1. Introduction
Liquidity risk is the risk caused by the adverse movement of a price which corresponds to a trading size. A large buy order drives the price up and a large sale order drives it down. Therefore, a large trader is always exposed to this hidden possible loss. Although the idea that the evolution of the stock price depends on the trading volume has existed for several decades, it was not widely studied until only about a decade ago. In the past decade, the literature on the liquidity risk has been growing rapidly; for example,
Jarrow (
1992,
1994,
2001);
Back (
1993);
Frey (
1998,
2000);
Frey and Stremme (
1997);
Cvitanic and Ma (
1996);
Subramanian and Jarrow (
2001);
Duffie and Ziegler (
2001);
Bank and Baum (
2004);
Cetin et al. (
2004);
Jarrow (
1992,
1994) proposed a discrete-time framework where prices depend on the large trader’s activities via a reaction function of his/her instantaneous holdings. He found conditions for the existence of arbitrage opportunities for a large trader.
Cvitanic and Ma (
1996) studied a diffusion model for the price dynamics where the drift and volatility coefficients depend on the large investor’s trading strategy.
Frey and Stremme (
1997) developed a continuous-time analogue to Jarrow’s discrete-time framework. They derived an explicit expression for the transformation of market volatility with a large trader.
Although the cost caused by the liquidity risk have been studied widely both theoretically and empirically, most models in mathematical finance did not include it.
Cetin et al. (
2004,
2006) introduced a rigorous mathematical model of the liquidity cost and showed modified fundamental theorems of the asset pricing.
Bank and Baum (
2004) introduced a general continuous-time model for an illiquid financial market with a single large trader. They proved the absence of arbitrage for a large trader, characterized the set of approximately attainable claims and showed how to compute superreplication prices. Studies related to this topic extend to
Cetin et al. (
2010);
Rogers and Singh (
2010).
Ku et al. (
2012) studied a discrete time hedging strategy with liquidity risk under the Black-Scholes model
Black and Scholes (
1973). They used the Leland discretization scheme to find the optimal discrete time hedging strategy under the Black-Scholes model. As an extension of it, we study in this paper a more general underlying model which is called the constant elasticity of variance (CEV) model. The CEV model generalizes the Black-Scholes model so that it can capture volatility smile effect. The model is widely used by practitioners in the financial industry, especially to model equities and commodities. The CEV model, introduced by
Cox (
1975);
Cox and Ross (
1976) is the following,
Here,
(elasticity),
(mean return rate) and
(volatility) are given constants. Note that the particular case
corresponds to the well-known Black-Scholes model
Black and Scholes (
1973).
On the other hand, many underlying assets are still approximately close to a log-normal distribution. This suggests that the elasticity constant is not exactly 2, but is close to 2. In this sence, we set to apply the asymptotic analysais where .
In
Cetin et al. (
2004,
2006), the stock price
depends on the time
t and trading volume
x. They assume the multiplicative model
, where
f is smooth and increasing function with
.
becomes a marginal stock price. Empirical studies suggest that the liquidity cost is relatively small compared to the stock price, as in
Cetin et al. (
2006). In other words,
is a small positive number. We refer to
Cetin et al. (
2006) for details.
These two observations motivate us to use the perturbation theory
Hinch (
2003) for partial differential equations (PDEs) in the liquidity risk problem. The perturbation method is a mathematical method for obtaining an approximate solution to a given problem which cannot be solved exactly, by starting from the exact solution of a related problem. Perturbation theory is used when the problem is formulated by a small term to a mathematical description of the exactly solvable problem. For example, see
Park and Kim (
2011). Perturbation theory is a useful tool to deal with liquidity risk under the CEV diffusion model based on some small parameters. It gives us a practical advantage in pricing of financial derivatives with the liquidity risk.
The CEV diffusion model is the easiest model to explain the volatility smile phenomenon. It has the disadvantage that the implied volatility estimated by the deep OTM(Out of The Money) option does not match the actual data, but it is easy to apply and the accuracy is guaranteed near the ATM(At The Money). Therefore, when reflecting the skewed phenomenon and hedge the options near ATM, it has a practical advantage compared to the stochastic volatility model. However, it is inadequate to deal with the hedge of a complex structured derivatives, which is inadequate compared to the stochastic volatility model, and subsequent studies need to address the liquidity model under the stochastic volatility model.
We study the liquidity risk under the CEV diffusion model. We apply the Leland approximation scheme (
Leland 1985) to obtain a nonlinear partial differential equation for the option pricing. We find an approximation solution of this problem using the perturbation method.
The rest of this paper is organized as follows.
Section 2 introduces the Cetin et al. model and the CEV diffusion.
Section 3 gives us a nonlinear partial differential equation for the option pricing with the liquidity cost.
Section 4 discusses an analytic solution for the PDE given in
Section 3.
3. The Pricing Equation
We consider a European put option
with the expiration date
T with the strike price
K, and let
be the price of it at time
t. (We can similarly deal with call options and other European options, however, we only deal with a put option here.) We consider the delta hedging
defined by
for a price function
P. Although the market is still complete, since we deal with a discrete time trading with the liquidity cost, a perfect hedging is not possible. Therefore, we cannot make the hedging error 0. However, we can provide a sufficient pricing equation whose expected hedging error approaches zero as
. We assume that
is a class of
.
The next theorem gives us a hedging strategy which makes the expected hedging error go to 0 as the size of the time step gets smaller. Recall that .
Theorem 1. Let be the solution of the nonlinear partial differential equationwith the terminal condition . Then the expected hedging error of the corresponding delta hedging strategy approaches 0 as . Proof. First, we consider Taylor expansion formulas of
P,
X.
From (
7) and
, we have
On the other hands, by the Taylor expansion formula, we also have
Moreover, from (
5),
Therefore, (
12) becomes
Now, the hedging error is
Since
Z is a standard normal, we have
Therefore,
if
P satisfies
Finally, the terminal condition follows from the definition of the put option. □
We notice that the the effect of the liquidity cost appear through the first derivative . We now study the convergence of the discrete hedging strategy to the payoff of the option. Let be the hedging error over , .
Theorem 2. Consider the discrete hedging strategy where is a solution of the Equation (9). Its value at the terminal time T converges almost surely to the payoff of the option as . Proof. Since
is smooth, we can check that
where
M is a constant which does not depend on
. Therefore, we have
Moreover, we have
Therefore, by the Law of Large Numbers for Martingales (refer to
Feller 1970), we obtain
This implies that the total error
as
a.s.. □
The above theorem tells us that the delta hedging strategy in Equation (
9) asymptotically replicates the contingent claim as the time interval gets smaller. So, the next step is to calculate
so that we can calculate the corresponding hedging strategy. We study this in the following section.
4. Asymptotic Expansion of the Solution
In this section, we discuss an analytic solution of the Equation (
9). Since
satisfies the nonlinear partial differential equation (NPDE) (9), it is hard to find a closed form solution. However, as we already discussed before for the expansion of
f, we can apply the asymptotic expansion to (9). We first assume that there exists a series
such that
. Now, we reformulate the NPDE (Nonlinear Partial Differential Equations) (
9),
Note that the first term is an
order term, the second is an
order one, and the third term is an
term. Inserting these series form into (
24), we obtain following equations for each coefficient
for
,
where terminal conditions are given by
and
. In general, we obtain the partial differential equation for
,
where
.
4.1. A Solution of Each Coefficient
To find
for
, we need a lemma about the Feynman-Kac formula for our nonhomogeneous PDE. First, we define a geometric Brownian motion
by
and a differential operator
Then, we have the following.
Lemma 1. If the solution of the PDE problem satisfies the condition and , then is given by Proof. This is the well-known Feynman-Kac formula for the Black-Scholes model. It provides a stochastic representation of the solution of PDEs. We refer to the chapter 8 of
Oksendal (
2003) for details. □
The next theorem give us , which is the first term of the expansion.
Theorem 3. The leading order solution is given by Proof. This is the well-known Black-Scholes put option price. We refer to
Shreve (
2000) for details. □
Next, we find a solution of remaining terms for general l and m.
Theorem 4. For , the solution is recursively given by Proof. First, we consider the case
. In this case,
. Since
is smooth on only
and continuous at
, we have to deal with it carefully. First, note that there exist a smooth function
on
such that
. Now we consider the PDE
where
. By Lemma 1, we have
It is well-known that the solution of PDE
and
is
(the uniqueness of a solution). Therefore,
as
. By the dominated convergence theorem, we have
On the other hand,
leads to
Moreover,
is twice continuously differentiable with respect to
s. On the other hand, we can obtain the similar result for
using the same argument. Now, we use the induction argument. Suppose that
satisfies the assumption of Lemma 1. Then we have
□
Using the above theorem, we can calculate
and the corresponding hedging strategy
. While it is hard to calculate these quantities analytically, we can calculate these relatively easily numerically.
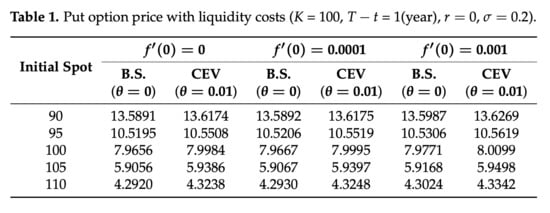
Table 1 shows the European put option price with the liquidity cost computed by our approximation formula. We present an approximate option price,
. Option prices are obtained by solving the formula given in Theorem 4. Parameters that we use here are
,
,
and
year.
Table 1 presents numerical results for several cases. We use the formula (31) and numerical integration for the first order (
or
) calculation. The first example,
is the case without the liquidity cost. In this case, we can buy and sell the underlying asset at the spot price. However, in reality, the liquidity provider quotes different prices for buying and selling, and the liquidity cost does exist. So we can only buy or sell the underlying asset after adding the bid and ask spread. The second and the third cases are when the regular bid and ask spread rates are 0.000001 and 0.00001 percent of spot, respectively. The second case,
, considers 0.000001 percent spread of the spot price. For example, if the spot price is 10000 dollars, then the spread is one cent. This means that liquidity risk causes an additional hedge cost for the dynamic hedging that is, we need more asset and funding money. This comparison result is reasonable in the sense that a higher liquidity cost produces a bigger option premium for the same spot price. Since the liquidity cost makes the hedging cost higher, an option price should be higher for a bigger liquidity cost. In addition, the CEV parameter provides a non-flat volatility risk. Therefore, the CEV option price should be higher than the Black-Scholes price. We observe this from the fact that the second column is larger than the first column.
Remark 1. For a practical application, we can apply our method as follows. From real market data, we observe two small parameters ϵ and θ. Then, we can apply the perturbation method for this problem. By applying the perturbation method, we can derive an approximation solution of option price with liquidity costs.
4.2. Convergence of the Series
In this subsection, we study the convergence of
Previously, we assumed that the existence of the series. However, to guarantee the existence of the series, we need to prove it. In this case, the existence of the series is equivalent to convergence of the series. Therefore, we show the convergence. Let
, then we have the following.
Theorem 5. For all , we have Proof. First, we show
. Note that
where
K is the exercise price. Moreover,
and
are
as
and bounded by
, since
for all
. By the probabilistic representation of
, we have
On the other hand, the integration formula of
implies that
and
,
are also
as
. Therefore, all of them are bounded and infinitely differentiable. By the same argument, we have the same result for
. Now, we apply the induction. Suppose that
for
,
and
and
are smooth and bounded. Then, we have
where
is a positive constant determined by
. Then,
On the other hand,
is a martingale under
. Let
. Then, by the Doob’s maximal inequality, we have
This implies that
. Moreover, the integration formula of
implies that
and
are also
as
. Therefore, by the induction argument, we have
for all
. □
By the above theorem, the series satisfies
for given
. We now define
. Clearly,
and
satisfies NPDE (
24) by (
28). Therefore, we can conclude that
and


{kind=link}