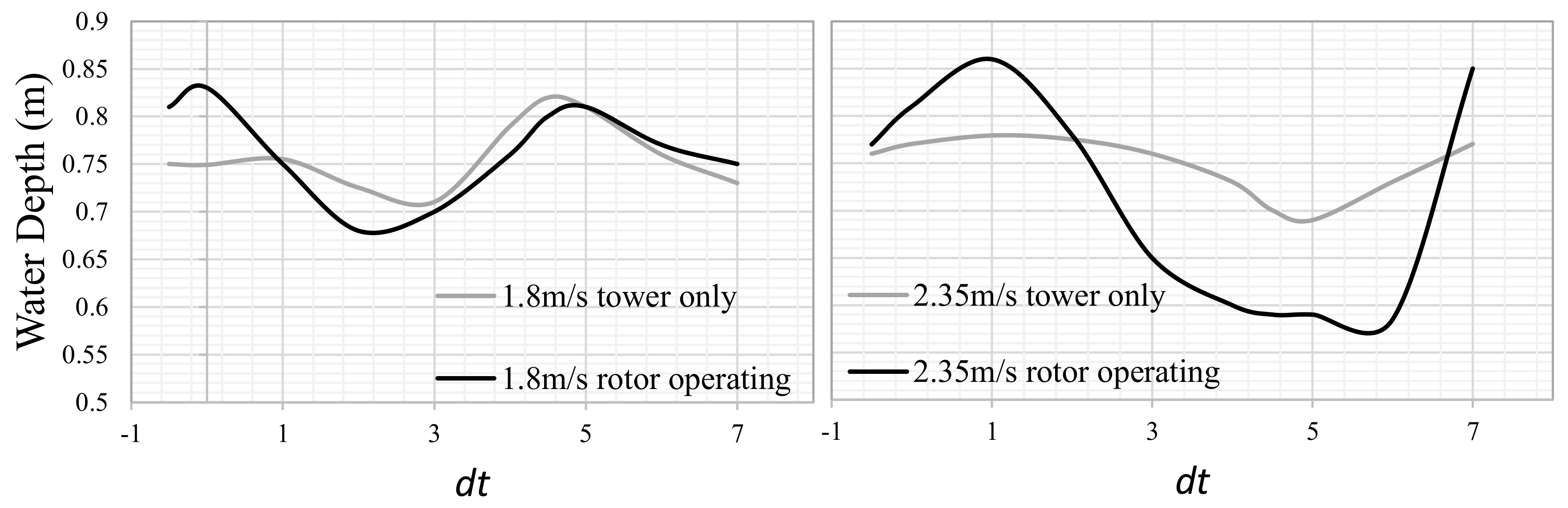
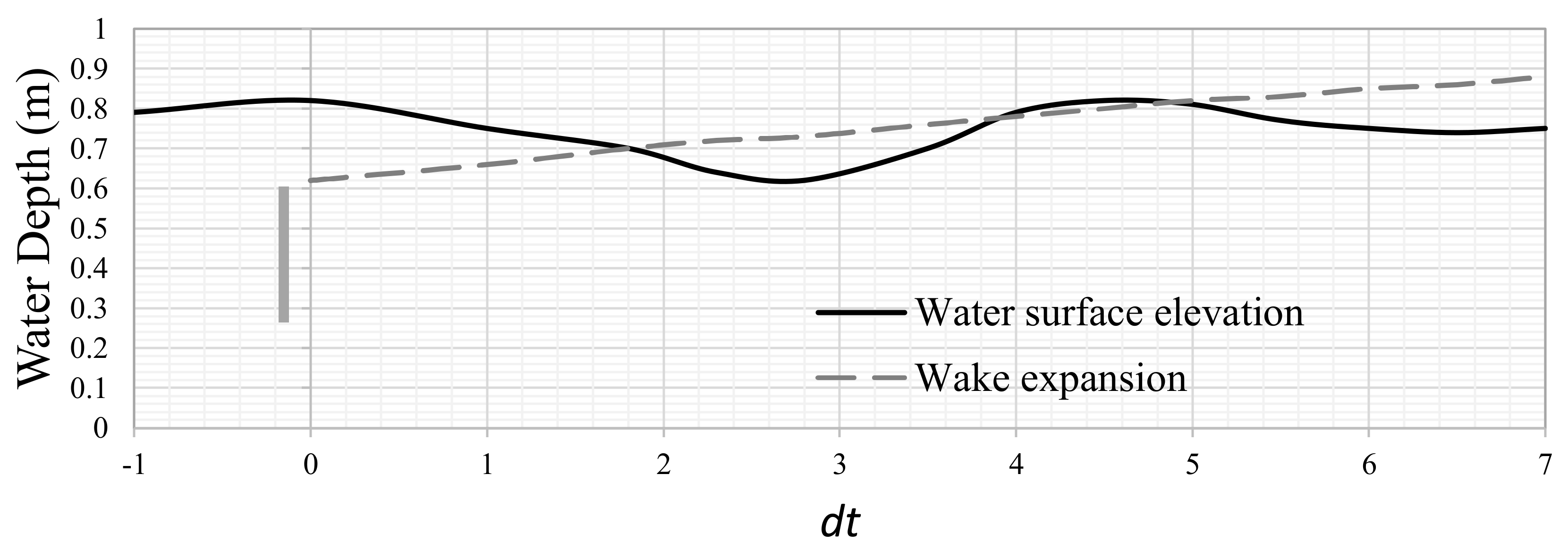
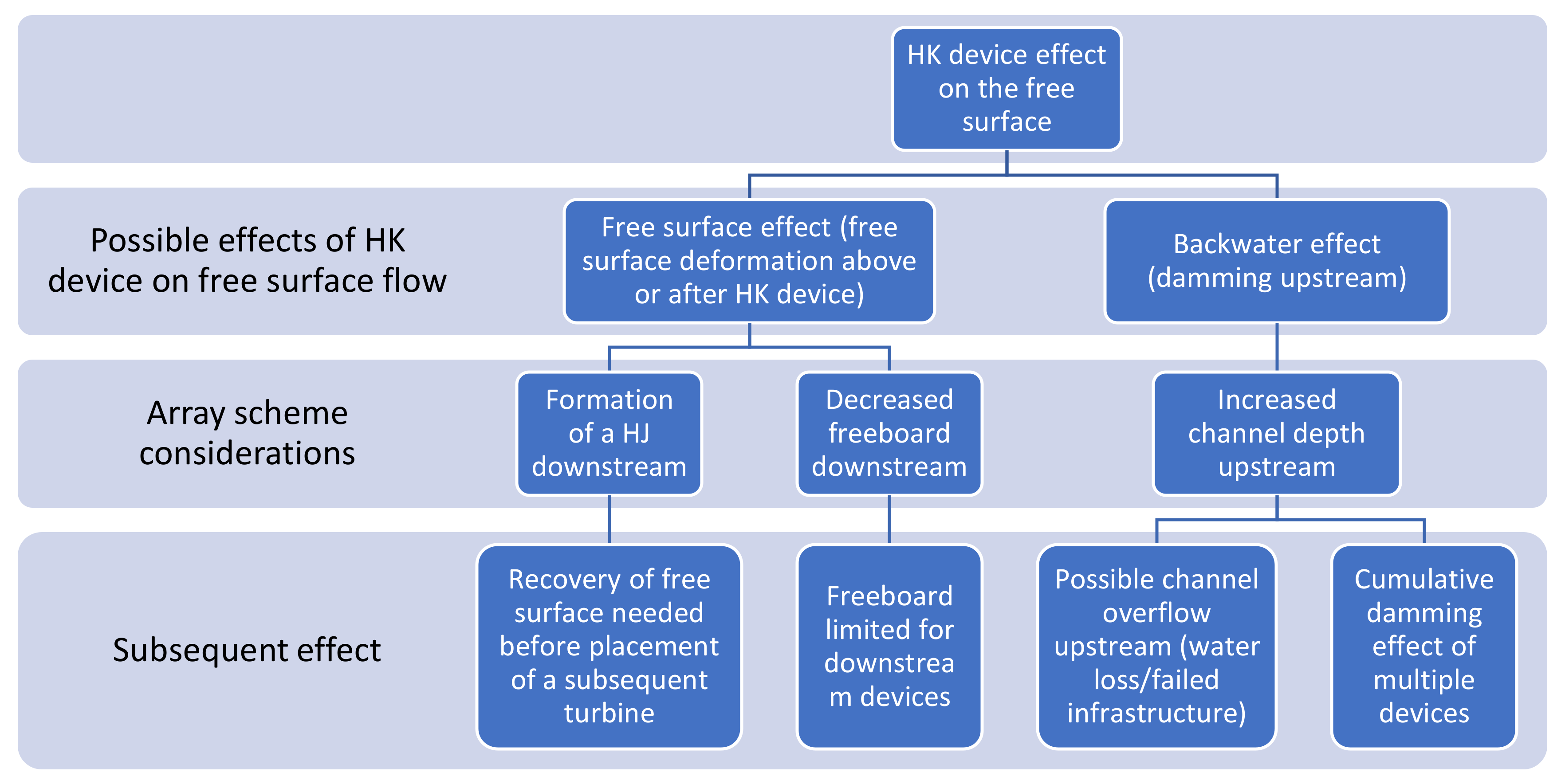
- Free-surface effects in the form of a possible standing wave formed, or decreased water surface above the turbine (due to decreasing pressure).
- Potential backwater effects caused (e.g., damming upstream).
2.1. Free-Surface Effects of HK Turbines
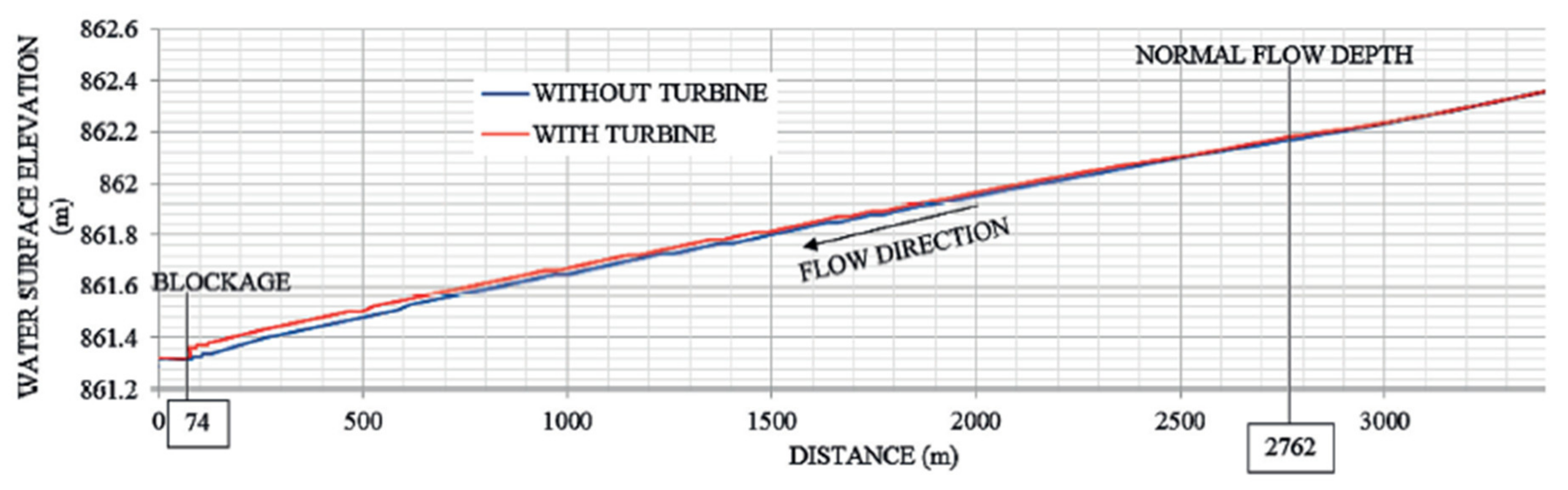
2.2. Backwater Effect
- The upstream free-surface deformation increased with FrD.
- The location of maximum damming (i.e., the highest water level) moved closer to the turbine as FrD increased.
2.3. Backwater Calculations
2.4. Summary of Literature
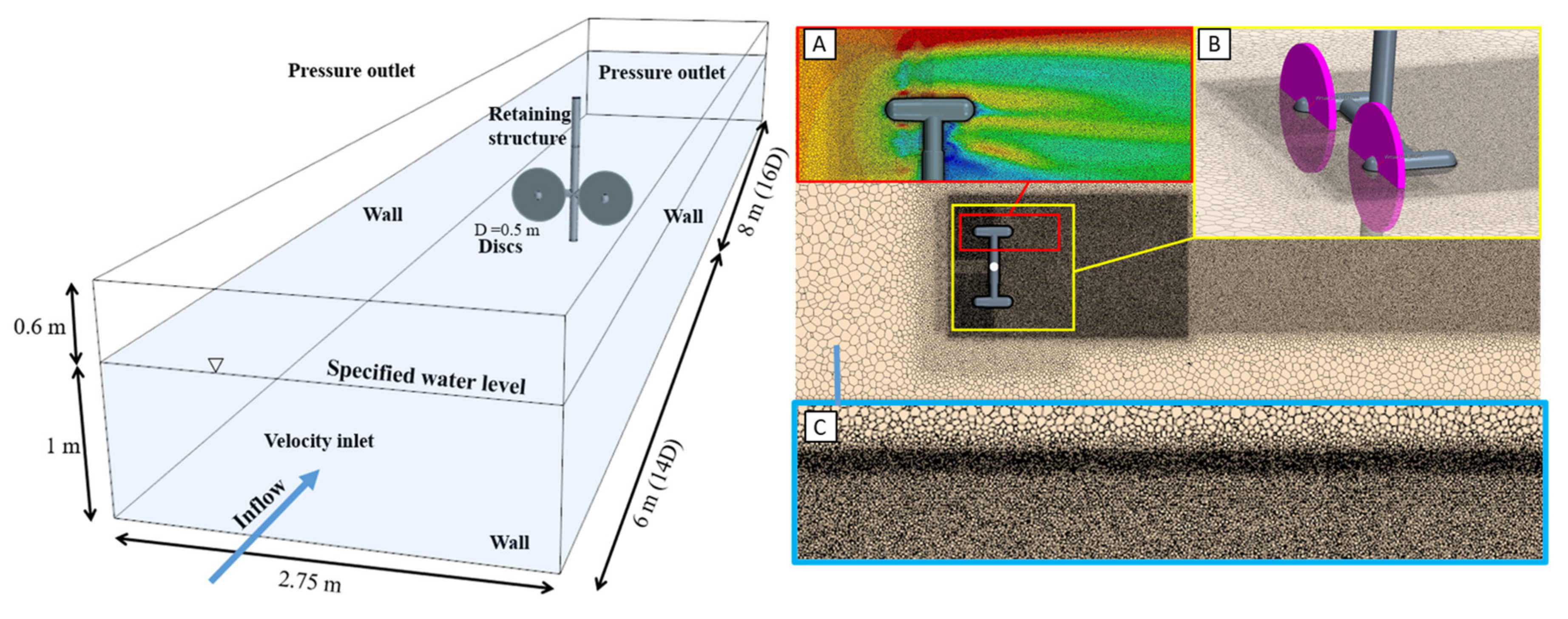
3. Validation of CFD Models
3.1. CFD Models
3.2. RM1 Model Validation
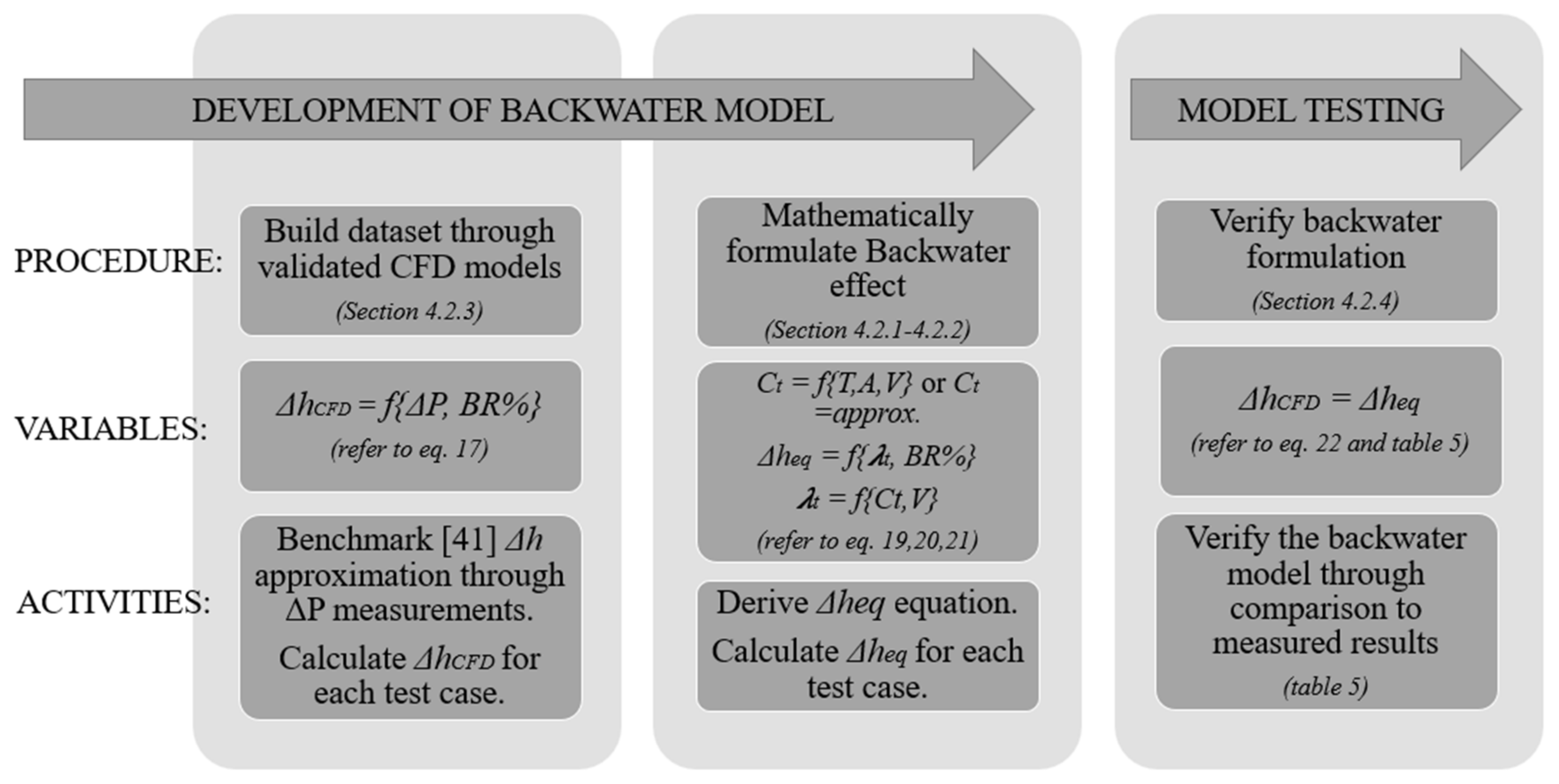
4. Methods
4.1. Assumptions and Exclusions
- Subcritical flow regime (Fr < 1);
- 5000 < Re < 1,500,000;
- Typical operational velocities of channels (0.8–2.8 m/s);
- Manning n-value around 0.016–0.023 s/m1/3 (lined channel).
4.2. Mathematical Formulation
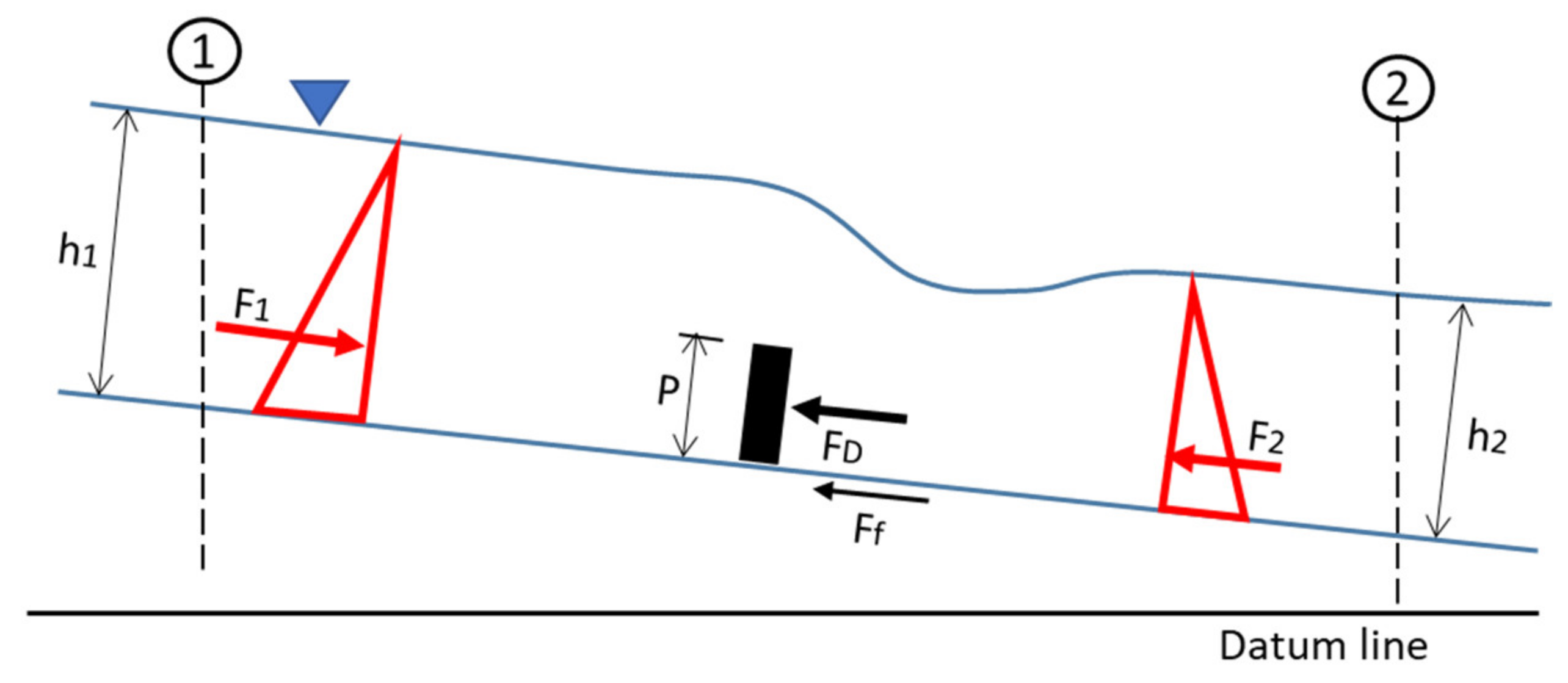
4.2.1. Approach 1: Momentum Approach
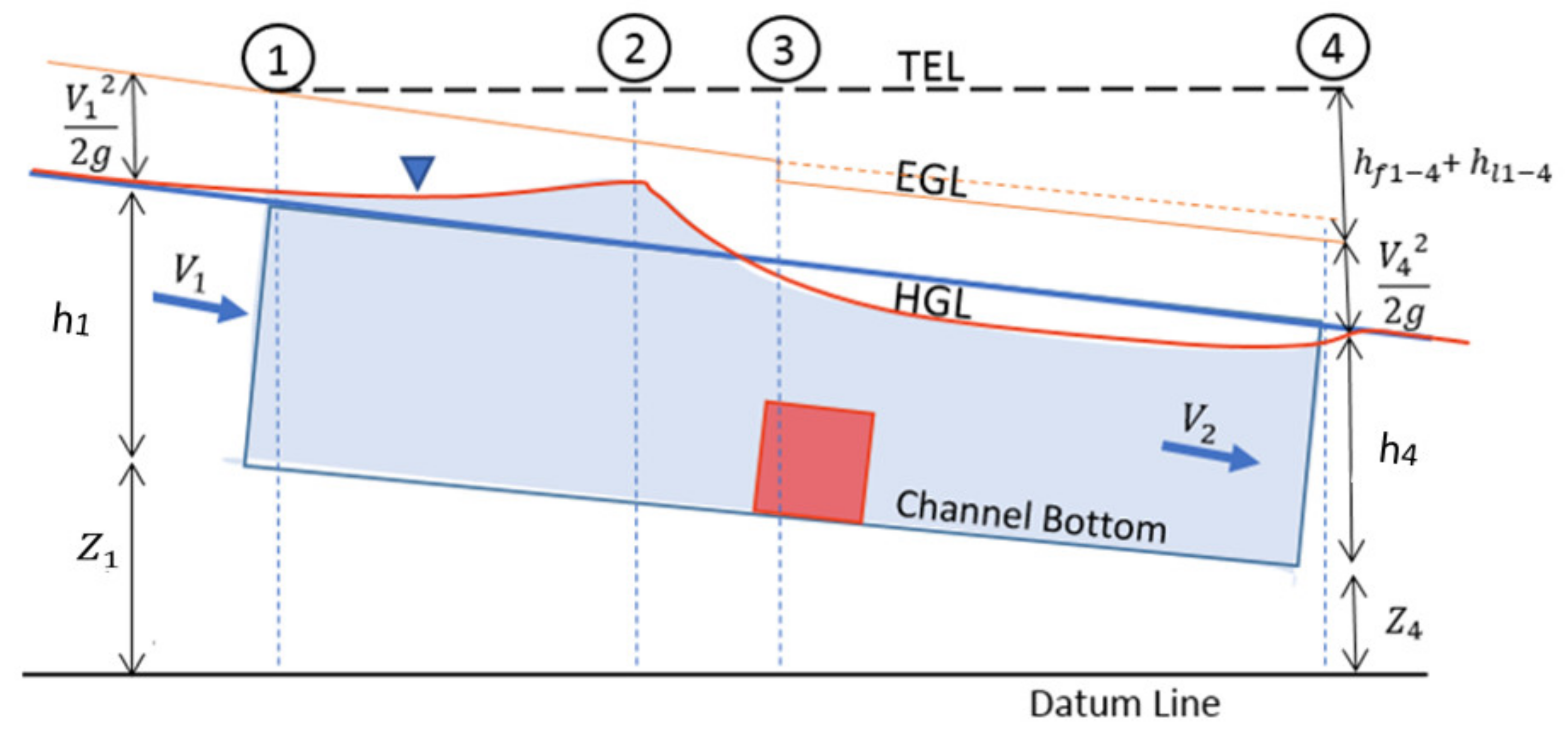
4.2.2. Approach 2: Energy Approach
4.2.3. Validation of Pressure Drop Measurement in CFD Results
4.2.4. Lambda Approximation
- Inlet velocity changes (0.4 < U < 2.8);
- Blockage ratio changes (Swept area to flow area) (4% < BR < 23%);
- Tip speed ratio changes (lower or higher load applied) (3 < TSR < 6);
- Froude number (0.18 < Fr < 0.34) (within the subcritical flow regime);
- Froude number based on turbine diameter (0.15 < FrD < 0.9).
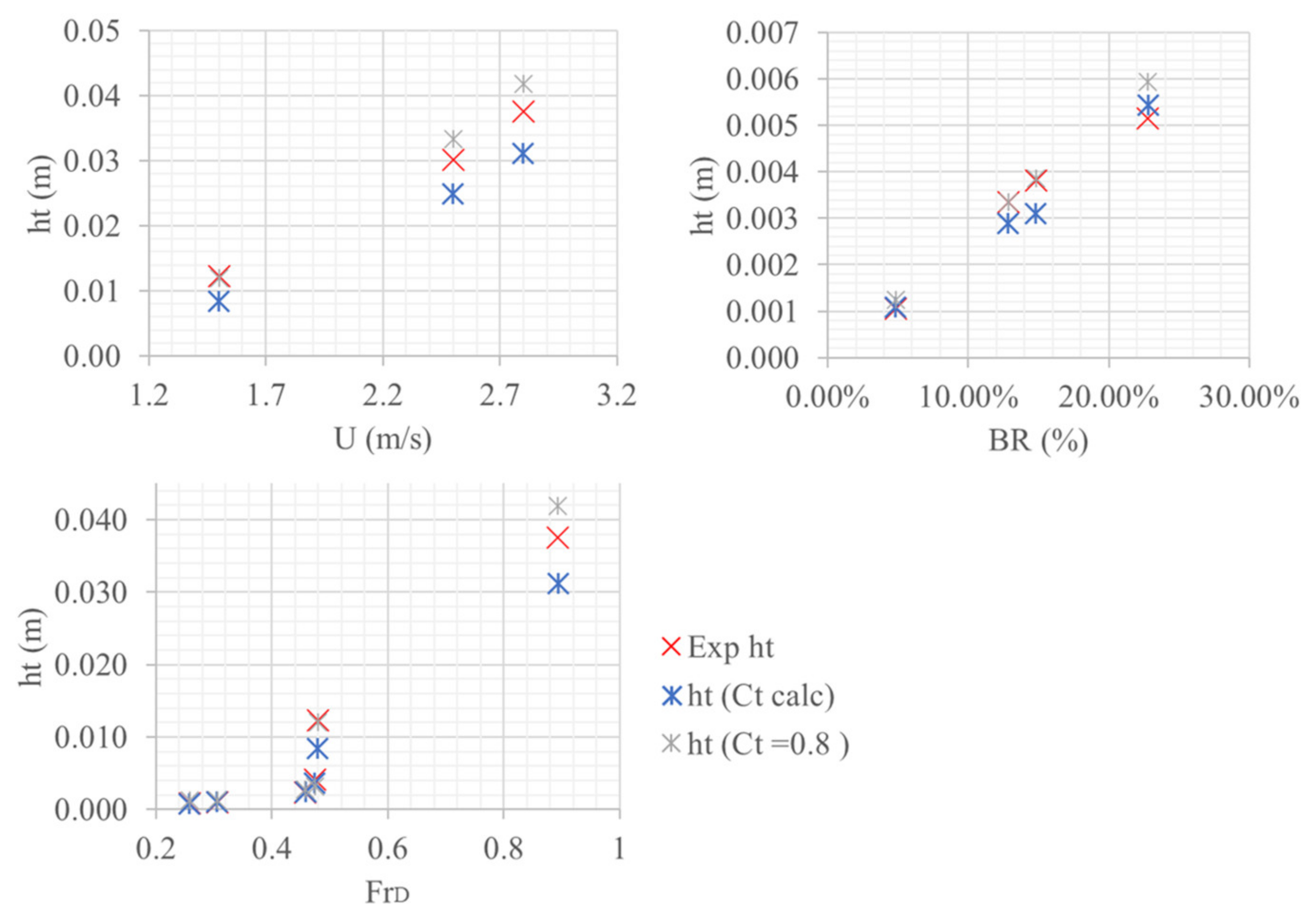
- At turbine optimal operational points, a maximum deviation of 13% from the predicted backwater was obtained when using the correct Ct value. This deviation increased to 19% for the Ct = 0.8 approximation.
- When utilizing the Ct assumption of 0.8, a conservative result was obtained, with the backwater estimation generally overestimating the measured blockage.
- Calculating Ct based on the turbine thrust (measured thrust) lowered the ht approximation. However, for test cases operating close to the optimal performance and highest Ct value, the backwater was underestimated by up to 20%.
- Test cases at low operational velocities (low Froude numbers) resulted in larger errors in approximating ht; however, it is important to note that these are unfavourable installation conditions and far from typical installations. The turbines may have low performance at these low operational velocities and, therefore, pose an unrealistic scenario. Here, the Ct calculation resulted in a more realistic value, due to the reduced performance.
- The Ct approximation resulted in large overestimations of the ht at lower TSRs. However, the Ct equation (Equation (22)) performed well in these scenarios, as the turbine thrust was significantly lower, and the Ct assumption did not hold.
- The Ct approximation gave significantly better results for the three-bladed turbines. The two-bladed (T1) case predicted better results with the Ct calculation, which was also higher than the 0.8 approximation, indicating that the turbine operates closer to the Betz limit and ideal induction factor (a), which could be further tested and calibrated. The Ct calculation performed better in this case, predicting Ct = 0.89. Therefore, utilizing this assumption may be favourable for avoiding errors—especially when turbines with higher operational tip speed ratios are used.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Niebuhr, C.M.; van Dijk, M.; Bhagwan, J.N. Development of a design and implementation process for the integration of hy-drokinetic devices into existing infrastructure in South Africa. Water SA 2019, 45, 434–446. [Google Scholar] [CrossRef] [Green Version]
- Riglin, J.D. Design, Manufacture and Prototyping of a Hydrokinetic Turbine Unit for River Application. Master’s Thesis, Lehigh University, Bethlehem, PA, USA, 2016. [Google Scholar]
- Runge, S. Performance and Technology Readiness of a Freestream Turbine in a Canal Environment. Ph.D. Thesis, Cardiff University, Cardiff, UK, 2018. [Google Scholar]
- Kartezhnikova, M.; Ravens, T.M. Hydraulic impacts of hydrokinetic devices. Renew. Energy 2014, 66, 425–432. [Google Scholar] [CrossRef] [Green Version]
- Gunawan, B.; Roberts, J.; Neary, V. Hydrodynamic Effects of Hydrokinetic Turbine Deployment in an Irrigation Canal. In Proceedings of the 3rd Marine Energy Technology Symposium, Washington, DC, USA, 27–29 April 2015; pp. 1–6. [Google Scholar]
- Bahaj, A.S.; Myers, L.E.; Rawlinson-Smith, R.I.; Thomson, M. The effect of boundary proximity upon the wake structure of horizontal axis marine current turbines. J. Offshore Mech. Arct. Eng. 2011, 134, 021104. [Google Scholar] [CrossRef]
- Bachant, P.; Wosnik, M. Effects of Reynolds Number on the Energy Conversion and Near-Wake Dynamics of a High Solidity Vertical-Axis Cross-Flow Turbine. Energies 2016, 9, 73. [Google Scholar] [CrossRef] [Green Version]
- Turnock, S.R.; Phillips, A.B.; Banks, J.; Nicholls-Lee, R. Modelling tidal current turbine wakes using a coupled RANS-BEMT approach as a tool for analysing power capture of arrays of turbines. Ocean Eng. 2011, 38, 1300–1307. [Google Scholar] [CrossRef] [Green Version]
- Mycek, P.; Gaurier, B.; Germain, G.; Pinon, G.; Rivoalen, E. Experimental study of the turbulence intensity effects on marine current turbines behaviour. Part II: Two interacting turbines. Renew. Energy 2014, 68, 876–892. [Google Scholar] [CrossRef] [Green Version]
- Hill, C.; Neary, V.S.; Guala, M.; Sotiropoulos, F. Performance and Wake Characterization of a Model Hydrokinetic Turbine: The Reference Model 1 (RM1) Dual Rotor Tidal Energy Converter. Energies 2020, 13, 5145. [Google Scholar] [CrossRef]
- Lalander, E.; Leijon, M. In-stream energy converters in a river—Effects on upstream hydropower station. Renew. Energy 2011, 36, 399–404. [Google Scholar] [CrossRef]
- Myers, L.; Bahaj, A.S. Wake studies of a 1/30th scale horizontal axis marine current turbine. Ocean Eng. 2007, 34, 758–762. [Google Scholar] [CrossRef]
- Adamski, S.J. Numerical Modeling of the Effects of a Free Surface on the Operating Characteristics of Marine Hydrokinetic Turbines. Ph.D. Thesis, University of Washington, Washington, DC, USA, 2013. [Google Scholar]
- Henderson, F.M. Open Channel Flow; The Mcmillan Company: New York, NY, USA, 1966. [Google Scholar]
- Birjandi, A.H.; Bibeau, E.L.; Chatoorgoon, V.; Kumar, A. Power measurement of hydrokinetic turbines with free-surface and blockage effect. Ocean Eng. 2013, 69, 9–17. [Google Scholar] [CrossRef]
- Niebuhr, C.; van Dijk, M.; Neary, V.; Bhagwan, J. A review of hydrokinetic turbines and enhancement techniques for canal installations: Technology, applicability and potential. Renew. Sustain. Energy Rev. 2019, 113, 109240. [Google Scholar] [CrossRef]
- Whelan, J.I.; Graham, J.M.R.; Peiró, J. A free-surface and blockage correction for tidal turbines. J. Fluid Mech. 2009, 624, 281–291. [Google Scholar] [CrossRef]
- Polagye, B.L. Hydrodynamic Effects of Kinetic Power Extraction by In-Stream Tidal Turbines; University of Washington: Washington, DC, USA, 2009. [Google Scholar]
- Bryden, I.; Grinsted, T.; Melville, G. Assessing the potential of a simple tidal channel to deliver useful energy. Appl. Ocean Res. 2004, 26, 198–204. [Google Scholar] [CrossRef]
- Chanson, H. Hydraulics of Open Channel Flow, 2nd ed.; Elsevier Science & Technology: Amsterdam, The Netherlands, 2004. [Google Scholar]
- Mańko, R. Ranges of Backwater Curves in Lower Odra. Civ. Environ. Eng. Rep. 2018, 28, 25–35. [Google Scholar] [CrossRef] [Green Version]
- Garrett, C.; Cummins, P. The efficiency of a turbine in a tidal channel. J. Fluid Mech. 2007, 588, 243–251. [Google Scholar] [CrossRef] [Green Version]
- Garrett, C.; Cummins, P. The power potential of tidal currents in channels. Proc. R. Soc. A Math. Phys. Eng. Sci. 2005, 461, 2563–2572. [Google Scholar] [CrossRef]
- Ross, H.; Polagye, B. An experimental assessment of analytical blockage corrections for turbines. Renew. Energy 2020, 152, 1328–1341. [Google Scholar] [CrossRef] [Green Version]
- López, Y.; Contreras, L.; Laín, S. CFD Simulation of a Horizontal Axis Hydrokinetic Turbine. Renew. Energy Power Qual. J. 2017, 1, 512–517. [Google Scholar] [CrossRef]
- Laín, S.; Contreras, L.T.; López, O. A review on computational fluid dynamics modeling and simulation of horizontal axis hydrokinetic turbines. J. Braz. Soc. Mech. Sci. Eng. 2019, 41, 375. [Google Scholar] [CrossRef]
- Adcock, T.A.; Draper, S.; Nishino, T. Tidal power generation—A review of hydrodynamic modelling. J. Power Energy 2015, 229, 755–771. [Google Scholar] [CrossRef]
- Nishino, T.; Willden, R.H. Effects of 3-D channel blockage and turbulent wake mixing on the limit of power extraction by tidal turbines. Int. J. Heat Fluid Flow 2012, 37, 123–135. [Google Scholar] [CrossRef]
- Nishino, T.; Willden, R.H.J. Two-scale dynamics of flow past a partial cross-stream array of tidal turbines. J. Fluid Mech. 2013, 730, 220–244. [Google Scholar] [CrossRef] [Green Version]
- Gotelli, C.; Musa, M.; Guala, M.; Escauriaza, C. Experimental and Numerical Investigation of Wake Interactions of Marine Hydrokinetic Turbines. Energies 2019, 12, 3188. [Google Scholar] [CrossRef] [Green Version]
- Sanderse, B.; van der Pijl, S.P.; Koren, B. Review of computational fluid dynamics for wind turbine wake aerodynamics. Wind Energy 2011, 14, 799–819. [Google Scholar] [CrossRef] [Green Version]
- Whale, J.; Anderson, C.; Bareiss, R.; Wagner, S. An experimental and numerical study of the vortex structure in the wake of a wind turbine. J. Wind Eng. Ind. Aerodyn. 2000, 84, 1–21. [Google Scholar] [CrossRef]
- Pyakurel, P.; Tian, W.; VanZwieten, J.H.; Dhanak, M. Characterization of the mean flow field in the far wake region behind ocean current turbines. J. Ocean Eng. Mar. Energy 2017, 3, 113–123. [Google Scholar] [CrossRef]
- Masters, I.; Chapman, J.C.; Willis, M.R.; Orme, J.A.C. A robust blade element momentum theory model for tidal stream tur-bines including tip and hub loss corrections. J. Mar. Eng. Technol. 2014, 10, 25–35. [Google Scholar] [CrossRef] [Green Version]
- Guo, Q.; Zhou, L.; Wang, Z. Comparison of BEM-CFD and full rotor geometry simulations for the performance and flow field of a marine current turbine. Renew. Energy 2015, 75, 640–648. [Google Scholar] [CrossRef]
- Malki, R.; Masters, I.; Williams, A.J.; Croft, N. The variation in wake structure of a tidal stream turbine with flow velocity. In Proceedings of the MARINE 2011, IV International Conference on Computational Methods in Marine Engineering, Lisbon, Portugal, 28–30 September 2011. [Google Scholar] [CrossRef]
- Edmunds, M.; Williams, A.; Masters, I.; Croft, N. An enhanced disk averaged CFD model for the simulation of horizontal axis tidal turbines. Renew. Energy 2017, 101, 67–81. [Google Scholar] [CrossRef] [Green Version]
- Masters, I.; Williams, A.; Croft, T.N.; Togneri, M.; Edmunds, M.; Zangiabadi, E.; Fairley, I.; Karunarathna, H. A Comparison of Numerical Modelling Techniques for Tidal Stream Turbine Analysis. Energies 2015, 8, 7833–7853. [Google Scholar] [CrossRef] [Green Version]
- Masters, I.; Malki, R.; Williams, A.J.; Croft, T.N. The influence of flow acceleration on tidal stream turbine wake dynamics: A numerical study using a coupled BEM–CFD model. Appl. Math. Model. 2013, 37, 7905–7918. [Google Scholar] [CrossRef]
- Niebuhr, C.; Schmidt, S.; van Dijk, M.; Smith, L.; Neary, V. A review of commercial numerical modelling approaches for axial hydrokinetic turbine wake analysis in channel flow. Renew. Sustain. Energy Rev. 2022, 158, 112151. [Google Scholar] [CrossRef]
- Mycek, P.; Gaurier, B.; Germain, G.; Pinon, G.; Rivoalen, E. Experimental study of the turbulence intensity effects on marine current turbines behaviour. Part I: One single turbine. Renew. Energy 2014, 66, 729–746. [Google Scholar] [CrossRef] [Green Version]
- Hill, C.; Neary, V.S.; Gunawan, B.; Guala, M.; Sotiropoulos, F.U.S. Department of Energy Reference Model Program RM1: Experimental Results; University of Minnesota: Minneapolis, MN, USA, 2014. [Google Scholar]
- Nasef, M.H.; El-Askary, W.A.; AbdEL-hamid, A.A.; Gad, H.E. Evaluation of Savonius rotor performance: Static and dynamic studies. J. Wind Eng. Ind. Aerodyn. 2013, 123, 1–11. [Google Scholar] [CrossRef]
- Franke, J.; Hirsch, C.; Jensen, A.G.; Krus, H.W.; Schatzmann, P.S.; Miles, S.D.; Wisse, J.A.; Wright, N.G. Recommendations on the use of CFD in wind engineering. In Proceedings of the CWE2006 Fourth International Symposium Computational Wind Engineering, Yokohama, Japan, 16–19 July 2006. [Google Scholar]
- Malki, R.; Williams, A.; Croft, T.; Togneri, M.; Masters, I. A coupled blade element momentum—Computational fluid dynamics model for evaluating tidal stream turbine performance. Appl. Math. Model. 2013, 37, 3006–3020. [Google Scholar] [CrossRef] [Green Version]
- Bekker, A.; Van Dijk, M.; Niebuhr, C.M. A review of low head hydropower at wastewater treatment works and development of an evaluation framework for South Africa. Renew. Sustain. Energy Rev. 2022, 159, 112216. [Google Scholar] [CrossRef]
- Shen, W.Z.; Mikkelsen, R.; Sørensen, J.N.; Bak, C. Tip loss corrections for wind turbine computations. Wind Energy 2005, 8, 457–475. [Google Scholar] [CrossRef]
- Speziale, C.G.; Sarkar, S.; Gatski, T.B. Modelling the pressure-strain correlation of turbulence: An invariant dynamical systems approach. J. Fluid. Mech. 1991, 227, 245–272. [Google Scholar] [CrossRef]
- Sarkar, S.; Lakshmanan, B. Application of a Reynolds stress turbulence model to the compressible shear layer. AIAA J. 1991, 29, 743–749. [Google Scholar] [CrossRef] [Green Version]
- Roache, P.J. Perspectvie: A method for Uniform Reporting of Grid Refinement Studies. J. Fluids Eng. Trans. ASME 1994, 116, 405–413. [Google Scholar] [CrossRef]
- Silva, P.A.S.F.; De Oliveira, T.F.; Brasil Junior, A.C.P.; Vaz, J.R.P.P.; Oliveira, T.F.D.E.; Junior, A.C.P.B.; Vaz, J.R.P.P. Numerical Study of Wake Characteristics in a Horizontal-Axis Hydrokinetic Turbine. Ann. Braziian Acad. Sci. 2016, 88, 2441–2456. [Google Scholar] [CrossRef] [Green Version]
- Gibson, M.M.; Launder, B.E. Ground effects on pressure fluctuations in the atmospheric boundary layer. J. Fluid Mech. 1978, 86, 491–511. [Google Scholar] [CrossRef]
- Neary, V.S.; Gunawan, B.; Hill, C.; Chamorro, L.P. Near and far field flow disturbances induced by model hydrokinetic tur-bine: ADV and ADP comparison. Renew. Energy 2013, 60, 1–6. [Google Scholar] [CrossRef]
- Yarnell, D. Bridge Piers as Channel Obstructions; United States Department of Agriculture: Washington, DC, USA, 1934. [Google Scholar]
- Azinfar, H.; Kells, J.A. Backwater Prediction due to the Blockage Caused by a Single, Submerged Spur Dike in an Open Channel. J. Hydraul. Eng. 2008, 134, 1153–1157. [Google Scholar] [CrossRef]
- Martin-Vide, J.; Prio, J. Backwater of arch bridges under free and submerged conditions. J. Hydraul. Res. 2005, 43, 515–521. [Google Scholar] [CrossRef]
- Follett, E.; Schalko, I.; Nepf, H. Momentum and Energy Predict the Backwater Rise Generated by a Large Wood Jam. Geophys. Res. Lett. 2020, 47, e2020GL089346. [Google Scholar] [CrossRef]
- Kocaman, S. Prediction of Backwater Profiles due to Bridges in a Compound Channel Using CFD. Adv. Mech. Eng. 2014, 6, 905217. [Google Scholar] [CrossRef]
- Azinfar, H.; Kells, J.A. Drag force and associated backwater effect due to an open channel spur dike field. J. Hydraul. Res. 2011, 49, 248–256. [Google Scholar] [CrossRef]
- Raju, K.R.; Rana, O.; Asawa, G.; Pillai, A. Rational assessment of blockage effect in channel flow past smooth circular cylinders. J. Hydraul. Res. 1983, 21, 289–302. [Google Scholar] [CrossRef]
- Morandi, B.; Di Felice, F.; Costanzo, M.; Romano, G.; Dhomé, D.; Allo, J. Experimental investigation of the near wake of a horizontal axis tidal current turbine. Int. J. Mar. Energy 2016, 14, 229–247. [Google Scholar] [CrossRef]
- Jeffcoate, P.; Whittaker, T.; Boake, C.; Elsaesser, B. Field tests of multiple 1/10 scale tidal turbines in steady flows. Renew. Energy 2016, 87, 240–252. [Google Scholar] [CrossRef]
- Stallard, T.; Collings, R.; Feng, T.; Whelan, J. Interactions between tidal turbine wakes: Experimental study of a group of three-bladed rotors. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2013, 371, 20120159. [Google Scholar] [CrossRef] [PubMed]
- Lam, W.-H.; Chen, L. Equations used to predict the velocity distribution within a wake from a horizontal-axis tidal-current turbine. Ocean Eng. 2014, 79, 35–42. [Google Scholar] [CrossRef]
- Sandia National Laboritories: Refernce Model Porject (RMP). Available online: https://energy.sandia.gov/programs/renewable-energy/water-power/projects/reference-model-project-rmp/ (accessed on 21 January 2022).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Turbine | Clearance Coefficient | |
|---|---|---|
| Seaflow | 2-Bladed, 300 kW | 0.18–0.64 |
| SeaGen | 2-Bladed, 1.2 MW (2× 600 kW) | 0.25–0.38 |
| HS300 | 3-Bladed, 300 kW | 0.75 |
| AK-1000 | 3-Bladed, 1 MW | 1.02 |
| Turbine | Name | Blades | Diameter (m) | CFD Model |
|---|---|---|---|---|
| T1 | RM1 [10] | 2-Bladed NACA4415 | 0.5 | Multiphase RSM-BEM model |
| T2 | IFREMER [9] | 3-Bladed NACA63418 | 0.7 | Single-phase RSM-BEM model |
| T3 | SHP [1] | 3-Bladed custom blade | 1 | Single-phase RSM-FRG model |
| Description | Variable |
|---|---|
| Rotor diameter | 0.5 m |
| Blade profile | NACA 4415 |
| Flow depth | 1 m |
| Flow rate | 2.425 m3/s |
| Tip speed ratios measured | 1 to 9 |
| Flow velocity (Uhub) | 1.05 m/s |
| Turbulence intensity | 5% |
| Froude number | 0.28 |
| Reynolds number (chord) | ~3.0 × 105 |
| ΔPt Disk (Pa) | ΔPt Plane (Pa) | Yarnell Approx. (mm) | ||||
|---|---|---|---|---|---|---|
| RM1 (no stanchion) | 570 | 57.73 | 8.30 | - | 9.60 | 0.13% |
| RM1 (with stanchion) | 530 | 74.09 | 7.72 | 4.36 | 12.00 | 0.01% |
| 12.66 | ||||||
| Test Condition | Ct | N | MAE | Variance |
|---|---|---|---|---|
| All tests conducted | Equation (21) | 14 | 1.45 | 2.26 |
| 0.8 | 14 | 1.42 | 2.17 | |
| 0.89 | 14 | 1.99 | 4.27 | |
| Optimal operational point | Equation (21) | 3 | 1.26 | 1.85 |
| 0.8 | 3 | 1.25 | 1.83 | |
| Variation of blockage ratios (BR = 4–22%) at optimal operational point | Equation (21) | 4 | 0.35 | 0.16 |
| 0.8 | 4 | 0.27 | 0.09 | |
| Variation of inlet velocities at optimal tip speed ratios | Equation (21) | 4 | 2.4 | 7.65 |
| 0.8 | 4 | 1.36 | 2.47 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Niebuhr, C.M.; Hill, C.; Van Dijk, M.; Smith, L. Development of a Hydrokinetic Turbine Backwater Prediction Model for Inland Flow through Validated CFD Models. Processes 2022, 10, 1310. https://doi.org/10.3390/pr10071310
Niebuhr CM, Hill C, Van Dijk M, Smith L. Development of a Hydrokinetic Turbine Backwater Prediction Model for Inland Flow through Validated CFD Models. Processes. 2022; 10(7):1310. https://doi.org/10.3390/pr10071310
Chicago/Turabian StyleNiebuhr, Chantel Monica, Craig Hill, Marco Van Dijk, and Lelanie Smith. 2022. "Development of a Hydrokinetic Turbine Backwater Prediction Model for Inland Flow through Validated CFD Models" Processes 10, no. 7: 1310. https://doi.org/10.3390/pr10071310
APA StyleNiebuhr, C. M., Hill, C., Van Dijk, M., & Smith, L. (2022). Development of a Hydrokinetic Turbine Backwater Prediction Model for Inland Flow through Validated CFD Models. Processes, 10(7), 1310. https://doi.org/10.3390/pr10071310