Hermite Interpolation Based Interval Shannon-Cosine Wavelet and Its Application in Sparse Representation of Curve


Abstract
1. Introduction
2. Shannon-Cosine Interpolation Wavelet
3. Construction of Interval Shannon-Cosine Interpolation Wavelet Based on Hermite Interpolation Extension
3.1. Extension Method Based on Hermite Interpolation
3.2. Multi-Scale Interpolation Wavelet
3.3. Construction of Interval Interpolation Wavelet
4. Results and Discussion
- (1)
- Continuity: The curve is continuous without breaks at the interpolation point.
- (2)
- Continuity: Two adjacent curves on both sides of the interpolation point have the same first-order derivative at the interpolation point.
- (3)
- Continuity: Two adjacent curves on both sides of the interpolation point have the same first-order derivative and second-order derivative at the interpolation point.
- (1)
- Continuity: The curve is continuous without breakpoints at interpolation points, which means that continuity is consistent with continuity.
- (2)
- Continuity: Two adjacent curves on both sides of the interpolation point have the same unit tangent at that point.
- (3)
- Continuity: Two adjacent curves on both sides of the interpolation point have a common unit tangent vector and a common curvature vector at the point.
4.1. Selection of Interval Wavelet
4.2. Adaptive Selection of Extension Intervals and Interpolation Points
4.3. Numerical Examples
5. Conclusions
- (1)
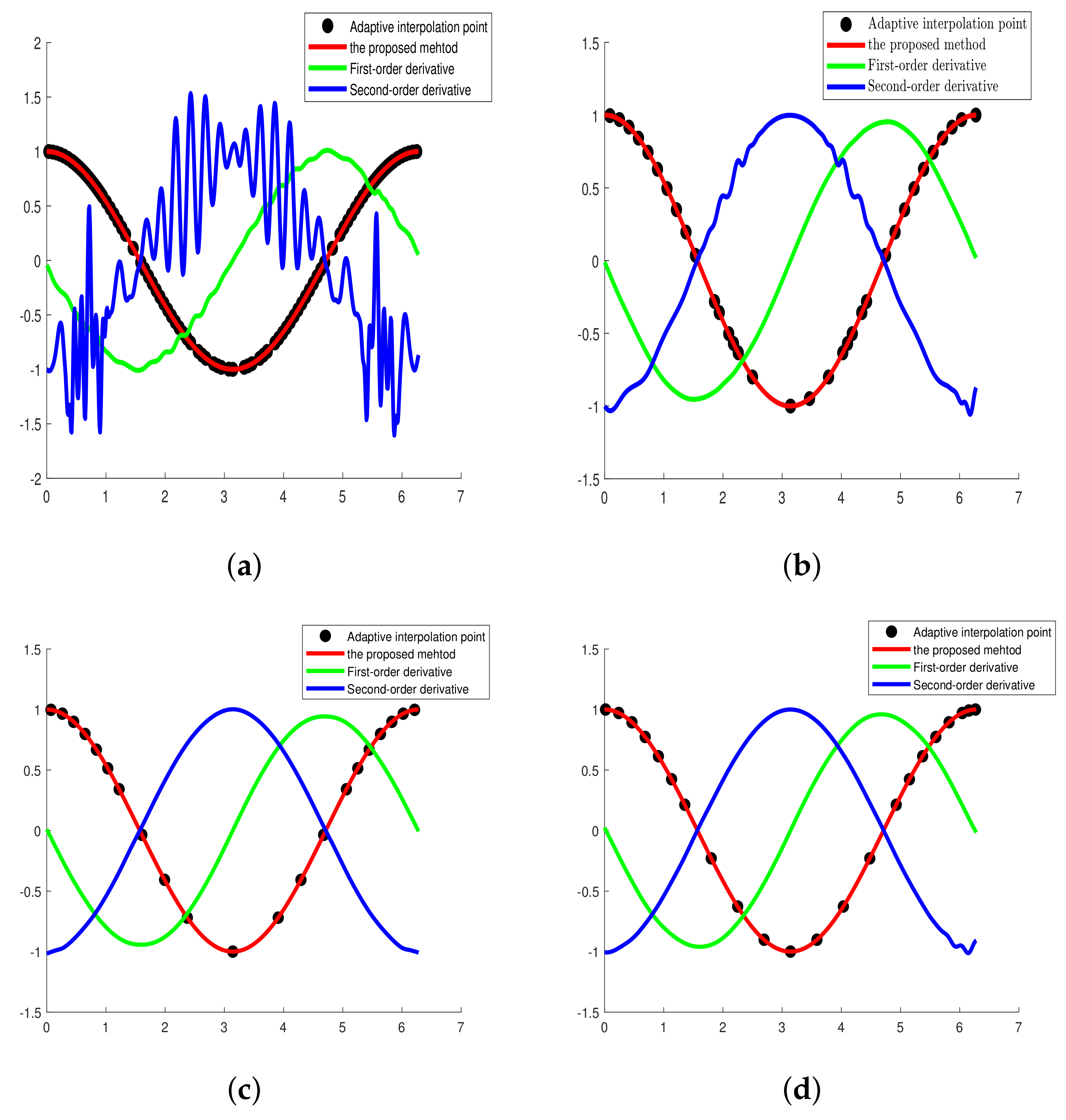
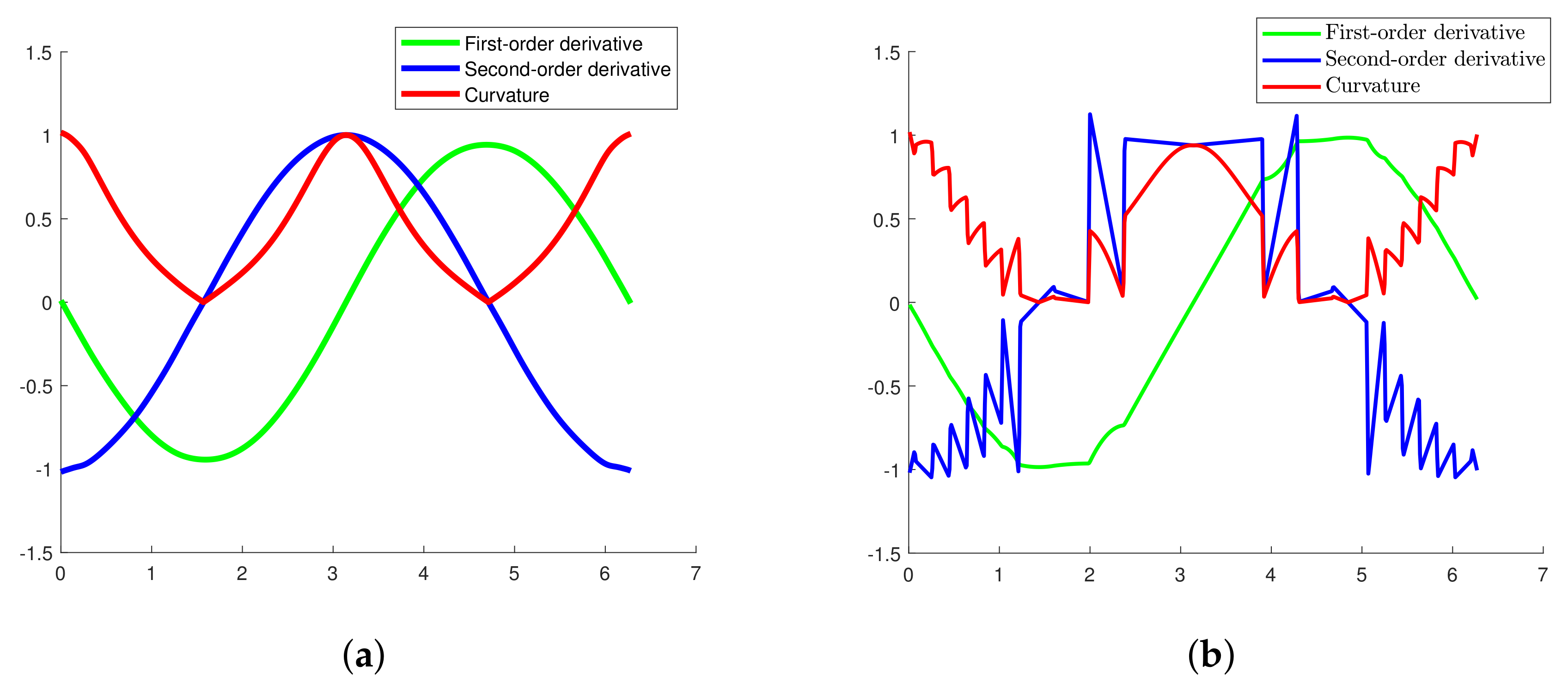
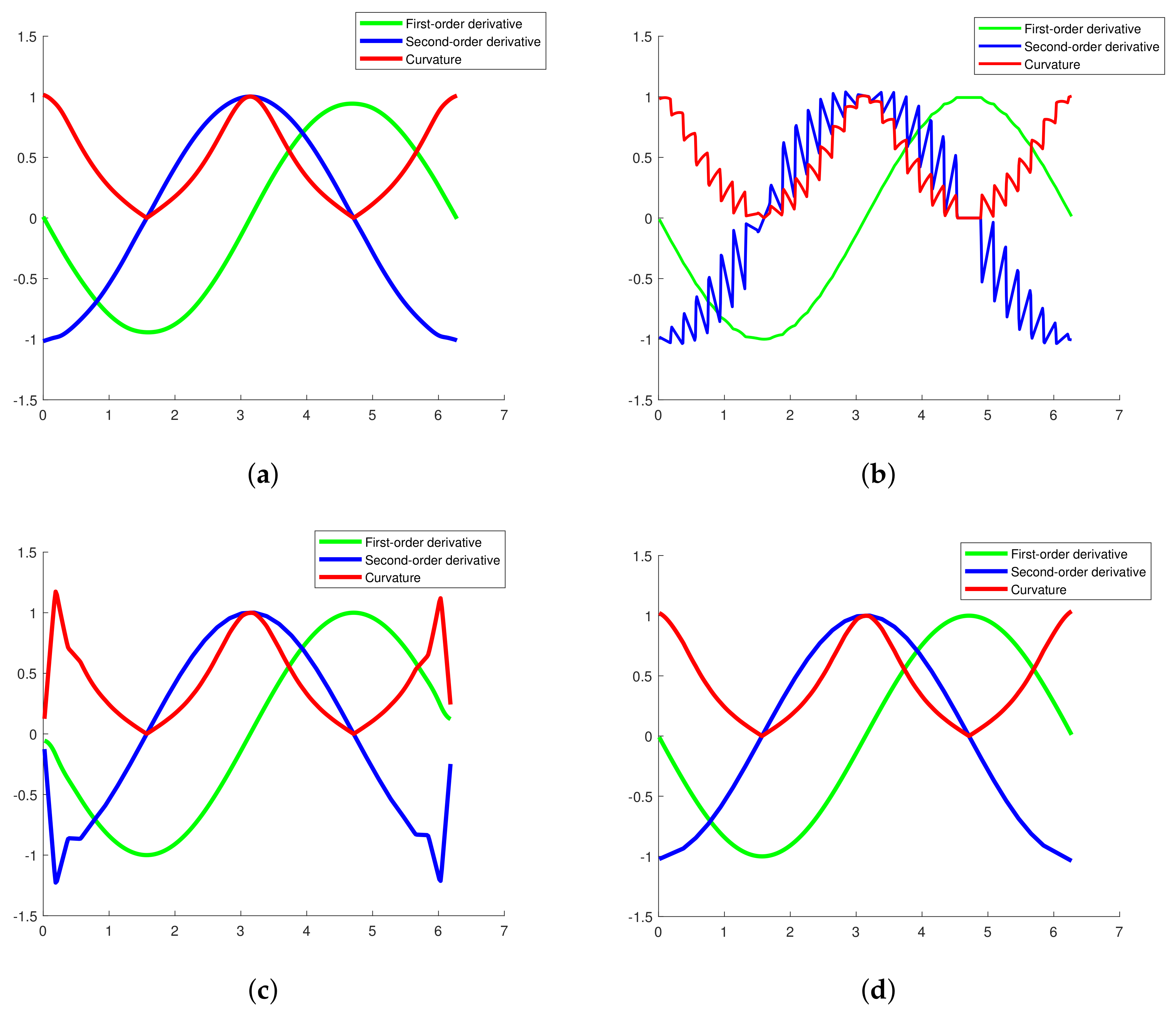
- Compared with Shannon-Cosine interpolation wavelet method, the interval wavelet constructed in this paper reduces the boundary effect and avoids the phenomenon of infinite oscillation.
- (2)
- The wavelet multi-scale interpolation operator constructed in this paper is sensitive to the change of the gradient. According to this character, sparse feature interpolation points can be obtained adaptively.
- (3)
- Numerical Experiments 1 and 2 show that the proposed method is suitable for the reconstruction of infinitely derivable smooth and irregular functions. When the number of interpolation points is the same, the proposed method has smaller maximum error, absolute mean error, mean square error and running time. When achieving close accuracy, the other methods need to add more interpolation points, which increases the running time. The proposed method can reconstruct smooth curve with as few points as possible, and improve the efficiency of reconstruction.
- (4)
- The infinitely derivable smooth function reconstructed by the proposed method is smoother and satisfies and continuity.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Deng, S.W.; Jia, Y.; Yao, X.M.; Liu, Z.N. A method of reconstructing complex stratigraphic surfaces with multitype fault constraints. Appl. Geophys. 2017, 14, 195–204. [Google Scholar] [CrossRef]
- Kong, D.; Tian, X.; Kong, D.; Zhang, X.; Yuan, L. An Improved Method for NURBS Free-form Surface Based on Discrete Stationary Wavelet Transform. IEEE Access 2020, 8, 67015–67023. [Google Scholar] [CrossRef]
- Fucile, P.; Papallo, I.; Improta, G.; De Santis, R.; Gloria, A.; Onofrio, I.; D’Antò, V.; Maietta, S.; Russo, T. Reverse Engineering and Additive Manufacturing towards the design of 3D advanced scaffolds for hard tissue regeneration. In Proceedings of the 2019 II Workshop on Metrology for Industry 4.0 and IoT (MetroInd4.0&IoT), Naples, Italy, 4–6 June 2019; pp. 33–37. [Google Scholar]
- Ghaffar, A.; Iqbal, M.; Bari, M.; Muhammad Hussain, S.; Manzoor, R.; Sooppy Nisar, K.; Baleanu, D. Construction and Application of Nine-Tic B-Spline Tensor Product SS. Mathematics 2019, 7, 675. [Google Scholar] [CrossRef]
- Aràndiga, F.; Donat, R.; Romani, L.; Rossini, M. On the reconstruction of discontinuous functions using multiquadric RBF–WENO local interpolation techniques. Math. Comput. Simul. 2020, 176, 4–24. [Google Scholar] [CrossRef]
- Bhuiyan, S.M.A.; Attoh-Okine, N.O.; Barner, K.E.; Ayenu-Prah, A.Y.; Adhami, R.R. Bidimensional Empirical Mode Decomposition Using Various Interpolation Techniques. Adv. Adapt. Data Anal. 2009, 1, 309–338. [Google Scholar] [CrossRef]
- Elhoseny, M.; Tharwat, A.; Hassanien, A.E. Bezier curve based path planning in a dynamic field using modified genetic algorithm. J. Comput. Sci. 2018, 25, 339–350. [Google Scholar] [CrossRef]
- Penner, A. ODF Using a 5-Point B-Spline. In Fitting Splines to a Parametric Function; Springer: Berlin/Heidelberg, Germany, 2019; pp. 37–42. [Google Scholar]
- Gavriil, K.; Schiftner, A.; Pottmann, H. Optimizing B-spline surfaces for developability and paneling architectural freeform surfaces. Comput. Aided Des. 2019, 111, 29–43. [Google Scholar] [CrossRef]
- Gao, X.; Zhang, S.; Qiu, L.; Liu, X.; Wang, Z.; Wang, Y. Double B-Spline Curve-Fitting and Synchronization-Integrated Feedrate Scheduling Method for Five-Axis Linear-Segment Toolpath. Appl. Sci. 2020, 10, 3158. [Google Scholar] [CrossRef]
- Otoguro, Y.; Takizawa, K.; Tezduyar, T.E. A general-purpose NURBS mesh generation method for complex geometries. In Frontiers in Computational Fluid-Structure Interaction and Flow Simulation; Springer: Berlin/Heidelberg, Germany, 2018; pp. 399–434. [Google Scholar]
- Zhao, Z.; Zhang, Y.; He, L.; Chang, X.; Zhang, L. A large-scale parallel hybrid grid generation technique for realistic complex geometry. Int. J. Numer. Methods Fluids 2020, 92, 1235–1255. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhao, Y.; Levesley, J. Adaptive radial basis function interpolation using an error indicator. Numer. Algorithms 2017, 76, 441–471. [Google Scholar] [CrossRef]
- Xu, S.Z.; Yu, H.L. The Interpolation-Iteration Method for Potential Field Continuation from Undulating Surface to Plane. Chin. J. Geophys. 2007, 50, 1566–1570. [Google Scholar] [CrossRef]
- Feng, G. Research of Multiresolution Representation for Curves and Surfaces Based on Subdivision. Master’s Thesis, Northwestern Polytechnical University, Xi’an, China, 2015. [Google Scholar]
- Harti, A. Discrete multi-resolution analysis and generalized wavelets. Appl. Numer. Math. 1993, 12, 153–192. [Google Scholar] [CrossRef]
- Ho, D.K.; Plodpradista, P. On the use of multiresolution analysis for subsurface object detection using deep ground penetrating radar. In Detection and Sensing of Mines, Explosive Objects, and Obscured Targets XXIV; International Society for Optics and Photonics: Bellingham, WA, USA, 2019; Volume 11012, p. 1101209. [Google Scholar]
- Matei, B.; Meignen, S. Nonlinear cell-average multiscale signal representations: Application to signal denoising. Signal Process. 2012, 92, 2738–2746. [Google Scholar] [CrossRef]
- Bayer, F.M.; Kozakevicius, A.J.; Cintra, R.J. An iterative wavelet threshold for signal denoising. Signal Process. 2019, 162, 10–20. [Google Scholar] [CrossRef]
- Mei, S.; Gao, W. Shannon–Cosine wavelet spectral method for solving fractional Fokker–Planck equations. Int. J. Wavel. Multiresolut. Inf. Process. 2018, 16, 1850021. [Google Scholar] [CrossRef]
- Mei, S.; Liu, X.; Mei, S. Cell-filtering Based Multi-scale Shannon-Cosine Wavelet Denoising Method for Locust Slice Images. Int. J. Wavel. Multiresolut. Inf. Process. 2019, 17, 1950035. [Google Scholar] [CrossRef]
- Xing, R.; Li, Y.; Wang, Q.; Wu, Y.; Mei, S.L. Point-Symmetric Extension-Based Interval Shannon-Cosine Spectral Method for Fractional PDEs. Discret. Dyn. Nat. Soc. 2020, 2020, 4565036. [Google Scholar] [CrossRef]
- Lee, W.S.; Kassim, A.A. Signal and image approximation using interval wavelet transform. IEEE Trans. Image Process. 2006, 16, 46–56. [Google Scholar] [CrossRef]
- Mei, S.L.; Zhu, D.H. Interval shannon wavelet collocation method for fractional fokker-planck equation. Adv. Math. Phys. 2013, 2013, 821820. [Google Scholar] [CrossRef]
- Hou, Z.; Wang, C.; Yang, A. Study on symmetric extension methods in Mallat algorithm of finite length signal. In Proceedings of the 5th International Conference on Visual Information Engineering, Xi’an, China, 29 July–1 August 2009. [Google Scholar]
- Huang, G.; Nammour, R.; Symes, W.W.; Dolliazal, M. Waveform inversion via source extension. In SEG Technical Program Expanded Abstracts 2019; Society of Exploration Geophysicists: Tulsa, OK, USA, 2019; pp. 4761–4766. [Google Scholar]
- Ma, S.; Pan, F. Symmetric Extension of Steering Vectors and Beamforming. Prog. Electromagn. Res. 2018, 76, 19–29. [Google Scholar] [CrossRef]
- Han, B.; Michelle, M. Construction of wavelets and framelets on a bounded interval. Anal. Appl. 2018, 16, 807–849. [Google Scholar] [CrossRef]
- Reidl, F.; Wahlström, M. Parameterized Algorithms for Zero Extension and Metric Labelling Problems. arXiv 2018, arXiv:1802.06026. [Google Scholar]
- Zhengkun, L.; Ze, Z. The improved algorithm of the EMD endpoint effect based on the mirror continuation. In Proceedings of the 2016 Eighth International Conference on Measuring Technology and Mechatronics Automation (ICMTMA), Macau, China, 11–12 March 2016; pp. 792–795. [Google Scholar]
- Williams, J.R.; Amaratunga, K. A Discrete Wavelet Transform without edge effects using wavelet extrapolation. J. Fourier Anal. Appl. 1997, 3, 435–449. [Google Scholar] [CrossRef]
- Xiang, J.; Chen, X.; He, Y.; He, Z. The construction of plane elastomechanics and Mindlin plate elements of B-spline wavelet on the interval. Finite Elem. Anal. Des. 2006, 42, 1269–1280. [Google Scholar] [CrossRef]
- Xiang, J.; Chen, X.; Li, B.; He, Z.; He, Y. The construction of two-dimensional plane elasticity element using B-spline wavelet on the interval. In Proceedings of the 6th International Progress on Wavelet Analysis and Active Media Technology; World Scientific Publishing: Singapore, 2005. [Google Scholar]
- Donovan, G.C.; Geronimo, J.S.; Hardin, D.P. Orthogonal polynomials and the construction of piecewise polynomial smooth wavelets. SIAM J. Math. Anal. 1999, 30, 1029–1056. [Google Scholar] [CrossRef]
- Kilgore, T.; Prestin, J. Polynomial Wavelets on the Interval. Constr. Approx. 1996, 12, 95–110. [Google Scholar] [CrossRef]
- Fröhlich, J.; Uhlmann, M. Orthonormal polynomial wavelets on the interval and applications to the analysis of turbulent fields. SIAM J. Appl. Math. 2003, 63, 1789–1830. [Google Scholar] [CrossRef]
- Xiang, J.; Matsumoto, T.; Wang, Y.; Jiang, Z. A Hybrid of Interval Wavelets and Wavelet Finite Element Model for Damage Detection in Structures. Comput. Model. Eng. Sci. 2011, 81, 269–294. [Google Scholar]
- Boshernitzan, M.D.; Carroll, C. An extension of Lagrange’s theorem to interval exchange transformations over quadratic fields. J. d’Anal. Math. 1997, 72, 21–44. [Google Scholar] [CrossRef]
- Phelan, C.E.; Marazzina, D.; Fusai, G.; Germano, G. Hilbert transform, spectral filters and option pricing. Ann. Oper. Res. 2019, 282, 273–298. [Google Scholar] [CrossRef]
- Zhang, Y.; Wei, Y.; Mei, S.; Zhu, M. Application of multi-scale interval interpolation wavelet in beef image of marbling segmentation. Trans. Chin. Soc. Agric. Eng. 2016, 32, 296–304. [Google Scholar]
- Wei, Y.; Zhang, Y.; Mei, S.; Wei, S. Image dehazing method based on dark channel prior and interval interpolation wavelet transform. Trans. Chin. Soc. Agric. Eng. 2017, 33, 281–287. [Google Scholar]
- Kumar, A.; Pooja, R.; Singh, G.K. Design and performance of closed form method for cosine modulated filter bank using different windows functions. Int. J. Speech Technol. 2014, 17, 427–441. [Google Scholar] [CrossRef]
- Comert, Z.; Boopathi, A.M.; Velappan, S.; Yang, Z.; Kocamaz, A.F. The influences of different window functions and lengths on image-based time-frequency features of fetal heart rate signals. In Proceedings of the 2018 26th Signal Processing and Communications Applications Conference (SIU), Izmir, Turkey, 2–5 May 2018. [Google Scholar]
- Cheng, B.; Jin, L.; Li, G. Infrared and visual image fusion using LNSST and an adaptive dual-channel PCNN with triple-linking strength. Neurocomputing 2018, 310, 135–147. [Google Scholar] [CrossRef]
- Agarwal, P.; Singh, S.P.; Pandey, V.K. Mathematical analysis of blackman window function in fractional Fourier transform domain. In Proceedings of the International Conference on Medical Imaging, Greater Noida, India, 7–8 November 2014. [Google Scholar]
- Dimofte, C.; Mihut, L.; Baltog, I. Gauss window for singular system analysis in granulometry. In ROMOPTO’94: Fourth Conference in Optics; International Society for Optics and Photonics: Bellingham, WA, USA, 1995. [Google Scholar]
- Pan, S.; Han, Y.; Wei, S.; Wei, Y.; Xia, L.; Xie, L.; Kong, X.; Yu, W. A model based on Gauss Distribution for predicting window behavior in building. Build. Environ. 2019, 149, 210–219. [Google Scholar] [CrossRef]
- Hoffman, D.; Wei, G.; Zhang, D.; Kouri, D. Shannon–Gabor wavelet distributed approximating functional. Chem. Phys. Lett. 1998, 287, 119–124. [Google Scholar] [CrossRef]
- Shuli, M. Study on Wavelet Stochastic Finite Element Method. Ph.D. Thesis, China Agriculture University, Beijing, China, 2002. [Google Scholar]
- Chakrabarti, D.; Sahutoglu, S. The restriction operator on Bergman spaces. J. Geom. Anal. 2020, 30, 2157–2188. [Google Scholar] [CrossRef]
- Liu, P.P.; Wei, H.Z.; Chen, C.R.; Li, S.J. Continuity of Solutions for Parametric Set Optimization Problems via Scalarization Methods. J. Oper. Res. Soc. China 2018, 1–19. [Google Scholar] [CrossRef]
- Hu, G.; Bo, C.; Qin, X. Continuity conditions for Q-Bézier curves of degree n. J. Inequal. Appl. 2017, 2017, 115. [Google Scholar] [CrossRef]
- Daubechies, I. Where Do Wavelets Come From? A Personal Point of View. Proc. IEEE 1996, 84, 510–513. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| m | ||||||||
|---|---|---|---|---|---|---|---|---|
| 000 | 1 | |||||||
| 100 | 1/2 | 1/2 | ||||||
| 200 | 3/8 | 1/2 | 1/8 | |||||
| 300 | 5/16 | 15/32 | 3/16 | 1/32 | ||||
| 400 | 35/128 | 7/16 | 7/32 | 1/16 | 1/128 | |||
| 500 | 63/256 | 105/256 | 15/64 | 45/512 | 5/256 | 1/512 | ||
| 600 | 231/1024 | 99/256 | 495/2048 | 55/512 | 33/1024 | 3/512 | 1/2048 | |
| 700 | 429/2048 | 3003/8192 | 1001/4096 | 1001/8192 | 91/2048 | 91/8192 | 7/4096 | 1/8192 |
| Errors Check Point | The Proposed Method | Akima Method Model | Bezier Method | Cubic Spline Method |
|---|---|---|---|---|
| maximum error | × 10 | × 10 | × 10 | × 10 |
| average absolute error | × 10 | × 10 | × 10 | × 10 |
| mean square error | × 10 | × 10 | × 10 | × 10 |
| running time/second | × 10 | × 10 | × 10 | × 10 |
| Errors Check Point | The Proposed Method | Akima Method Model | Bezier Method | Cubic Spline Method |
|---|---|---|---|---|
| maximum error | × 10 | × 10 | × 10 | × 10 |
| average absolute error | × 10 | × 10 | × 10 | × 10 |
| mean square error | × 10 | × 10 | × 10 | × 10 |
| running time/second | × 10 | × 10 | × 10 | × 10 |
| Errors Check Point | The Proposed Method | Akima Method Model | Bezier Method | Cubic Spline Method |
|---|---|---|---|---|
| maximum error | × 10 | × 10 | × 10 | × 10 |
| average absolute error | × 10 | × 10 | × 10 | × 10 |
| mean square error | × 10 | × 10 | × 10 | × 10 |
| running time/second | × 10 | × 10 | × 10 | × 10 |
| Errors Check Point | The Proposed Method | Akima Method Model | Bezier Method | Cubic Spline Method |
|---|---|---|---|---|
| maximum error | × 10 | × 10 | × 10 | × 10 |
| average absolute error | × 10 | × 10 | × 10 | × 10 |
| mean square error | × 10 | × 10 | × 10 | × 10 |
| running time/second | × 10 | × 10 | × 10 | × 10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, A.; Li, L.; Mei, S.; Meng, K. Hermite Interpolation Based Interval Shannon-Cosine Wavelet and Its Application in Sparse Representation of Curve. Mathematics 2021, 9, 1. https://doi.org/10.3390/math9010001
Wang A, Li L, Mei S, Meng K. Hermite Interpolation Based Interval Shannon-Cosine Wavelet and Its Application in Sparse Representation of Curve. Mathematics. 2021; 9(1):1. https://doi.org/10.3390/math9010001
Chicago/Turabian StyleWang, Aiping, Li Li, Shuli Mei, and Kexin Meng. 2021. "Hermite Interpolation Based Interval Shannon-Cosine Wavelet and Its Application in Sparse Representation of Curve" Mathematics 9, no. 1: 1. https://doi.org/10.3390/math9010001
APA StyleWang, A., Li, L., Mei, S., & Meng, K. (2021). Hermite Interpolation Based Interval Shannon-Cosine Wavelet and Its Application in Sparse Representation of Curve. Mathematics, 9(1), 1. https://doi.org/10.3390/math9010001