
Quasi-Interpolation in a Space of C2 Sextic Splines over Powell–Sabin Triangulations

 , , , and
, , , and 
Abstract
:1. Introduction
2. Bernstein–Bézier, Polar Forms and Control Polynomials
- for any permutation of integers .
- if .
- .
3. Explicit Construction of a B-Spline Basis for a Space of Powell–Sabin Super Splines
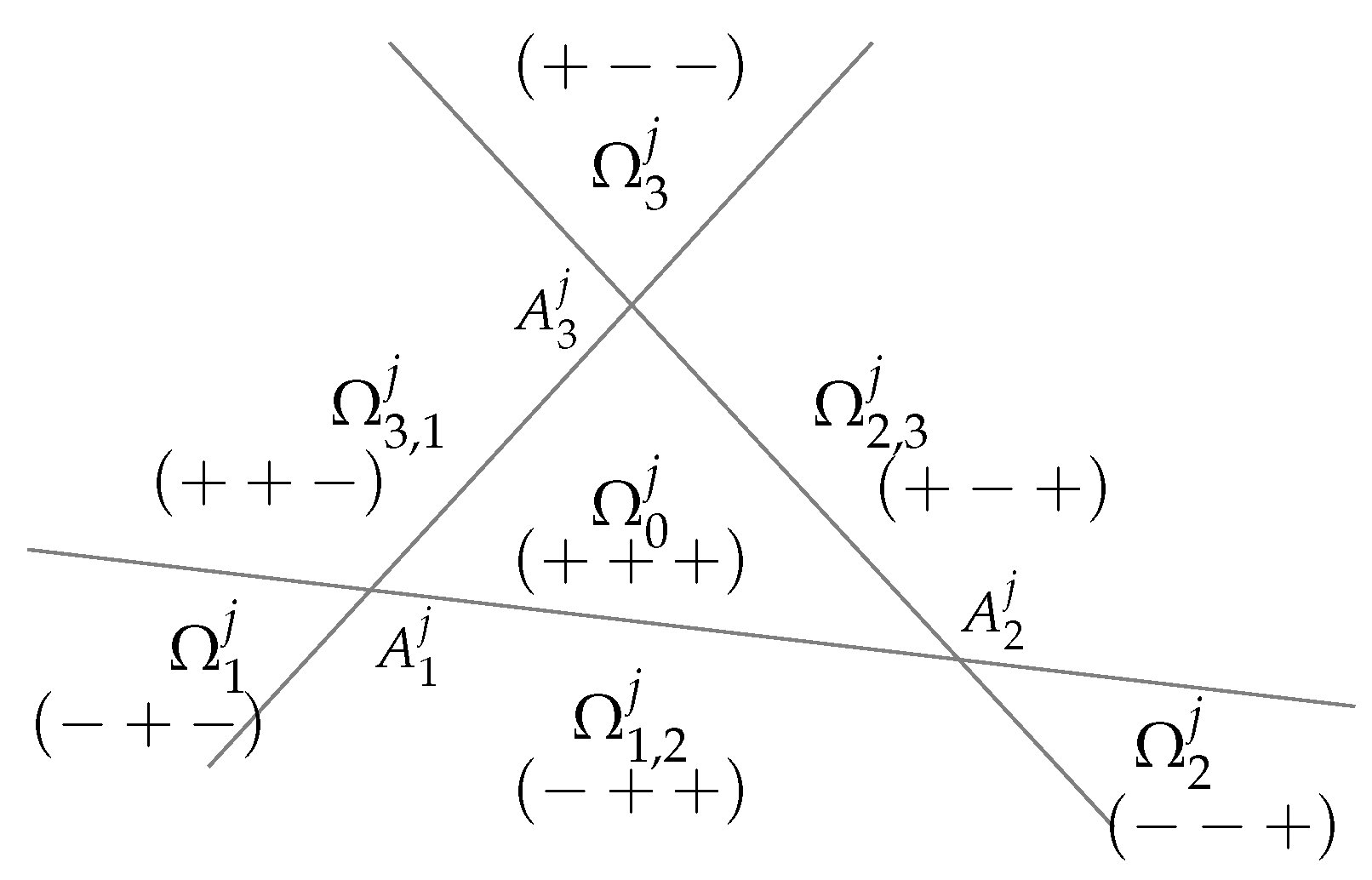
- Choose an interior point in each triangle . If two triangles and have a common edge, then the line joining and should intersect the common edge at some point .
- Join each point to the vertices of .
- For each edge of the triangle :
- (a)
- which is common to a triangle , join to ;
- (b)
- which belongs to the boundary , join to an arbitrary point on that edge.
3.1. Vertex B-Spline
3.2. Triangle B-Spline
4. Nearly Optimal PS6 Triangles
4.1. Quadratic Programming Problem
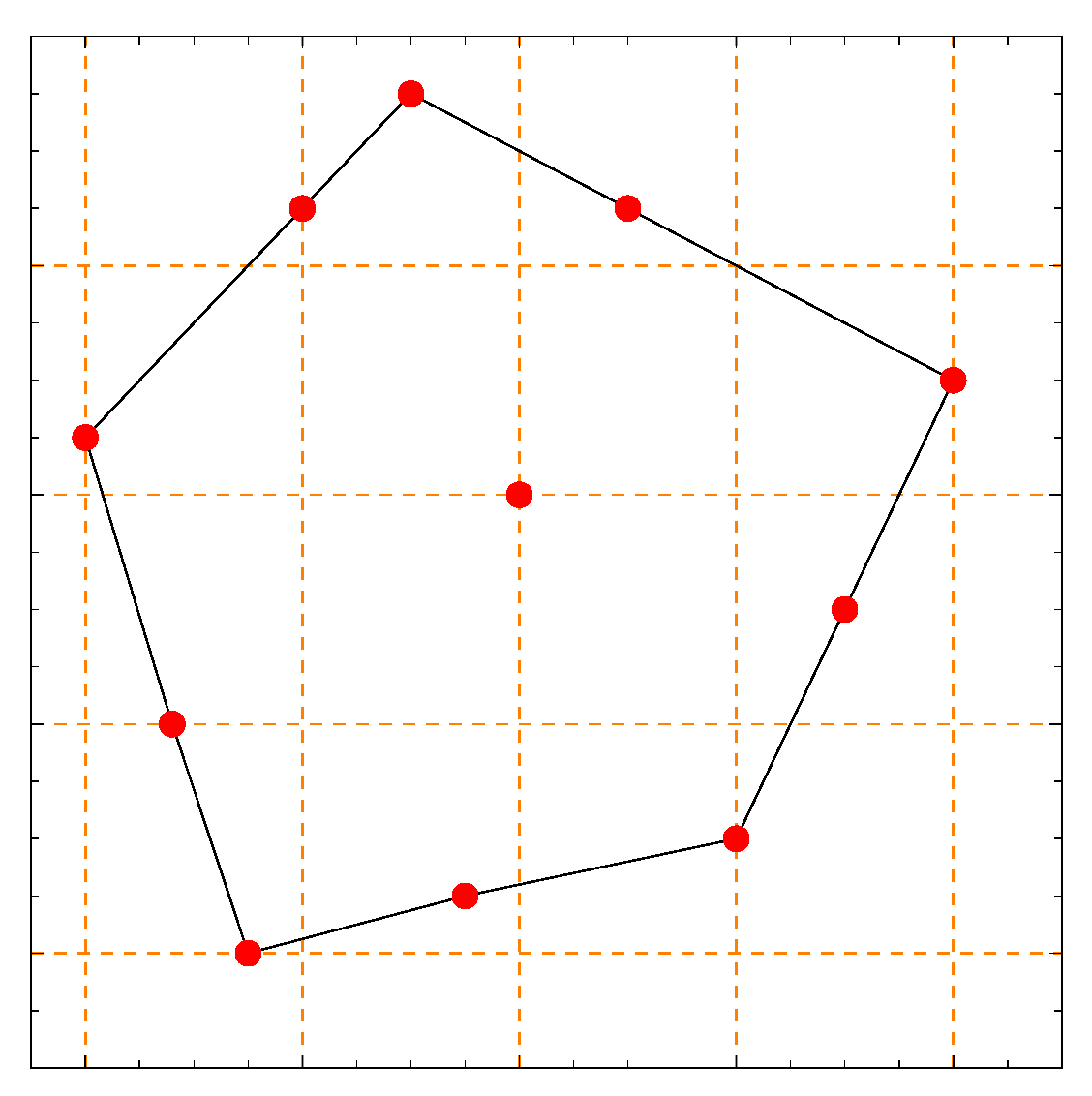
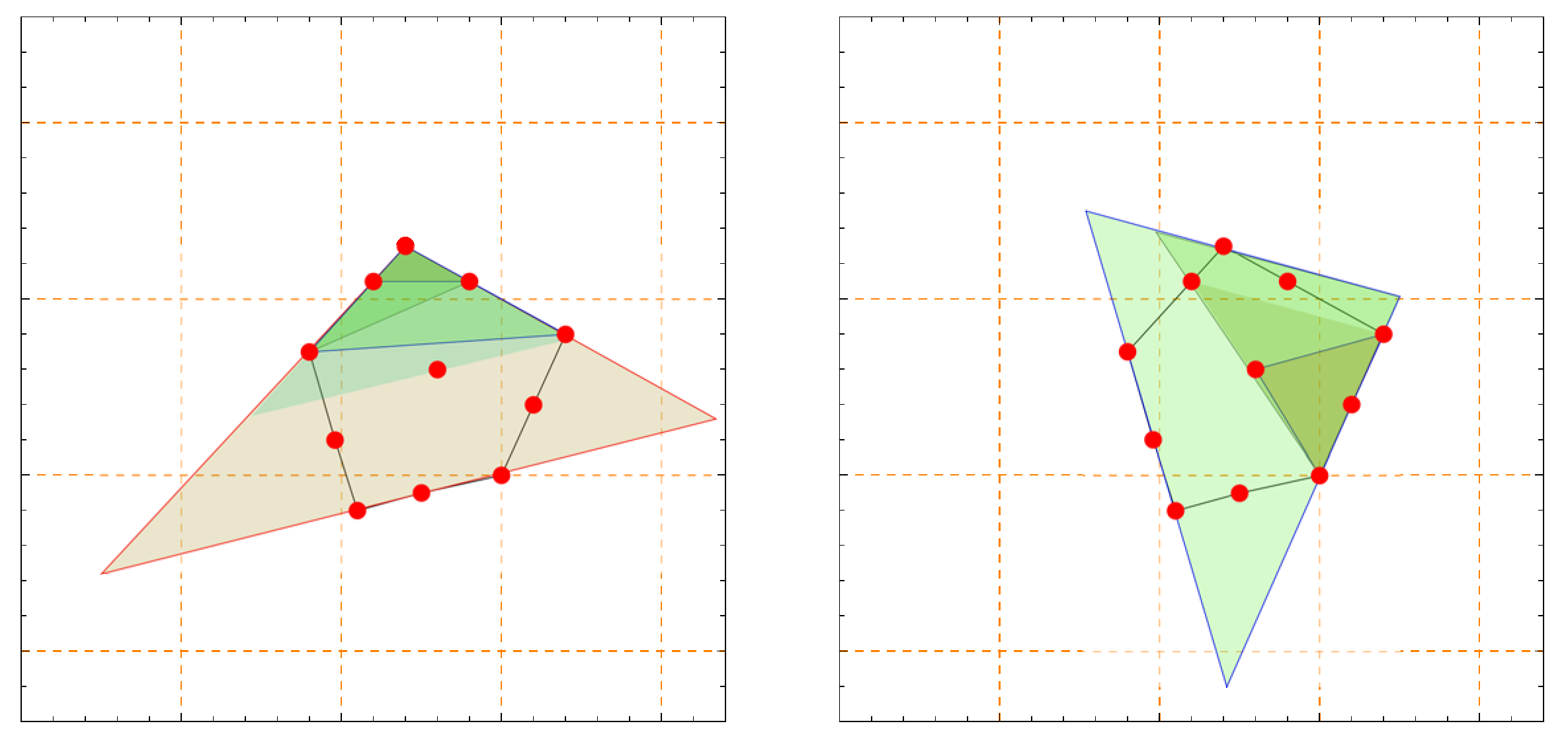
4.2. Algorithm for Determining a Triangle Containing a Set of Points
| Algorithm 1Determining the triangle from |
| Require: compute the barycentric coordinates of with respect to and select the region where is located. if then is in , perform and move to the next point else if then
else if then . The same procedure is applied if or end if |
- If , then, the resulting triangle will be itself.
- If , then the obtained triangle will contain .
5. Quasi-Interpolation Schemes with Optimal Approximation Order
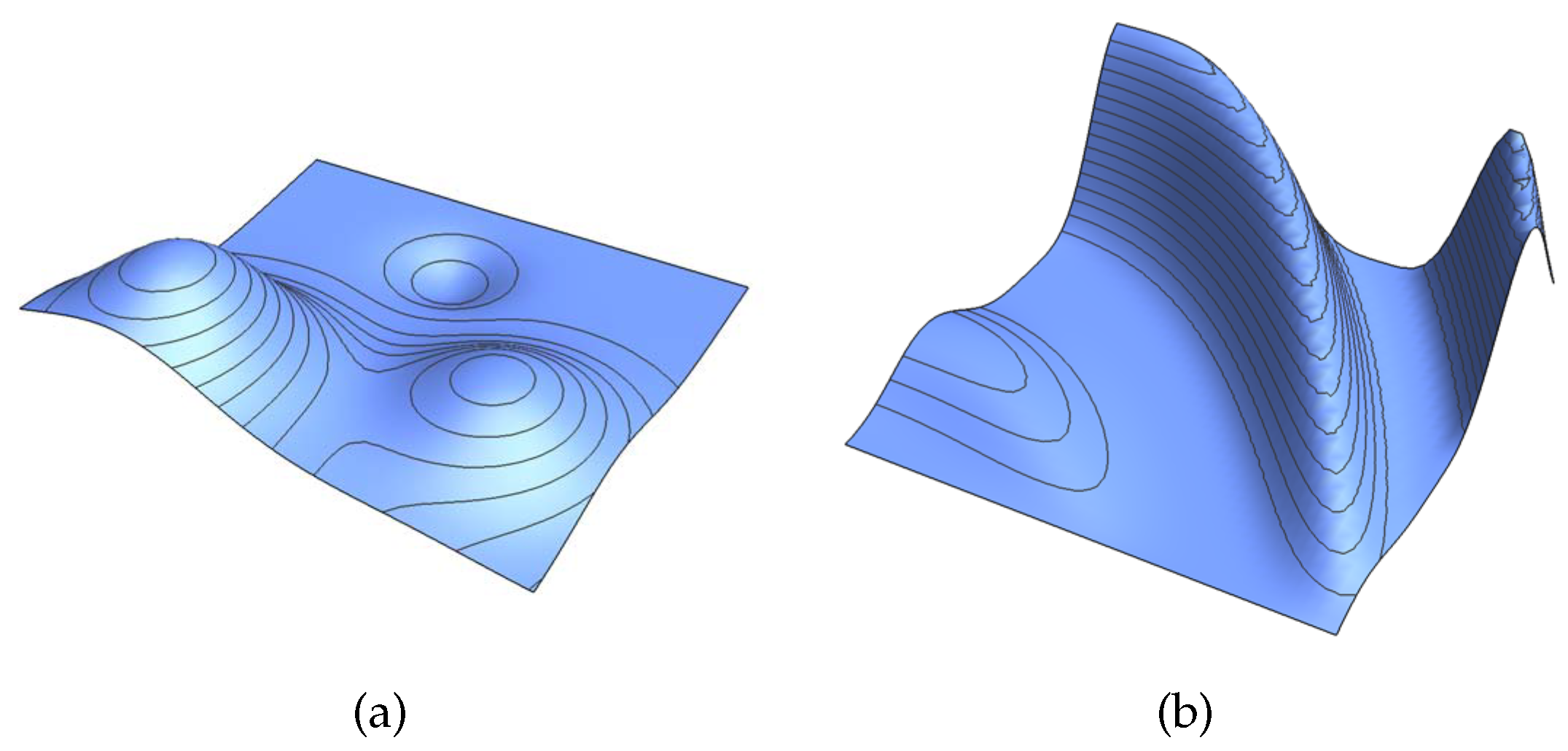
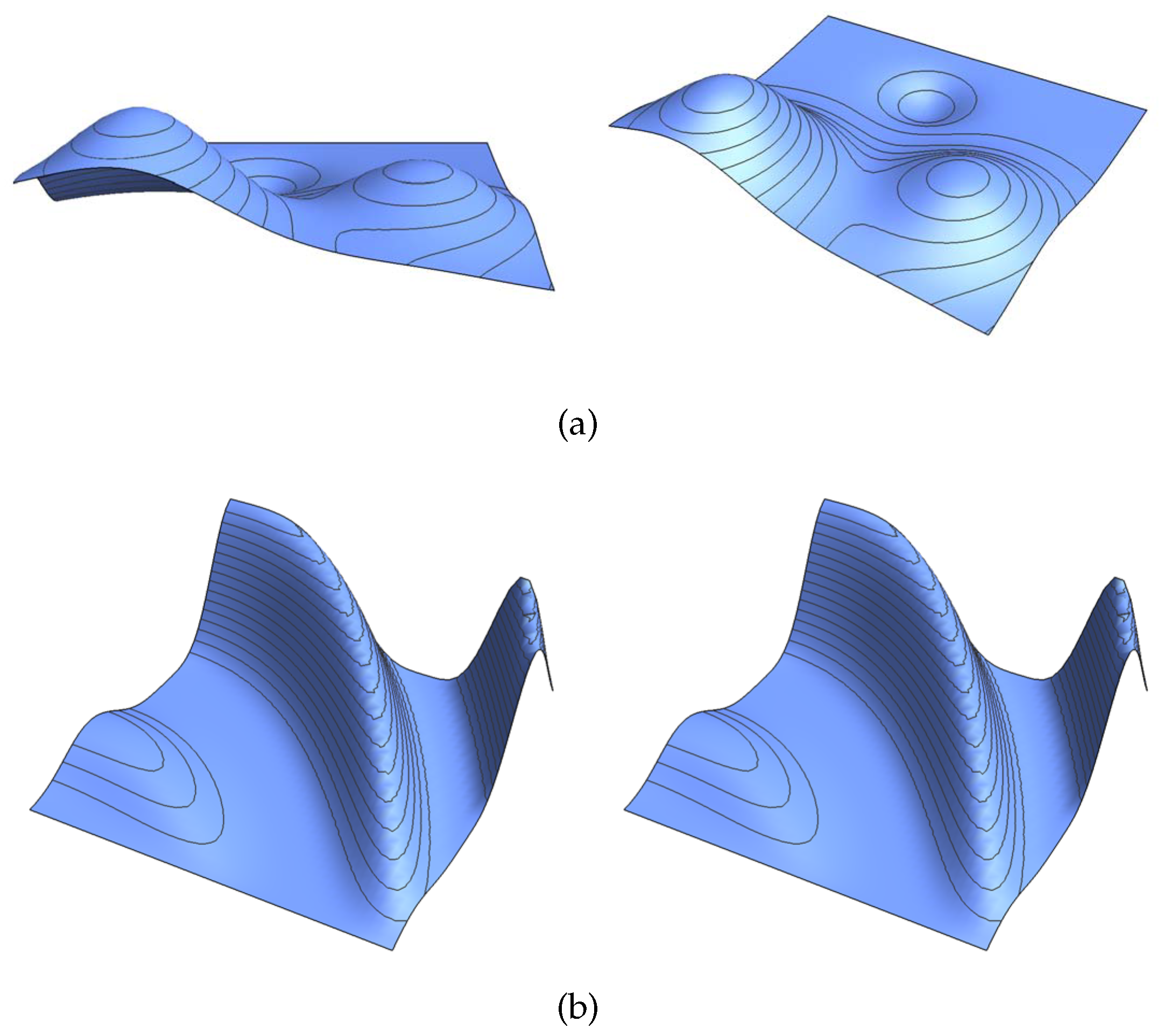
Numerical Tests
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ženíšek, A. A general theorem on triangular finite C(m)-elements. Revue Française D’automatique Informatique Recherche Opérationnelle Analyse Numérique 1974, 8, 119–127. [Google Scholar] [CrossRef]
- Clough, R.W.; Tocher, J.L. Finite element stiffness matrices for analysis of plates in bending. In Proceedings of the Conference on Matrix Methods in Structural Mechanics, Wright-Patterson A. F. B., Dayton, OH, USA, 26–28 October 1965. [Google Scholar]
- Powell, M.; Sabin, M. Piecewise quadratic approximations on triangles. ACM Trans. Math. Softw. 1977, 3, 316–325. [Google Scholar] [CrossRef]
- Lamnii, A.; Lamnii, M.; Mraoui, H. A normalized basis for condensed C1 Powell-Sabin-12 splines. Comput. Aided Geom. Design. 2015, 34, 5–20. [Google Scholar] [CrossRef]
- Lai, M.J.; Schumaker, L.L. Spline Functions on Triangulations; Cambridge University Press: Cambridge, UK, 2007. [Google Scholar]
- Fortes, M.A.; González, P.; Ibxaxñez, M.J.; Pasadas, M. Interpolating minimal energy C1-Surfaces on Powell-Sabin Triangulations: Application to the resolution of elliptic problems. Numer. Methods Partial. Differ. Equ. 2014, 31, 798–821. [Google Scholar] [CrossRef]
- May, S.; Vignollet, J.; De Borst, R. Powell-Sabin B-splines and unstructured standard T-splines for the solution of the Kirchhoff-Love plate theory exploiting Bézier extraction. Int. J. Numer. Meth. Engng. 2016, 107, 205–233. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.; Borst, D.R. Cohesive fracture analysis using Powell-Sabin B-splines. Int. J. Numer. Anal. Methods Geomech. 2019, 43, 625–640. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Giorgiani, G.; Guillard, H.; Nkonga, B. A Powell-Sabin finite element scheme for partial differential equations. ESAIM Proc. Surv. 2016, 53, 64–76. [Google Scholar] [CrossRef] [Green Version]
- Mulansky, B.; Schmidt, J.W. Powell-Sabin splines in range restricted interpolation of scattered data. Computing 1994, 53, 137–154. [Google Scholar] [CrossRef]
- Lamnii, M.; Mraoui, H.; Tijini, A. Raising the approximation order of multivariate quasi-interpolants. BIT Numer. Math. 2014, 54, 749–761. [Google Scholar] [CrossRef]
- Sbibih, D.; Serghini, A.; Tijini, A. Polar forms and quadratic spline quasi-interpolants on Powell Sabin partitions. Appl. Numer. Math. 2009, 59, 938–958. [Google Scholar] [CrossRef]
- Sbibih, D.; Serghini, A.; Tijini, A. Superconvergent quadratic spline quasi-interpolants on Powell-Sabin partitions. Appl. Numer. Math. 2015, 87, 74–86. [Google Scholar] [CrossRef]
- Sbibih, D.; Serghini, A.; Tijini, A. Superconvergent local quasi-interpolants based on special multivariate quadratic spline space over a refined quadrangulation. Appl. Math. Comput. 2015, 250, 145–156. [Google Scholar] [CrossRef]
- Sbibih, D.; Serghini, A.; Tijini, A.; Zidna, A. Superconvergent C1 cubic spline quasi-interpolants on Powell-Sabin partitions. BIT Numer. Math. 2015, 55, 797–821. [Google Scholar] [CrossRef]
- Remogna, S. Bivariate C2 cubic spline quasi-interpolants on uniform Powell-Sabin triangulations of a rectangular domain. Adv. Comput. Math. 2012, 36, 39–65. [Google Scholar] [CrossRef]
- Manni, C.; Sablonnière, P. Quadratic spline quasi-interpolants on Powell-Sabin partitions. Adv. Comput. Math. 2007, 26, 283–304. [Google Scholar] [CrossRef] [Green Version]
- Bartoň, M.; Kosinka, J. On numerical quadrature for C1 quadratic Powell-Sabin 6-split macro-triangles. J. Comput. Appl. Math. 2019, 349, 239–250. [Google Scholar] [CrossRef] [Green Version]
- Dierckx, P. On calculating normalized Powell-Sabin B-splines. Comput. Aided Geom. Design 1997, 15, 61–78. [Google Scholar] [CrossRef]
- Lamnii, M.; Mraoui, H.; Tijini, A.; Zidna, A. A normalized basis for C1 cubic super spline space on Powell-Sabin triangulation. Math. Comput. Simul. 2014, 99, 108–124. [Google Scholar] [CrossRef]
- Speleers, H.; Manni, C.; Pelosi, F.; Sampoli, M.L. Isogeometric analysis with Powell–Sabin splines for advection–diffusion–reaction problems. Comput. Methods Appl. Mech. Eng. 2012, 221–222, 132–148. [Google Scholar] [CrossRef]
- Grošelj, J.; Krajnc, M. C1 cubic splines on Powell-Sabin triangulations. Appl. Math. Comput. 2016, 272, 114–126. [Google Scholar] [CrossRef]
- Lai, M.J. On C2 quintic spline functions over triangulations of Powell-Sabin’s type. J. Comput. Appl. Math. 1996, 73, 135–155. [Google Scholar] [CrossRef] [Green Version]
- Lamnii, M.; Mraoui, H.; Tijini, A. Construction of quintic Powell-Sabin spline quasi-interpolants based on blossoming. J. Comput. Appl. Math. 2013, 250, 190–209. [Google Scholar] [CrossRef]
- Speleers, H. Construction of normalized B-splines for a family of smooth spline spaces over Powell-Sabin triangulations. Constr. Approx. 2013, 37, 41–72. [Google Scholar] [CrossRef]
- Grošelj, J. A normalized representation of super splines of arbitrary degree on Powell-Sabin triangles. BIT Numer. Math. 2016, 56, 1257–1280. [Google Scholar] [CrossRef]
- Speleers, H. A family of smooth quasi-interpolants defined over Powell-Sabin triangulations. Constr. Approx. 2015, 41, 297–324. [Google Scholar] [CrossRef]
- Ramshaw, L. Blossoming: A Connect-the-Dots Approach to Splines; Tech. Rep. 19; Digital Systems Research Center: Palo Alto, CA, USA, 1987. [Google Scholar]
- Seidel, H. An introduction to polar forms. IEEE Comput. Graph. Appl. 1993, 13, 38–46. [Google Scholar] [CrossRef]
- Dobronets, B.; Shaydurov, V. Hermitian Finite Element Complementing the Bogner-Fox-Schmit Rectangle Near Curvilinear Boundary. Lobachevskii J. Math. 2016, 37, 527–533. [Google Scholar] [CrossRef]
- Vanraes, E.; Dierckx, P.; Bultheel, A. On the Choice of the PS-Triangles; Technical Report 353; Department of Computer Science, K.U. Leuven: Leuven, Belgium, 2003. [Google Scholar]
- Franke, R. Scattered data interpolation: Tests of some methods. Math. Comp. 1982, 38, 181–200. [Google Scholar]
- Nielson, G.M. A first order blending method for triangles based upon cubic interpolation. Int. J. Numer. Meth. Eng. 1978, 15, 308–318. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Franke’s Function | Nielson’s Function | ||||
|---|---|---|---|---|---|
| Estimated Error | NCO | Estimated Error | NCO | ||
| 2 | 9 | – | – | ||
| 4 | 25 | ||||
| 8 | 81 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Eddargani, S.; Ibáñez, M.J.; Lamnii, A.; Lamnii, M.; Barrera, D. Quasi-Interpolation in a Space of C2 Sextic Splines over Powell–Sabin Triangulations. Mathematics 2021, 9, 2276. https://doi.org/10.3390/math9182276
Eddargani S, Ibáñez MJ, Lamnii A, Lamnii M, Barrera D. Quasi-Interpolation in a Space of C2 Sextic Splines over Powell–Sabin Triangulations. Mathematics. 2021; 9(18):2276. https://doi.org/10.3390/math9182276
Chicago/Turabian StyleEddargani, Salah, María José Ibáñez, Abdellah Lamnii, Mohamed Lamnii, and Domingo Barrera. 2021. "Quasi-Interpolation in a Space of C2 Sextic Splines over Powell–Sabin Triangulations" Mathematics 9, no. 18: 2276. https://doi.org/10.3390/math9182276
APA StyleEddargani, S., Ibáñez, M. J., Lamnii, A., Lamnii, M., & Barrera, D. (2021). Quasi-Interpolation in a Space of C2 Sextic Splines over Powell–Sabin Triangulations. Mathematics, 9(18), 2276. https://doi.org/10.3390/math9182276