Abstract
We consider a decision-making problem to evaluate absolute ratings of alternatives from the results of their pairwise comparisons according to two criteria, subject to constraints on the ratings. We formulate the problem as a bi-objective optimization problem of constrained matrix approximation in the Chebyshev sense in logarithmic scale. The problem is to approximate the pairwise comparison matrices for each criterion simultaneously by a common consistent matrix of unit rank, which determines the vector of ratings. We represent and solve the optimization problem in the framework of tropical (idempotent) algebra, which deals with the theory and applications of idempotent semirings and semifields. The solution involves the introduction of two parameters that represent the minimum values of approximation error for each matrix and thereby describe the Pareto frontier for the bi-objective problem. The optimization problem then reduces to a parametrized vector inequality. The necessary and sufficient conditions for solutions of the inequality serve to derive the Pareto frontier for the problem. All solutions of the inequality, which correspond to the Pareto frontier, are taken as a complete Pareto-optimal solution to the problem. We apply these results to the decision problem of interest and present illustrative examples.
Keywords:
idempotent semifield; tropical bi-objective optimization; Pareto-optimal solution; constrained bi-criteria decision problem; pairwise comparisons MSC:
90C24; 15A80; 90B50; 90C29; 90C47
1. Introduction
This paper is concerned with an application of tropical algebra to a bi-criteria decision problem of rating alternatives by pairwise comparisons. Tropical (idempotent) algebra deals with the theory and applications of algebraic systems with idempotent operations, typically defined as taking the maximum and minimum of two arguments. Since the first publications in 1950–1960s, models and methods of tropical mathematics have found increased use in solving various problems in operations research, computer science and other fields. Rapid advances in the area are demonstrated in many published works, including the recent monographs and textbooks [1,2,3,4,5,6,7].
One of the current research directions in tropical mathematics are optimization problems which can be defined and solved in terms of tropical algebra. These problems are often formulated as the minimization or maximization of functions on idempotent semifields (algebraic systems with idempotent addition and invertible multiplication). For some notable applications, including time constrained project scheduling, minimax location problems with Chebyshev and rectilinear distances, and decision making through pairwise comparisons, tropical optimization can provide a direct complete solution that explicitly describes all solutions in a compact parametric form, ready for formal analysis and instant computations with a decent polynomial time complexity.
The problem of evaluating absolute ratings (priorities, scores, weights) of alternatives (choices, decisions, possibilities) from the results of their pairwise comparisons according to several criteria is of great practical importance in multi-criteria decision making [8,9]. The most commonly used approaches to handle this problem in terms of conventional mathematics are the Analytical Hierarchy Process (AHP) method, developed by T. L. Saaty [8,10], and the Weighted Geometric Means (WGM) method [11,12]. The AHP method is based on a heuristic procedure that provides a numerical solution whose accuracy is normally accepted by practitioners, but optimality cannot be theoretically guaranteed. The WGM method offers an analytical result in a rather simple form, which proves to be a Pareto-optimal solution and thus is formally justified as optimal. Both methods, however, can hardly be used or extended to obtain all Pareto-optimal solutions of the pairwise comparison problem, which are of particular interest in multi-criteria optimization.
The existing literature on the multi-criteria pairwise comparison problem, which presents a variety of solution methods and application examples, mainly focuses on unconstrained problems where no specific restrictions are imposed on the values of ratings under evaluation. At the same time, increasing complexity of contemporary decision-making processes, including decision models, methods and operating conditions, calls for the development of new decision approaches to take into account possible conditions on the ratings, such as order relations or box constraints fixed in advance.
In the framework of tropical algebra, the problem of rating alternatives by pairwise comparisons is examined in a range of papers, including [13,14,15,16,17]. A new approach is proposed in [18,19,20,21], which offers a direct complete solution in an explicit parametric form. Specifically, a tropical analogue of the AHP is developed in [19,21], and a constrained single-criterion problem is solved in [18]. For an unconstrained bi-criteria problem, a complete Pareto-optimal solution is obtained in [20].
In this paper, we consider a new decision-making problem of rating alternatives through pairwise comparisons according to two criteria, subject to constraints on the ratings. In practice, the pairwise comparison data normally come from human judgments of experts (analysts, specialists, referees) or non-experts (customers, consumers, users), whereas the constraints result from conditions and limitations, which are inherent in the nature of alternatives or the decision-making process.
We follow the general solution scheme proposed in [20] to solve the bi-criteria problem without constraints. This scheme is further extended below to develop a new general solution that accommodates constraints in an efficient way. We start with the formulation of the problem as a bi-objective optimization problem of constrained matrix approximation in the Chebyshev sense in logarithmic scale (log-Chebyshev approximation). The problem is to approximate the pairwise comparison matrices for each criterion simultaneously by a common consistent matrix of unit rank, which determines the vector of ratings.
Furthermore, we represent and solve the optimization problem in the tropical algebra setting. The solution approach involves the introduction of two parameters that represent the minimum values of the approximation error for each matrix and thereby describe the Pareto frontier for the bi-objective problem. The optimization problem then reduces to a parametrized vector inequality. The necessary and sufficient conditions for solutions of this inequality serve to derive the Pareto frontier for the optimization problem. All solutions of the inequality, which correspond to the Pareto frontier, are taken as a complete Pareto-optimal solution of the optimization problem.
The rest of the paper proceeds as follows. In Section 2, we describe and discuss the bi-criteria decision-making problem of interest, which motivates the study. Section 3 offers a brief overview of basic facts about tropical algebra, which are used in the subsequent solutions. (This section can be skipped by readers familiar with the subject and notation.) Section 4 provides a complete Pareto-optimal solution to a constrained bi-objective tropical optimization problem in an exact analytical form. We apply the result obtained to the decision-making problem under consideration and present illustrative examples in Section 5. Section 6 includes some concluding remarks.
2. Constrained Bi-Criteria Decision Problem
The purpose of this section is to describe and discuss the decision-making problem which serves to motivate and illustrate the study. Suppose that one needs to evaluate alternatives in a decision-making process of selecting alternatives according to their ratings. Given relative results of pairwise comparison of alternatives on a continuous scale, obtained with respect to two criteria, the problem is to derive absolute ratings of alternatives, subject to constraints imposed on the ratings. The problem of rating alternatives dates back to the classical work by L. L. Thurstone [22] in the first part of the last century, and since that time has been the subject of numerous investigations.
2.1. Unconstrained Pairwise Comparisons under Single Criterion
Assume that n alternatives are compared in pairs under a single criteria, which results in a pairwise comparison matrix , where the entry indicates that alternative i is times superior (more preferred) than j. The entries of satisfy the equality , and thus this matrix is positive and symmetrically reciprocal.
A pairwise comparison matrix is called consistent if its entries possess the transitivity property , which corresponds to the natural transitivity of judgments. If the matrix is consistent, then there exists a unique (up to a positive factor) positive vector , which determines the entries of by the conditions . It follows from these conditions that the entries of directly specify the individual ratings of alternatives and hence completely solve the problem of interest.
However, the pairwise comparison matrices, which are encountered in real-world problems, are commonly not consistent due to various cognitive or technical limitations of the comparison process. To overcome this difficulty, several techniques [8,23,24], which range from various heuristic procedures to matrix approximation, are used to replace a given inconsistent matrix of pairwise comparisons by a consistent matrix that is close to in some sense. Since the matrix is completely determined by a vector of individual ratings, these techniques typically concentrate on the direct derivation of the vector rather than of the matrix .
The heuristic solutions are often based on different schemes of aggregating columns in the pairwise comparison matrix, such as the method of weighted column sums [24]. A commonly used technique of deriving weights from pairwise comparisons is the principal eigenvector method [8,10,25]. The method exploits the principal (Perron) eigenvector of the pairwise comparison matrix as a vector of ratings. Despite the wide applications of the principal eigenvector method and many convincing arguments presented in favor of this method, it cannot guarantee, in a mathematically strict sense, that the solution obtained is optimal.
In contrast to the heuristic methods, the techniques that derive approximating matrices by minimizing a distance between matrices (approximation error) offer a commonly accepted and mathematically justified approach to the problem. The available procedures differ according to distance functions and measurement scales used to evaluate the approximation error. The application of Euclidean (Frobenius), rectilinear (Manhattan) and Chebyshev metrics on the standard linear scale in approximation of pairwise comparison matrices normally results in complicated multiextremal nonlinear optimization problems that are hard to solve [23,24], and thus has no wide use.
The approximation in logarithmic scale with logarithm to a base greater than one leads to optimization problems that can usually be solved numerically by an appropriate computational algorithm, and, in some cases, analytically [12,23,24,26]. Minimization of the Euclidean distance in logarithmic scale (log-Euclidean approximation) offers a unique (up to a positive factor) solution, which is given parametrically in an exact analytical form. Due to the simplicity of solution and the rigorous formal justification, the log-Euclidean approximation finds extensive application in rating alternatives from pairwise comparisons, where it is known as the method of geometric means.
Both rectilinear and Chebyshev approximation in logarithmic scale can be reduced by an appropriate transformation to solving linear programs using one of the computational algorithms available in linear programming. This algorithmic approach, however, cannot provide the derivation of a complete analytical result that allows describing all solutions in a direct explicit form.
The implementation of log-Chebyshev approximation involves minimizing the maximum absolute differences between the logarithms of the corresponding entries of a pairwise comparison matrix and consistent matrix by solving the problem to
Note that this problem can be reduced to an equivalent problem in the same variables, which does not involve logarithms (see, e.g., [20,21]). Indeed, representing the absolute value function as the maximum of two opposite values, using the monotonicity of the logarithm and the condition turn the objective function into
Moreover, the monotonicity property allows replacing the minimization of the logarithm by minimizing its argument, and therefore, the problem of log-Chebyshev approximation of at (1) reduces to finding positive vectors that
A solution approach to handle problem (2) is proposed in [18,19,21] in the framework of tropical algebra. Using this approach, a complete analytical solution is derived, which describes all solution vectors in a compact parametric form.
2.2. Constrained Pairwise Comparisons under Two Criteria
Suppose now that n alternatives are compared in pairs according to two (unweighted) criteria to produce two pairwise comparison matrices and . The problem of rating alternatives takes the form of finding a common consistent matrix that is close to (or approximates) both matrices and simultaneously. The new problem has two objectives that, in general, are in conflict, and thus requires the application of multi-objective optimization techniques.
A wide accepted approach to solve the multi-criteria problems of pairwise comparisons uses the AHP decision method [8,10], which is based on the principal eigenvector calculation. In the case of the bi-criteria problem in question, the method produces a unique numerical solution in the form of the sum of normalized principal eigenvectors of the matrices and (taken with equal weights). Another approach follows the WGM method [11,12], which offers a unique analytical result, where the elements of the vector of ratings are calculated by multiplying the corresponding row geometric means of pairwise comparison matrices and taking square roots of the results.
A solution in terms of tropical algebra that, which applies the log-Chebyshev approximation and provides a direct analytical representation of the result, is developed in [18,19,21]. The solution uses a scalarization technique to reduce the vector-valued bi-criteria problem to a single criterion problem in the form of (2) with the matrix replaced by the matrix , where .
Since no single solution generally exists to satisfy all objectives simultaneously, the solutions, which yield the best compromise between objectives, are normally of primary interest in multi-objective problems. A common approach to obtain the best compromising solution is to derive a set of Pareto-optimal (Pareto-efficient, non-dominated) solutions at which none of the objectives can be improved without making another objective worse [27,28,29,30]. In bi-objective problems, the image of the Pareto-optimal set, referred to as the Pareto frontier, can often be visualized as a trade-off curve in the plane of objectives, and used to describe all Pareto-optimal solutions [31].
In the framework of log-Chebyshev approximation, the bi-criteria problem of pairwise comparisons takes the form of the bi-objective optimization problem
which has a complete Pareto-optimal solution given in the tropical algebra setting in [20], where the solution set is explicitly described in a parametric vector form.
Let us now assume that the absolute ratings of alternatives must satisfy additional constraints, which restrict possible relations between individual ratings. These constraints may utilize prior knowledge or reflect approved and adopted results of previous studies, which are independent of the current comparison data. Specifically, an alternative can be known a priori to be preferable to another by virtue of all aspects of comparison, regardless of subjective judgments.
As an example, consider the problem of reconstruction of a total order on a set of alternatives, where the information on relations between some elements is unknown (lost, hidden, deteriorated) to make the set partially ordered. A reasonable way to restore the total order is to estimate the ratings of alternatives from pairwise comparisons (provided, for instance, by one or more experts), while preserving the known relations in the form of constraints on the ratings. The order is then defined by the ranks of alternatives, deduced from ratings obtained by solving this constrained problem.
Another illustration is a two-stage procedure of evaluating alternatives, which is to combine the outcome of both stages in such a way that some results of the first stage override the results of the second. Suppose that the first stage separates the set of alternatives into groups according to an important property. For example, the set can be divided into the groups of relatively low, medium and high estimated costs incurred by taking the alternatives. The group affiliation is considered as the dominant criterion and can be represented by constraints, which involves that the ratings of alternatives of the first group are not less than those of the second, and the ratings of the second are not less than the third. At the second stage, the ratings of all alternatives are evaluated using pairwise comparisons by experts according to criteria other than and independent of cost levels (the information about the costs may be confidential and hidden from the experts). The final ratings are derived from the results of pairwise comparisons under the constraints imposed by group affiliation.
Given real numbers , the constraints can be represented by the inequalities
where specifies that the rating of alternative i must be not less than times the rating of j. The value indicates that the rating of i is not less than j, whereas shows that no lower bound is defined on the rating of i with respect to j. Combining the inequalities for all j into one yields
The bi-objective problem now turns into the next problem: given symmetrically reciprocal matrices and , and non-negative matrix , find a positive vector to
In the subsequent sections, a complete Pareto-optimal solution of problem (3) is derived in a direct parametric form in terms of tropical algebra.
3. Preliminary Algebraic Definitions and Results
We start with a brief overview of main definitions, basic facts and preliminary results of tropical algebra, based mainly on [32,33,34], to provide a formal framework to the solution of the bi-objective optimization problem in what follows. For further details on tropical mathematics and its applications, one can consult, for example, the monographs and textbooks [1,2,3,4,5,6,7].
3.1. Idempotent Semifields
Consider a set that is closed under operations ⊕ (addition) and ⊗ (multiplication), and includes their neutral elements (zero) and (one). An algebraic structure is called an idempotent semifield if is a commutative idempotent monoid (semilattice), is an Abelian group, and multiplication ⊗ distributes over addition ⊕.
For each in the semifield, its multiplicative inverse is denoted by . The power notation with integer exponents specifies iterated products defined for each and integer as , , , . (Here and hereafter the multiplication sign ⊗ is, as usual, omitted for the sake of brevity.) The equation is assumed to have a unique solution x for any and integer , which extends the power notation to rational exponents.
Idempotent addition introduces a partial order on by the rule: if and only if . With this order, both addition and multiplication are monotone in each arguments, which means that the inequality yields the inequalities and for . Exponentiation is monotone: the inequality results in if , and if for . Addition possesses the extremal property (the majority law) that and . Finally, the inequality is equivalent to the pair of inequalities and .
In what follows, the above partial order is assumed extended to a linear order to make the semifields under consideration totally ordered.
A typical example of the idempotent semifield is the system , where is the set of non-negative reals. This semifield, which is often called the max-algebra, has addition defined as maximum, and multiplication as usual. The zero and one respectively coincide with the arithmetic 0 and 1, the power notation and the notion of inversion have the ordinary interpretation, and the order induced by idempotent addition corresponds to the natural linear order on .
3.2. Matrices and Vectors
Matrices over are introduced in the ordinary way. The set of matrices with m rows and n columns is denoted . A matrix with all entries equal to is the zero matrix denoted by . A matrix without zero columns is called column-regular.
Matrix operations follow the conventional rules with the arithmetic addition and multiplication replaced by ⊕ and ⊗. The scalar inequalities which represent properties of scalar operations extend to the matrix operations, where the inequalities are interpreted entry-wise.
Consider square matrices of order n from . A matrix with all diagonal entries equal to and the non-diagonal entries to is the identity matrix .
The power notation with non-negative integer exponents specifies repeated multiplication of a matrix by itself, and is defined as and for any matrix and integer .
The trace of a matrix is given by and possesses usual properties, including its invariance under cyclic permutations of matrices.
For any matrix , a tropical analogue of matrix determinant is a function given by
Provided that , the asterate operator (Kleene star) is defined as
A matrix with one column (row) is a column (row) vector. The set of column vectors of order n is denoted by . All vectors below are column vectors if not explicitly transposed. A vector with all elements equal to is the zero vector denoted . A vector without zero elements is called regular.
Conjugate transposition of a nonzero vector yields the row vector , where if , and otherwise. A vector is collinear with if for some .
A scalar is an eigenvalue of a matrix if there exists a nonzero vector , called an eigenvector of , such that . The maximum eigenvalue (with respect to the order induced by idempotent addition) is called the spectral radius of the matrix and calculated as
The zero and identity matrices over the max-algebra have the same form as in conventional linear algebra. The matrix and vector operations are performed in by the standard rules with the arithmetic addition replaced by the maximum operation. The regular vectors are positive vectors.
3.3. Vector Inequalities
We now describe preliminary results that play a key role in the solution of the bi-objective tropical optimization problem in the next section. First assume that, given a matrix and a vector , we need to solve, with respect to the unknown vector , the inequality
This inequality has a well-known solution that is available in various forms (see, e.g., [1]). In what follows, we use the solution provided by the following statement [32].
Lemma 1.
For any column-regular matrix and regular vector , all solutions of inequality (4) are given by the inequality .
Next suppose that, for a given square matrix , we seek to find regular vectors to satisfy the inequality
To solve the problem, we apply the next result, which is obtained in [32,33] and offers a complete solution of the inequality in a parametric form.
Theorem 1.
For any square matrix , the following statements hold.
- 1.
- 2.
- If , then there is only the trivial solution .
Note that this theorem describes all regular solutions, if exist, as the set of regular vectors (the linear span) generated by the columns in the Kleene star matrix .
3.4. Identities for Traces
We conclude the overview with binomial identities for matrices and their traces, which allow to simplify subsequent algebraic manipulations. We start with an identity that is valid for any matrices and integer in the following form (see also [34]):
Taking the trace of both sides, using the permutation-invariant property of traces to change the order of matrix factors, and renaming the indices yield
After summing over , and rearranging terms, we have the identity
4. Constrained Bi-Objective Optimization Problem
In this section, we offer a complete Pareto-optimal solution to a constrained bi-objective optimization problem, which is formulated in terms of an arbitrary tropical semifield and solved under rather general conditions. Suppose that, given matrices , the problem is to find regular vectors that
Before solving the problem, we note that, by Theorem 1, the inequality constraint has nontrivial solutions only under the condition , which we have to take as a necessary assumption.
To describe the solution in a compact form, we use the following notation. For any matrices , we denote the spectral radii of the matrices and as
and introduce the scalars
Next, for any , and , we denote
Finally, we define, for any , the functions
We observe that both functions G and H monotonically decrease as their arguments increase. Moreover, the equality is equivalent to , and thus these functions are inverse to each other. Suppose the equality is valid. This equality is equivalent to the system
where at least one inequality holds as an equality. The solution of these inequalities for s yields
By combining these inequalities, one of which is an equality, we obtain .
As a consequence, we also see that the inequalities and are dual in the sense that the solution of one of them is given by the other and vice versa.
We are now in a position to formulate and proof the main result of the paper.
Theorem 2.
Let and be matrices with respective spectral radii and , and be a matrix with . Then, the following statements hold.
Proof.
Fix an arbitrary solution vector and denote the corresponding values of the objective functions and in the Pareto frontier of the problem by and respectively. The solution is then given by the parametrized system
Since the parameters and are assumed to take minimum values that cannot be improved, the set of solution vectors does not change if the equalities are replaced by the inequalities and . Furthermore, we use Lemma 1 to solve the first inequality with respect to and the second with respect to , and then rearrange the parameters. The system now becomes
Finally, we combine the inequalities of the system into one parametrized inequality
By Theorem 1, this inequality has regular solutions if and only if the following condition holds:
Under this condition, all regular solutions are given in the parametric form
Then, the existence condition is equivalent to the system of inequalities
We now solve these inequalities with respect to the parameters and . The first inequality can be replaced by the inequalities
After solving these inequalities for and combining the results, we have
The inequality under examination reduces to the system
where the inequality holds by the assumption of the theorem.
Solving the first and third inequality in the same way as above, we obtain
Finally, we consider the matrix product under the trace operator on the left-hand side of the third inequality at (14). We expand the product by taking the first and then the second summand in each term to obtain the sum of products for all such that .
The trace under summation on the left-hand side of the inequality takes the form
After substitution of this expression, we use the symbol to rewrite the inequality as the system of two inequalities
The solution of the first inequality with respect to and the second to yields
Finally, we combine all inequalities obtained for and into the following system:
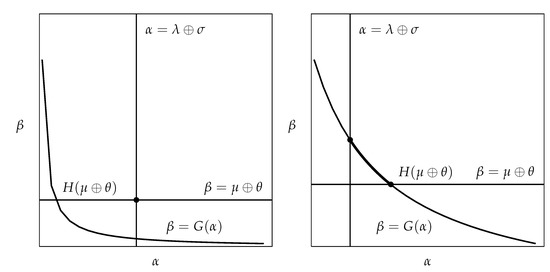
Taking into account that decreases as increases, we see that this system defines an area on the -plane that is bounded from the left and from below by the lines and , and lies above the graph of the function .
To describe the Pareto frontier for the problem, we note that any interior point of the area can be improved and hence cannot belong to the frontier. For the same reason, the left and bottom boundary half-lines cannot be parts of the frontier, except for their bottommost and leftmost points. Both points may coincide in the single point if the graph of lies below this point, or be the ends of a segment that is cut out from the graph by the lines and otherwise.
An illustration is given in Figure 1, where the frontier is indicated by a thick dot (left) or depicted by a thick segment between two thick dots of a curve (right).
Figure 1.
Examples of Pareto frontier in the form of a single point (left), and of a segment (right).
We consider two cases and initially suppose the following condition holds:
This condition and the first inequality at (15) lead to the inequality , which is equivalent to the dual inequality . The second inequality at (15) reduces to . As a result, the Pareto frontier shrinks to a single point where the parameters are fixed at
Substitution of these values for the parameters into (13) yields all corresponding Pareto-optimal solutions of the problem in this case.
We now examine the case that
Assume the parameter to satisfy the inequality , and note that the condition results in the inequality . Indeed, if the opposite inequality holds, then , which is a contradiction.
Since the second inequality at (15) then becomes , the Pareto frontier forms a non-linear segment given by and .
For all , the equality holds, and thus . The Pareto frontier degenerates to the point with and .
Observing that , we combine the results to represent the frontier as
A complete Pareto-optimal solution takes the general form defined by (13). □
Let us set in problem (7), which makes the constraint trivially hold for any . As a result, this problem becomes the unconstrained problem
A complete solution of problem (16) can be obtained as a formal consequence of the solution of (7) as follows. First note that, under the condition , we have and .
Furthermore, we see that only when . Then, for any and , we introduce equal to , and write
Finally, we redefine, for any , the functions
With the condition and new notation, the solution of problem (7) given by Theorem 2 reduces to a solution of (16) in the form of the next result.
Corollary 1.
Let and be matrices with respective spectral radii and . Then, the following statements hold.
This solution corresponds to that given in [20] for the unconstrained problem.
We conclude this section with an example of solution of a general two-dimensional problem, which illustrates in more detail the results obtained.
Example 1.
To apply Theorem 2, we need to reformulate the assumptions and statements of the theorem for the two-dimensional case. First, we calculate the matrix
The spectral radius of is similarly given by
Furthermore, with the matrix
we derive the tropical determinant of the matrix in the form
The assumptions of the theorem to be made about the matrices now take the form
Next, we adjust the statements of Theorem 2. To describe the conditions, we evaluate the matrix
and then apply (9) to write
In the same way, the evaluation of the matrix yields
It remains to refine the Kleene star matrix, which generates the solutions of the problem. Observing the assumption of the theorem, we have . Moreover, it follows from the statement of the theorem that and for . Then, we can represent the matrix as follows:
To rewrite the results of Theorem 2 in terms of the current problem, we consider two cases. If the condition holds, then the Pareto frontier of the problem is the point with
Otherwise, provided that , the Pareto frontier forms a segment that is defined as
The Pareto-optimal solution is given, using a parameter vector , by
Finally, assume that and are symmetrically reciprocal matrices, and is an upper triangular matrix, given in the framework of the max-algebra by
We see that the assumptions of Theorem 2 are fulfilled because
Furthermore, we calculate the matrices
and then find their traces
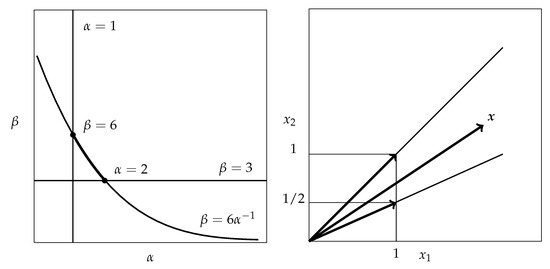
Since the condition holds, the Pareto frontier of the problem is the segment
All Pareto-optimal solutions are given by
After substitution of and some algebra, the generating matrix becomes
Observing that both columns in this matrix are collinear, we use the first one to represent all solutions as
Figure 2 offers a graphical illustration of the Pareto frontier shown by a thick segment (left), and the Pareto-optimal solution given by the cone formed by the vectors and , which correspond to the end points of the frontier (right).
Figure 2.
Pareto frontier (left) and Pareto-optimal solution (right).
5. Application to Constrained Bi-Criteria Decision Problem
Consider the bi-criteria decision problem at (3), and represent it in terms of the max-algebra as follows:
With the notation , , and , the vector objective function to minimize becomes
whereas the inequality constraints can be written as
After combining the objective and constraint, the problem takes the form of the optimization problem at (7), and thus has the solution given by Theorem 2.
Note that the conditions in the theorem on spectral radii and are trivially fulfilled for pairwise comparison matrices. The condition implies that the system of inequality constraints on ratings has nontrivial (positive) solutions.
We now present an example of application of Theorem 2 to a constrained bi-criteria decision problem with four alternatives. As a basis of the example, we take an unconstrained problem in [20] to use intermediate results of this problem to save writing. Then, we add constraints on ratings of alternatives, and construct a Pareto-optimal solution of the constrained problem obtained.
Example 2.
Consider a problem to evaluate ratings of alternatives from pairwise comparisons according to two criteria subject to constraints on the ratings. The matrices of comparisons and constraints are given by
The unconstrained version of the problem (with ) has a complete solution obtained in [20], where the Pareto frontier is derived as the segment
The corresponding Pareto-optimal solutions are given in the parametric form
which reduces, on the ends of the frontier with α set to and , to the vectors
Note that, in the constrained problem, the matrix produces only one nontrivial inequality , which means that the rating of alternative 2 must be not less than that of 4. Since the rating of alternative 2 is always less than or equal to that of 4 if no constraints are imposed, one can expect that the solution of the constrained problem will be the vector , at which the ratings of these alternatives become equal.
We start with evaluation of the spectral radii λ and μ given by (8) for the matrices and of order . By using the results obtained in [20], we can write
Similar computations yield
Consider the matrix of constraints , and note that
Since , we conclude that the assumptions of Theorem 2 are fulfilled.
To take into account the constraints, we apply (9) to evaluate the scalars σ and θ. By using properties of traces and eliminating terms that include powers of , we have
We form the matrices and then take their traces to obtain
In the same way, we calculate
Furthermore, we check whether the Pareto frontier of the constrained problem degenerates to a single point. We use (11) with to construct the function
To evaluate traces, we first form the matrices
Next, we apply these matrices to calculate
Evaluating the traces of the matrices obtained results in
Finally, we construct the function
We calculate , and . Since the equality is valid, it follows from Theorem 2 that the Pareto frontier shrinks to the point
whereas the solution is given by
Furthermore, we consider the matrix
and calculate its second and third powers
The Kleene star matrix, which generates the solutions, takes the form
Since all columns in this matrix are collinear, we take one of them, say the first, to write the solution as
Specifically, with , we have the vector of ratings .
Finally note that the obtained solution coincides with the vector from the solution set of the unconstrained problem in [20], which is in agreement with the prior assessment.
To conclude this section, we observe that the computational scheme demonstrated by the example mainly involves simple algebraic manipulations with matrices and their traces, which can be directly extended to decision problems with a greater number of alternatives (with matrices of higher order). At the same time, the extension of the solution to problems with three and more criteria leads to more complicated analytical technique, which needs to be further developed.
6. Conclusions
In this paper, we have developed a novel application of tropical (idempotent) algebra to solve a new bi-criteria problem of rating alternatives through pairwise comparisons, subject to constraints on the relative values of ratings. A complete set of Pareto-optimal solutions of the problem has been obtained analytically in a compact vector form ready for further analysis and computations. This result extends previous solutions of an unconstrained bi-criteria problem and a constrained single-criterion problem.
The new solution provides decision-makers with a direct description of all Pareto-optimal decisions that satisfy additional conditions (constraints), which allows to improve the quality and efficiency of decision making in conditional problems in practice. Application examples include the problem of pairwise comparisons that are used to restore the total order on a partially ordered set of alternatives, and the two-stage procedure of evaluating alternatives from pairwise comparisons, where results of the first stage can override the results of the second.
The proposed algebraic approach may serve to complement and supplement existing methods, including the heuristic numerical AHP method as well as well-justified analytical WGM method, which both find a single solution rather than derive all Pareto-optimal solutions of the multi-criteria decision-making problem under study. In addition, the results presented in the paper, demonstrate a strong potential of the approach to offer complete analytical solutions of pairwise comparison problems with various constraints, which are difficult to handle by existing techniques and are still not adequately addressed in the literature.
As a limitation of the approach, one can consider the complexity of the algebraic expressions in the analytical solution, which rapidly growths as the number of criteria increases. However, when the number of criteria is small (say, less than ten), we expect that appropriate application of computer algebra systems may help to overcome this difficulty.
We suggest future research that focuses on extending the results to bi-criteria problems with additional constraints and to problems with more than two criteria. The evaluation of computational complexity of the solution is also of interest.
Funding
This work was supported in part by the Russian Foundation for Basic Research grant number 20-010-00145.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data sharing not applicable.
Conflicts of Interest
The author declares no conflict of interest.
References
- Baccelli, F.L.; Cohen, G.; Olsder, G.J.; Quadrat, J.P. Synchronization and Linearity; Wiley Series in Probability and Statistics; Wiley: Chichester, UK, 1993. [Google Scholar]
- Kolokoltsov, V.N.; Maslov, V.P. Idempotent Analysis and Its Applications; Mathematics and Its Applications; Springer: Dordrecht, The Netherlands, 1997; Volume 401. [Google Scholar] [CrossRef]
- Golan, J.S. Semirings and Affine Equations Over Them; Mathematics and Its Applications; Springer: Dordrecht, The Netherlands, 2003; Volume 556. [Google Scholar] [CrossRef]
- Heidergott, B.; Olsder, G.J.; van der Woude, J. Max Plus at Work; Princeton Series in Applied Mathematics; Princeton Univeristy Press: Princeton, NJ, USA, 2006. [Google Scholar]
- McEneaney, W.M. Max-Plus Methods for Nonlinear Control and Estimation; Systems and Control: Foundations and Applications; Birkhäuser: Boston, MA, USA, 2006. [Google Scholar] [CrossRef]
- Gondran, M.; Minoux, M. Graphs, Dioids and Semirings; Operations Research/ Computer Science Interfaces; Springer: Boston, MA, USA, 2008; Volume 41. [Google Scholar] [CrossRef]
- Maclagan, D.; Sturmfels, B. Introduction to Tropical Geometry; Graduate Studies in Mathematics; AMS: Providence, RI, USA, 2015; Volume 161. [Google Scholar]
- Saaty, T.L. The Analytic Hierarchy Process, 2nd ed.; RWS Publications: Pittsburgh, PA, USA, 1990. [Google Scholar]
- Gavalec, M.; Ramík, J.; Zimmermann, K. Decision Making and Optimization; Lecture Notes in Economics and Mathematical Systems; Springer: Cham, Switzerland, 2015; Volume 677. [Google Scholar] [CrossRef]
- Saaty, T.L. On the measurement of intangibles: A principal eigenvector approach to relative measurement derived from paired comparisons. Not. Am. Math. Soc. 2013, 60, 192–208. [Google Scholar] [CrossRef]
- Crawford, G.; Williams, C. A note on the analysis of subjective judgment matrices. J. Math. Psych. 1985, 29, 387–405. [Google Scholar] [CrossRef]
- Barzilai, J. Deriving weights from pairwise comparison matrices. J. Oper. Res. Soc. 1997, 48, 1226–1232. [Google Scholar] [CrossRef]
- Elsner, L.; van den Driessche, P. Max-algebra and pairwise comparison matrices. Linear Algebra Appl. 2004, 385, 47–62. [Google Scholar] [CrossRef][Green Version]
- Elsner, L.; van den Driessche, P. Max-algebra and pairwise comparison matrices, II. Linear Algebra Appl. 2010, 432, 927–935. [Google Scholar] [CrossRef][Green Version]
- Gursoy, B.B.; Mason, O.; Sergeev, S. The analytic hierarchy process, max algebra and multi-objective optimisation. Linear Algebra Appl. 2013, 438, 2911–2928. [Google Scholar] [CrossRef]
- Tran, N.M. Pairwise ranking: Choice of method can produce arbitrarily different rank order. Linear Algebra Appl. 2013, 438, 1012–1024. [Google Scholar] [CrossRef]
- Goto, H.; Wang, S. Polyad inconsistency measure for pairwise comparisons matrices: Max-plus algebraic approach. Oper. Res. Int. J. 2020. [Google Scholar] [CrossRef]
- Krivulin, N. Rating alternatives from pairwise comparisons by solving tropical optimization problems. In Proceedings of the 2015 12th International Conference on Fuzzy Systems and Knowledge Discovery (FSKD); Tang, Z., Du, J., Yin, S., He, L., Li, R., Eds.; IEEE: Piscataway, NJ, USA, 2015; pp. 162–167. [Google Scholar] [CrossRef]
- Krivulin, N. Using tropical optimization techniques to evaluate alternatives via pairwise comparisons. In Proceedings of the 2016 Proc. 7th SIAM Workshop on Combinatorial Scientific Computing; Gebremedhin, A.H., Boman, E.G., Ucar, B., Eds.; SIAM: Philadelphia, PA, USA, 2016; pp. 62–72. [Google Scholar] [CrossRef]
- Krivulin, N. Using tropical optimization techniques in bi-criteria decision problems. Comput. Manag. Sci. 2020, 17, 79–104. [Google Scholar] [CrossRef]
- Krivulin, N.; Sergeev, S. Tropical implementation of the Analytical Hierarchy Process decision method. Fuzzy Sets Syst. 2019, 377, 31–51. [Google Scholar] [CrossRef]
- Thurstone, L.L. A law of comparative judgment. Psychol. Rev. 1927, 34, 273–286. [Google Scholar] [CrossRef]
- Saaty, T.L.; Vargas, L.G. Comparison of eigenvalue, logarithmic least squares and least squares methods in estimating ratios. Math. Model. 1984, 5, 309–324. [Google Scholar] [CrossRef]
- Choo, E.U.; Wedley, W.C. A common framework for deriving preference values from pairwise comparison matrices. Comput. Oper. Res. 2004, 31, 893–908. [Google Scholar] [CrossRef]
- Saaty, T.L. A scaling method for priorities in hierarchical structures. J. Math. Psych. 1977, 15, 234–281. [Google Scholar] [CrossRef]
- Portugal, R.D.; Svaiter, B.F. Weber-Fechner law and the optimality of the logarithmic scale. Minds Mach. 2011, 21, 73–81. [Google Scholar] [CrossRef]
- Ehrgott, M. Multicriteria Optimization, 2nd ed.; Springer: Berlin, Germany, 2005. [Google Scholar] [CrossRef]
- Luc, D.T. Pareto optimality. In Pareto Optimality, Game Theory and Equilibria; Chinchuluun, A., Pardalos, P.M., Migdalas, A., Pitsoulis, L., Eds.; Springer: New York, NY, USA, 2008; pp. 481–515. [Google Scholar] [CrossRef]
- Benson, H.P. Multi-objective optimization: Pareto optimal solutions, properties. In Encyclopedia of Optimization, 2nd ed.; Floudas, C.A., Pardalos, P.M., Eds.; Springer: Boston, MA, USA, 2009; pp. 2478–2481. [Google Scholar] [CrossRef]
- Pappalardo, M. Multiobjective optimization: A brief overview. In Pareto Optimality, Game Theory and Equilibria; Chinchuluun, A., Pardalos, P.M., Migdalas, A., Pitsoulis, L., Eds.; Springer: New York, NY, USA, 2008; pp. 517–528. [Google Scholar] [CrossRef]
- Ruzika, S.; Wiecek, M.M. Approximation methods in multiobjective programming. J. Optim. Theory Appl. 2005, 126, 473–501. [Google Scholar] [CrossRef]
- Krivulin, N. Extremal properties of tropical eigenvalues and solutions to tropical optimization problems. Linear Algebra Appl. 2015, 468, 211–232. [Google Scholar] [CrossRef]
- Krivulin, N. A multidimensional tropical optimization problem with nonlinear objective function and linear constraints. Optimization 2015, 64, 1107–1129. [Google Scholar] [CrossRef]
- Krivulin, N. Direct solution to constrained tropical optimization problems with application to project scheduling. Comput. Manag. Sci. 2017, 14, 91–113. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).