Abstract
We discuss a pair of nonlinear matrix equations (NMEs) of the form , , where , , , and the operators are continuous in the trace norm. We go through the necessary criteria for a common positive definite solution of the given NME to exist. We develop the concept of a joint Suzuki-implicit type pair of mappings to meet the requirement and achieve certain existence findings under weaker assumptions. Some concrete instances are provided to show the validity of our findings. An example is provided that contains a randomly generated matrix as well as convergence and error analysis. Furthermore, we offer graphical representations of average CPU time analysis for various initializations.
Keywords:
positive definite matrix; nonlinear matrix equation; fixed point; relational metric space; Suzuki contraction MSC:
47H10; 47H09; 45J05
1. Introduction and Preliminaries
Nonlinear matrix equations have long been a popular topic in nonlinear analysis. Control theory, dynamical programming, stochastic filtering, queuing theory, statistics, and a variety of other mathematical and physical fields use these equations regularly. Using partially ordering and the traditional Banach contraction theorem, Ran and Reurings [1,2] investigated the existence of solutions to matrix problems (in short, BCT). Turinici in [3] is a good place to start for early results in this regard. Indeed, Ran and Reurings [1] and Nieto and Rodriguez-Lopez [4,5] reinvestigated and examined this field (see also [6]). Abbas et al. [7] examined the occurrence of fixed points of T-Ćirić-type mappings in partially ordered spaces. For nonlinear contractions under symmetric closure of an arbitrary relation, Samet and Turinici [8] achieved some findings. Ahmadullah et al. [9,10,11,12] and Alam and Imdad [13] have recently utilized a binary relation to show a relation-theoretic counterpart of the BCT that unifies certain well-known relevant order-theoretic fixed point findings. Suzuki [14], on the other hand, discovered a surprising generalization of the BCT that describes metric completeness, i.e., a metric space is complete if and only if every Suzuki-type mapping has a fixed point in it.
Motivated by the preceding work, we present the concept of joint Suzuki-implicit type pair of mappings on arbitrary binary relation and establish certain existence findings under weaker assumptions. We provide some instance cases to show the veracity of our findings. We then apply these findings to nonlinear matrix equations. We also explore the convergence behavior of various initializations with graphical representations using MATLAB.
For the purpose of thoroughness, we will now review some notation, definitions, and outcomes. Throughout this article, the notations have their usual meanings, and .
We call a relational set if (i) is a set and (ii) is a binary relation on .
In addition, if is a metric space, we call a relational metric space (RMS, for short).
The following are some standard terms used in the theory of relational sets (see, e.g., [8,13,15,16,17]).
Let be a relational set, be an RMS, and let be self-mappings on . Then:
- is -related to if and only if ;
- The set is said to be complete if for all , where means that either or ;
- A sequence in is said to be -preserving if , ;
- is said to be -complete if every -preserving Cauchy sequence converges in X;
- is said to be -closed if . It is said to be weakly -closed if ;
- is said to be d-self-closed if for every -preserving sequence with , there is a subsequence of , such that , for all ;
- A subset of is called -directed if for each , there exists such that and . It is called -directed if for each , there exists such that and ;
- is said to be -continuous at if for every -preserving sequence converging to , we get as . Moreover, is said to be -continuous if it is -continuous at every point of ;
- For , a path of length k (where k is a natural number) in from to is a finite sequence satisfying the following conditions:
- (i)
- and ,
- (ii)
- for each i,
then this finite sequence is called a path of length k joining to in ; - If for a pair of , there is a finite sequence satisfying the following conditions:
- (i)
- and ,
- (ii)
- for each i ,
then this finite sequence is called a -path of length k joining to in .Notice that a path of length k involves elements of , although they are not necessarily distinct; - on is called -closed if whenever , for all .
- A subset of is called -directed if for each , there exists such that and ;
- is said to be -continuous at if for every -preserving sequence converging to , we get as . Moreover, is said to be -continuous if it is -continuous at every point of ;
- and are said to be -compatible if , whenever , for any sequence such that the sequences and are -preserving;
- For a pair of , there is a finite sequence satisfying the following conditions:
- (i)
- and ,
- (ii)
- for each i,
then this finite sequence is called a -path of length k joining to in .
Proposition 1
([13]). Let be a binary relation defined on a non-empty set Ξ. Then, .
We fix following notations for a relational space, self-mappings on and a -directed subset of ,
- (i)
- the set of all fixed points of ;
- (ii)
- ;
- (iii)
- the class of all paths in from to in , where ;
- (iv)
- the class of all -paths in from to in , where ;
- (v)
- the class of all -paths joining to in such that for each ;
- (vi)
- the set of all common fixed points of and ;
- (vii)
- the set of all coincidence points of and ;
- (viii)
- ;
- (ix)
- .
To complete the main result, we need:
Lemma 1
([18]). Let g be a self-mapping defined on a set . Then, there exists a subset with and is one-one.
2. Joint Suzuki-Implicit Type Results on Relational Metric Spaces
Let be the class of functions satisfying the following conditions:
- (i)
- is increasing and ;
- (ii)
- , for ; where is -iterate.
It should be noted that and the family .
Example 1.
Consider with usual metric, where . Define the mapping , where . Then, we have . Therefore, and hence .
Let satisfy the following conditions:
- ()
- for all , implies that there exists such that ;
- ()
- , for all .
Let and following additional conditions hold:
- ()
- , for all .
Obviously, is more general than .
The following examples are inspired from [19,20].
Example 2.
Let , and .
- ()
- For , we haveIf , then , a contradiction as . Therefore, , where ().
- ()
- for all .
Example 3.
Let and .
- ()
- For , we havewhich implies that . Then, . Hence, , where , .
- ()
- .
Example 4.
Let and ,similar to Example 3.
Example 5.
Let and .
- ()
- For , we havewhich implies that , that is, , where , .
- ()
- for all .
Example 6.
Let , and .
- ()
- For , we havewhich implies that , that is, , where , .
- ()
- for all .
Definition 1.
Let be an RMS and be given mappings. A pair of mappings is said to be a joint Suzuki-implicit type mapping if there exists such that for
We denote by Υ the collection of all joint Suzuki-implicit type mappings on .
Theorem 1.
Let be an RMS and an -complete subspace of Ξ. Let . Suppose that the following conditions hold:
- ()
- ;
- ()
- ;
- ()
- is -closed;
- ()
- ;
- ()
- (a)
- ,
- (b)
- is -continuous or and are continuous or is d-self-closed.
or, alternatively,- ()
- (c)
- and are -compatible,
- (d)
- is -continuous and either is -continuous or is -regular;
- (e)
- is continuous and either is -continuous or is -self-closed.
Then, .
Proof.
By , we can define a mapping g on satisfying for all . By , , therefore, from , holds, which implies that
It follows from that , such that
holds for all . Let . Put and for all . Then, and implies that
Using (), we have that . Continuing this process inductively, we obtain
for any . In addition,
for any so that is an -preserving sequence. By (2), we have
Using Equation (5) and the triangular inequality, for all with ,
Therefore, is an -preserving Cauchy sequence in . As and (due to ), therefore is an -preserving Cauchy sequence in . Owing to the -completeness of , the existence of with is ensured. Assume . As , there exists some such that
By the uniqueness of the limit, we have , so that .
Assume . Suppose that and are continuous. From Lemma 1, there exists a subset such that and is one-one. Now, define by
Since is one-one and , h is well defined. As and are continuous, so is h. On using the fact and the conditions and , we have and which ensures the availability of a sequence satisfying Equation (3). Take . Using Equations (6) and (7) and the continuity of h, we obtain
so that .
Next, assume that is d-self-closed. Since is -preserving in and , there is a subsequence of with , for all . Notice that, for all , implies that either or .
Now, we assert that for all
On the contrary, let there exist such that
Now, from Equations (5) and (9), we have
a contradiction and, therefore, Equation (8) remains true. This implies that either
holds for . Thus, there exists a subsequence of such that for . Then, for .
Applying the condition to , for all , for and, therefore, for with
or
Taking and using , the lower semi-continuity of and continuity of d, we obtain
It follows from that , that is, .
Alternatively, we suppose that holds. Firstly, assume that holds.
As (in view (3.1)), we notice that is an -preserving Cauchy sequence in . Since is -complete, there exists such that
As and are -preserving sequences (due to Equations (3) and (4)), utilizing the condition and Equation (10), we obtain
Using Equations (12) and (13) and the continuity of d, we have . Hence, . □
Theorem 2.
Let all the conditions of Theorem 1 hold and
- ()
- ,
then, and have a unique point of coincidence if . In addition, if
- ()
- is weakly compatible,
then is unique.
Proof.
Following Theorem 1, . Consider two arbitrary elements , so that
Claim 1..
In view of the hypothesis , there exists an -path (say, of length ℓ in from to , with
and
Define two constant sequences
and .
Then, using Equation (14), for all
Setting,
we construct the joint sequence , i.e., corresponding to each . Since (in view of Equations (15) and (16)), then, using Equation (5) and -closedness of , we obtain
, for each and for all ,
or,
, for each and for all .
Define , for all and for each . We assert that . Suppose on the contrary that . Since , either or, . For , , then applying condition (1), we have
or,
Taking lim inf as and using along with the lower semi-continuity of and Equation (18), we obtain
a contradiction (in view of ) and, hence, (for each
Similarly, if , then as above, we obtain (for each
Thus,
, for each .
Using Equation (14), and the triangular inequality, we have
so that implying thereby . Therefore, .
Claim 2. To proof . Let , i.e., . Since and commute at their coincidence points, we have
Set . Then, from Equation (19), . Hence, . From Claim I, we have
so that .
Claim 3. To proof is a singleton set. □
On the contrary, assume is another element in . Then, , and Thus, is a singleton set. □
Theorem 3.
If one replaces () of Theorem 2 by one of the following conditions
- (’)
- is complete;
- (”)
- is -directed and ,
then Theorem 2 is concluded.
Proof.
Let us assume that the condition holds. Take an arbitrary pair of points in . Owing to the hypothesis , there exist such that , . As is complete, which shows that is an -path of length 1 from to in , so that . The rest of the proof follows from Theorem 2.
Now, if the condition holds, then for any in , there is in such that and . As so that , and, hence, is an -path of length 2 joining to in . As , therefore . Hence, for each in . The rest of the proof follows from Theorem 2. □
Example 7.
Let be endowed with the usual metric Define a binary relation on Ξ by if and only if . Then, is a relational metric space. Next, define mappings by
Then, it is easy to verify that , since ; for ; is -closed. Let φ be as in Example 2 and define as follows:
where and It is easy to verify that Taking and Then, Equation (1) reduces to
and implies
We show that satisfy Equation (20). We divide the proof in three parts.
Let be such that and either or
Case 1.
and Then,
Case 2.
. Then,
Case 3.
and . Then,
Therefore, in all the cases, we have
which implies that
Thus, . In addition, it is easy to check that and are -compatible; is -continuous and is continuous. Therefore, by Theorem 1, it follows that . Indeed, we see that . In addition, the pair commutes at . Clearly, , for each . Clearly is unique.
Example 8 (Example 2 [14])] Let be endowed with the usual metric d. Then, is a complete metric space. Define a mapping by
Now, since and for every , the mapping does not satisfy Theorem 2 [14].
Now, we define a binary relation on Ξ by if and only if . Then, is a complete relational metric space. Let and and φ be as in Example 7. Define be for all Then, it is easy to verify that , since ; and is -closed.
For all we have
Therefore,
Thus, . In addition, it is easy to check that and are -compatible; is -continuous and is continuous. Therefore, by Theorem 1, it follows that . Indeed, we see that . In addition, the pair commutes at . Clearly, , for each . Clearly, is unique.
3. Application to Nonlinear Matrix Equations
Let stand for the set of all Hermitian matrices over , stand for the set of all positive semi-definite matrices, stand for the set of positive definite matrices, stand for the set of all matrices over .
For a matrix , we denote by any of its singular values and by the sum of all of its singular values, that is, the trace norm . For , (resp. ) means that the matrix is positive semi-definite (resp. positive definite).
The following lemmas are needed in the subsequent discussion.
Lemma 2 ([1])
If and are matrices, then
Lemma 3 ([1])
If such that , then .
Consider the NME
where , , , and the operators are continuous in the trace norm.
Theorem 4.
Consider the problem described by Equation (21). Assume that:
- (H1)
- There exist , such that , ;
- (H2)
- , ;
- (H3)
- There exists such that
- (H4)
- If is a sequence such that with for all , then there exists a subsequence of with (or ), for all ;
- (H5)
- For every such that with
- (H6)
- For every such that with , ifholds, then, for
Then, the matrix equation (21) has a unique solution.
Proof.
Let us consider the set , which is a closed subset of .
Define now the operators by
for . It is clear that finding positive definite solution(s) of the system (21) is equivalent to finding common fixed point(s) of and .
Define a binary relation
Notice that and are well defined. From assumption , , and from , is -closed. Following assumption , is -self-closed.
Now, for , from assumption , we have
Then,
Consider given by where . Thus, all the hypotheses of Theorem 1 are satisfied and, therefore, there exists such that , and hence, the matrix equation (21) has a solution in . □
Example 9.Consider the following nonlinear equations:
Consider matrices , , , as
==.
The initial matrices are
.
To test our algorithm, we take , , , tolerance: tol=1e-14 and , . The numerical results are given in Table 1.

Table 1.
Three analyses based on initialization.
After 8 successive iterations, we obtain the following coincidence point
,
. The graphical view of convergence and surface graph of are shown in Figure 1 and Figure 2, respectively:
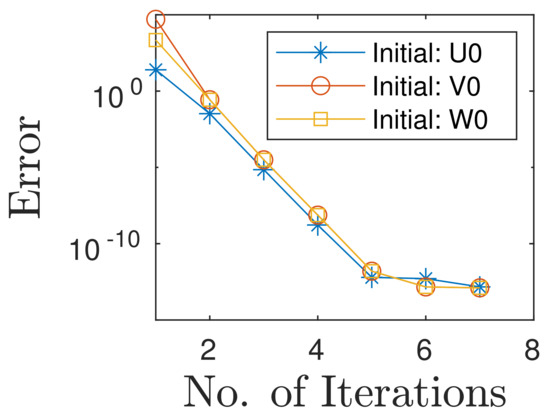
Figure 1.
Convergence behavior.
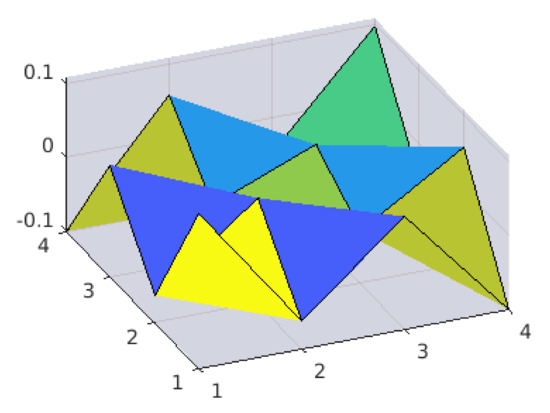
Figure 2.
Surface plot.
Author Contributions
Writing—review and editing, H.K.N., R.P. and R.G. All authors have read and agreed to the published version of the manuscript.
Funding
This research is funded by the Foundation for Science and Technology Development of Ton Duc Thang University (FOSTECT), website: http://fostect.tdtu.edu.vn, under Grant FOSTECT.2019.14.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
This research is supported by the Deanship of Scientific Research, Prince Sattam bin Abdulaziz University, Alkharj, Saudi Arabia. We would like to express our gratitude to the editor for his generous assistance. We are also grateful to the educated referee for providing us with helpful comments that enabled us to make some improvements to the text.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ran, A.C.M.; Reurings, M.C.B. On the matrix equation X + A*F(X)A = Q: Solutions and perturbation theory. Linear Algebr. Appl. 2002, 346, 15–26. [Google Scholar] [CrossRef] [Green Version]
- Ran, A.C.M.; Reurings, M.C.B. A fixed point theorem in partially ordered sets and some applications to matrix equations. Proc. Am. Math. Soc. 2004, 132, 1435–1443. [Google Scholar] [CrossRef]
- Turinici, M. Fixed points for monotone iteratively local contractions. Demonstr. Math. 1986, 19, 171–180. [Google Scholar]
- Nieto, J.J.; López, R.R. Contractive mapping theorems in partially ordered sets and applications to ordinary differential equations. Order 2005, 22, 223–239. [Google Scholar] [CrossRef]
- Nieto, J.J.; López, R.R. Fixed point theorems in ordered abstract spaces. Proc. Am. Math. Soc. 2007, 135, 2505–2517. [Google Scholar] [CrossRef]
- Kanel-Belov, A.; Malev, S.; Rowen, L.; Yavich, R. Evaluations of noncommutative polynomials on algebras: Methods and problems, and the Lvov-Kaplansky conjecture. SIGMA Symmetry Integr. Geom. Methods Appl. 2020, 16, 61. (In English) [Google Scholar] [CrossRef]
- Abbas, M.; Parvaneh, V.; Razani, A. Periodic points of T-Ćirić generalized contraction mappings in ordered metric spaces. Georgian Math. J. 2012, 19, 597–610. [Google Scholar] [CrossRef]
- Samet, B.; Turinici, M. Fixed point theorems on a metric space endowed with an arbitrary binary relation and applications. Commun. Math. Anal. 2012, 13, 82–97. [Google Scholar]
- Ahmadullah, M.; Ali, J.; Imdad, M. Unified relation-theoretic metrical fixed point theorems under an implicit contractive condition with an application. Fixed Point Theory Appl. 2016, 2016, 42. [Google Scholar] [CrossRef] [Green Version]
- Ahmadullah, M.; Imdad, M. Unified relation-theoretic fixed point results via FR-Suzuki-contractions with an application. Fixed Point Theory Appl. 2020, 21, 19–34. [Google Scholar] [CrossRef]
- Ahmadullah, M.; Imdad, M.; Arif, M. Relation-theoretic metrical coincidence and common fixed point theorems under nonlinear contractions. Appl. Gen. Topol. 2018, 19, 65–84. [Google Scholar] [CrossRef] [Green Version]
- Ahmadullah, M.; Imdad, M.; Arif, M. Common fixed point theorems under an implicit contractive condition on metric spaces endowed with an arbitrary binary relation and an application. Asian Eur. J. Math. 2021, 14, 2050146. [Google Scholar] [CrossRef] [Green Version]
- Alam, A.; Imdad, M. Relation-theoretic contraction principle. J. Fixed Point Theory Appl. 2015, 17, 693–702. [Google Scholar] [CrossRef]
- Suzuki, T. A generalized Banach contraction principle which characterizes metric completness. Proc. Am. Math. Soc. 2008, 136, 1861–1869. [Google Scholar] [CrossRef]
- Kolman, B.; Busby, R.C.; Ross, S. Discrete Mathematical Structures, 3rd ed.; PHI Pvt. Ltd.: New Delhi, India, 2000. [Google Scholar]
- Lipschutz, S. Schaum’s Outlines of Theory and Problems of Set Theory and Related Topics; McGraw-Hill: New York, NY, USA, 1964. [Google Scholar]
- Maddux, R.D. Relation algebras. In Studies in Logic and Foundations of Mathematics; Elsevier B.V.: Amsterdam, The Netherlands, 2006; p. 150. [Google Scholar]
- Haghi, R.H.; Rezapour, S.; Shahzad, N. Some fixed point generalizations are not real generalizations. Nonlinear Anal. 2011, 74, 1799–1803. [Google Scholar] [CrossRef]
- Aliouche, A.; Djoudi, A. Common fixed point theorems for mappings satisfying an implicit relation without decreasing assumption. Hacet. J. Math. Stat. 2007, 36, 11–18. [Google Scholar]
- Popa, V.; Mocanu, M. Altering distance and common fixed points under implicit relations. Hacet. J. Math. Stat. 2009, 38, 329–337. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).