
Fault-Tolerance by Resilient State Transition for Collaborative Cyber-Physical Systems



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
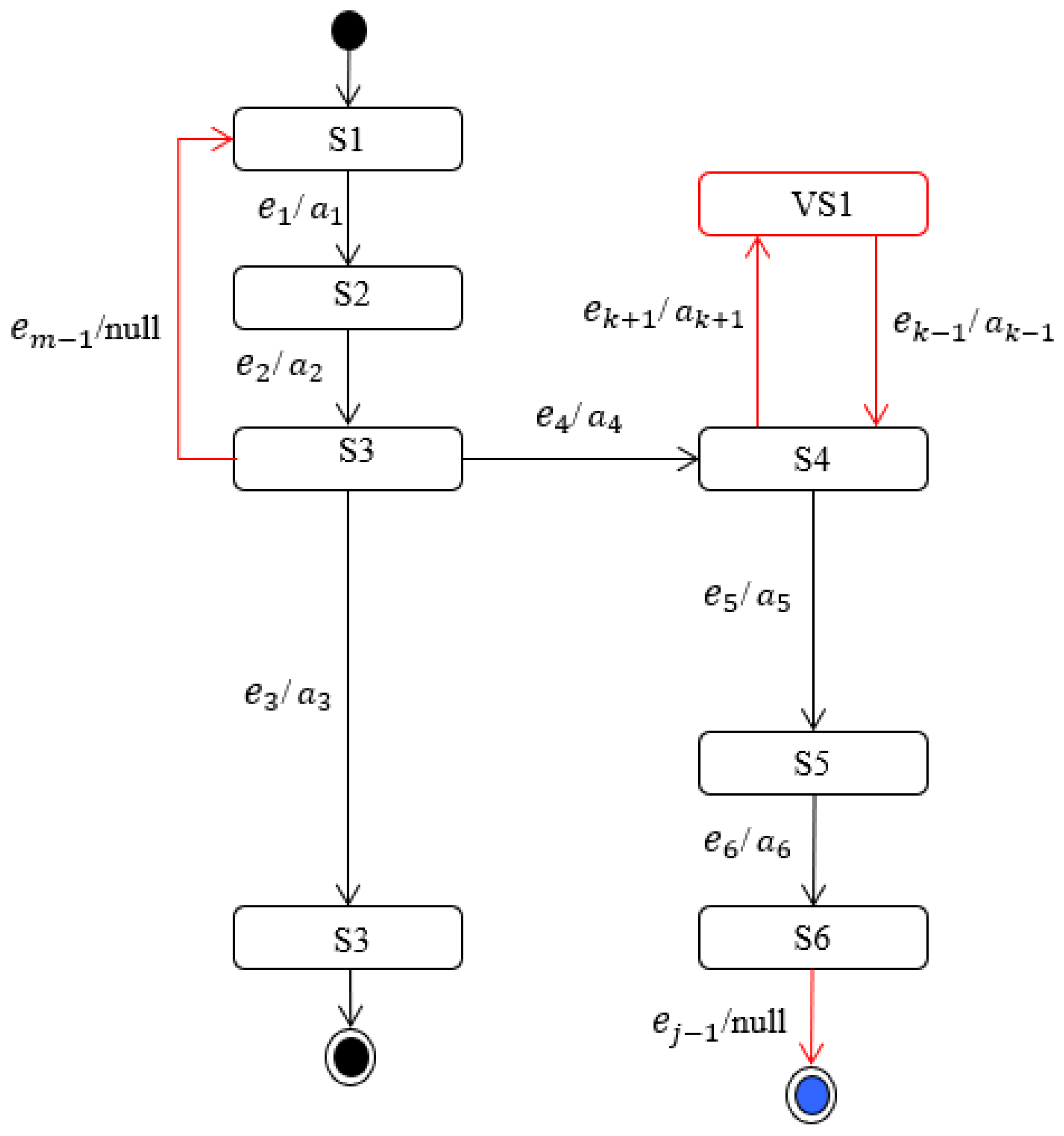
- We present a Resilient State Transition Diagram (R-STD) to ensure fault tolerance in an autonomous platooning system. R-STD is an extended version of the state machine diagram. In R-STD, additional elements such as failures, mitigation strategies, and safe exit machines are introduced to achieve resilience in the safety-critical system (e.g., autonomous platooning system).
- To validate our proposed approach, we present a case study on the autonomous platooning system. We modeled perception failures of the leader vehicle such as the failure caused by dense fog, communication failure, and ego-motion estimation failure using our proposed R-STD to see their effectiveness. Furthermore, VENTOS simulator [8] is used to verify the resulting resilient transitions of R-STD.
2. Related Work
3. Resilient State Transition Diagram
3.1. State Transition Diagram
3.2. Resilient State Transition Diagram
4. Proposed Approach
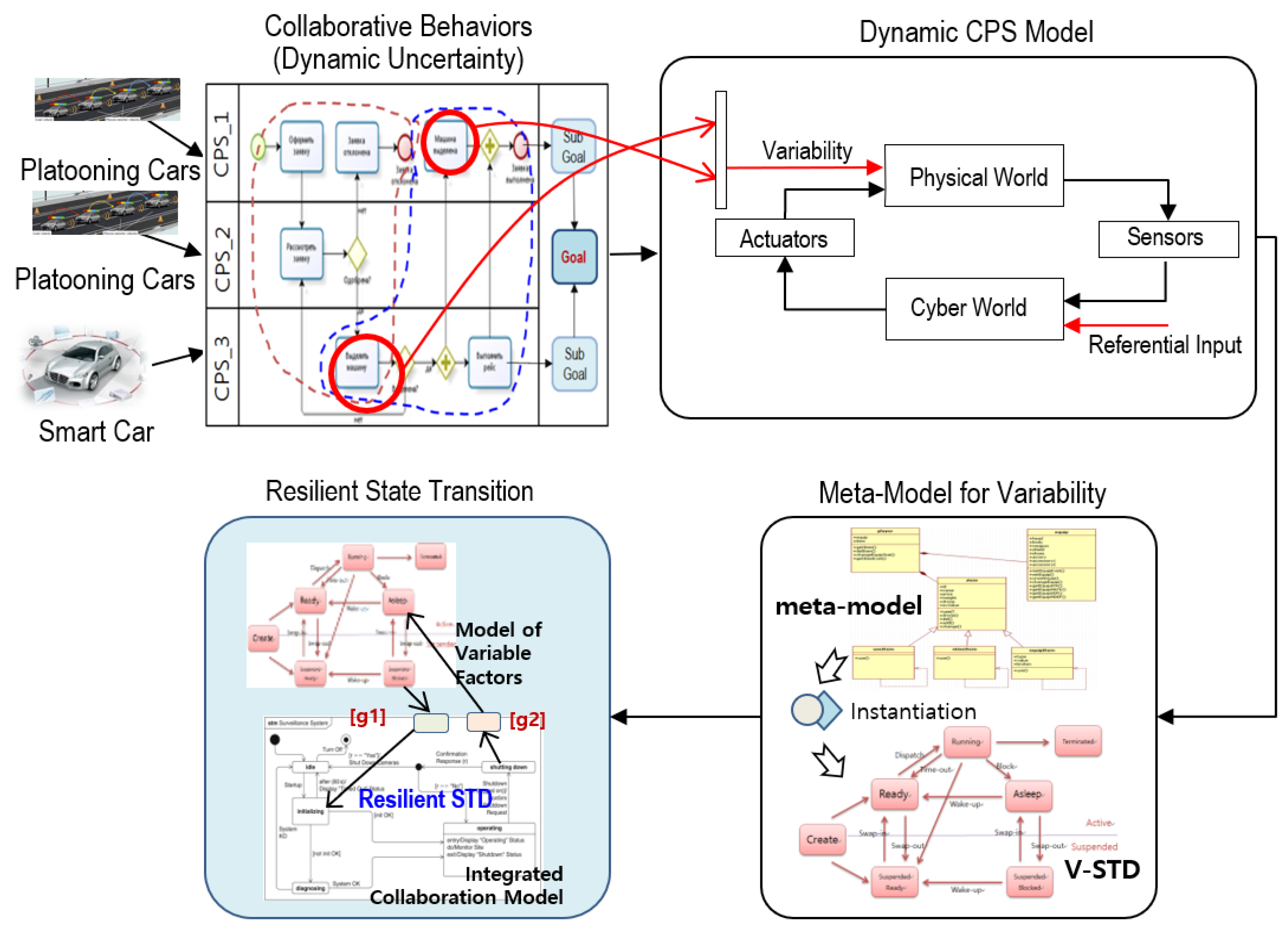
4.1. Collaborative Behavior of CPSs and Variability
4.2. Resilient State Transition for Variability
| Algorithm 1 Resilient state transition | |
| 1. | Start |
| 2. | S {s0, sb, sh, …, sm} where S0 is the initial state and sm is the final state |
| 3. | E {e1, e2, …, en} |
| 4. | A {a1, a2, …, an} |
| 5. | Ra {ra1, ra2, …, ran} where Ra is the resilient actions. |
| 6. | RS (rs1, rs2,, …, rsn) where Rs is the set of resilient states |
| 7. | Initialize s = 0, a = 1, e = 1 |
| 8. | If (en ∈ E & an ∈ A) |
| 9. | For ∀ en ∈ E & an ∈ A |
| 10. | If ∃ sn |
| 11. | Go to next state sn → sn ∈ S. |
| 12. | EndIf |
| 13. | EndFor |
| 14. | EndIf |
| 15. | Else |
| 16. | For ∀ en ∉ E |
| 17. | en is Etrigger |
| 18. | If (Etrigger) |
| 19. | ∃ ran ∀ en → rsn |
| 20. | Go to resilient state sn → sm ∈ RS |
| 21. | CreateVirtualState(VSm)||terminateProcess||goto initial state |
| 22. | EndIf |
| 23. | EndFor |
5. Proposed Approach
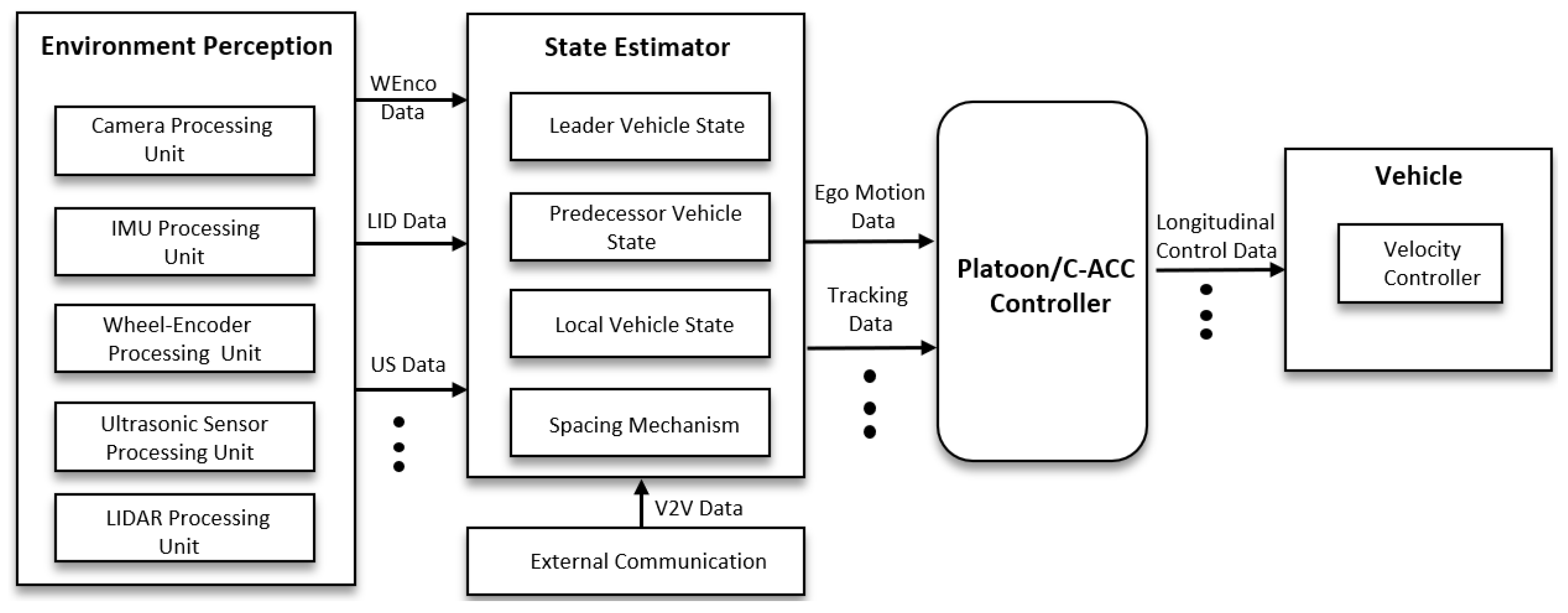
5.1. System Architecture
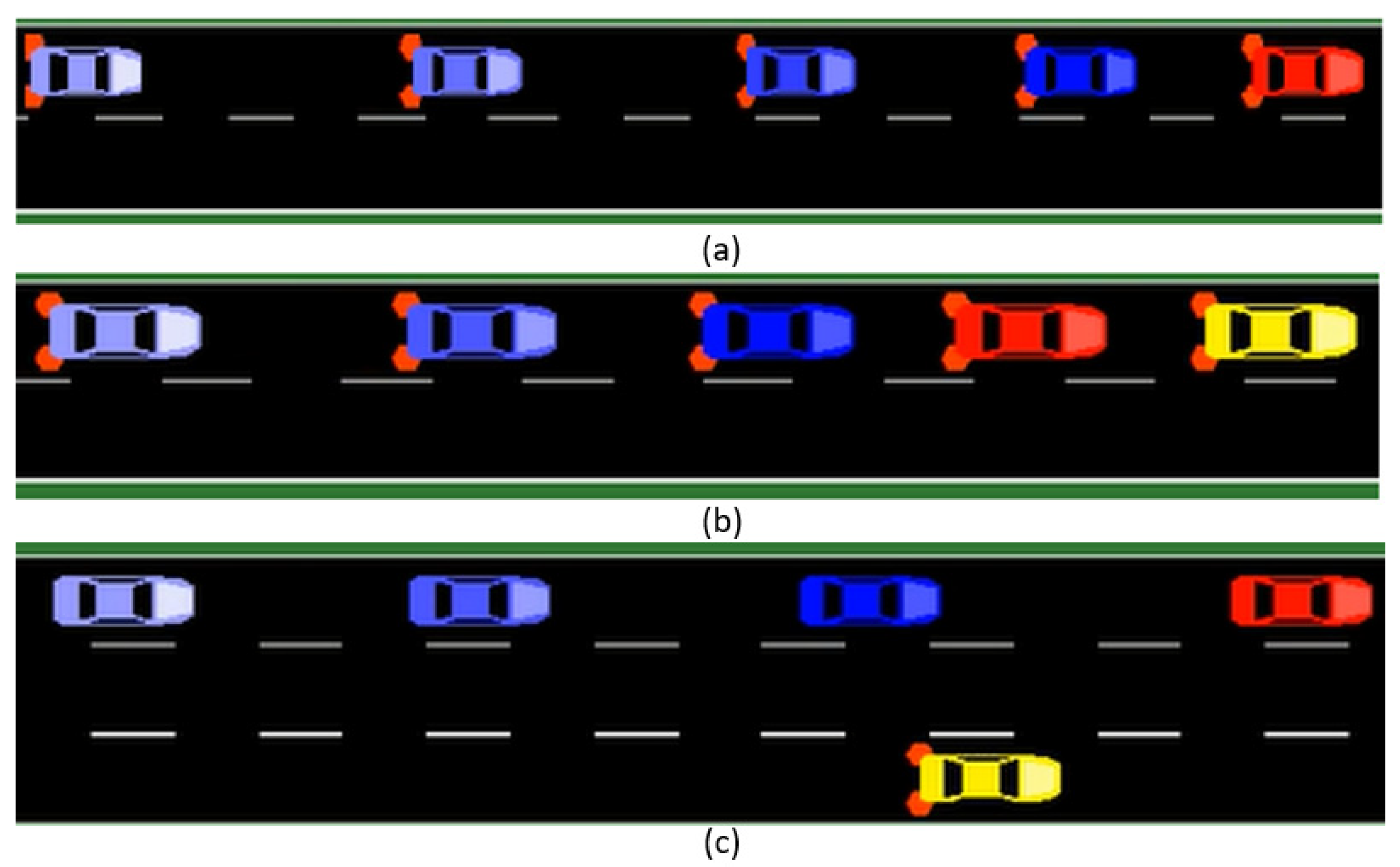
5.2. Normal and Hazardous Scenarios
5.3. Resilient State Transitions
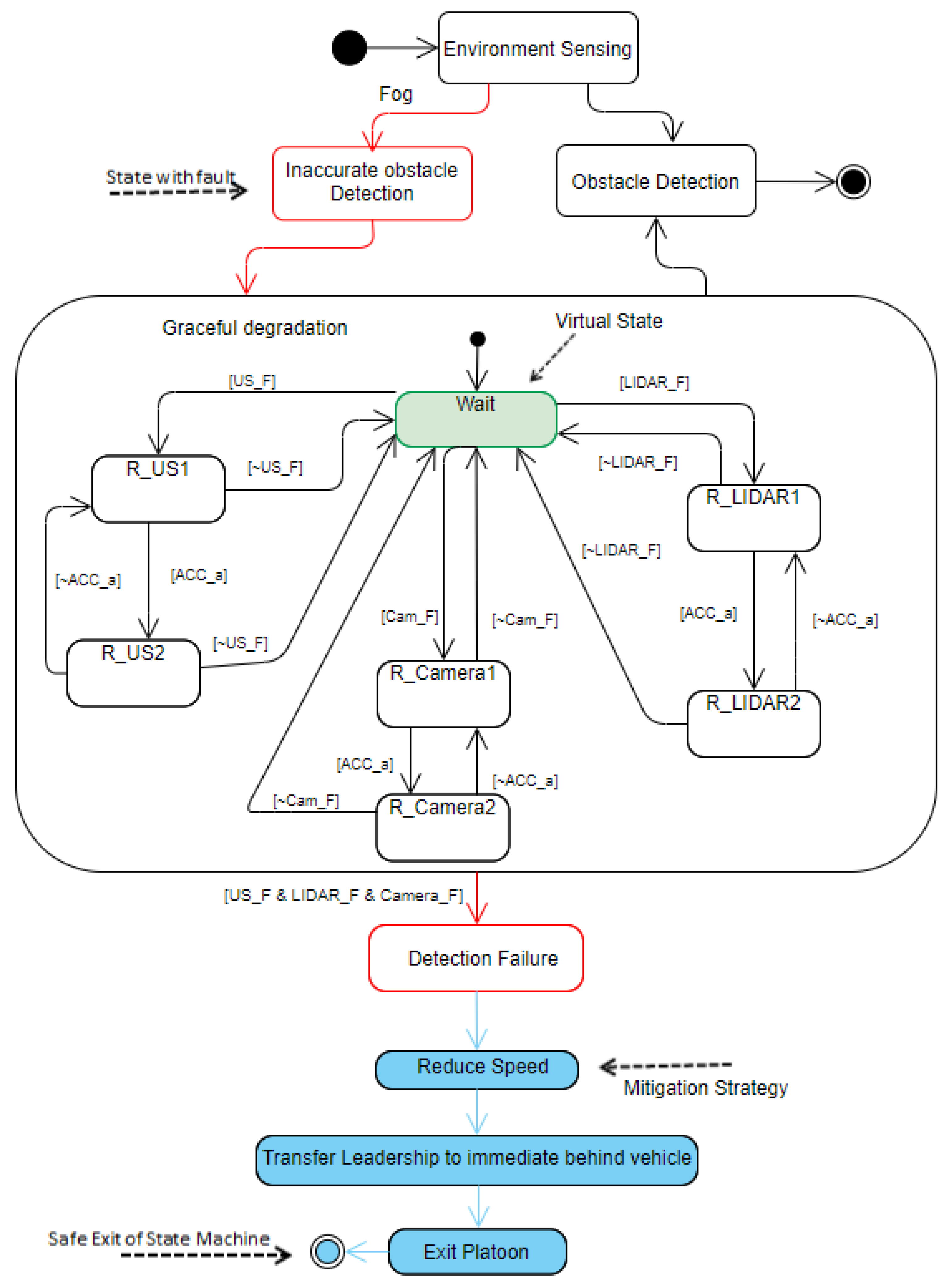
5.3.1. Environment Perception Failure Due to Fog
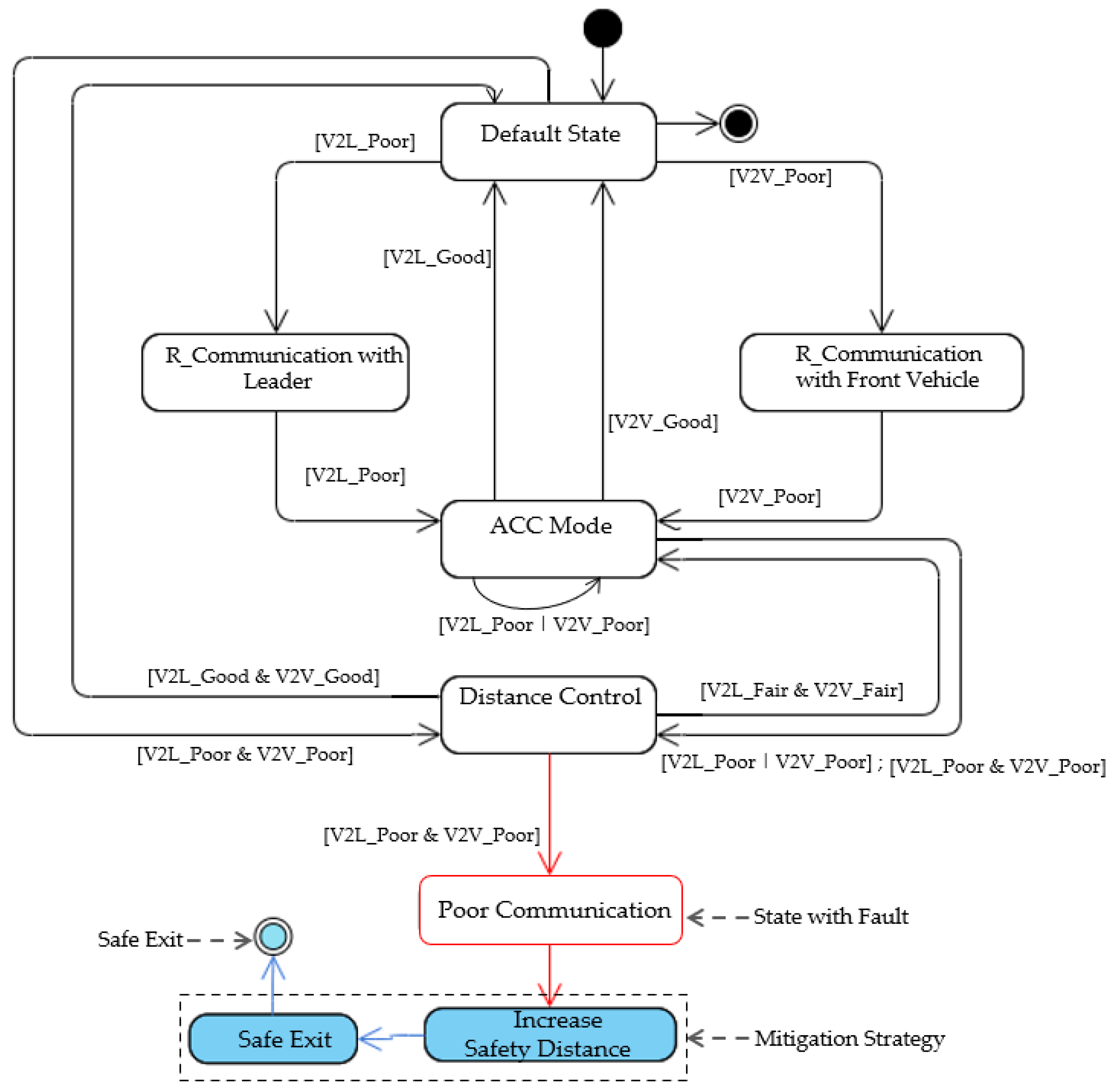
5.3.2. Communication Failure
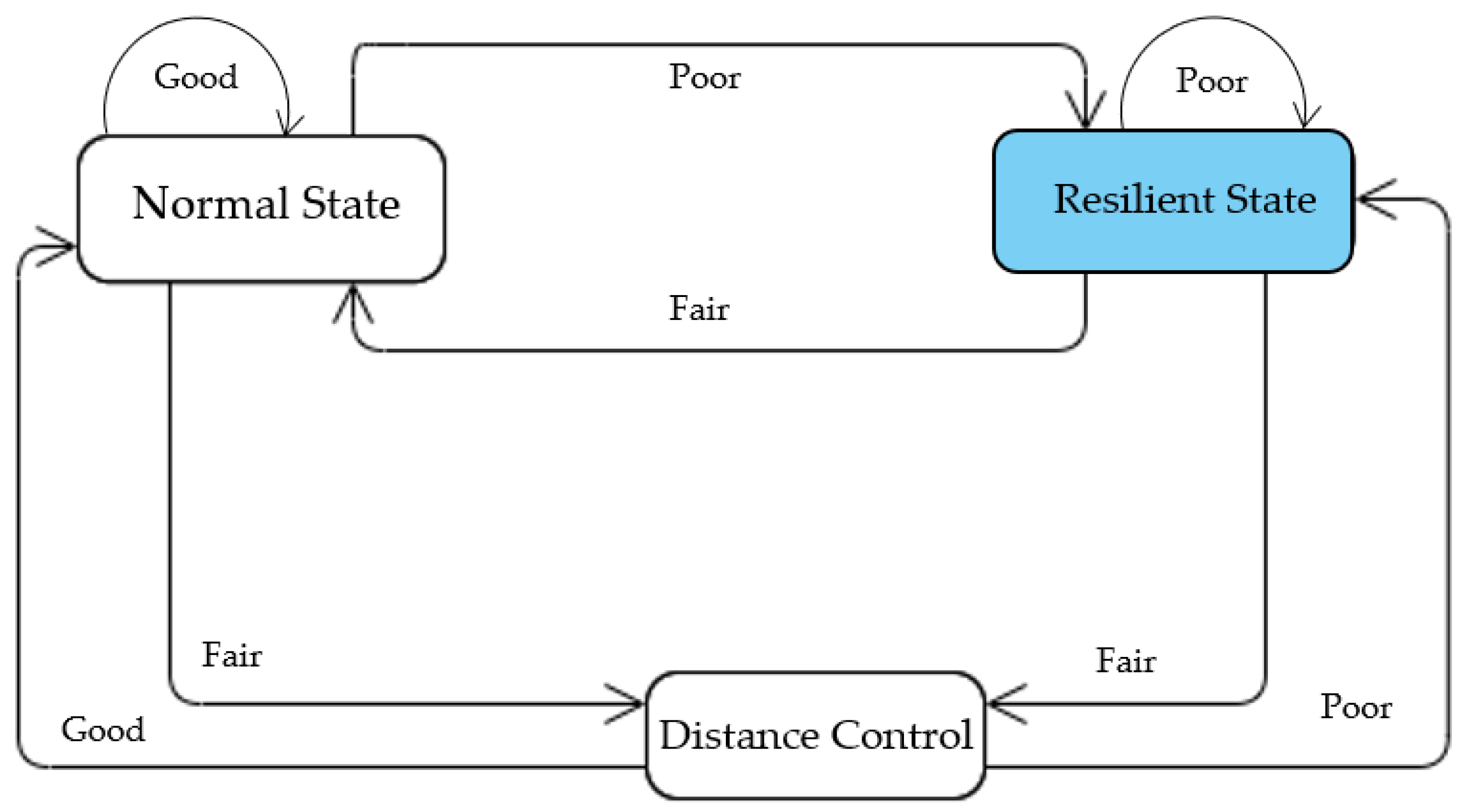
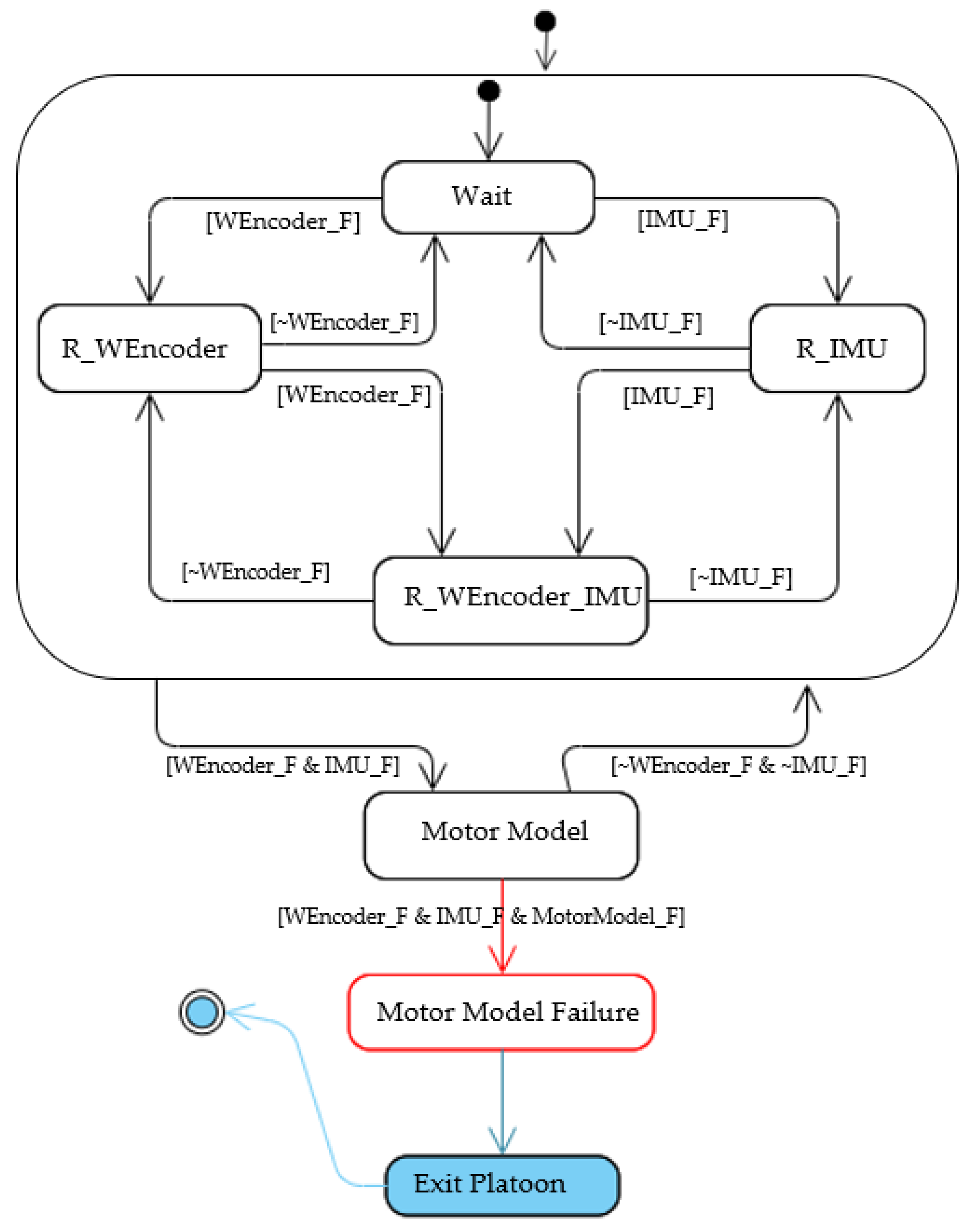
5.3.3. Estimating Ego-Motion Failure
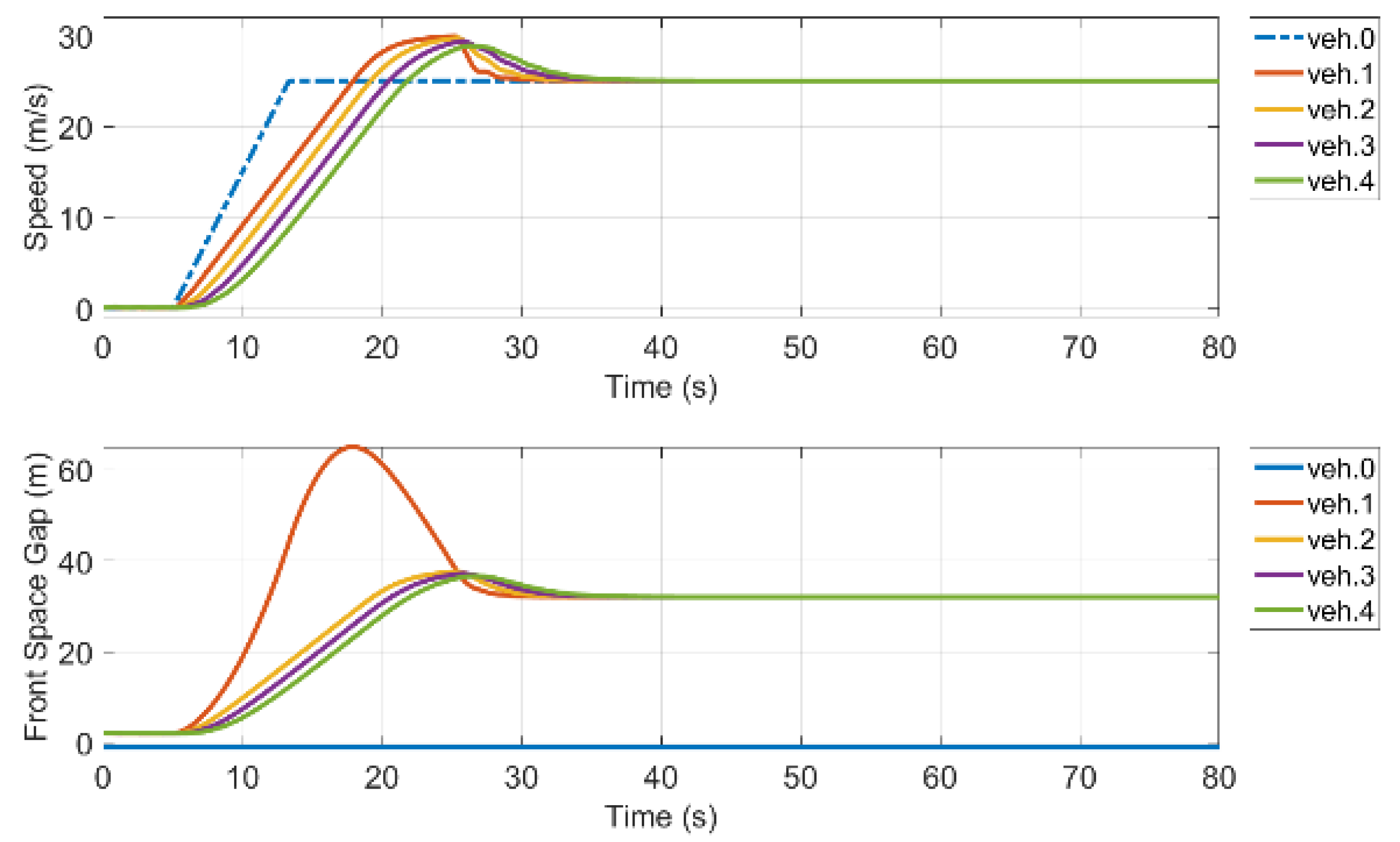
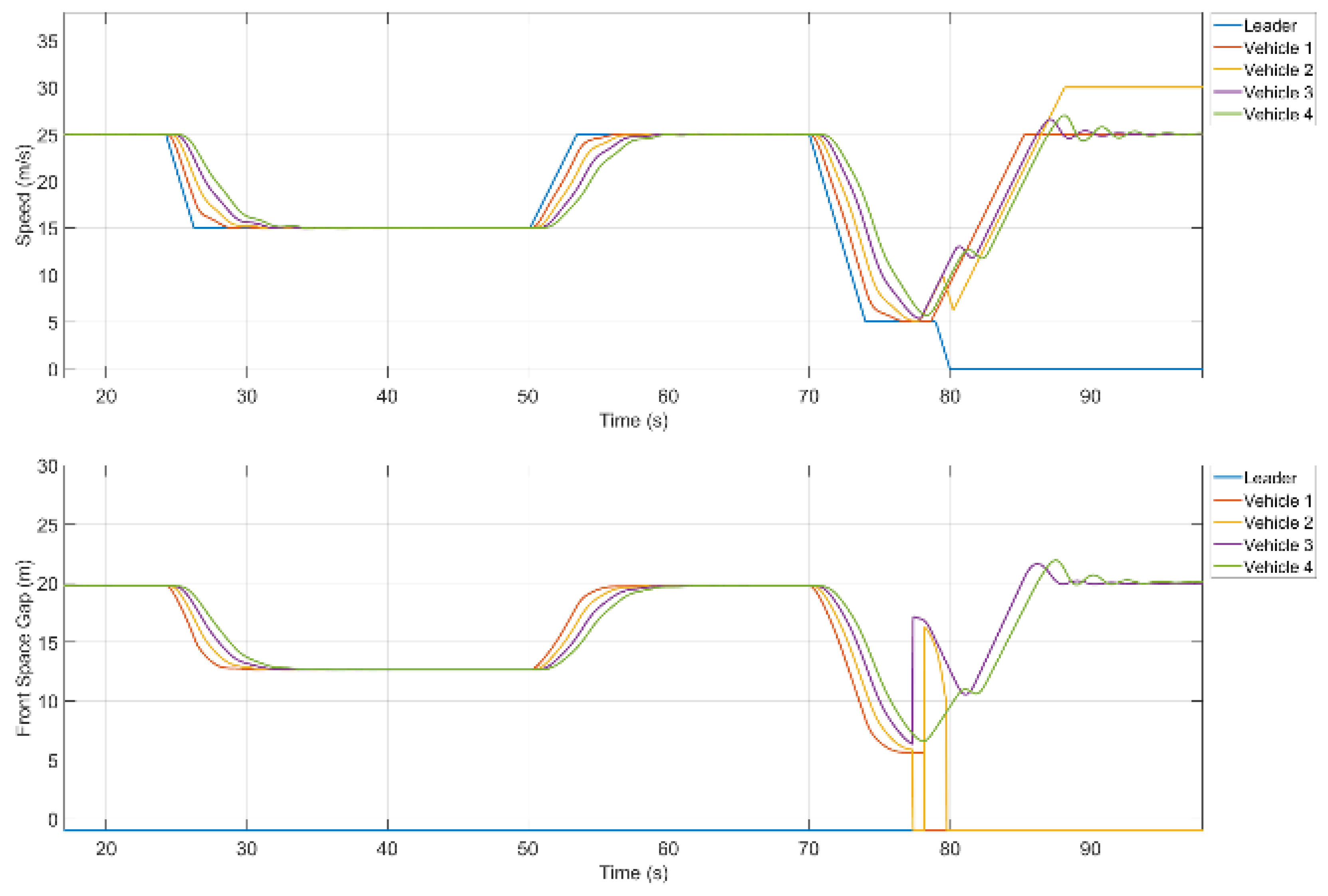
6. Verification with VENTOS
7. Conclusions and Outlook
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| CCPS | Collaborative Cyber-Physical Systems |
| ACC | Adaptive Cruise Control |
| C-ACC | Cooperative Adaptive Cruise Control |
| CPS | Cyber-Physical System |
| R-ST | Resilient State Transition |
| STD | State Transition Diagram |
| R-STD | Resilient State Transition Diagram |
| VENTOS | Vehicular NeTwork Open Simulator) |
| V2V | Vehicle to Vehicle |
| V2L | Vehicle to Leader |
| VANET | Vehicular Adhoc Network |
| LIDAR | Light Detection and Ranging |
| IMU | Inertial Measurement Unit |
| WEnco | Wheel-Encoder |
| IDM | Intelligent Driving Model |
| US | Ultrasonic Sensor |
| SUMO | Simulation of Urban Mobility |
References
- Ali, N.; Hong, J.-E. Failure Detection and Prevention for Cyber-Physical Systems Using Ontology-Based Knowledge Base. Computers 2018, 7, 68. [Google Scholar] [CrossRef] [Green Version]
- Guariniello, C.; Raz, A.K.; Fang, Z.; DeLaurentis, D. System-of-systems Tools and Techniques for the Analysis of Cyber-physical Systems. Syst. Eng. 2020, 23, 480–491. [Google Scholar] [CrossRef]
- Törsleff, S.; Hildebrandt, C.; Daun, M.; Brings, J.; Fay, A. Developing Ontologies for the Collaboration of Cyber-Physical Systems: Requirements and Solution Approach. In Proceedings of the 2018 4th International Workshop on Emerging Ideas and Trends in the Engineering of Cyber-Physical Systems (EITEC), Porto, Portugal, 11 April 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 25–32. [Google Scholar]
- Arai, T.; Ota, J. Let Us Work Together-Task Planning of Multiple Mobile Robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. IROS’96 1996, Osaka, Japan, 8 November 1996; IEEE: Piscataway, NJ, USA, 1996; Volume 1, pp. 298–303. [Google Scholar]
- Vieira, B.; Severino, R.; Koubâa, A.; Tovar, E. Towards a Realistic Simulation Framework for Vehicular Platooning Applications. In Proceedings of the 2019 IEEE 22nd International Symposium on Real-Time Distributed Computing (ISORC), Valencia, Spain, 7–9 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 93–94. [Google Scholar]
- Ploeg, J.; Scheepers, B.T.M.; Van Nunen, E.; Van de Wouw, N.; Nijmeijer, H. Design and Experimental Evaluation of Cooperative Adaptive Cruise Control. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 260–265. [Google Scholar]
- Kaiser, B.; Nejad, B.M.; Kusche, D.; Schulte, H. Systematic Design and Validation of Degradation Cascades for Safety-Relevant Systems. In Proceedings of the Annual European Safety and Reliability Conference ESREL, Portorož, Slovenia, 18–22 June 2017. [Google Scholar]
- Amoozadeh, M.; Ching, B.; Chuah, C.-N.; Ghosal, D.; Zhang, H.M. VENTOS: Vehicular Network Open Simulator with Hardware-in-the-Loop Support. Procedia Comput. Sci. 2019, 151, 61–68. [Google Scholar] [CrossRef]
- Lin, K.-J.; Panahi, M. A Real-Time Service-Oriented Framework to Support Sustainable Cyber-Physical Systems. In Proceedings of the 2010 8th IEEE International Conference on Industrial Informatics, Osaka, Japan, 13–16 July 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 15–21. [Google Scholar]
- Zhang, M.; Selic, B.; Ali, S.; Yue, T.; Okariz, O.; Norgren, R. Understanding Uncertainty in Cyber-Physical Systems: A Conceptual Model. In Proceedings of the European Conference on Modelling Foundations and Applications, Vienna, Austria, 6–7 July 2016; Springer: Berlin/Heidelberg, Germany, 2016; pp. 247–264. [Google Scholar]
- Ma, T.; Ali, S.; Yue, T. Conceptually Understanding Uncertainty in Self-Healing Cyber-Physical Systems. Simula Res. Lab Tech. Rep. 2016, 7, 2016. [Google Scholar]
- Hyun, S.; Song, J.; Shin, S.; Bae, D.-H. Statistical Verification Framework for Platooning System of Systems with Uncertainty. In Proceedings of the 2019 26th Asia-Pacific Software Engineering Conference (APSEC), Putrajaya, Malaysia, 2–5 December 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 212–219. [Google Scholar]
- Zarrouki, M.; Klös, V.; Grabowski, M.; Glesner, S. Fault-Tolerance by Graceful Degradation for Car Platoons. In Proceedings of the Workshop on Autonomous Systems Design (ASD 2019), Leuven, Belgium, 4–5 April 2019; Schloss Dagstuhl-Leibniz-Zentrum fuer Informatik: Wadern, Germany, 2019. [Google Scholar]
- Schilling, T.; Wyss, R.; Binder, C.R. The Resilience of Sustainability Transitions. Sustainability 2018, 10, 4593. [Google Scholar] [CrossRef] [Green Version]
- Binder, C.R.; Mühlemeier, S.; Wyss, R. An Indicator-Based Approach for Analyzing the Resilience of Transitions for Energy Regions. Part I: Theoretical and Conceptual Considerations. Energies 2017, 10, 36. [Google Scholar] [CrossRef] [Green Version]
- Baron, C.; Louis, V. Towards a Continuous Certification of Safety-Critical Avionics Software. Comput. Ind. 2021, 125, 103382. [Google Scholar] [CrossRef]
- Raspotnig, C.; Opdahl, A. Supporting Failure Mode and Effect Analysis: A Case Study with Failure Sequence Diagrams. In Proceedings of the International Working Conference on Requirements Engineering: Foundation for Software Quality, Essen, Germany, 19–22 March 2012; Springer: Berlin/Heidelberg, Germany, 2012; pp. 117–131. [Google Scholar]
- Börger, E.; Cavarra, A.; Riccobene, E. Modeling the Dynamics of UML State Machines. In Proceedings of the International Workshop on Abstract State Machines, Verità, Switzerland, 19–24 March 2000; Springer: Berlin/Heidelberg, Germany, 2000; pp. 223–241. [Google Scholar]
- Firesmith, D. System Resilience: What Exactly Is It? Available online: https://insights.sei.cmu.edu/sei_blog/2019/11/system-resilience-what-exactly-is-it.html (accessed on 10 August 2021).
- Laprie, J.-C. From Dependability to Resilience. In Proceedings of the 38th IEEE/IFIP International Conference on Dependable Systems and Networks, Anchorage, AK, USA, 24–27 June 2008; pp. G8–G9. [Google Scholar]
- Ramirez, A.J.; Jensen, A.C.; Cheng, B.H.C. A Taxonomy of Uncertainty for Dynamically Adaptive Systems. In Proceedings of the 2012 7th International Symposium on Software Engineering for Adaptive and Self-Managing Systems (SEAMS), Zürich, Switzerland, 4–5 June 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 99–108. [Google Scholar]
- Jia, D.; Lu, K.; Wang, J.; Zhang, X.; Shen, X. A Survey on Platoon-Based Vehicular Cyber-Physical Systems. IEEE Commun. Surv. Tutor. 2015, 18, 263–284. [Google Scholar] [CrossRef] [Green Version]
- Kesting, A.; Treiber, M.; Helbing, D. Enhanced Intelligent Driver Model to Access the Impact of Driving Strategies on Traffic Capacity. Philos. Trans. R. Soc. Math. Phys. Eng. Sci. 2010, 368, 4585–4605. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lu, D.; Li, Z.; Huang, D. Platooning as a Service of Autonomous Vehicles. In Proceedings of the 2017 IEEE 18th International Symposium on A World of Wireless, Mobile and Multimedia Networks (WoWMoM), Macao, China, 12–15 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Knowles Flanagan, S.; Tang, Z.; He, J.; Yusoff, I. Investigating and Modeling of Cooperative Vehicle-to-Vehicle Safety Stopping Distance. Future Internet 2021, 13, 68. [Google Scholar] [CrossRef]
- Lee, W.; Eckenhoff, K.; Yang, Y.; Geneva, P.; Huang, G. Visual-Inertial-Wheel Odometry with Online Calibration. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 4559–4566. [Google Scholar]
- Zhao, B.; Huang, Y.; Wei, H.; Hu, X. Ego-Motion Estimation Using Recurrent Convolutional Neural Networks through Optical Flow Learning. Electronics 2021, 10, 222. [Google Scholar] [CrossRef]
- Varga, A. Using the OMNeT++ Discrete Event Simulation System in Education. IEEE Trans. Educ. 1999, 42, 11. [Google Scholar] [CrossRef]
- Behrisch, M.; Bieker, L.; Erdmann, J.; Krajzewicz, D. SUMO–Simulation of Urban Mobility: An Overview. In Proceedings of the SIMUL 2011, The Third International Conference on Advances in System Simulation, Barcelona, Spain, 23–29 October 2011; ThinkMind: Trichy, India, 2011. [Google Scholar]
- Ucar, S.; Turan, B.; Ergen, S.C.; Ozkasap, O.; Ergen, M. Dimming Support for Visible Light Communication in Intelligent Transportation and Traffic System. In Proceedings of the NOMS 2016–2016 IEEE/IFIP Network Operations and Management Symposium, Istanbul, Turkey, 25–29 April 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1193–1196. [Google Scholar]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali, N.; Hussain, M.; Hong, J.-E. Fault-Tolerance by Resilient State Transition for Collaborative Cyber-Physical Systems. Mathematics 2021, 9, 2851. https://doi.org/10.3390/math9222851
Ali N, Hussain M, Hong J-E. Fault-Tolerance by Resilient State Transition for Collaborative Cyber-Physical Systems. Mathematics. 2021; 9(22):2851. https://doi.org/10.3390/math9222851
Chicago/Turabian StyleAli, Nazakat, Manzoor Hussain, and Jang-Eui Hong. 2021. "Fault-Tolerance by Resilient State Transition for Collaborative Cyber-Physical Systems" Mathematics 9, no. 22: 2851. https://doi.org/10.3390/math9222851
APA StyleAli, N., Hussain, M., & Hong, J.-E. (2021). Fault-Tolerance by Resilient State Transition for Collaborative Cyber-Physical Systems. Mathematics, 9(22), 2851. https://doi.org/10.3390/math9222851