State Vector Identification of Hybrid Model of a Gas Turbine by Real-Time Kalman Filter

 ,
,  and
and
Abstract
1. Introduction
2. Gas Turbine Engine Models
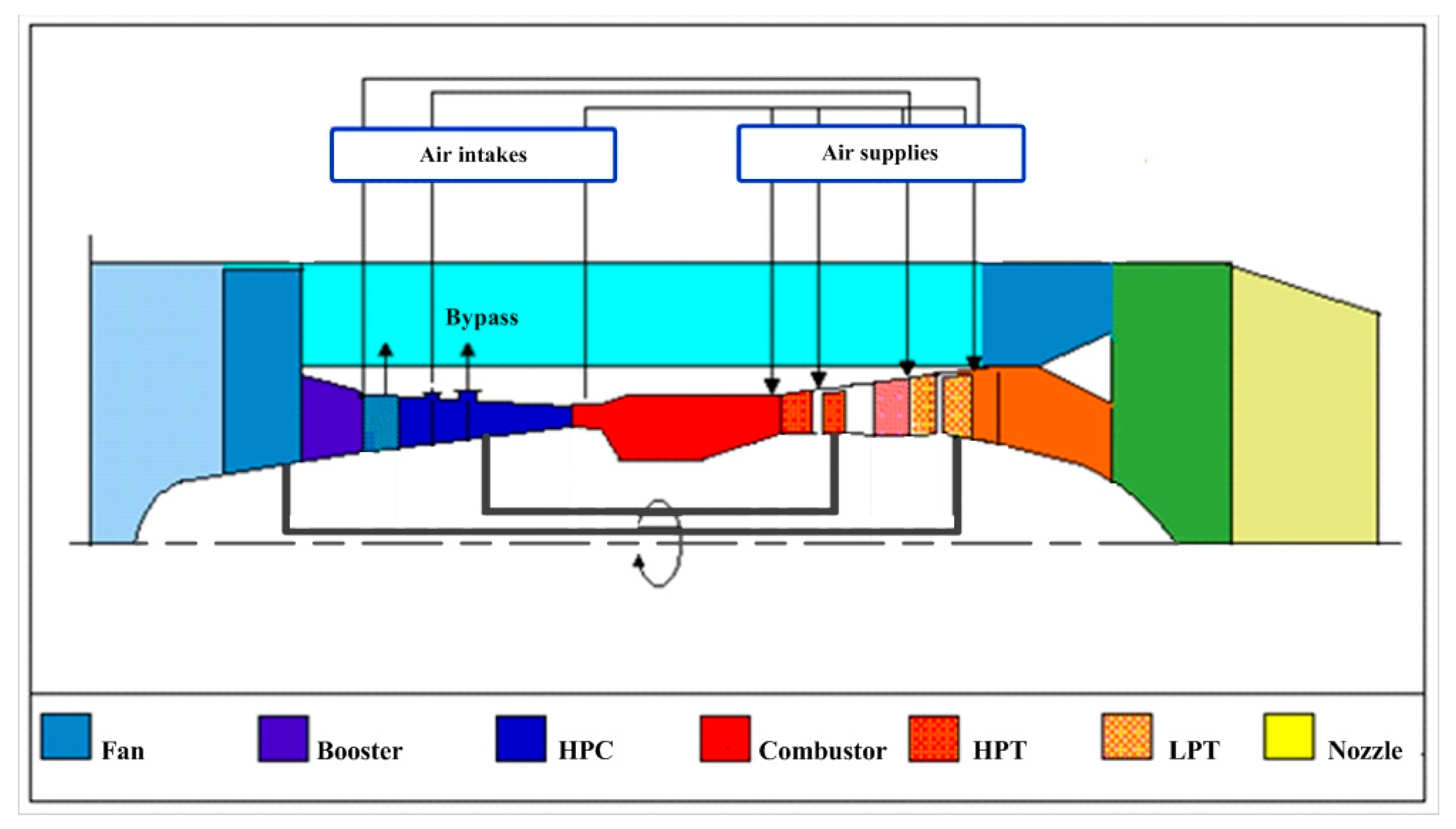
2.1. Analyzed Engine
2.2. Nonlinear Static Model
2.3. Nonlinear Dynamic Model
2.4. Static Baseline Model
2.5. Linear Dynamic Model
3. Hybrid Dynamic Model
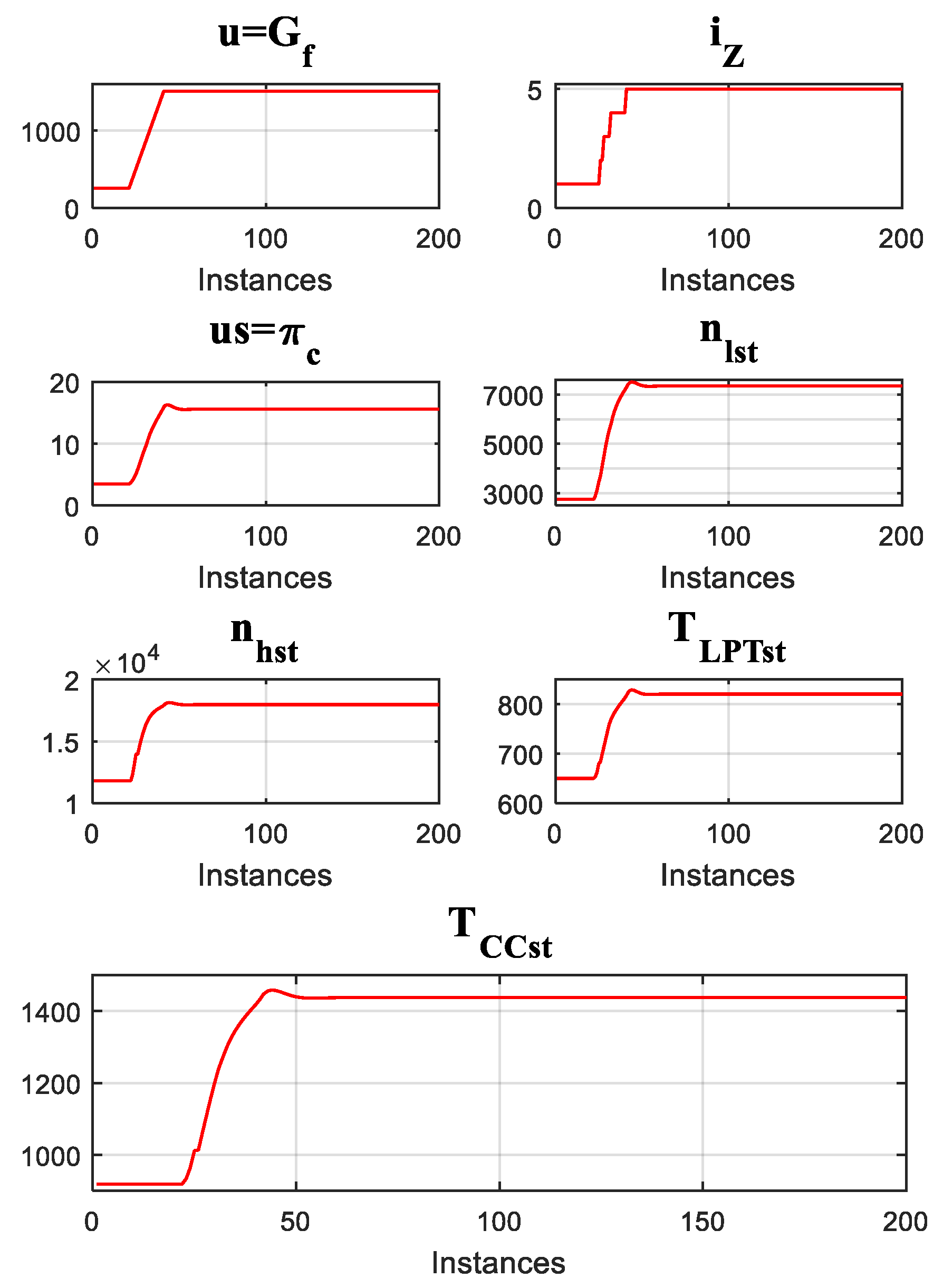
4. Real-Time Simulation of GTE
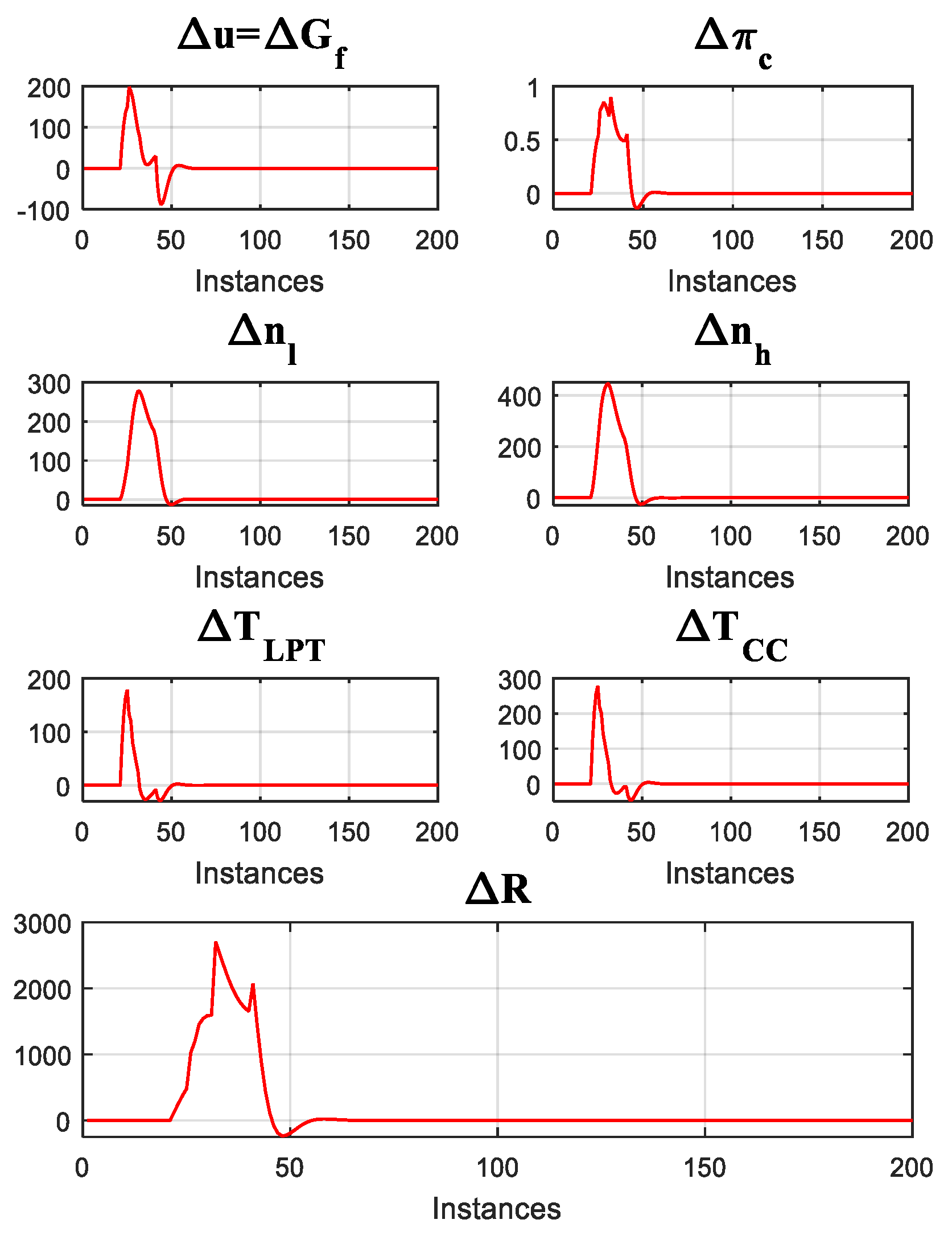
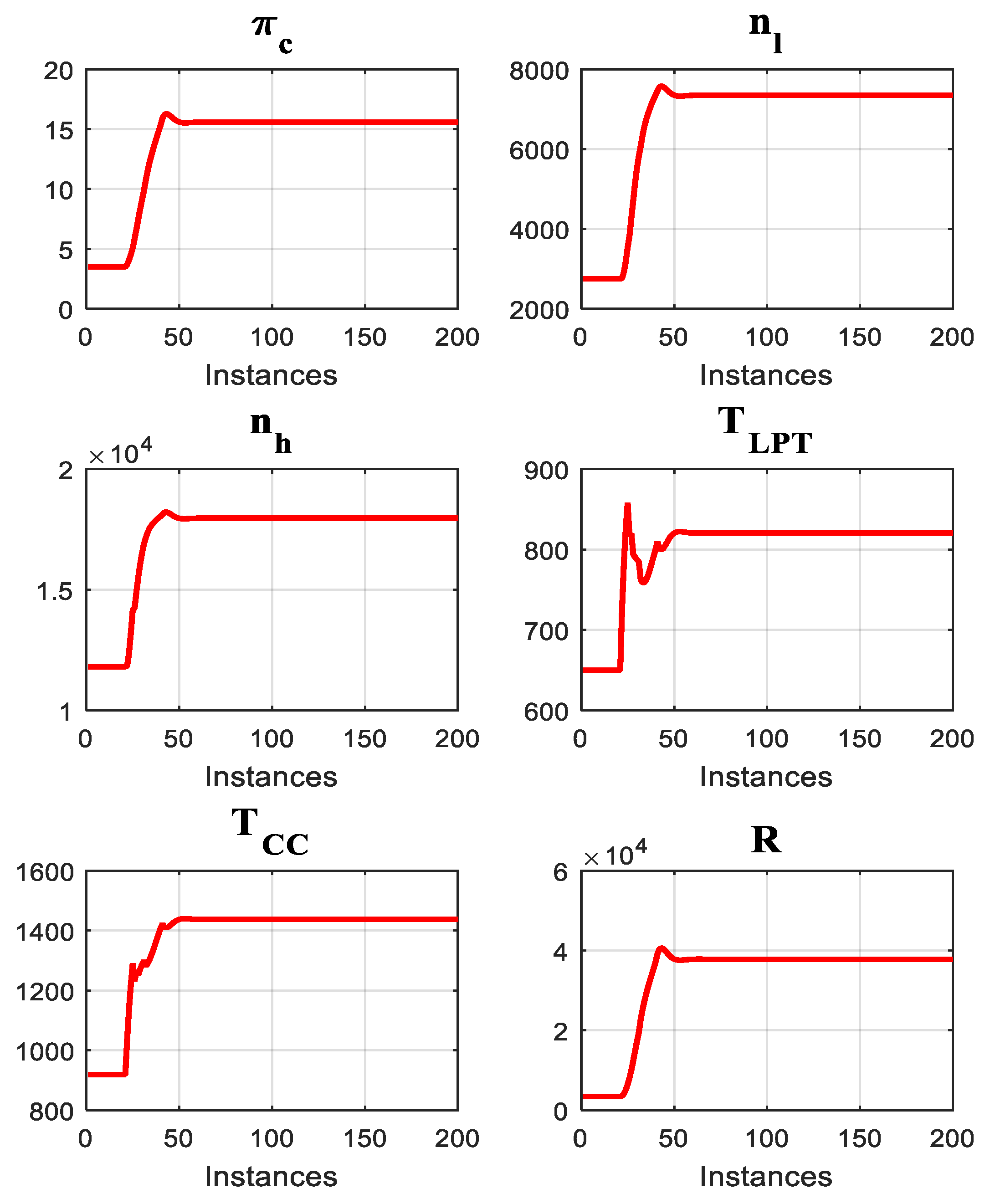
5. State Vector Identification by Kalman Filter
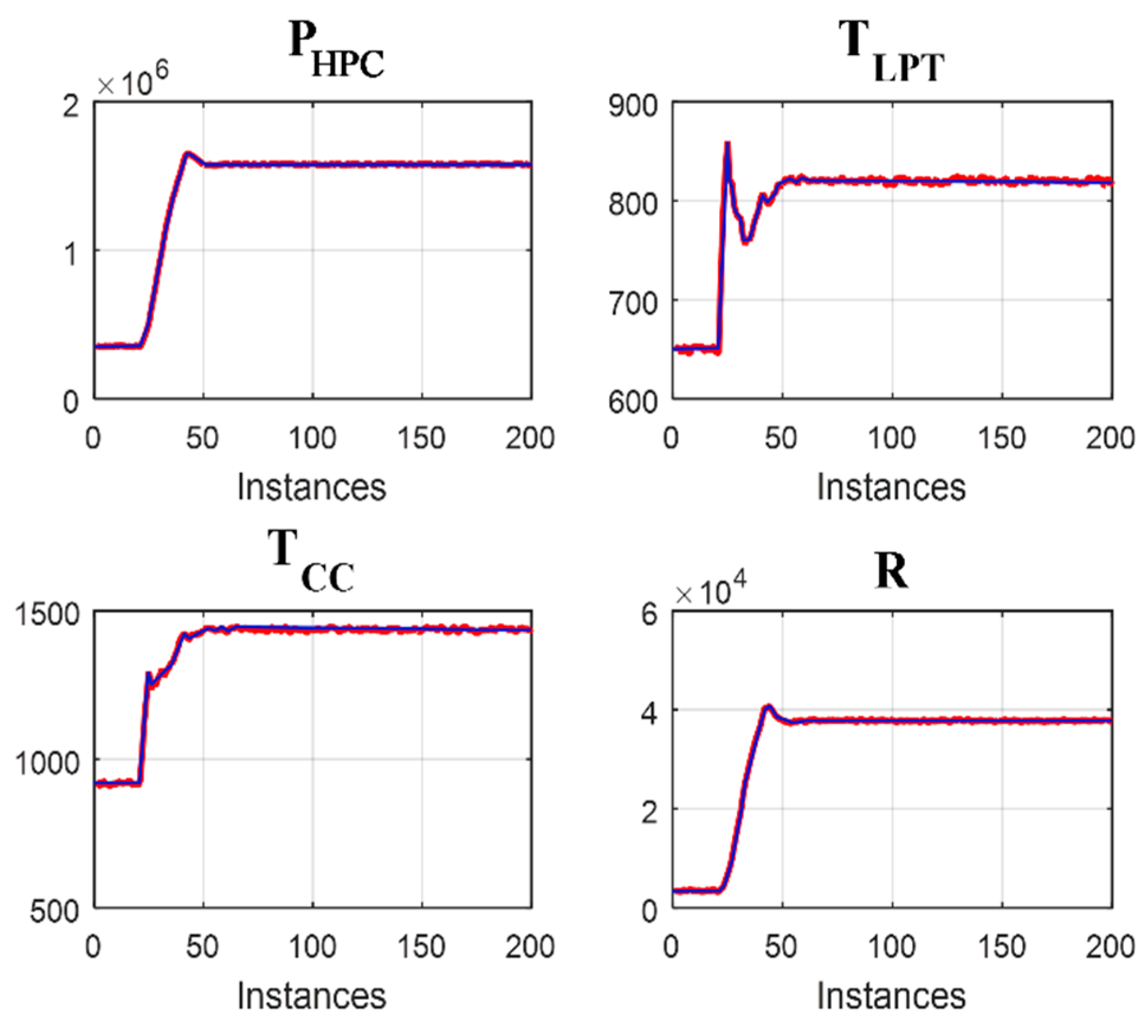
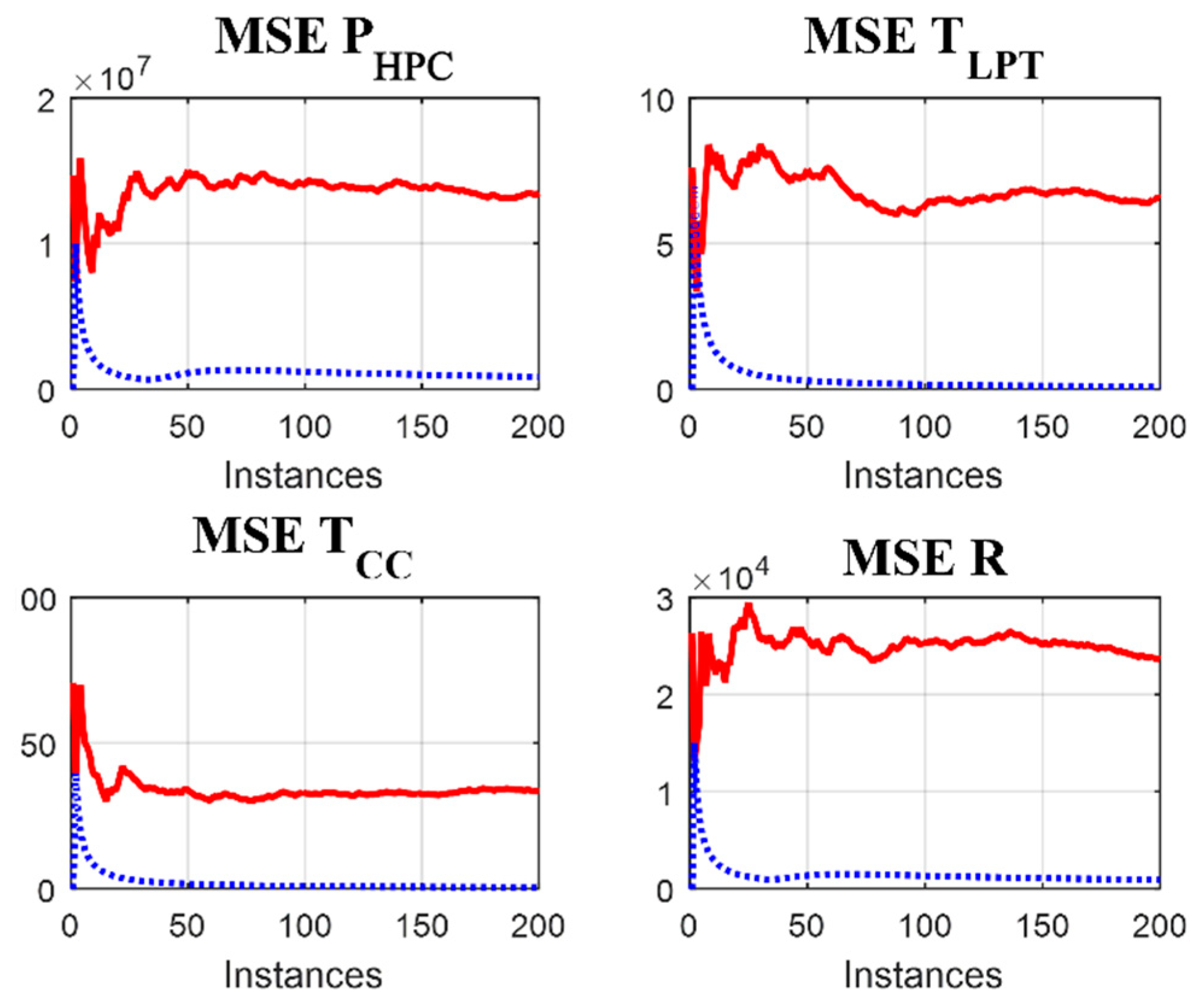
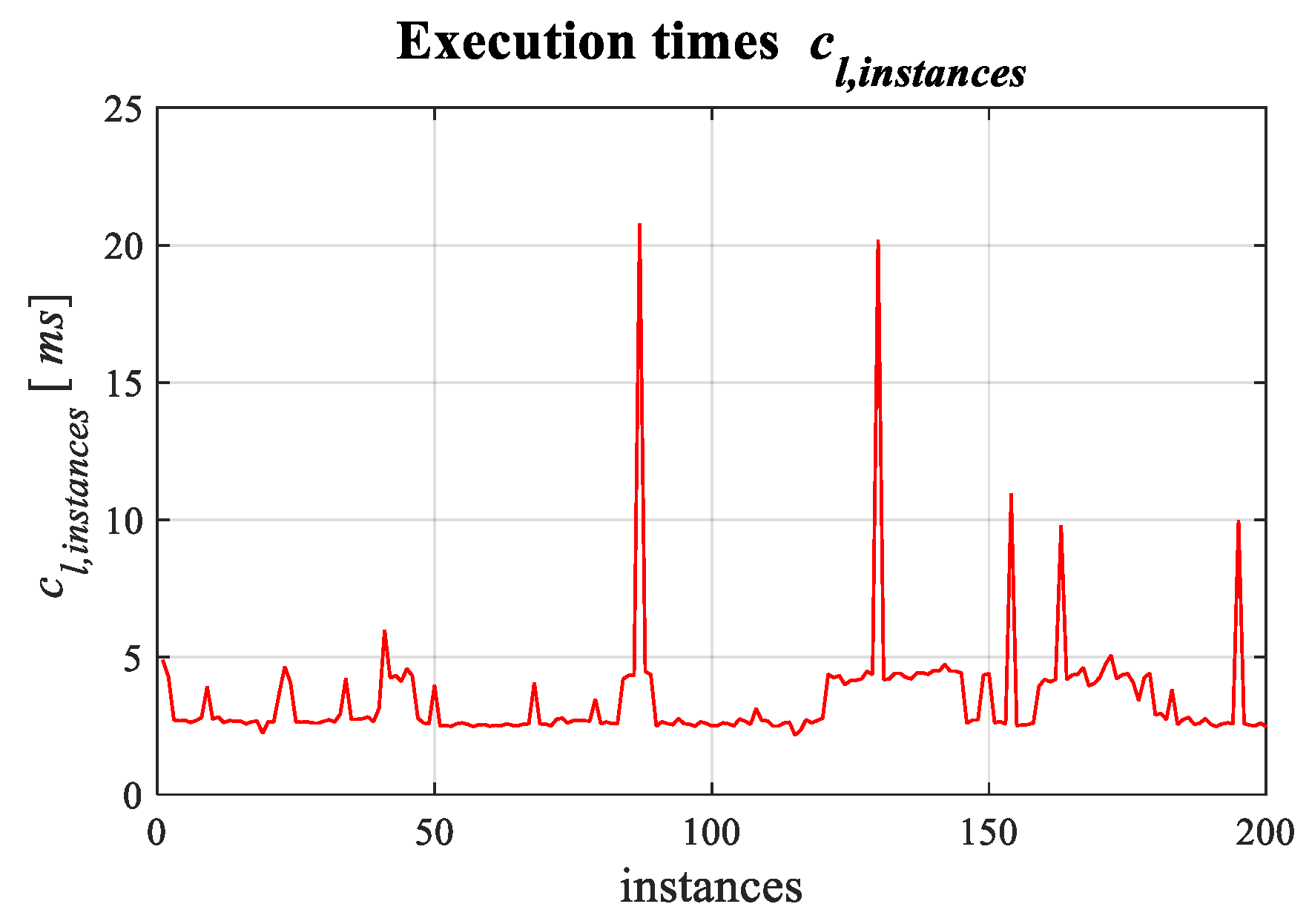
6. Real-Time Response Analysis
- Execution time is the time in which the instance with k index of a real-time task carries out its operations.
- Deadline is the maximum time in which a local response from the RTS must be obtained, without modification of the dynamic process.
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Abbreviations | |
| GTE | gas turbine engine |
| HPC | high-pressure compressor |
| HPT | high-pressure turbine |
| KF | Kalman Filter |
| LPT | low-pressure turbine |
| MSE | mean square error |
| RTS | real-time System |
| SBC | single board computer |
| Variables | |
| a | polynomial coefficient |
| A,B,C,D | state space model matrixes |
| C | execution time |
| D | deadline time |
| G | mass flow |
| G | state vector estimation; mass consumption |
| k | iteration number |
| K | Kalman filter gain matrix |
| m | number of monitored variables; bypass ratio |
| n | rotation speed, number of operating conditions |
| P | pressure |
| P | covariance matrix of state variables |
| Q | internal noise covariance matrix |
| R | external noise covariance matrix |
| r | number of fault parameters |
| R | engine thrust |
| SFC | specific fuel consumption |
| T | temperature |
| u | control variable |
| U | vector of operating conditions |
| X | vector of state variables |
| Y | vector of monitored variables |
| Δ | difference |
| π | pressure ratio |
| Θ | vector of fault parameters |
| Indexes | |
| air | air |
| c | compressor |
| cc | combustion chamber |
| f | fuel |
| h | high pressure rotor |
| l | low pressure rotor |
| s, st | static |
| z | zone |
References
- Haykin, S. Adaptive Filter Theory, 3rd ed.; Prentice Hall: Upper Saddle River, NY, USA, 1991; pp. 32–40. [Google Scholar]
- Medel, J. Análisis de dos métodos de estimación para sistemas lineales estacionarios e invariantes en el tiempo con perturbaciones correlacionadas con el estado observable del tipo: Una entrada una salida. Comput. Sist. 2002, 5, 215–222. [Google Scholar]
- Medel, J.; Guevara, P.; Cruz, D. Temas Selectos de Sistemas en Tiempo Real; Editorial Politécnico: Mexico City, México, 2007; pp. 156–187. [Google Scholar]
- Nyquist, H. Certain Topics in Telegraph Transmission Theory. Trans. Am. Inst. Electr. Eng. 1928, 47, 617–644. [Google Scholar] [CrossRef]
- Buttazzo, G.C. Hard Real-Time Computing Systems; Springer: Boston, MA, USA, 1997; pp. 23–43. [Google Scholar]
- Chui, C.K.; Chen, G. Kalman Filtering with Real-Time Applications; Springer Science and Business Media LLC: Berlin, Germany, 1987; Volume 17, pp. 20–29. [Google Scholar]
- Boyce, M.P. Gas Turbine Engineering Handbook, 4th ed.; Elsevier Inc.: Oxford, UK, 2012; p. 956. [Google Scholar]
- Kulikov, G.G.; Thompson, H.A. Dynamic Modelling of Gas Turbines: Identification, Simulation, Condition Monitoring, and Optimal Control; Springer: London, UK, 2004; p. 309. [Google Scholar]
- Volponi, A. Gas Turbine Engine Health Management: Past, Present, and Future Trends. J. Eng. Gas Turbines Power 2014, 136, 051201. [Google Scholar] [CrossRef]
- Yunusov, S.; Labendik, V.; Guseynov, S. Monitoring and Diagnostics of Aircraft Gas Turbine Engines; LAMBERT Academic Publishing GmbH&Co: Saarbrücken, Germany, 2014; p. 196. [Google Scholar]
- Saravanamuttoo, H.I.H.; MacIsaac, B.D. Thermodynamic Models for Pipeline Gas Turbine Diagnostics. J. Eng. Power 1983, 105, 875–884. [Google Scholar] [CrossRef]
- Ekinci, S.; Gursoy, G.; Yavrucuk, I.; Uzol, O. An approach to sensor failure recovery using a neural network based adaptive observer. In Proceedings of the IGTI/ASME Turbo Expo 2016, Seoul, Korea, 13–17 June 2016; ASME Paper GT2016-57811. pp. 1–10. [Google Scholar]
- Loboda, I.; Feldshteyn, Y.; Yepifanov, S. Gas Turbine Diagnostics Under Variable Operating Conditions. Int. J. Turbo Jet-Engines 2007, 24, 231–244. [Google Scholar] [CrossRef]
- Pinelli, M.; Spina, P. Gas Turbine Field Performance Determination: Sources of Uncertainties. J. Eng. Gas Turbines Power 2000, 124, 155–160. [Google Scholar] [CrossRef]
- Sampath, S.; Singh, R. An Integrated Fault Diagnostics Model Using Genetic Algorithm and Neural Networks. J. Eng. Gas Turbines Power 2004, 128, 49–56. [Google Scholar] [CrossRef]
- Ogaji, S.O.T.; Li, Y.G.; Sampath, S.; Singh, R. Gas Path Fault Diagnosis of a Turbofan Engine from Transient Data Using Artificial Neural Networks. In Proceedings of the Turbo Expo 2003, Atlanta, GA, USA, 16–19 June 2003; Volume 4, pp. 405–414. [Google Scholar]
- Carvalho, A.; Machado, C.; Moraes, F. Raspberry Pi Performance Analysis in Real-Time Applications with the RT-Preempt Patch. In Proceedings of the 2019 Latin American Robotics Symposium, Rio Grande, Brazil, 23–25 October 2019; pp. 162–167. [Google Scholar]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Reddy, M.P.P.; Jacob, J. Vibration Control of Flexible Link Manipulator Using SDRE Controller and Kalman Filtering. Stud. Inform. Control. 2017, 26, 143–150. [Google Scholar] [CrossRef][Green Version]
- Dchich, K.; Zaafouri, A.; Chaari, A. Combined Riccati-Genetic Algorithms Proposed for Non-Convex Optimization Problem Resolution—A Robust Control Model for PMSM. Stud. Inform. Control 2015, 24, 317–328. [Google Scholar] [CrossRef]
- Kamboukos, P.; Mathioudakis, K. Comparison of Linear and Non-Linear Gas Turbine Performance Diagnostics. J. Eng. Gas Turbines Power. 2003, 127, 451–459. [Google Scholar] [CrossRef]
- Panov, V. Auto-tuning of real-time dynamic gas turbine models. In Proceedings of the IGTI/ASME Turbo Expo 2014, Düsseldorf, Germany, 16–20 June 2014; pp. 1–10, ASME Paper GT2014–25606. [Google Scholar]
- Dewallef, P.; Borguet, S. A Methodology to Improve the Robustness of Gas Turbine Engine Performance Monitoring Against Sensor Faults. J. Eng. Gas Turbines Power 2013, 135, 051601. [Google Scholar] [CrossRef]
- Loboda, I.; Feldshteyn, Y. Polynomials and Neural Networks for Gas Turbine Monitoring: A Comparative Study. Int. J. Turbo Jet-Engines 2011, 28, 227–236. [Google Scholar] [CrossRef]
- Simon, D.L.; Armstrong, J.B.; Garg, S. Application of an Optimal Tuner Selection Approach for On-Board Self-Tuning Engine Models. J. Eng. Gas Turbines Power 2012, 134, 041601. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Meaning |
|---|---|
| State Variables | |
| R [N] | Engine thrust |
| πc = PHPC/Pin | Total compressor pressure ratio |
| Pin [N/m2] | Compressor inlet pressure |
| PHPC [N/m2] | HPC outlet pressure |
| Control Variables U | |
| us = | Compressor pressure ratio |
| U = Gf [Kg/h] | Dynamic control variable-fuel flow |
| State space Variables X | |
| nl [rpm] | Low pressure rotor speed |
| nh [rpm] | High pressure rotor speed |
| Monitored VariablesY | |
| PHPC = [N/m2] | HPC outlet pressure |
| TCC [K] | Combustor outlet temperature. |
| TLPT [K] | Low pressure turbine outlet temperature |
| Compared Systems | R | πc | Gf | PHPC | nl | nh | TCC | TLPT |
|---|---|---|---|---|---|---|---|---|
| Thermodynamic model | 37,790.0 | 15.587 | 1506.5 | 1,579,400.0 | 7348.1 | 17,943.0 | 1436.2 | 819.57 |
| Manufacturer’ model | 37,766.5 | 15.587 | 1505.2 | 1,579,300.0 | 7344.9 | 17,950.0 | 1435.3 | 820.87 |
| Compared Systems | R | πc | SFC | Gair | m | TCC |
|---|---|---|---|---|---|---|
| Thermodynamic model | 36,000.0 | 15.490 | 0.4160 | 132.07 | 4.857 | 1429.8 |
| Engine | 36,840.0 | 15.490 | 0.4100 | 125.85 | 4.940 | 1450.0 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Delgado-Reyes, G.; Guevara-Lopez, P.; Loboda, I.; Hernandez-Gonzalez, L.; Ramirez-Hernandez, J.; Valdez-Martinez, J.-S.; Lopez-Chau, A. State Vector Identification of Hybrid Model of a Gas Turbine by Real-Time Kalman Filter. Mathematics 2020, 8, 659. https://doi.org/10.3390/math8050659
Delgado-Reyes G, Guevara-Lopez P, Loboda I, Hernandez-Gonzalez L, Ramirez-Hernandez J, Valdez-Martinez J-S, Lopez-Chau A. State Vector Identification of Hybrid Model of a Gas Turbine by Real-Time Kalman Filter. Mathematics. 2020; 8(5):659. https://doi.org/10.3390/math8050659
Chicago/Turabian StyleDelgado-Reyes, Gustavo, Pedro Guevara-Lopez, Igor Loboda, Leobardo Hernandez-Gonzalez, Jazmin Ramirez-Hernandez, Jorge-Salvador Valdez-Martinez, and Asdrubal Lopez-Chau. 2020. "State Vector Identification of Hybrid Model of a Gas Turbine by Real-Time Kalman Filter" Mathematics 8, no. 5: 659. https://doi.org/10.3390/math8050659
APA StyleDelgado-Reyes, G., Guevara-Lopez, P., Loboda, I., Hernandez-Gonzalez, L., Ramirez-Hernandez, J., Valdez-Martinez, J.-S., & Lopez-Chau, A. (2020). State Vector Identification of Hybrid Model of a Gas Turbine by Real-Time Kalman Filter. Mathematics, 8(5), 659. https://doi.org/10.3390/math8050659