1. Introduction
In many practical problems, the standard algebraic operations “plus” and “product” are inadequate, e.g., in scheduling problems, synchronization problems, or in project management, and binary operations “maximum” and “plus” seem to be more appropriate. This observation leads to the definition and use of so-called max-plus algebra, which has been used by many authors, see e.g., [
1,
2,
3,
4].
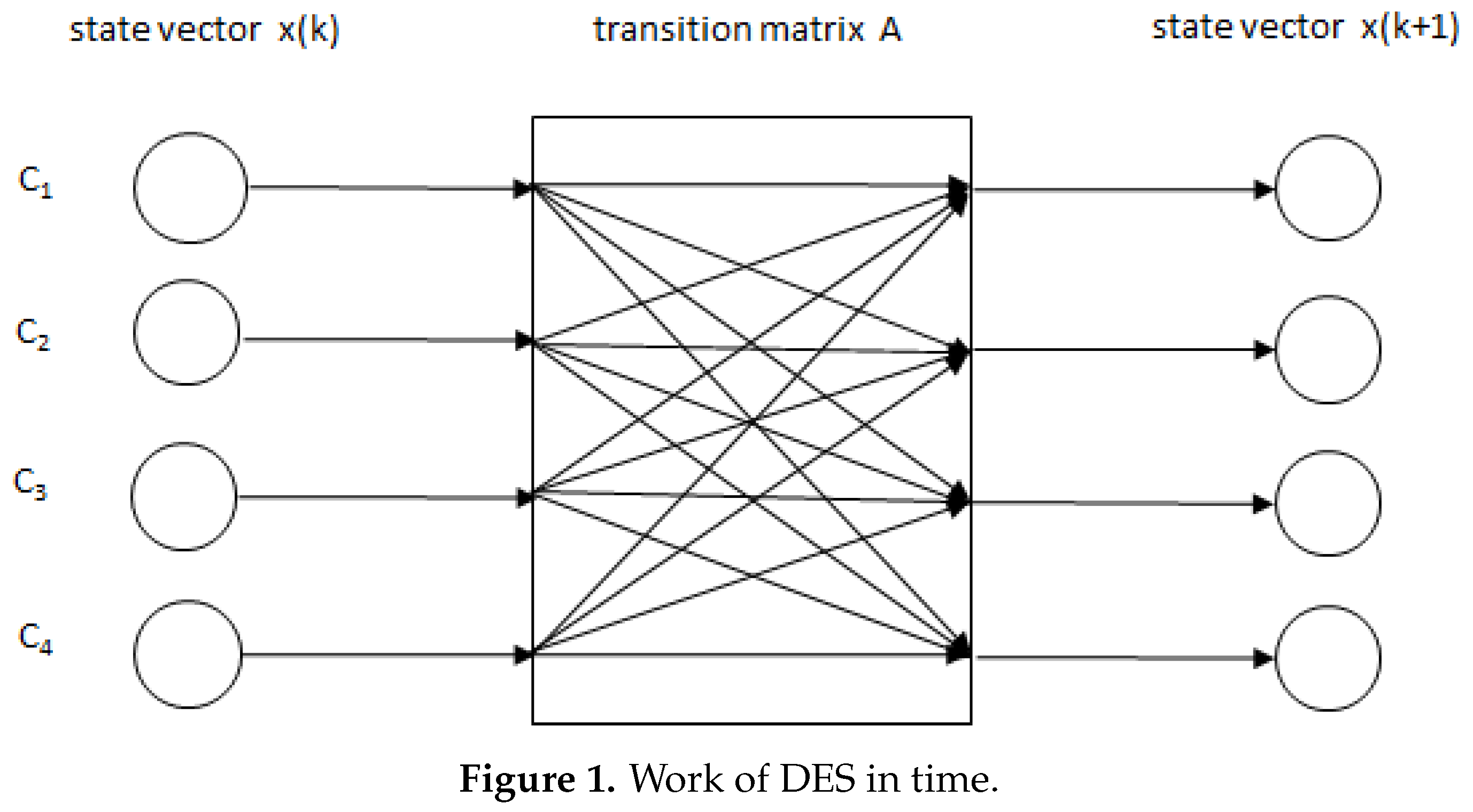
Max-plus algebras represent a suitable mathematical tool for exploration of systems working in discrete steps called discrete event systems (DES, for short). A DES is determined by the transition matrix,
A, and the starting state vector,
. The sequence of state vectors in time is then computed by recurrent formula
using the matrix operations derived from “maximum” and “plus” (for more details, see [
2,
5,
6]).
For convenience of the reader, we present here the basic definitions. A max-plus algebra is a triple , where is the set of real numbers with added , and , are binary operations on . Clearly, is the neutral element with respect to ⊕ and the absorbing element with respect to ⊗. () denote the set of all matrices (vectors) of the given dimension over . The linear ordering on induces a partial ordering on and , with respect to all entries of the matrix (vector).
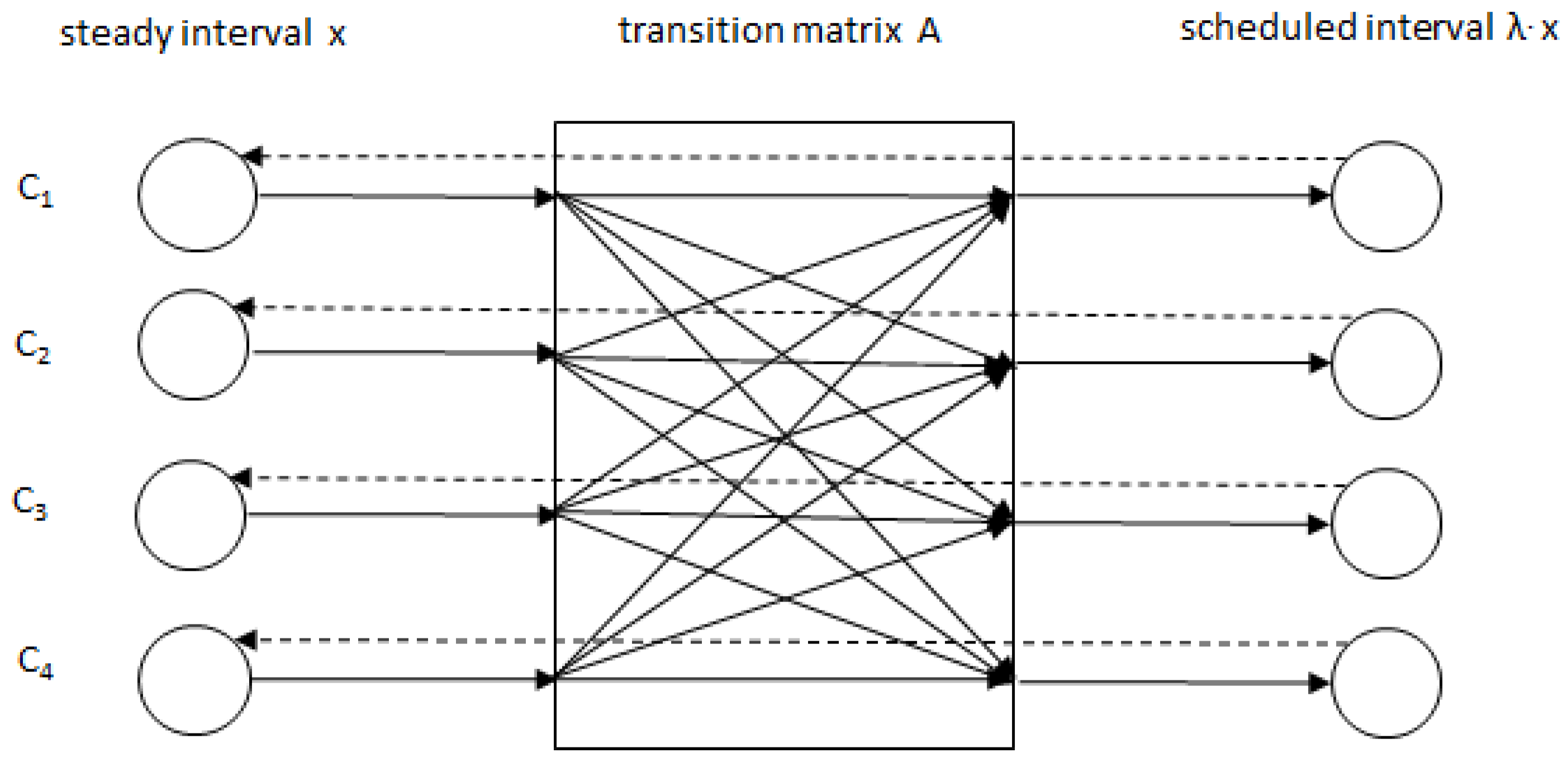
The work of a DES in time often comes to a steady state. In the formal matrix notation, the steady states correspond to max-plus eigenvectors fulfilling the equation , with , .
It is assumed that an eigenvector is different from the ‘zero’ vector with all entries equal to . In this notation, the intervals between the beginnings of consecutive cycles on every component of DES are equal to a scheduled value .
In the real world, the entries of matrices and vectors are usually not strict values and should be considered as intervals. The properties and recognition algorithms for several types of interval eigenvectors are studied in this paper. The strong, strongly universal and weak interval eigenvectors in max-plus algebra are investigated, and polynomial algorithms for the recognition versions of these problems are presented.
The results can be applied in every max-plus algebra and every instance of the interval eigenproblem.
2. Definitions and Basic Properties
Our results will be illustrated by the following simple example describing the main ideas of the investigation, see
Figure 1.
Example 1. An interactive system consisting of n entities (computers, or some other cooperating machines) working in stages can be represented by discrete-event systems. Denote the computers in parallel computation sharing partial data to continue the computation in the next stage. Suppose stands for the activation time of the k-th stage on . Furthermore, suppose that the entries of a matrix A (called the transition matrix) denote the computation time of computer while preparing the data for the work of computer in the -st stage . The interference of the system can be described by recurrence relationsThe considered system can be written in matrix/vector form as Moreover, if we schedule for λ the intervals between the beginnings of consecutive cycles on every computer, then we obtain . Finally, for steady scheduling of the system, we have to solve the equationSuppose that the transition matrix A has the formThen, for the system , we getthe solution which describes the activation times of , and the interval between the beginnings of consecutive cycles on every computer is equal to . For the work of a steady scheduled DES, see Figure 2. Remark 1. In Example 1, the entries are interpreted as activation times of cooperating machines in a DES, while λ is the length of the interval between the beginnings of consecutive cycles in the steady run of the system. This interpretation implies that x cannot contain ε entries. Moreover, by a suitable start of the time-measuring, we can achieve . The above interpretation gives as well.
Remark 2. On the other hand, the entries can occur in the transition matrix. The interpretation of such situation is: “ need not wait for ”. Hence, the case is trivial and is not allowed.
Remark 3. In LP computations, the constraints with a single ε value on the lower side of the inequality sign are automatically satisfied and may be left out of consideration.
Let us define, similarly as in [
7,
8,
9,
10], the interval matrix with bounds
and interval vector with bounds
,
and suppose that a fixed interval matrix
and interval vector
are given. The interval eigenproblem for
and
consists of recognizing whether
holds true for
, with suitable quantifiers (e.g., for all
, for some
, for all
, for some
) and their various combinations. According to the choice of quantifiers and their order, several different types of interval eigenvectors can be defined (see, e.g., [
11,
12,
13] for similar classification). The following three types are studied in detail in this paper.
Definition 1. Suppose there is a given interval matrix and an interval vector . Then, is called
a strong eigenvector of
if ;
a strongly universal eigenvector of
if ;
a weak eigenvector of
if .
Analogously as the above mentioned interval eigenvectors, the corresponding eigenvalues (the strong eigenvalue, the strongly universal eigenvalue, and the weak eigenvalue) of the interval matrix are also defined.
Remark 4. The investigated ‘universal’ type can be interpreted as follows. In general, the interval vector is a universal eigenvector of if there is an eigenvalue and a vector , which is a steady state of the discrete event system for every transition matrix (in other words, x is a universal eigenvector of , with eigenvalue λ).
It is welcome in scheduling, when there is one common universal eigenvector for all transition matrices (the interval vector is then called strongly universal). In such situations, it is possible to choose the activation vector within the given interval , while every possible transition matrix in the given interval is acceptable.
Otherwise, the universal eigenvector x depends on A. If the eigenvalue λ also depends on A, then the interval eigenvector is called weakly universal. The universal and weakly universal interval eigenvectors are not studied in this paper.
Remark 5. A strongly universal eigenvector is related to some eigenvalue , which is independent from A. It is also possible to define a weaker type of interval eigenvector (let us call it: semi-strongly universal) using the formula . In this formula, λ depends on A. However, as we prove below in this section, both notions (the strongly universal and the semi-strongly universal) are equivalent.
In the rest of this paper, we use notation and assume that an interval matrix and an interval vector are given.
The following notions of matrix and vector generators are useful. For each pair of indices
, we define
and
by putting for every
The next lemma says that every matrix in can be written as a max-plus linear combination of generating matrices (“generators,” for short) with . Similarly, every vector in is equal to a max-plus linear combination of generators with .
Lemma 1. [
11]
Let and . Then, - (i)
if and only if for some with ,
- (ii)
if and only if for some with .
Proposition 1. The interval vector is a semi-strongly universal eigenvector of the interval matrix if and only if there are and such that for every Proof. Assume
and
fulfill (
1). Take any
. Then, by Lemma 1(ii), there are
with
, for every
, such that
. We get
Write
. Then, (
3) and (
4) imply
. This means that
is semi-strongly universal, in view of the fact that
A was an arbitrary matrix in
. The converse implication is trivial. The equivalence of (
1) and (
2) follows by easy computation. □
Proposition 2. The interval vector is a semi-strongly universal eigenvector of the interval matrix if and only if is a strongly universal eigenvector of .
Proof. As a direct consequence of the definition, strong universality implies semi-strong universality with for all .
To show the converse implication, let us assume that
is a semi-strongly universal eigenvector of
. Then, in view of (2), there are
and
such that
For fixed
, (
5) is equivalent to
Claim 1.
Proof of Claim 1. Let
be fixed. Take
. Then, by (7), there is
such that
Claim 2.
Proof of Claim 2. Let
be fixed. In view of Claim 1 and inequality (
6), for every
, there is
such that
We have shown that
As
were arbitrary,
follows. By this, the proof of the proposition is complete. □
3. Strong Interval Eigenvectors in a Max-Plus Algebra
When the interval entries in the interval eigenproblem are narrow, then the scheduling is possible by any activation vector and any transition matrix in the given limits. A necessary and sufficient condition for recognizing this situation is described in this section.
Proposition 3. The interval vector is a strong eigenvector of the interval matrix if and only if there is such that for every Proof. Assume
and
with
fulfill (
8) and (9). Take any
, that is,
. Then,
by the monotonicity of the operations in a max-plus algebra. This implies
, in view of (
8) and (9).
By Lemma 1(i), every
can be written as
for some
with
. Then,
The converse implication is trivial. □
Remark 6. The eigenvalue λ of a strong interval eigenvector is uniquely determined by the entries of the vectors with These deciding values are computed from the entries of and . If the computed values are equal, then their common value λ is the unique eigenvalue of the problem, and the given interval vector is a strong eigenvector of . Otherwise, the interval eigenvector is not a strong one. Corollary 1. The problem of recognizing whether a given interval vector is a strong eigenvector of a given interval matrix in max-plus algebra is solvable by computing matrix products and by verifying max-plus linear equalities, hence, in -time.
Example 2. Assume now that the entries of and are intervals which contain values with the same importance and all values of the interval must be taken into account, i.e., there is an eigenvalue such that, for every vector and, for every transition matrix , the corresponding DES is in steady state. In other words, each is an eigenvector of each with the same eigenvalue λ.
Suppose that and are of the formThe goal is to recognize whether is a strong eigenvector of . By direct computation, we getandAfter subtracting generators , , , , we getfor every In view of (13) and (14), we have shown that is a strong eigenvector of with . 4. Strongly Universal Interval Eigenvectors in a Max-Plus Algebra
In a strongly universal case, there is one (so-called: universal) eigenvector which corresponds to all transition matrices in the given interval . Then, the scheduled run of the DES with the starting state x is satisfied in every stage, if the transition matrix is kept within the limits.
Proposition 4. Let , . The interval vector is a strongly universal eigenvector of the interval matrix if and only if there are and such that Proof. Assume
, and
fulfill (
15) and (16). Take any
, that is,
. Then,
, by the monotonicity of the operations in a max-plus algebra. This implies
, in view of (
15) and (16). The converse implication is trivial. □
LP approach. The existence of
, and
in Proposition 4 satisfying (
15) and (16) can be recognized by solving the following linear programming problem:
with variables
,
subject to
Theorem 1. The interval vector , , is a strongly universal eigenvector of the interval matrix , , if and only if the minimization problem (17)–(20) has an optimal solution satisfying Proof. It is easy to see that, for every pair
, the equality
implies that (
18) is automatically satisfied. That is, this constraint has only to be considered for
(see Remark 3). Analogous limitations are to be applied in (
21) and (22).
Now, let us assume that
and
are optimal solutions of (
17)–(20) with (
21) and (22). Then, (
15) and (16) follow by a simple transformation. In view of Proposition 4,
is strongly universal.
Conversely, assume that
is a strongly universal eigenvector of
. Then, by Proposition 4, there are
and
satisfying (
15) and (16). By easy equivalent modifications, we see that
and
x satisfy (
21) and (22).
Thus, for every
,
is the least upper bound of the set of all
with
(and also the least upper bound of the set of all
with
and
). That is,
is an optimal solution of the minimization problem (
17)–(20). □
Corollary 2. The problem of recognizing whether a given interval vector is a strongly universal eigenvector of a given interval matrix in a max-plus algebra is solvable with the help of an LP minimization problem with variables and constraints, and by verifying max-plus linear equations in -time.
Proof. The assertion follows from Remark 2 and Theorem 1. □
Example 3. Assume that the entries of and are intervals and we look for an eigenvalue and a vector such that, for every transition matrix, is the corresponding DES in a steady state.
Suppose that , are of the formsThe goal is to decide whether is a strongly universal eigenvector of . By solving the minimization problem (17)–(20), we get the optimal solution , satisfying (21), in Theorem 1. Now, after easy computation, we getThus, in view of Proposition 4, is a strongly universal eigenvector of , with scheduled starting state vector and . Remark 7. It is worth mentioning that, on the other hand, is not a strong eigenvector of because the condition (13) in Remark 6 is not satisfied. In particular, . This shows that a stronly universal interval eigenvector need not be a strong interval eigenvector. Example 4. In this example, we illustrate the influence of ε entries in the transition matrix on the computation. The interval vector is the same as in Example 3. Some of the entries of are substituted by , playing the the role of , and the rest remains unchanged.
Case A. Consider matrix withThe optimal solution of the minimization problem in this case is , . Similarly as in Example 3, an easy computation gives and Case B.The optimal solution of the minimization problem in this case is , . Case C.The optimal solution of the minimization problem in this case is , . 5. Weak Interval Eigenvectors in a Max-Plus Algebra
This section uses the general properties of the eigenvalue in interval eigenproblems that have been demonstrated in [
11]. Suppose that there is an interval matrix
and a vector
. Write
Lemma 2 ([
11]).
Let and . Then,if and only if Proposition 5. The interval vector is a weak eigenvector of the interval matrix if and only if there are and such that Proof. Assume
and
fulfill (
26) and (27). Then, (
25) follows from (
23) and (24). Thus,
is a weak eigenvector of
by Lemma 2.
Conversely, if
is a weak eigenvector of
, then there are
,
, and
such that
. As a consequence, (
25) holds, by Lemma 2. In view of (
23) and (24), we have (
26) and (27). □
Remark 8. If the conditions (26) and (27) are satisfied for given and , then the matrix with can be constructed by the following procedure, described in [11], Lemma 4.2. In view of the conditionthere is a such that, for every , Choose a mapping φ fulfilling (28) and then define a matrix by puttingIn view of (28) and (29), we have for every and hence . On the other hand, the conditionimplies that, for every ,hence . That is, . Furthermore, we have, for every ,By an easy modification of (30) and (31), we get . LP approach. The existence of
and
satisfying (
26) and (27) can be recognized by solving the following linear programming problem
with variables
,
,
subject to
Remark 9. Note that for every . That is, the objective function is bounded from below. As a consequence, if there is a feasible solution of , then has at least one optimal solution.
Theorem 2. The interval vector is a weak eigenvector of the interval matrix if and only if the minimization problem (32)–(37) has an optimal solution satisfying Proof. Assume that
is the optimal value of the objective function (
32) and
,
,
, with
satisfying (
33)–(
38). Then, inequalities (
33) imply (
26). Similarly, (35) implies
. The minimality of the sum in (
32) means that the value of every summand is minimal. That is,
for every
. This implies (27), in view of inequalities (34). Finally, (36) and (37) give
. We have shown that all the assumptions in Proposition 5 are satisfied. Hence,
is a weak eigenvector of
.
Conversely, assume that
is a weak eigenvector of
. Then, by Proposition 5, there are
and
satisfying (
26) and (27). For
, write
. Then, the constraints (
33)–(
38) are satisfied. That is,
,
and
form a feasible solution to (
32)–(37). By the note in Remark 9, there is an optimal solution to
,
. As every fixed
is the least upper bound of the set of all
with
, then
is minimal. That is,
. As a consequence,
,
,
are optimal. □
Corollary 3. The problem of recognizing whether a given interval vector is a weak eigenvector of a given interval matrix in a max-plus algebra is solvable with the help of an LP minimization problem with variables and constraints.
Proof. The assertion follows from Remark 9 and Theorem 2. □
Example 5. Suppose that and are givenThe goal is to decide whether is a weak eigenvector of . By solving the minimization problem (32)–(37), we get an optimal solution , , . The following computation shows that condition (38) in Theorem 2 is satisfied:As a consequence of Theorem 2, is a weak eigenvector of . The example will be completed by finding with . According to the construction described in Remark 8, we find a function such that, for every ,Such a mapping φ can be chosen in several possible ways, e.g., φ, withare good choices. For chosen φ, the matrix is defined by puttingIn this example, the formula (44) gives for both choices . 6. Conclusions
Three types of interval eigenvectors: the strong, the strongly universal, and the weak interval eigenvector of an interval matrix in max-plus algebra have been studied.
The structure of an eigenvector, and a polynomial algorithm for the corresponding recognition problem have been presented for each of the considered types. Surprisingly, another analogous type of a semi-strongly universal eigenvector turned out to be equivalent to the strongly universal type, in spite of the fact that the first notion is formally weaker than the second one.
The working procedures of the algorithms are illustrated by numerical examples. The examples also show which of the considered types are not equivalent.
The presented results correspond to the authors’ systematic effort to solve the recognition problem for various types of interval eigenvectors in max-plus and max-min algebra. Polynomial recognitions of the universal and weakly universal interval eigenvectors remain open for future research.
Author Contributions
Investigation, M.G., D.P. and J.P.; writing–original draft preparation, M.G., D.P. and J.P.; writing–review and editing, M.G., D.P. and J.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Grantová Agentura České Republiky, Grant No. 18-01246S and by the Faculty of Informatics and Management UHK, specific research project 2107 Computer Networks for Cloud, Distributed Computing, and Internet of Things III.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
References
- Baccelli, F.L.; Cohen, G.; Olsder, G.J.; Quadrat, J.P. Synchronization and Linearity: An Algebra for Discrete Event Systems; Wiley: Hoboken, NJ, USA, 1992. [Google Scholar]
- Butkovič, P. Max-Linear Systems: Theory and Algorithms; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Gavalec, M.; Ramík, J.; Zimmermann, K. Decision Making and Optimization—Special Matrices and Their Applications in Economics and Management; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Heidergott, B.; Olsder, G.J.; van der Woude, J. Max Plus at Work: Modeling and Analysis of Synchronized Systems: A Course on Max-Plus Algebra and Its Applications; Princeton Series in applied Mathematics; Princeton University Press: Princeton, NJ, USA, 2006. [Google Scholar]
- Akian, M.; Bapat, R.; Gaubert, S. Max-plus algebras. In Handbook of Linear Algebra; Hogben, L., Ed.; Chapman and Hall/CRC: New York, NY, USA, 2007; Chapter 25; pp. 1–14. [Google Scholar]
- Cuninghame-Green, R.A. Minimax Algebra. In Lecture Notes in Economics and Mathematical Systems; Springer: Berlin/Heidelberg, Germany, 1979; Volume 166. [Google Scholar]
- Fiedler, M.; Nedoma, J.; Ramík, J.; Rohn, J.; Zimmermann, K. Linear Optimization Problems with Inexact Data; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Gavalec, M.; Plavka, J.; Tomáškovxax, H. Interval eigenproblem in max-min algebra. Linear Algebra Its Appl. 2014, 440, 24–33. [Google Scholar] [CrossRef]
- Gavalec, M.; Zimmermann, K. Classification of solutions to systems of two-sided equations with interval coefficients. Int. J. Pure Appl. Math. 2008, 45, 533–542. [Google Scholar]
- Plavka, J. The weak robustness of interval matrices in max-plus algebra. Discret. Appl. Math. 2014, 173, 92–101. [Google Scholar] [CrossRef]
- Gavalec, M.; Plavka, J.; Ponce, D. Tolerance types of interval eigenvectors in max-plus algebra. Inf. Sci. 2016, 367, 14–27. [Google Scholar] [CrossRef]
- Myšková, H. Control solvability of interval systems of max-separable linear equations. Linear Algebra Its Appl. 2006, 416, 215–223. [Google Scholar] [CrossRef][Green Version]
- Rohn, J. Solvability of systems of linear interval equations. Siam J. Matrix Anal. Appl. 2003, 25, 237–245. [Google Scholar] [CrossRef]
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



{kind=link}
{kind=link}

