
Coupled Discrete Fractional-Order Logistic Maps




Abstract
1. Introduction
2. A Model of Coupled FO Logistic Maps
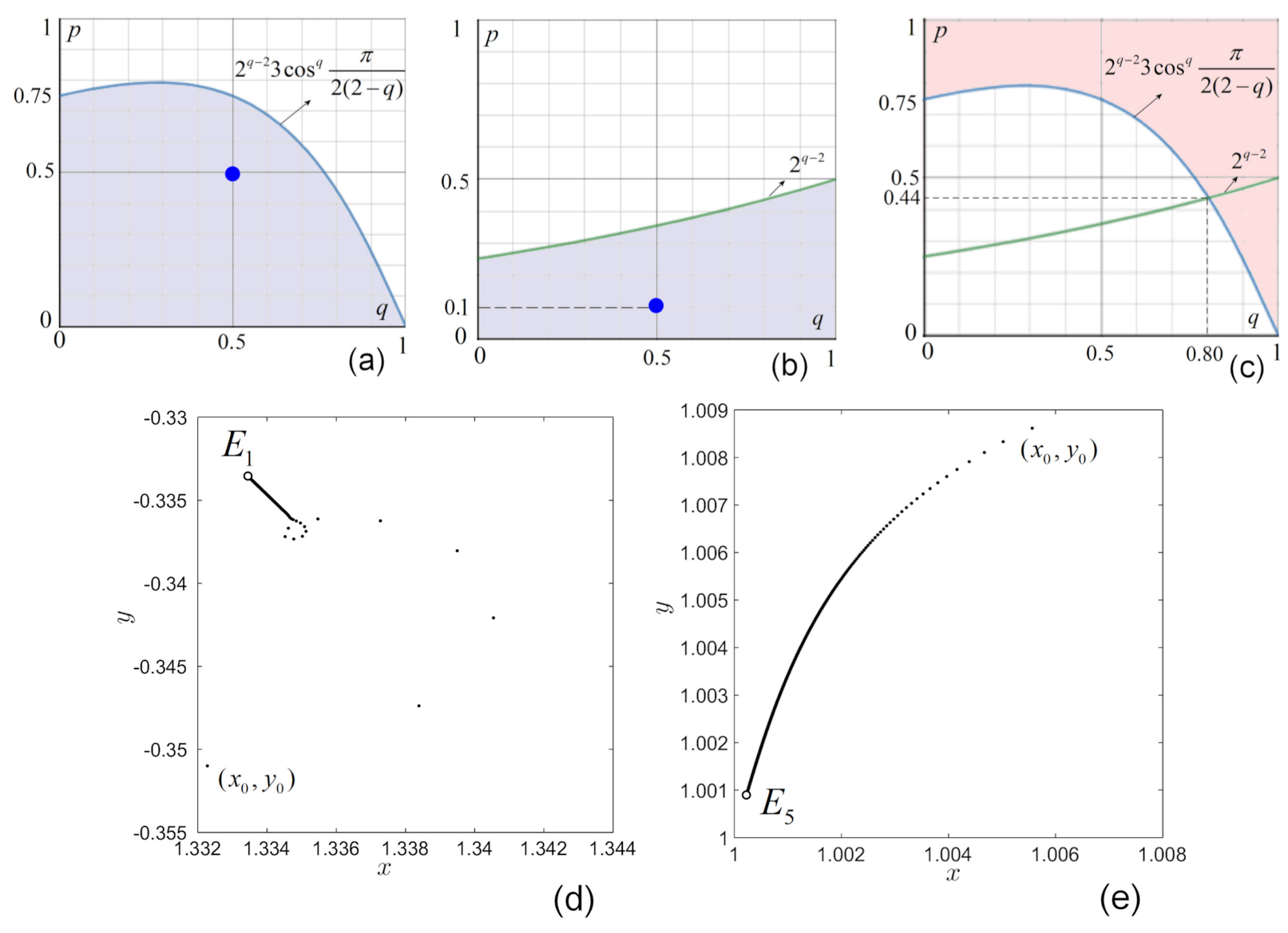
3. Bounds and Global Dynamics
- (1)
- (2)
- (3)
- (4)
4. Non-Existence of Hidden Attractors
- (i)
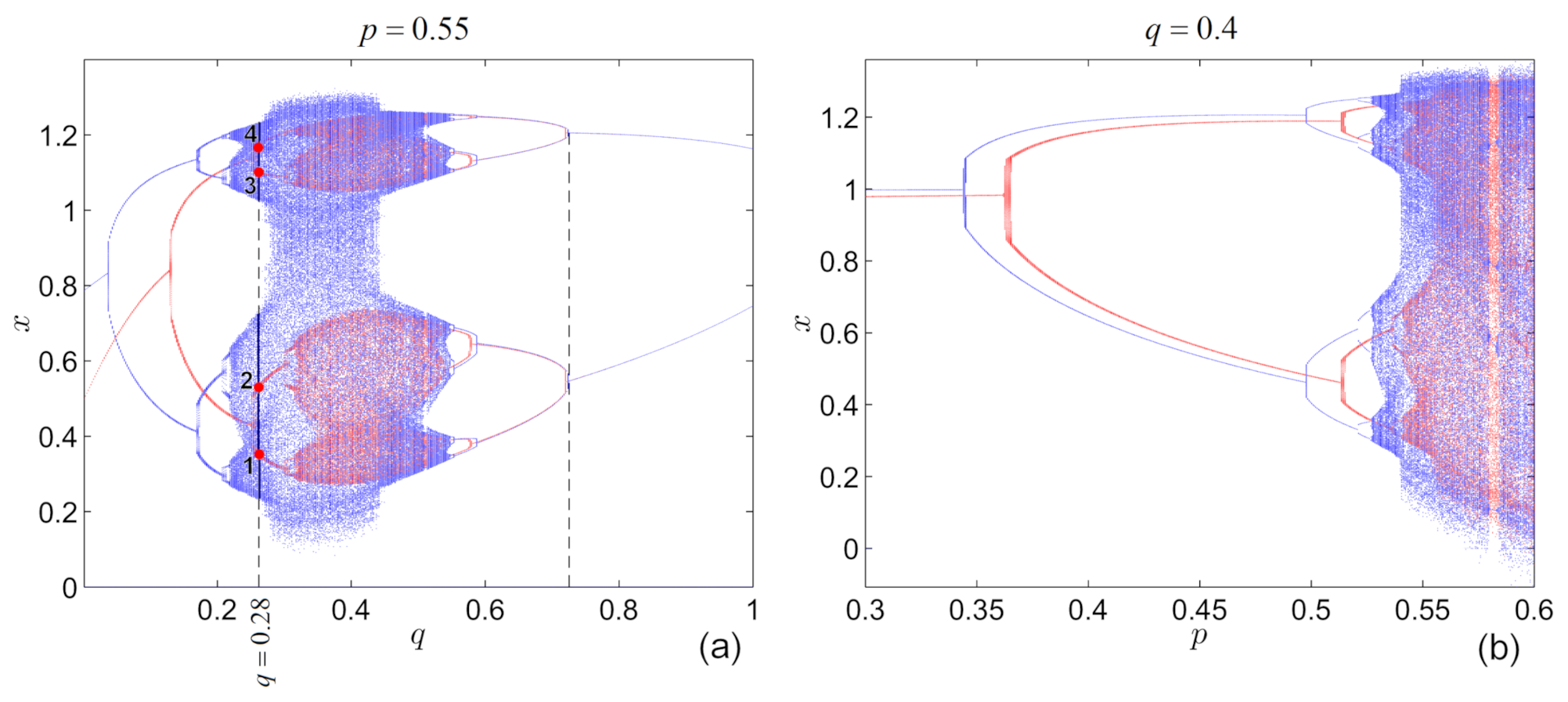
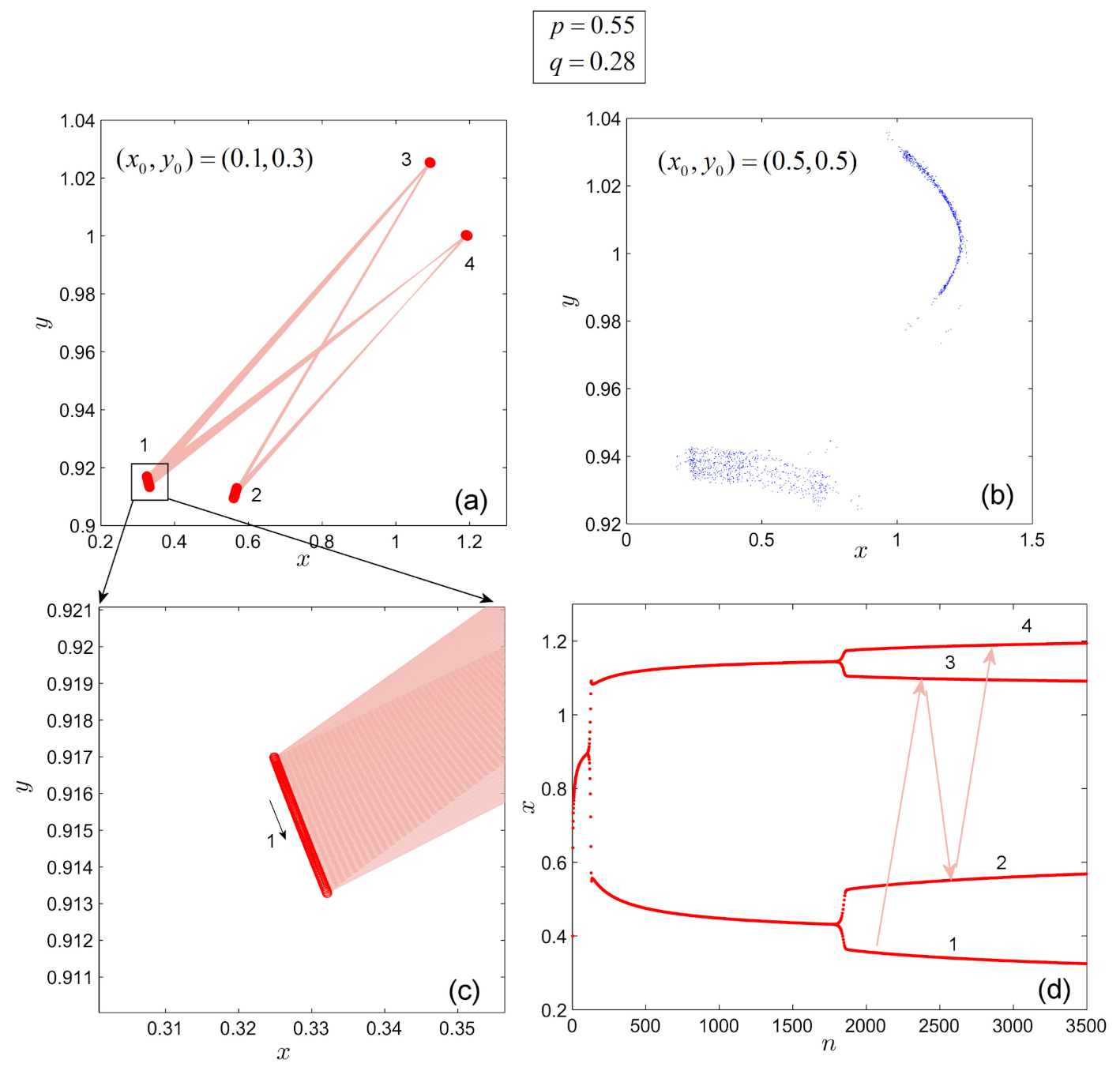
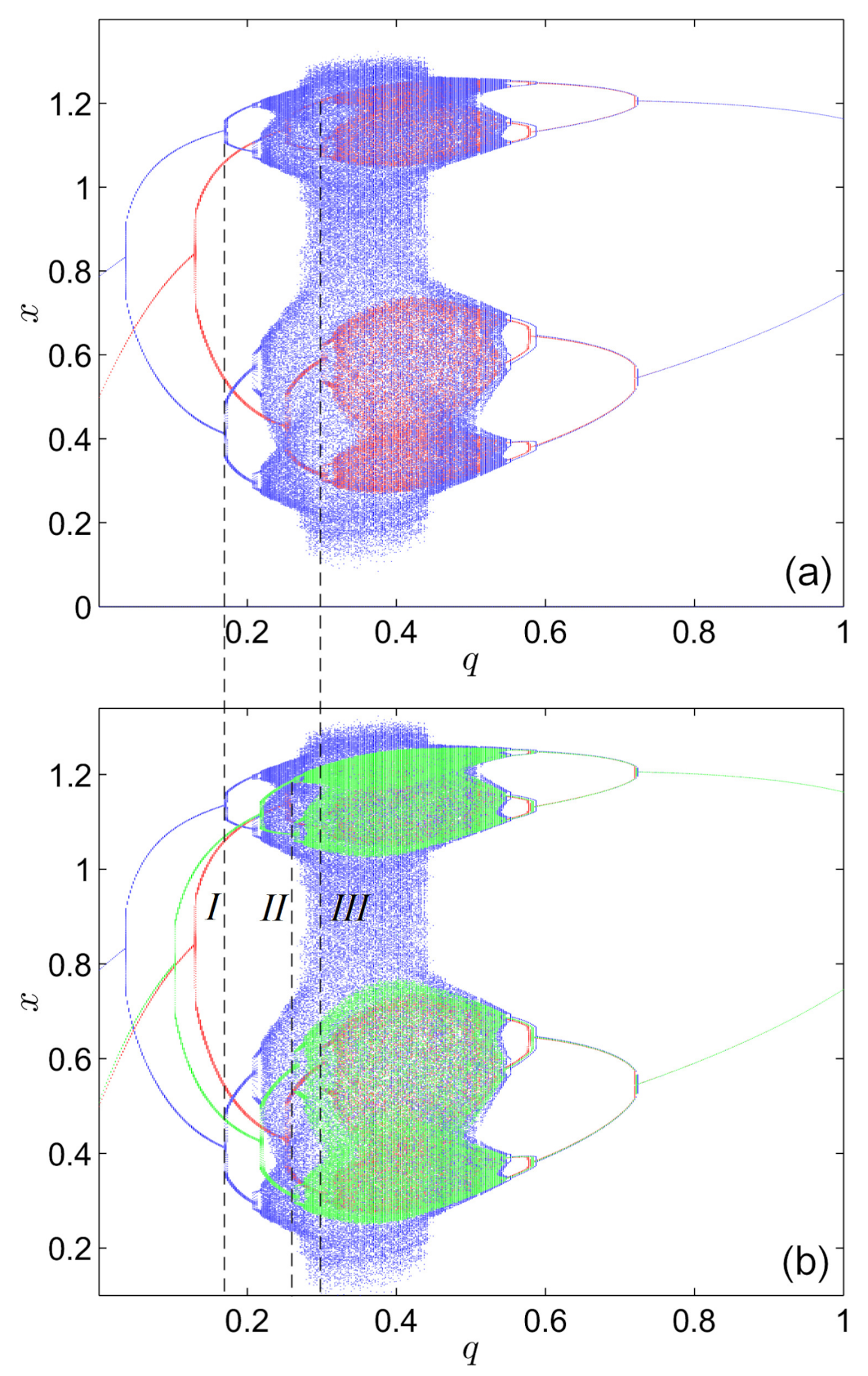
- The shapes of BSs approximately preserve the shapes for different initial conditions, but move along the p-axis.
- (ii)
- This delay-like phenomenon with respect to the initial conditions (the BSs seem to move “forward” or “backward” on the BDs (see the dotted lines I, , and in Figure 5, as the initial conditions are changing) was already found in a continuous-time FO system [47], where the “delay” was observed with respect to the integration step-size of the numerical method used.
- (iii)
- It is interesting to compare the above results with the case of the Feigenbaum attractor of the IO logistic map , for the limiting value [48], which, however, is not an attracting set and for which there is no sensitive dependence on initial conditions.
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Oldham, K.; Spanier, J. The Fractional Calculus: Theory and Applications of Differentiation and Integration to Arbitrary Order; Academic Press: New York, NY, USA, 1974. [Google Scholar]
- Podlubny, I. Geometric and physical interpretation of fractional integration and fractional differentiation. Fract. Calc. Appl. Anal. 2002, 5, 367–386. [Google Scholar]
- Li, H.-L.; Jiang, H.; Cao, J. Global synchronization of fractional-order quaternion-valued neural networks with leakage and discrete delays. Neurocomputing 2020, 385, 211–219. [Google Scholar] [CrossRef]
- Ray, S.A.; Atangana, A.; Noutchie, S.C.O.; Kurulay, M.; Bildik, N.; Kilicman, A. Fractional calculus and its applications in applied mathematics and other sciences. Math. Probl. Eng. 2014, 2014, 849395. [Google Scholar] [CrossRef]
- Kang, Y.M.; Xie, Y.; Lu, J.; Jiang, J. On the nonexistence of non-constant exact periodic solutions in a class of the Caputo fractional-order dynamical systems. Nonlinear Dyn. 2015, 82, 1259–1267. [Google Scholar] [CrossRef]
- Tavazoei, M.; Haeri, M. A proof for non existence of periodic solutions in time invariant fractional order systems. Automatica 2009, 45, 1886–1890. [Google Scholar] [CrossRef]
- Tavazoei, M. A note on fractional-order derivatives of periodic functions. Automatica 2010, 46, 945–948. [Google Scholar] [CrossRef]
- Yazdani, M.; Salarieh, H. On the existence of periodic solutions in time-invariant fractional order systems. Automatica 2011, 47, 1834–1837. [Google Scholar] [CrossRef]
- Shen, J.; Lam, J. Non-existence of finite-time stable equilibria in fractional-order nonlinear systems. Automatica 2014, 50, 547–551. [Google Scholar] [CrossRef]
- Fečkan, M. Note on periodic and asymptotically periodic solutions of fractional differential equations. Stud. Syst. Decis. Control 2020, 177, 153–185. [Google Scholar]
- Kaslik, E.; Sivasundaram, S. Non-existence of periodic solutions in fractional-order dynamical systems and a remarkable difference between integer and fractional-order derivatives of periodic functions. Nonlinear Anal. Real World Appl. 2012, 13, 1489–1497. [Google Scholar] [CrossRef]
- Area, I.; Losada, J.; Nieto, J. On Fractional Derivatives and Primitives of Periodic Functions. Abstr. Appl. Anal. 2014, 2014, 392598. [Google Scholar] [CrossRef]
- Diblík, J.; Fečkan, M.; Pospisil, M. Nonexistence of periodic solutions and S-asymptotically periodic solutions in fractional difference equations. Appl. Math. Comput. 2015, 257, 230–240. [Google Scholar] [CrossRef]
- Bin, H.; Huang, L.; Zhang, G. Convergence and periodicity of solutions for a class of difference systems. Adv. Differ. Equ. 2006, 2006, 70461. [Google Scholar] [CrossRef][Green Version]
- Jonnalagadda, J. Periodic solutions of fractional nabla difference equations. Commun. Appl. Anal. 2016, 20, 585–610. [Google Scholar]
- Edelman, M. Cycles in asymptotically stable and chaotic fractional maps. Nonlinear Dyn. 2021, 104, 2829–2841. [Google Scholar] [CrossRef]
- Pospíšil, M. Note on fractional difference equations with periodic and S-asymptotically periodic right-hand side. Nonlinear Oscil. 2021, 24, 99–109. [Google Scholar]
- Danca, M.F.; Fečkan, M.; Kuznetsov, N.V.; Chen, G. Fractional-order PWC systems without zero Lyapunov exponents. Nonlinear Dyn. 2018, 92, 1061–1078. [Google Scholar] [CrossRef]
- Leonov, G.; Kuznetsov, N. Hidden attractors in dynamical systems. From hidden oscillations in Hilbert-Kolmogorov, Aizerman, and Kalman problems to hidden chaotic attractors in Chua circuits. Int. J. Bifurc. Chaos Appl. Sci. Eng. 2013, 23, 1330002. [Google Scholar] [CrossRef]
- Leonov, G.; Kuznetsov, N.; Mokaev, T. Homoclinic orbits, and self-excited and hidden attractors in a Lorenz-like system describing convective fluid motion. Eur. Phys. J. Spec. Top. 2015, 224, 1421–1458. [Google Scholar] [CrossRef]
- Kuznetsov, N. Theory of hidden oscillations and stability of control systems. J. Comput. Syst. Sci. Int. 2020, 59, 647–668. [Google Scholar] [CrossRef]
- Danca, M.F.; Kuznetsov, N.; Chen, G. Approximating hidden chaotic attractors via parameter switching. Chaos 2018, 28, 5007925. [Google Scholar] [CrossRef]
- Danca, M.F. Hidden chaotic attractors in fractional-order systems. Nonlinear Dyn. 2017, 89, 577–586. [Google Scholar] [CrossRef]
- Danca, M.F.; Bourke, P.; Kuznetsov, N. Graphical structure of attraction basins of hidden attractors: The Rabinovich-Fabrikant system. Int. J. Bifurc. Chaos 2019, 29, 1930001. [Google Scholar] [CrossRef]
- Danca, M.F.; Kuznetsov, N.; Chen, G. Unusual dynamics and hidden attractors of the Rabinovich–Fabrikant system. Nonlinear Dyn. 2017, 88, 791–805. [Google Scholar] [CrossRef]
- Danca, M.F. Hidden transient chaotic attractors of Rabinovich–Fabrikant system. Nonlinear Dyn. 2016, 86, 1263–1270. [Google Scholar] [CrossRef]
- Danca, M.F.; Kuznetsov, N. Hidden chaotic sets in a Hopfield neural system. Chaos Solitons Fractals 2017, 103, 144–150. [Google Scholar] [CrossRef]
- Danca, M.F. Coexisting Hidden and self-excited attractors in an economic system of integer or fractional order. Int. J. Bifurc. Chaos 2021, 31, 2150062. [Google Scholar] [CrossRef]
- Danca, M.F.; Fečkan, M.; Kuznetsov, N.; Chen, G. Complex dynamics, hidden attractors and continuous approximation of a fractional-order hyperchaotic PWC system. Nonlinear Dyn. 2018, 91, 2523–2540. [Google Scholar] [CrossRef]
- Jafari, S.; Sprott, J.; Nazarimehr, F. Recent new examples of hidden attractors. Eur. Phys. J. Spec. Top. 2015, 224, 1469–1476. [Google Scholar] [CrossRef]
- Diethelm, K.; Ford, N.; Freed, A. A predictor-corrector approach for the numerical solution of fractional differential equations. Nonlinear Dyn. 2002, 29, 3–22. [Google Scholar] [CrossRef]
- Garrappa, R. Numerical solution of fractional differential equations: A survey and a software tutorial. Mathematics 2018, 6, 16. [Google Scholar] [CrossRef]
- Kuttner, B. On differences of fractional order. Proc. Lond. Math. Soc. 1957, 3, 453–466. [Google Scholar] [CrossRef]
- Wang, Q.; Lu, D.; Fang, Y. Stability analysis of impulsive fractional differential systems with delay. Appl. Math. Lett. 2015, 40, 1–6. [Google Scholar] [CrossRef]
- Wu, G.C.; Baleanu, D. Stability analysis of impulsive fractional difference equations. Fract. Calc. Appl. Anal. 2018, 21, 354–375. [Google Scholar] [CrossRef]
- Edelman, M. On stability of fixed points and chaos in fractional systems. Chaos 2018, 28, 023112. [Google Scholar] [CrossRef] [PubMed]
- Lopez-Ruiz, R.; Fournier-Prunaret, D. Indirect Allee effect, bistability and chaotic oscillations in a predator-prey discrete model of logistic type. Chaos Solitons Fractals 2005, 24, 85–101. [Google Scholar] [CrossRef]
- Abdeljawad, T. On Riemann and Caputo fractional differences. Comput. Math. Appl. 2011, 62, 1602–1611. [Google Scholar] [CrossRef]
- Atici, F.M.; Eloe, P.W. Discrete fractional calculus with the nabla operator. Electron. J. Qual. Theory Differ. Equ. 2009, 3, 1–12. [Google Scholar] [CrossRef]
- Anastassiou, G.A. Discrete fractional calculus and inequalities. arXiv 2009, arXiv:0911.3370. [Google Scholar]
- Chen, F.; Luo, X.; Zhou, Y. Existence Results for Nonlinear Fractional Difference Equation. Adv. Differ. Equ. 2011, 2011, 713201. [Google Scholar] [CrossRef]
- Danca, M.F.; Fečkan, M.; Kuznetsov, N. Chaos control in the fractional order logistic map via impulses. Nonlinear Dyn. 2019, 98, 1219–1230. [Google Scholar] [CrossRef]
- Anh, P.; Babiarz, A.; Czornik, A.; Niezabitowski, M.; Siegmund, S. Asymptotic properties of discrete linear fractional equations. Bull. Pol. Acad. Sci. Tech. Sci. 2019, 67, 749–759. [Google Scholar]
- Čermak, J.; Gyǒri, I.; Nechvátal, L. On explicit stability conditions for a linear fractional difference system. Fract. Calc. Appl. Anal. 2015, 18, 651–672. [Google Scholar] [CrossRef]
- Danca, M.F. Puu system of fractional order and its chaos suppression. Symmetry 2020, 12, 340. [Google Scholar] [CrossRef]
- Wu, G.C.; Baleanu, D. Discrete chaos in fractional delayed logistic maps. Nonlinear Dyn. 2015, 80, 1697–1703. [Google Scholar] [CrossRef]
- Danca, M.F. Hopfield neuronal network of fractional order: A note on its numerical integration. Chaos Solitons Fractals 2021, 151, 111219. [Google Scholar] [CrossRef]
- Eckmann, J.P.; Ruelle, D. Ergodic theory of chaos and strange attractors. Rev. Mod. Phys. 1985, 57, 617–656. [Google Scholar] [CrossRef]
- Fečkan, M.; Marynets, K. Approximation approach to periodic BVP for fractional differential systems. Eur. Phys. J. Spec. Top. 2017, 226, 3681–3692. [Google Scholar] [CrossRef]
- Fečkan, M.; Marynets, K. Approximation approach to periodic BVP for mixed fractional differential systems. J. Comput. Appl. Math. 2018, 339, 208–217. [Google Scholar] [CrossRef]
- Feckan, M.; Marynets, K.; Wang, J. Periodic boundary value problems for higher-order fractional differential systems. Math. Methods Appl. Sci. 2019, 42, 3616–3632. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| E | |
|---|---|
| stable for | Unstable for all p and | stable for |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Danca, M.-F.; Fečkan, M.; Kuznetsov, N.; Chen, G. Coupled Discrete Fractional-Order Logistic Maps. Mathematics 2021, 9, 2204. https://doi.org/10.3390/math9182204
Danca M-F, Fečkan M, Kuznetsov N, Chen G. Coupled Discrete Fractional-Order Logistic Maps. Mathematics. 2021; 9(18):2204. https://doi.org/10.3390/math9182204
Chicago/Turabian StyleDanca, Marius-F., Michal Fečkan, Nikolay Kuznetsov, and Guanrong Chen. 2021. "Coupled Discrete Fractional-Order Logistic Maps" Mathematics 9, no. 18: 2204. https://doi.org/10.3390/math9182204
APA StyleDanca, M.-F., Fečkan, M., Kuznetsov, N., & Chen, G. (2021). Coupled Discrete Fractional-Order Logistic Maps. Mathematics, 9(18), 2204. https://doi.org/10.3390/math9182204