
High-Performance Tracking for Proton Exchange Membrane Fuel Cell System PEMFC Using Model Predictive Control



Abstract
1. Introduction
2. Materials and Methods
2.1. Hardware Description
- PEM FC50: The technical data of the PEM FC50 are described in Table 2. The fuel stack is supplied by hydrogen through a metal hydride storage cylinder 60 SL, which is connected to the manometer that decreases the pressure. The stack contains 10 cells stacked in series and generates a rated power of 40 W.
- DC–DC boost converter: The power converter used in the test bench is constructed by the TEP-192-Research Group of Huelva University. Unlike the commercial converters, this boost converter offers a PWM control input where the controller could be designed via the user. It is characterized by an IGBT transistor with an input switching frequency equal to 20 kHz; the maximum input voltage and current are, respectively, equal to 60 V and 30 A with an accuracy of ; while, the maximum output voltage and current are around 250 V and 30 A.
- MicroLabBox dSPACE DS1202: The dSPACE-DS1202 is an effective device for fast control systems due to its high performance when turning the theoretical design into a real-time experiment. The device includes more than 100 various type of input/output channels with a dual core processor and independent co-processor that manages host PC communication. By adding the library of real-time implementation (RTI) in a Simulink–Matlab interface, it allows the use of the basic toolboxes in order to configure all the I/O sensors as well as the PWM signal required for controlling the system. Then, a generated C code will be sent to the MicroLabBox by the RTI when compiling the Simulink model. Hence, a PWM pulse is produced using the converted code given by the MicroLabBox. The control desk software is used for creating an interface with the graphical user interface (GUI), which allows to visualize and observe the online evolution of the obtained signals with clear figures that make the online evaluation of the different parameter changes easier and faster.
- Electronic programmable load: The characteristics of the electronic programmable load used in this work are described in Table 3. The experimental tests were carried out under an abrupt change of the load resistance through an electronic programmable load BK 8500B. The latter is used instead of the classical manual sliding resistive load since the programmable device cloud provides considerable advantages such as generating a list of resistance waveform sequence with speed, accurate values and high resolution in real-time.
2.2. Control Design
- Modeling the power converter and determining its state-space model.
- Obtaining the discrete time state-space model that allows the prediction of the future behavior.
- Defining the cost function J that represents the desired behavior of the system.
- Determining the MPC control law that minimizes the cost function J.
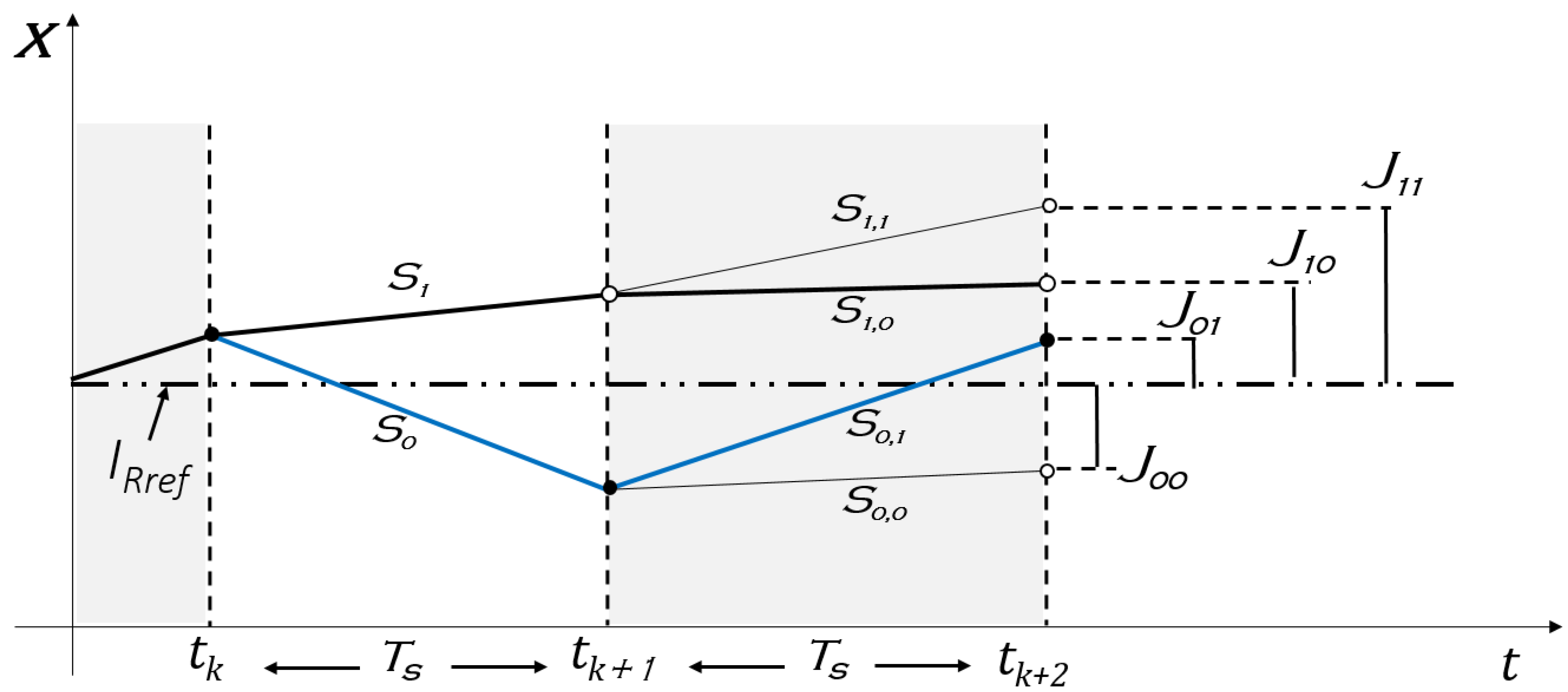
- The first one is to evaluate the cost function at each step (sampling time). For instance, by taking the example presented in Figure 6 where the performed switching actions are indicated with the bold black line; at first, when the sampling time is , the controller has to choose between and , where the choice is based on the most preferred switching condition that leads to minimizing the cost function J. Since is selected in this example, it means that the predicted controlled variable that corresponds to is the closest to the desired reference . Following the same criterion for the two-step horizon at which the sampling time is , the controller will decide between and . Since is selected, then, the cost function is performed and considered as the cost function of the previous step at the sampling time . However, despite the simplicity of this strategy, it may fall in a local lower cost function since the cost functions and that, respectively, correspond to the switching states and , were not evaluated.
- The second strategy is to evaluate the cost functions of all the sets of switching states given in Equation (15), and finally, the lowest cost function is performed. The performed switching actions using this method are indicated with the bold blue line. The main feature of this method is its capability to calculate the global lower cost function for the two-step horizon. Therefore, a new cost function for the two-step prediction horizon is defined in Equation (16). The latter is composed of the error at the sampling time plus the error at the sampling time .
2.3. Performance Metrics Used
3. Results
Performance Metrics Comparison
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PEM | polymer electrolyte membrane |
| PEMFC | polymer electrolyte membrane fuel cell |
| MPC | model predictive control |
| PI | proportional-integral |
| PD | proportional derivative |
| PID | proportional integral derivative |
| FOPID | fractional order PID |
| FSBB | four-switch buck-boost |
| TZTP | two-zero/three-pole |
| PID-SSA | PID based slap swarm algorithm |
| IRA | incremental resistance algorithm |
| MBA | mine-blast algorithm |
| GWM | grey wolf optimizer |
| P&O | perturb and observe |
| FLC | fuzzy logic control |
| FLC-PSO | FLC based on particle swarm optimization |
| ANFIS | adaptive neuro-fuzzy inference system |
| NNA | neural network algorithm |
| GA | genetic algorithm |
| IC | incremental conductance |
| PSO | particle swarm optimization |
| ACO | ant colony optimization |
| DE | differential evolution |
| SMC | sliding mode control |
| IFTSMC | integral fast terminal sliding mode control |
| BSMC | back-stepping sliding mode control |
| TA | twisting algorithm |
| STA | super-twisting algorithm |
| PCL | prescribed convergence law |
| QC | quasi-continuous algorithm |
| MPPT | maximum power point tracking |
| EKF | extended Kalman filter |
| PWM | pulse width modulation |
| IAE | integral of the absolute error |
| RMSE | root mean square error |
| RRMSE | relative root mean square error |
References
- Magoon, C.R., Jr. Creation and the Big Bang: How God Created Matter from Nothing; WestBow Press: Edinburgh, UK, 2018. [Google Scholar]
- Choudhury, D.; Kraft, D.W. Big Bang Nucleosynthesis and the Missing Hydrogen Mass in the Universe. AIP Conf. Proc. 2004, 698, 345–348. [Google Scholar]
- Derbeli, M.; Farhat, M.; Barambones, O.; Sbita, L. Control of PEM fuel cell power system using sliding mode and super-twisting algorithms. Int. J. Hydrogen Energy 2017, 42, 8833–8844. [Google Scholar] [CrossRef]
- Thounthong, P.; Mungporn, P.; Pierfederici, S.; Guilbert, D.; Bizon, N. Adaptive Control of Fuel Cell Converter Based on a New Hamiltonian Energy Function for Stabilizing the DC Bus in DC Microgrid Applications. Mathematics 2020, 8, 2035. [Google Scholar] [CrossRef]
- Bizon, N.; Thounthong, P. A Simple and Safe Strategy for Improving the Fuel Economy of a Fuel Cell Vehicle. Mathematics 2021, 9, 604. [Google Scholar] [CrossRef]
- Bizon, N.; Thounthong, P. Energy efficiency and fuel economy of a fuel cell/renewable energy sources hybrid power system with the load-following control of the fueling regulators. Mathematics 2020, 8, 151. [Google Scholar] [CrossRef]
- Bahrami, M.; Martin, J.P.; Maranzana, G.; Pierfederici, S.; Weber, M.; Meibody-Tabar, F.; Zandi, M. Multi-stack lifetime improvement through adapted power electronic architecture in a fuel cell hybrid system. Mathematics 2020, 8, 739. [Google Scholar] [CrossRef]
- Derbeli, M.; Farhat, M.; Barambones, O.; Sbita, L. Control of proton exchange membrane fuel cell (pemfc) power system using pi controller. In Proceedings of the IEEE 2017 International Conference on Green Energy Conversion Systems (GECS), Hammamet, Tunisia, 23–25 March 2017; pp. 1–5. [Google Scholar]
- Rubio, J.D.J.; Bravo, A.G. Optimal control of a PEM fuel cell for the inputs minimization. Math. Probl. Eng. 2014, 2014. [Google Scholar] [CrossRef]
- Belhaj, F.Z.; El Fadil, H.; Idrissi, Z.E.; Koundi, M.; Gaouzi, K. Modeling, Analysis and Experimental Validation of the Fuel Cell Association with DC-DC Power Converters with Robust and Anti-Windup PID Controller Design. Electronics 2020, 9, 1889. [Google Scholar] [CrossRef]
- Qi, Z.; Tang, J.; Pei, J.; Shan, L. Fractional controller design of a DC-DC converter for PEMFC. IEEE Access 2020, 8, 120134–120144. [Google Scholar] [CrossRef]
- Fathy, A.; Abdelkareem, M.A.; Olabi, A.; Rezk, H. A novel strategy based on salp swarm algorithm for extracting the maximum power of proton exchange membrane fuel cell. Int. J. Hydrogen Energy 2021, 46, 6087–6099. [Google Scholar] [CrossRef]
- Derbeli, M.; Sbita, L.; Farhat, M.; Barambones, O. Proton exchange membrane fuel cell—A smart drive algorithm. In Proceedings of the IEEE 2017 International Conference on Green Energy Conversion Systems (GECS), Hammamet, Tunisia, 23–25 March 2017; pp. 1–5. [Google Scholar]
- Luta, D.N.; Raji, A.K. Fuzzy rule-based and particle swarm optimisation MPPT techniques for a fuel cell stack. Energies 2019, 12, 936. [Google Scholar] [CrossRef]
- Reddy, K.J.; Sudhakar, N. ANFIS-MPPT control algorithm for a PEMFC system used in electric vehicle applications. Int. J. Hydrogen Energy 2019, 44, 15355–15369. [Google Scholar] [CrossRef]
- Reddy, K.J.; Sudhakar, N. High voltage gain interleaved boost converter with neural network based MPPT controller for fuel cell based electric vehicle applications. IEEE Access 2018, 6, 3899–3908. [Google Scholar] [CrossRef]
- Chorfi, J.; Zazi, M.; Mansori, M. A new intelligent MPPT based on ANN algorithm for photovoltaic system. In Proceedings of the IEEE 2018 6th International Renewable and Sustainable Energy Conference (IRSEC), Rabat, Morocco, 5–8 December 2018; pp. 1–6. [Google Scholar]
- Hadji, S.; Gaubert, J.P.; Krim, F. Real-time genetic algorithms-based MPPT: Study and comparison (theoretical an experimental) with conventional methods. Energies 2018, 11, 459. [Google Scholar] [CrossRef]
- Khanam, N.; Khan, B.H.; Imtiaz, T. Maximum Power Extraction of Solar PV System using Meta-Heuristic MPPT techniques: A Comparative Study. In Proceedings of the IEEE 2019 International Conference on Electrical, Electronics and Computer Engineering (UPCON), Aligarh, India, 8–10 November 2019; pp. 1–6. [Google Scholar]
- Derbeli, M.; Barambones, O.; Farhat, M.; Sbita, L. Efficiency Boosting for Proton Exchange Membrane Fuel Cell Power System Using New MPPT Method. In Proceedings of the IEEE 2019 10th International Renewable Energy Congress (IREC), Sousse, Tunisia, 26–28 March 2019; pp. 1–4. [Google Scholar]
- Derbeli, M.; Barambones, O.; Ramos-Hernanz, J.A.; Sbita, L. Real-time implementation of a super twisting algorithm for PEM fuel cell power system. Energies 2019, 12, 1594. [Google Scholar] [CrossRef]
- Silaa, M.Y.; Derbeli, M.; Barambones, O.; Napole, C.; Cheknane, A.; Gonzalez De Durana, J.M. An Efficient and Robust Current Control for Polymer Electrolyte Membrane Fuel Cell Power System. Sustainability 2021, 13, 2360. [Google Scholar] [CrossRef]
- Derbeli, M.; Barambones, O.; Sbita, L. A robust maximum power point tracking control method for a PEM fuel cell power system. Appl. Sci. 2018, 8, 2449. [Google Scholar] [CrossRef]
- Derbeli, M.; Barambones, O.; Farhat, M.; Ramos-Hernanz, J.A.; Sbita, L. Robust high order sliding mode control for performance improvement of PEM fuel cell power systems. Int. J. Hydrogen Energy 2020, 45, 29222–29234. [Google Scholar] [CrossRef]
- Derbeli, M.; Barambones, O.; Silaa, M.Y.; Napole, C. Real-Time Implementation of a New MPPT Control Method for a DC-DC Boost Converter Used in a PEM Fuel Cell Power System. Actuators 2020, 9, 105. [Google Scholar] [CrossRef]
- Silaa, M.Y.; Derbeli, M.; Barambones, O.; Cheknane, A. Design and Implementation of High Order Sliding Mode Control for PEMFC Power System. Energies 2020, 13, 4317. [Google Scholar] [CrossRef]
- Lashab, A.; Sera, D.; Guerrero, J.M. A dual-discrete model predictive control-based MPPT for PV systems. IEEE Trans. Power Electr. 2019, 34, 9686–9697. [Google Scholar] [CrossRef]
- Güler, N.; Irmak, E. MPPT Based Model Predictive Control of Grid Connected Inverter for PV Systems. In Proceedings of the 2019 8th International Conference on Renewable Energy Research and Applications (ICRERA), Brasov, Romania, 3–6 November 2019; pp. 982–986. [Google Scholar]
- Golzari, S.; Rashidi, F.; Farahani, H.F. A Lyapunov function based model predictive control for three phase grid connected photovoltaic converters. Solar Energy 2019, 181, 222–233. [Google Scholar] [CrossRef]
- Ahmed, M.; Abdelrahem, M.; Kennel, R. Highly Efficient and Robust Grid Connected Photovoltaic System Based Model Predictive Control with Kalman Filtering Capability. Sustainability 2020, 12, 4542. [Google Scholar] [CrossRef]
- Irmak, E.; Güler, N. A model predictive control-based hybrid MPPT method for boost converters. Int. J. Electr. 2020, 107, 1–16. [Google Scholar] [CrossRef]
- Abdel-Rahim, O.; Wang, H. A new high gain DC-DC converter with model-predictive-control based MPPT technique for photovoltaic systems. CPSS Trans. Power Electr. Appl. 2020, 5, 191–200. [Google Scholar] [CrossRef]
- Xue, D.; El-Farra, N.H. Forecast-triggered model predictive control of constrained nonlinear processes with control actuator faults. Mathematics 2018, 6, 104. [Google Scholar] [CrossRef]
- Wong, W.C.; Chee, E.; Li, J.; Wang, X. Recurrent neural network-based model predictive control for continuous pharmaceutical manufacturing. Mathematics 2018, 6, 242. [Google Scholar] [CrossRef]
- Zhang, Z.; Wu, Z.; Rincon, D.; Christofides, P.D. Real-time optimization and control of nonlinear processes using machine learning. Mathematics 2019, 7, 890. [Google Scholar] [CrossRef]
- Durand, H. Responsive economic model predictive control for next-generation manufacturing. Mathematics 2020, 8, 259. [Google Scholar] [CrossRef]
- Banholzer, S.; Fabrini, G.; Grüne, L.; Volkwein, S. Multiobjective model predictive control of a parabolic advection-diffusion-reaction equation. Mathematics 2020, 8, 777. [Google Scholar] [CrossRef]
- Aziz, A.G.M.A.; Rez, H.; Diab, A.A.Z. Robust Sensorless Model-Predictive Torque Flux Control for High-Performance Induction Motor Drives. Mathematics 2021, 9, 403. [Google Scholar] [CrossRef]
- Rodriguez, J.; Kazmierkowski, M.P.; Espinoza, J.R.; Zanchetta, P.; Abu-Rub, H.; Young, H.A.; Rojas, C.A. State of the Art of Finite Control Set Model Predictive Control in Power Electronics. IEEE Trans. Ind. Inform. 2013, 9, 1003–1016. [Google Scholar] [CrossRef]
- Rodriguez, J.; Cortes, P. Predictive Control of Power Converters and Electrical Drives; John Wiley & Sons: Hoboken, NJ, USA, 2012; Volume 40. [Google Scholar]
- Bououden, S.; Hazil, O.; Filali, S.; Chadli, M. Modelling and model predictive control of a DC-DC Boost converter. In Proceedings of the IEEE 2014 15th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), Hammamet, Tunisia, 21–23 December 2014; pp. 643–648. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Year | Controller | Converter | Features | Drawbacks |
|---|---|---|---|---|---|
| Ref. [8] Ref. [9] Ref. [10] | 2017 2014 2020 | PI PD PID | Boost converter - Buck-boost converter | - Less energy consumption. - Simplicity of implementation - Frequently used in the industry. - Low computational requirements. | - Sensitive against large load variation. - Inappropriate control parameters leads to the system instability. - Not proper for non-linear systems. - Parameters setting is difficult. |
| Ref. [11] | 2020 | FOPID | FSBB | - High robustness in comparison with PID. - Less energy consumption. | - Complex implementation. - Abundant parameters are required to be adjusted. |
| Ref. [12] | 2021 | SSA-PID | Boost converter | - Reasonable execution time. - Good convergence acceleration. - Few parameters tuning. | - Suffers from premature convergence. - Unsuccessful to achieve the near-global solution. |
| Ref. [13] | 2017 | FLC | Boost converter | - Uses simple mathematics. - Simplicity of rules modifications. - Simplicity of implementation. | - Stability is not guaranteed. - The accuracy is not guaranteed since the outputs are perceived as a guess. - Necessity of human expertise. |
| Ref. [14] | 2019 | FLC-PSO | Boost converter | - Easy to implement. - Few parameters to adjust. | - High implementation cost. - complex calculation. - Needs memory to update velocity. |
| Ref. [15] | 2019 | ANFIS | Boost converter | - Capability of adaptation. - Expert knowledge is not required. - High convergence speed and tracking accuracy in comparison with FLC. | - Requires large data for training and learning. - Abundant parameters are required to be adjusted. - High computational cost. |
| Ref. [16] Ref. [17] | 2018 2018 | NNA | Interleaved boost Boost converter | - Similar to human reasoning. - No exact model is required - Possibility application for feed forward control. | - Needs an expert for a good initialization. - Stability is not guaranteed. - Abundant parameters are required to be adjusted. |
| Ref. [18] | 2018 | GA | Boost converter | - Easy to understand. - Effective for noisy environments. - Works well for mixed discrete/continuous problem. - Supports multi-objective optimization. | - Sometimes inappropriate for real-time applications. - Needs an expert for the implementation. - The objective function is hard to design. - Computationally expensive. |
| Ref. [19] | 2019 | ACO PSO DE | Boost converter | - High convergence speed. - High tracking accuracy. - High efficiency. | - Complex calculation. - High implementation cost. - Optimization process is lengthy. |
| Ref. [3] Ref. [20] Ref. [21] | 2017 2019 2019 | SMC | Boost converter | - High robustness. - Simple structure. - Easy parameter tuning. - Wide operation range. | - Excessive chattering effect. - Considerable energy consumption. - Lack of robustness during the reaching phase. |
| Ref. [22] | 2021 | IFTSMC | Boost converter | - Robust to parameter uncertainties and disturbances. - Finite time convergence. - Capable of reducing the chattering. - High convergence speed. | - Requires the knowledge of the system boundary uncertainties. - Problem of intrinsic singularity. - Convergence problem may occur when the states are away from the equilibrium. |
| Ref. [23] | 2018 | BSMC | Boost converter | - Stability is guaranteed. - Popular technique for high-order systems. - Uncertainties could be handled. | - Complex design. - Requires an exact mathematical model. - Sensitive to parameter variation. - Requires the measures of all the states. |
| Ref. [24] Ref. [21] Ref. [25] Ref. [26] | 2020 2019 2020 2020 | TA STA PCL QC | Boost converter | - Capability of chattering reduction. - Robust to uncertainties and disturbances. - Finite time convergence. | - Complex design. - Complex stability demonstration. - Accuracy is not guaranteed. - Unable to use for first-order systems. |
| Ref. [27] Ref. [28,29] Ref. [30] Ref. [31] Ref. [32] | 2019 2019 2020 2020 2020 | MPC | Buck converter 3-phase inverter Two-level inverter Boost converter High-gain converter | - Offers multiple variables control. - Prediction on upcoming disturbance. -Upcoming control actions prediction. - Peak load shifting capability. - Enhanced energy saving. - Enhanced transient response: peak, rise and settling time reduction. | - Plant model is required. - Requires specific background knowledge of the method. |
| PEMFC Features | Electrical Features | ||
|---|---|---|---|
| Type | Heliocentris FC50 | Operating Voltage | 2.5–10 V |
| Cooling | fans | Operating Current | 0–10 A |
| Fuel | Rated power | 40 W | |
| Dimensions | 1210.313.5 cm | Maximum power | 50 W |
| Weight | 1150 g | Open-circuit voltage | 9 V |
| Hydrogen Flowmeter | Hydrogen 15 bar Kit | ||
| Precision | 0.8% of the the quantified value | Inlet pressure | 1–15 bar |
| Measuring range | 10–1000 sml/min | Outlet pressure | 0.6 ∓ 0.2 bar |
| Thermal | Hydrogen 200 bar kit | ||
| Operating temperature | 15–50 ºC | inlet pressure | 200 bar |
| Max. start temperature | 45 ºC | outlet pressure | 1–15 bar |
| Fuel characteristics | Hydrogen Detector | ||
| Recommended purity | 5.0 (99.999%) | Type of sensor | 4% |
| Hydrogen input pressure | 0.4–8 bar (5.8–11.6 psig) | Measuring principle | 3 electrode sensor |
| Hydrogen consumption | Max. 700 sml/min (at 0 ºC, 1013 bar) | Range | 0–4% |
| Parameter | Range | Accuracy | Resolution |
|---|---|---|---|
| CR Mode Regulation Inputcurrent≥FS10% Input Voltage≥FS10% | 0.1–10 | ∓ (1% + 0.3% FS) | 0.001 |
| 10–99 | ∓ (1% + 0.3% FS) | 0.01 | |
| 100–999 | ∓ (1% + 0.3% FS) | 0.1 | |
| 1 k–4 k | ∓ (1% + 0.8% FS) | 1 | |
| CV Mode Regulation | 0.1–18 V | ∓ (0.05% + 0.02% FS) | 1 mV |
| 0.1–120 V | ∓ (0.05% + 0.025% FS) | 10 mV | |
| CC Mode Regulation | 0–3 A | ∓ (0.1% + 0.1% FS) | 0.1 mA |
| 0–30 A | ∓ (0.2% + 0.15% FS) | 1 mA | |
| Current Measurement | 0–3 A | ∓ (0.1% + 0.1% FS) | 0.1 mA |
| 0–30 A | ∓ (0.2% + 0.15% FS) | 1 mA | |
| Voltage Measurement | 0–18 V | ∓ (0.02% + 0.02% FS) | 1 mV |
| 0–120 V | ∓ (0.05% + 0.025% FS) | 10 mV |
| IAE | RMSE | RRMSE (%) | |||
|---|---|---|---|---|---|
| MPC | PI | MPC | PI | MPC | PI |
| 2.0607 | 9.2310 | 0.2068 | 0.5085 | 5.1705 | 12.7115 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Derbeli, M.; Charaabi, A.; Barambones, O.; Napole, C. High-Performance Tracking for Proton Exchange Membrane Fuel Cell System PEMFC Using Model Predictive Control. Mathematics 2021, 9, 1158. https://doi.org/10.3390/math9111158
Derbeli M, Charaabi A, Barambones O, Napole C. High-Performance Tracking for Proton Exchange Membrane Fuel Cell System PEMFC Using Model Predictive Control. Mathematics. 2021; 9(11):1158. https://doi.org/10.3390/math9111158
Chicago/Turabian StyleDerbeli, Mohamed, Asma Charaabi, Oscar Barambones, and Cristian Napole. 2021. "High-Performance Tracking for Proton Exchange Membrane Fuel Cell System PEMFC Using Model Predictive Control" Mathematics 9, no. 11: 1158. https://doi.org/10.3390/math9111158
APA StyleDerbeli, M., Charaabi, A., Barambones, O., & Napole, C. (2021). High-Performance Tracking for Proton Exchange Membrane Fuel Cell System PEMFC Using Model Predictive Control. Mathematics, 9(11), 1158. https://doi.org/10.3390/math9111158