Abstract
In the present paper, we mainly focus on the symmetry of the solutions of a given PDE via Lie group method. Meanwhile we transfer the given PDE to ODEs by making use of similarity reductions. Furthermore, it is shown that the given PDE is self-adjoining, and we also study the conservation law via multiplier approach.
1. Introduction
When investigating the classification of the solutions of differential equations, Sophus Lie introduced the notion of the continuous transformation group, which was named the Lie group by the following people in memory of him. Afterwards, the application of Lie groups has been developed by lots of mathematicians, such as Ovsiannikov [1], Ibragimov [2], Olver [3] and Bluman et al. [4,5]. Symmetry is one of the intrinsic features of a partial differential equation (PDE). Lie group analysis is one of the most powerful methods to study the symmetry of their solutions. Based on the symmetries of a PDE, many other properties of the equation, such as exact solutions to conservation laws can be successively considered. In any case, another method to solve the nonlinear evolution equation (such as Burgers equation) is to use Hopf cole transformation in a high order spectral column setting [6,7].
The conservation laws (Cls) have drawn great attention from the mathematical physicists. In the past few decades, many methods for dealing with the Cls were derived, the most famous being Noether’s approach [8], multiplier approach and Ibragimov’s method [9]. Moreover, Cls for nonlinearly self-adjoint systems can be constructed systematically by pairs of symmetries and adjoint symmetries. In particular, ref. [10] supplies the most general connection between Cls and pairs of symmetries and adjoint symmetries for non-self-adjoint systems. On the contribution of the Lie symmetry method, significant studies have been performed on the integrability of the nonlinear PDEs, group classification, optimal system, reduced solutions and conservation laws, such as [11,12,13,14,15,16,17,18,19,20,21,22,23], and references therein.
In [24,25], a new completely integrable equation
was proposed. It was shown that this equation has no smooth solitons and it has bi-Hamiltonian structure and Lax pair. At the end of [25], Qiao introduced a more general PDE
with a constant .
If , it is a trivial case; if , it is a linear case; if , it is a Harry–Dym case; if , it is reduced to (1). Unless explicitly stated, throughout this paper we always assume . Sakovich in [26] supplied a transformation which was used to derive smooth soliton solutions of the new equation from the known rational and soliton solutions of the old one. To the authors’ knowledge, the Lie symmetry analysis, self-adjointness and conservation laws of (2) have not been studied. In this paper, we mainly focus on the above aspects on (2) for .
If we perform the transformation , Equation (2) is reduced to
2. Lie Symmetries of Equation (2)
In this section, we shall investigate the Lie symmetry analysis of Equation (2).
First of all, let us consider the Lie group of point transformations
with a small parameter . The vector field associated with the above transformation group of transformations can expressed as
where , and are coefficient functions of the vector field to be determined.
Theorem 1.
Proof.
The third prolongation of V is
where the explicit expressions of unknown functions are as follows
In (9)–(12), and are both total derivatives with respect to , respectively. We denote the left hand side of Equation (2) by . In view of , we obtain
We substitute (9)–(12) into (8) and replace by
whenever it appears in (13) and divide it into several cases to discuss it.
Firstly we assume . By solving (13), one can get following forms for the infinitesimal elements :
Secondly, we assume or , similar process yields the vector fields in (6). □
It is necessary to check that the vector fields form a Lie algebra, respectively. Taking (7) as an example,
We denote this Lie algebra by . If we drop the relation in (7) of , it will be an abstract Lie algebra. The vector fields corresponding to supply a Lie algebra representation of (see [27]). In addition, can be decomposed as , where denotes the simple ideal of , stands for the nilpotent subalgebra of .
As we know, infinitesimal generators generate the one-parameter transform groups, by solving the following ordinary differential equations with the initial conditions:
it follows the case
and case
Remark 1.
Remark 2.
If , Equation (2) is also invariant under the operation of the prolongations of –. We take as an example, since the prolongations of and are trivial.
Remark 3.
If , Equation (2) is invariant under the operation of the prolongations of –. For instance
3. Similarity Reductions for Equation (2)
In this section, we shall construct the similarity variables so as to deal with the symmetry reduction, which transfer the PDE into ODE. Considering the fact that the vector fields of and are partly the same, we shall discuss them together.
For the generator , we assume , and obtain the trivial solution , where c is an arbitrary nonzero constant.
For the linear combination , we have
where . Substituting (23) into Equation (2), we can get
where .
For the generator , we have
where . By substituting (27) into Equation (2), we get the trivial solution , where c is an arbitrary nonzero constant.
For the generator , we have
where , we get the trivial solution , where c is an arbitrary nonzero constant.
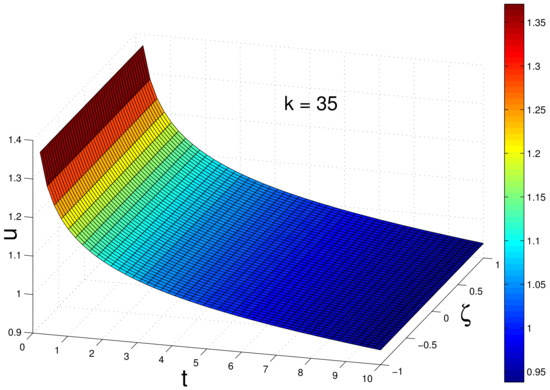
The ODEs (24) and (26) hold for arbitrary k, including , but the similarity reductions of and only belong to the equation when .
In the above, we sketch the graphs of in Equations (24) and (26) and 3D-plot of in Equations (23)–(26) under initial conditions . Please refer to Figure 1, Figure 2, Figure 3, Figure 4, Figure 5 and Figure 6.
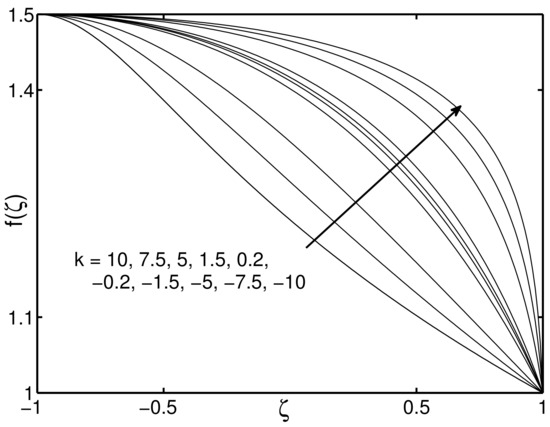
Figure 1.
The graph of given by Equation (24) as k near 0.
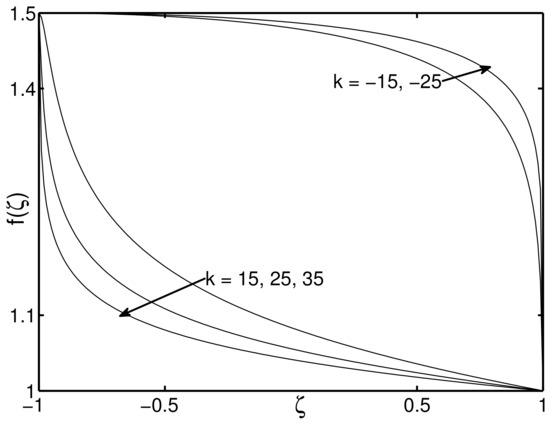
Figure 2.
The graph of given by Equation (24) as k approaching and .
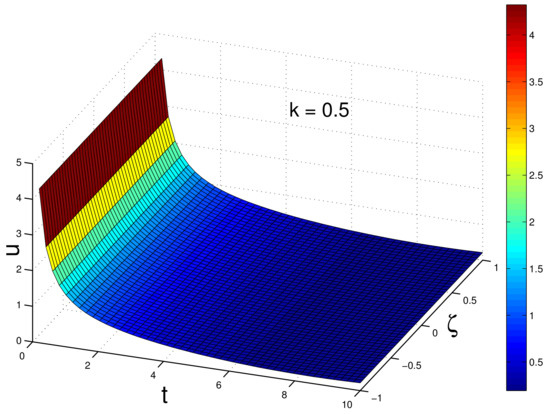
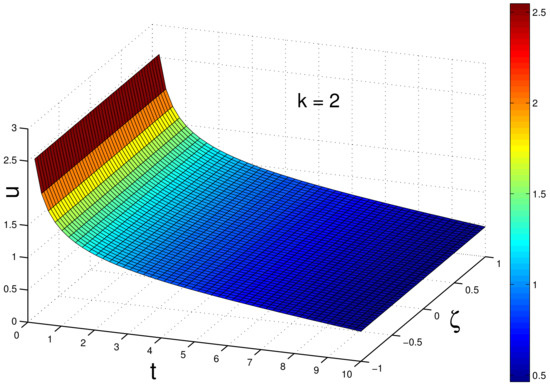
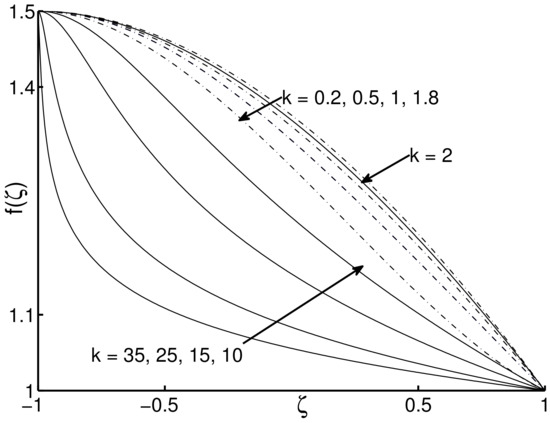
Figure 5.
The graph of given by Equation (26) as k near 0.
4. Nonlinear Self-Adjointness and Conservation Law
For given PDEs
define the Euler–Lagrange operator
and the formal Lagrangian
The adjoint equations is given by
Theorem 2.
The differential Equation (2) is self-adjoining if and only if .
Proof.
It is obvious that and . The formal Lagrangian is
Substituting it into , we have the adjoint equation of Equation (2)
By means of
we have
which completes the proof. □
We will now investigate the conservation law for Equation (2) by multiplier. For the differential Equation (29) with , we suppose is its multiplier and ’s are its conserve vectors, then satisfies the property
Therefore the conserved vectors for Equation (2) are
5. Discussion
We suggest a more general PDE:
with and . If , it becomes Equation (2). The Lie symmetry and similarity reductions and the soliton solutions can be researched in the near future.
6. Conclusions
In this paper, the vector fields which make the equation under consideration symmetry are obtained. The Lie algebras and Lie transformation groups are performed. Moreover, it is pointed out that the vector fields supply a representation of the Lie algebra.
By the similarity reductions the equation under consideration is transferred to ODEs.
It is shown that the equation under consideration is nonlinear adjoint if and only if . The conserved vectors are obtained by multiplier method.
The vector fields generate the equation under consideration supply a representation of a Lie algebra. However, for a given finitely dimensional Lie algebra, such as nine types of simply Lie algebras, how to get its representation via vector fields? If we have already obtained the vector fields, can we get the differential equation which generates the vector field? If the differential equation is obtained, is it unique? All of them are the aims that we will study in the near future.
Author Contributions
H.W. undertook the study of the whole system and writing of the main body of the article. Z.Z. contributed the graphs of the paper. X.S. performed some of the calculations in this article. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by National Natural Science Foundation of China (Grant No. 11801264), Hunan Provincial Natural Science Foundation of China (Grant No. 2019JJ50505, 2019JJ50 490, 2019JJ40240) and Scientific Research Foundation of Hunan Province Education Department (Grant No. 18C0455).
Acknowledgments
Theauthorsappreciatethevaluablesuggestionsofreviewersandeditors. The authors are also indebted to Lin Li for his six graphs.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ovsiannikov, L.V. Group Analysis of Differential Equations; Elsevier: Cambridge, MA, USA, 1982. [Google Scholar]
- Ibragimov, N.H. Transformation Groups Applied to Mathematical Physics; Reidel Publishing Company: Dort, NL, USA, 1985. [Google Scholar]
- Olver, P.J. Applications of Lie Groups to Differential Equations; Grauate Texts in Mathematics; Springer: New York, NY, USA, 1993; Volume 107. [Google Scholar]
- Bluman, G.W.; Kumei, S. Symmetries and Differential Equations; World Publishing Corp.: New York, NY, USA, 1989. [Google Scholar]
- Bluman, G.W.; Anco, S.C. Symmetry and Integration Methods for Differential Equations; Applied Mathematical Sciences; Springer: New York, NY, USA, 2002; Volume 154. [Google Scholar]
- Kannan, R.; Wang, Z.J. A high order spectral volume solution to the Burgers equation using the Hopf—Cole transformation. Int. J. Numer. Meth. Fluids 2012, 69, 781–801. [Google Scholar] [CrossRef]
- Kannan, R. A High Order Spectral Volume Formulation for Solving Equations Containing Higher Spatial Derivative Terms II: Improving the Third Derivative Spatial Discretization Using the LDG2 Method. Commun. Comput. Phys. 2012, 12, 767–788. [Google Scholar] [CrossRef]
- Noether, E. Invariante Variationsprobleme, Königliche Gesellschaft der Wissenschaften zu Göttingen, Nachrichten. Mathematisch-Physikalische Klasse 1918, 2, 235–257, English transl.: Transp. Theory Statist. Phys. 1971, 1, 186–207. [Google Scholar]
- Ibragimov, N.H. A new conservation theorem. J. Math. Anal. Appl. 2007, 333, 311–328. [Google Scholar] [CrossRef]
- Ma, W.X. Conservation laws by symmetries and adjoint symmetries. Discrete Cont. Dyn.-A 2018, 11, 707–721. [Google Scholar] [CrossRef]
- Kozlov, R. Lie point symmetries of Stratonovich stochastic differential equations. J. Phys. A-Math. Theor. 2018, 5. [Google Scholar] [CrossRef]
- Liu, H.Z.; Li, J.B. Lie symmetry analysis and exact solutions for the short pulse equation. Nonlinear Anal.-Theor. 2009, 71, 2126–2133. [Google Scholar] [CrossRef]
- Liu, H.Z.; Li, J.B.; Liu, L. Lie group classifications and exact solutions for twovariable-coefficient equations. Appl. Math. Comput. 2009, 215, 2927–2935. [Google Scholar]
- Liu, H.Z.; Li, J.B. Lie Symmetries, Conservation Laws and Exact Solutions for Two Rod Equations. Acta Appl. Math. 2010, 110, 573–587. [Google Scholar] [CrossRef]
- Liu, H.Z.; Li, J.B.; Liu, L. Lie symmetry analysis, optimal systems and exact solutions to the fifth-order KdV types of equations. J. Math. Anal. Appl. 2010, 368, 551–558. [Google Scholar] [CrossRef]
- Liu, H.Z.; Li, J.B.; Liu, L. Group Classifications, Symmetry Reductions and Exact Solutions to the Nonlinear Elastic Rod Equations. Adv. Appl. Cliffor. Algebr. 2012, 22, 107–122. [Google Scholar] [CrossRef]
- Nadjafikhah, M.; Ahangari, F. Symmetry Analysis and Conservation Laws for the Hunter—Saxton Equation. Commun. Theor. Phys. 2013, 59, 335–348. [Google Scholar] [CrossRef]
- Qin, C.Y.; Tian, S.F.; Zou, L.; Zhang, T.T. Lie Symmetry Analysis, Conservation Laws and Exact Solutions of Fourth-order Time Fractional Burgers Equation. J. Appl. Anal. Comput. 2018, 8, 1727–1746. [Google Scholar]
- Rashidi, S.; Hejazi, S.R. Lie symmetry approach for the Vlasov-Maxwell system of equations. J. Geom. Phys. 2018, 132, 1–12. [Google Scholar] [CrossRef]
- Zhang, Z.Y.; Yong, X.L.; Chen, Y.F. Symmetry analysis for Whitham-Broer-Kaup equations. J. Nonlinear Math. Phys. 2008, 15, 383–397. [Google Scholar] [CrossRef]
- Zhang, Y.F.; Mei, J.Q.; Zhang, X.Z. Symmetry properties and explicit solutions of some nonlinear differential and fractional equations. Appl. Math. Comput. 2018, 337, 408–418. [Google Scholar] [CrossRef]
- Zhao, Z.L.; Han, B. On optimal system, exact solutions and conservation laws of the Broer-Kaup system. Eur. Phys. J. Plus 2015, 130, 223. [Google Scholar] [CrossRef]
- Zhao, Z.L.; Han, B. Lie symmetry analysis of the Heisenberg equation. Commun. Nonlinear Sci. Numer. Simulat. 2017, 45, 220–234. [Google Scholar] [CrossRef]
- Qiao, Z.J. New integrable hierarchy, its parametric solutions, cuspons, one-peak solitons, and M/W-shape peak solitons. J. Math. Phys. 2007, 48, 082701. [Google Scholar] [CrossRef]
- Qiao, Z.J.; Liu, L.P. A new integrable equation with no smooth solitons. Chaos Soliton Fractals 2009, 41, 587–593. [Google Scholar] [CrossRef]
- Sakovich, S. Smooth soliton solutions of a new integrable equation by Qiao. J. Math. Phys. 2011, 52. [Google Scholar] [CrossRef]
- Humphreys, J.E. Introduction to Lie Algebras and Representation Theory; Springer: New York, NY, USA, 1972. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).