Computer Simulation and Iterative Algorithm for Approximate Solving of Initial Value Problem for Riemann-Liouville Fractional Delay Differential Equations



Abstract
1. Introduction
2. Preliminary and Auxiliary Results
3. Mild Lower and Mild Upper Solutions of FrDDE
4. Monotone-Iterative Techniques for FrDDE
- Let the functions be a lower solution and an upper solution, respectively, of the IVP for FrDDE (1) such that for and , for .
- The function and there exist constants and such that for any the inequality holds.
- a.
- The sequences and are defined by andthat is,where the constants are defined in condition 2.
- b.
- The sequence is increasing, that is, for .
- c.
- The sequence is decreasing, that is, for , .
- d.
- The inequalityholds.
- e.
- The sequences and converge uniformly on and , on .
- f.
- The limit functions and are mild solutions of the IVP for FrDDE (1) on .
- g.
- The inequalities hold on for any .
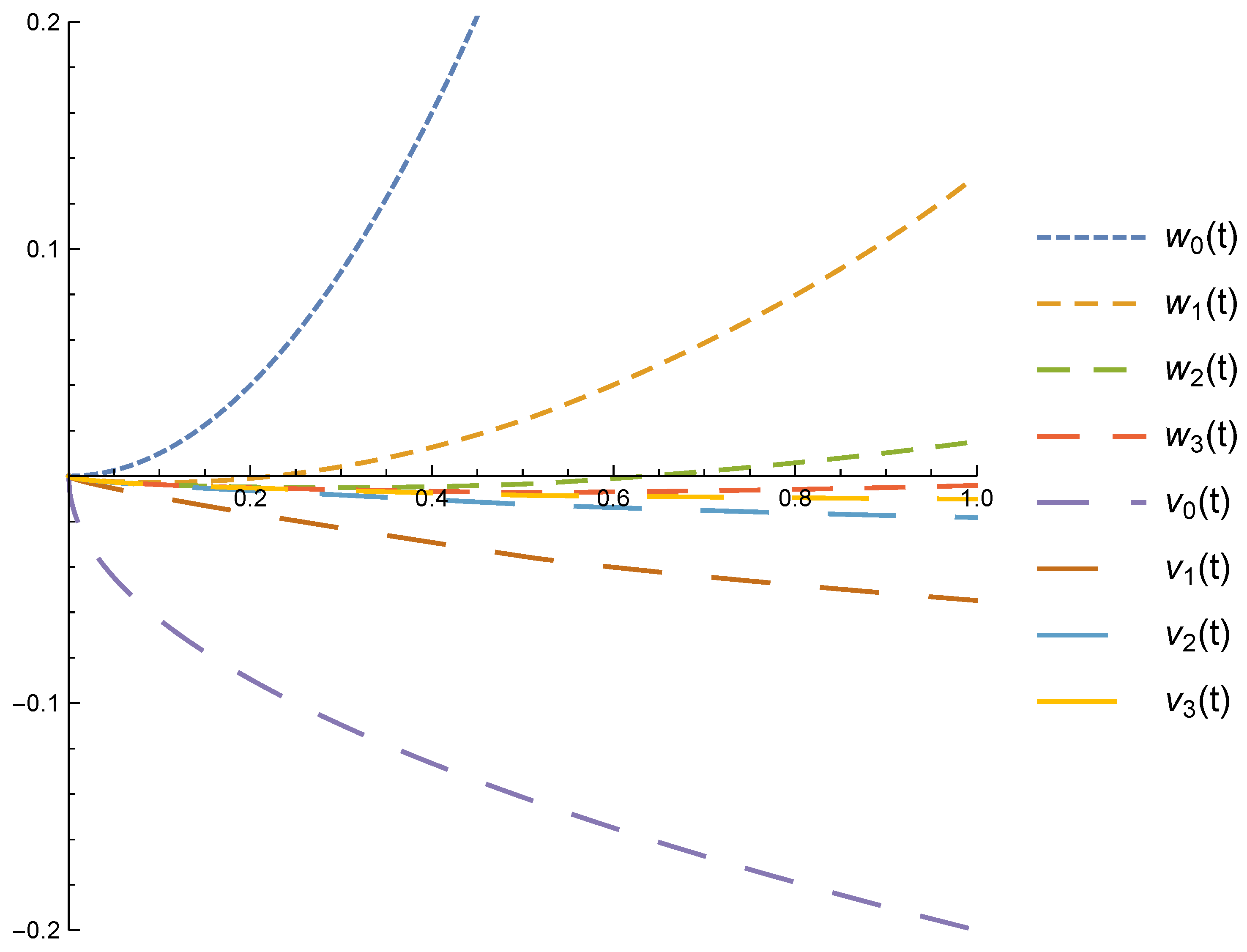
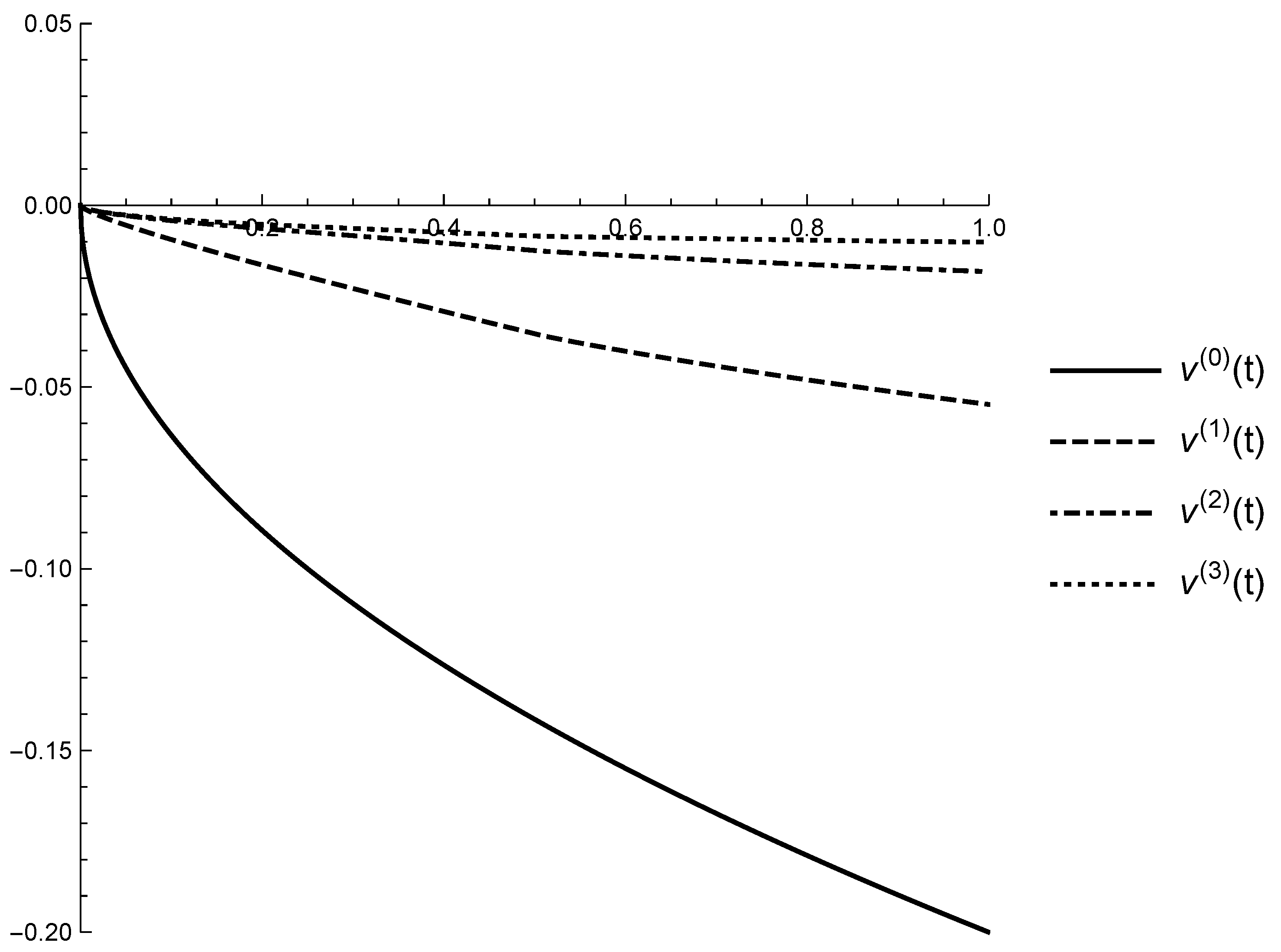
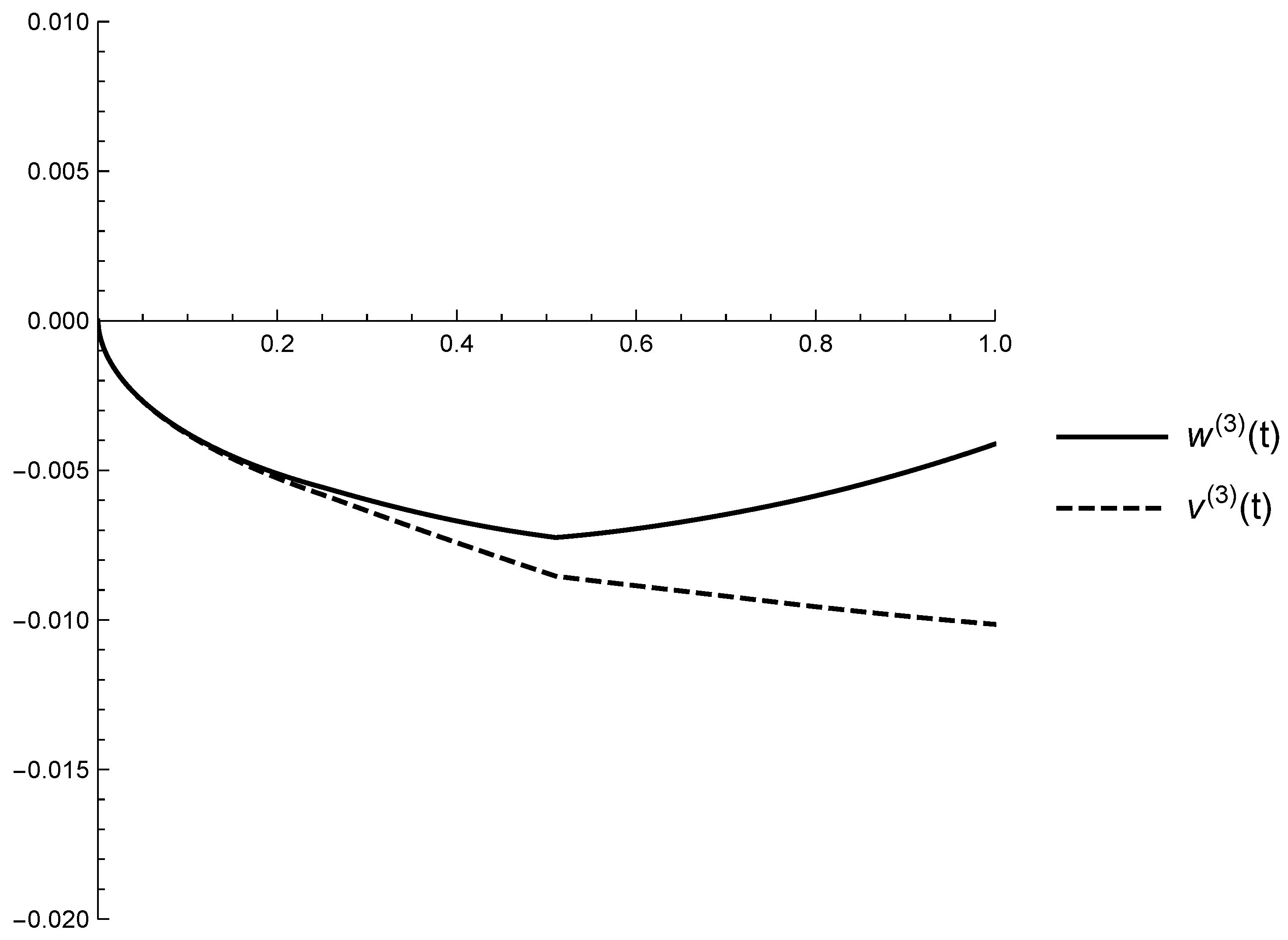
5. Application of the Suggested Algorithm
- -
- -
- -
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Das, S. Functional Fractional Calculus; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Ladde, G.; Lakshmikantham, V.; Vatsala, A. Monotone Iterative Techniques for Nonlinear Differential Equations; Pitman: Boston, MA, USA, 1985. [Google Scholar]
- Hristova, S.; Golev, A.; Stefanova, K. Approximate method for boundary value problems of anti-periodic type for differential equations with “maxima”. Bound. Value Probl. 2013, 2013, 12. [Google Scholar] [CrossRef][Green Version]
- Agarwal, R.; Hristova, S.; Golev, A.; Stefanova, K. Monotone-iterative method for mixed boundary value problems for generalized difference equations with “maxima”. J. Appl. Math. Comput. 2013, 43, 213–233. [Google Scholar] [CrossRef]
- Agarwal, R.; Golev, A.; Hristova, S.; O’Regan, D.; Stefanova, K. Iterative techniques with computer realization for the initial value problem for Caputo fractional differential equations. J. Appl. Math. Comput. 2017. [Google Scholar] [CrossRef]
- Agarwal, R.; Golev, A.; Hristova, S.; O’Regan, D. Iterative techniques with computer realization for initial value problems for Riemann–Liouville fractional differential equations. J. Appl. Anal. 2020. [Google Scholar] [CrossRef]
- Bai, Z.; Zhang, S.; Sun, S.; Yin, C. Monotone iterative method for fractional differential equations. Electron. J. Differ. Equ. 2016, 2016, 1–8. [Google Scholar]
- Denton, Z. Monotone method for Riemann-Liouville multi-order fractional differential systems. Opusc. Math. 2016, 36, 189–206. [Google Scholar] [CrossRef]
- Wang, G.; Baleanu, D.; Zhang, L. Monotone iterative method for a class of nonlinear fractional differential equations. Fract. Calc. Appl. Anal. 2012, 15, 244–252. [Google Scholar] [CrossRef]
- Agarwal, R.; Hristova, S.; O’Regan, D. Explicit solutions of initial value problems for linear scalar Riemann-Liouville fractional differential equations with a constant delay. Mathematics 2020, 8, 32. [Google Scholar] [CrossRef]
- Denton, Z.; Ng, P.; Vatsala, A. Quasilinearization method via lower and upper solutions for Riemann-Liouville fractional differential equations. Nonlinear Dyn. Syst. Theory 2011, 11, 239–251. [Google Scholar]
- Ramırez, J.; Vatsala, A. Monotone iterative technique for fractional differential equations with periodic boundary conditions. Opusc. Math. 2009, 29, 289–304. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| t | ||||||||
|---|---|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| … | … | … | … | … | … | … | … | … |
| 0.05 | 0.0025000 | −0.0024014 | −0.002669875 | −0.0026830 | −0.0026910 | −0.0028370 | −0.0054822 | −0.0447213 |
| … | … | … | … | … | … | … | … | … |
| 0.1 | 0.0100000 | −0.0028030 | −0.003707587 | −0.0037665 | −0.0038006 | −0.0042116 | −0.0094143 | −0.0632455 |
| … | … | … | … | … | … | … | … | … |
| 0.15 | 0.0225000 | −0.0023273 | −0.004371989 | −0.0045293 | −0.0046100 | −0.0053537 | −0.0130148 | −0.0774596 |
| … | … | … | … | … | … | … | … | … |
| 0.2 | 0.0400000 | −0.0010073 | −0.004782033 | −0.0051102 | −0.0052606 | −0.0063855 | −0.0164157 | −0.0894427 |
| … | … | … | … | … | … | … | … | … |
| 0.25 | 0.0625000 | 0.0011752 | −0.004974678 | −0.0055640 | −0.0058104 | −0.0073536 | −0.0196715 | −0.1000000 |
| … | … | … | … | … | … | … | … | … |
| 0.3 | 0.0900000 | 0.0041728 | −0.005025551 | −0.0059818 | −0.0063535 | −0.0083442 | −0.0228876 | −0.1095445 |
| … | … | … | … | … | … | … | … | … |
| 0.35 | 0.1225000 | 0.0080102 | −0.004920663 | −0.0063617 | −0.0068915 | −0.0093546 | −0.0260671 | −0.1183215 |
| … | … | … | … | … | … | … | … | … |
| 0.4 | 0.1600000 | 0.0127018 | −0.004640016 | −0.0066932 | −0.0074170 | −0.0103733 | −0.0291992 | −0.1264911 |
| … | … | … | … | … | … | … | … | … |
| 0.45 | 0.2025000 | 0.0182403 | −0.004175051 | −0.0069743 | −0.0079311 | −0.0113985 | −0.0322849 | −0.1341640 |
| … | … | … | … | … | … | … | … | … |
| 0.5 | 0.2500000 | 0.0246100 | −0.003520597 | −0.0072042 | −0.0084358 | −0.0124294 | −0.0353267 | −0.1414213 |
| … | … | … | … | … | … | … | … | … |
| 0.55 | 0.3025000 | 0.0320137 | −0.002426030 | −0.0071326 | −0.0086820 | −0.0131993 | −0.0378996 | −0.1483239 |
| … | … | … | … | … | … | … | … | … |
| 0.6 | 0.3600000 | 0.0402038 | −0.001086952 | −0.0069496 | −0.0088569 | −0.0138649 | −0.0401436 | −0.1549193 |
| … | … | … | … | … | … | … | … | … |
| 0.65 | 0.4225000 | 0.0490747 | 0.000417801 | −0.0067284 | −0.0090315 | −0.0145008 | −0.0422464 | −0.1612451 |
| … | … | … | … | … | … | … | … | … |
| 0.7 | 0.4900000 | 0.0585998 | 0.002078399 | −0.0064716 | −0.0092072 | −0.0151118 | −0.0442469 | −0.1673320 |
| … | … | … | … | … | … | … | … | … |
| 0.75 | 0.5625000 | 0.0687781 | 0.003887027 | −0.0061807 | −0.0093841 | −0.0157009 | −0.0461668 | −0.1732050 |
| … | … | … | … | … | … | … | … | … |
| 0.8 | 0.6400000 | 0.0796462 | 0.005842443 | −0.0058527 | −0.0095575 | −0.0162662 | −0.0480153 | −0.1788854 |
| … | … | … | … | … | … | … | … | … |
| 0.85 | 0.7225000 | 0.0912844 | 0.007949841 | −0.0054815 | −0.0097203 | −0.0168024 | −0.0497938 | −0.1843908 |
| … | … | … | … | … | … | … | … | … |
| 0.9 | 0.8100000 | 0.1038155 | 0.010211677 | −0.0050684 | −0.0098728 | −0.0173114 | −0.0515115 | −0.1897366 |
| … | … | … | … | … | … | … | … | … |
| 0.95 | 0.9025000 | 0.1174206 | 0.012636895 | −0.0046141 | −0.0100154 | −0.0177952 | −0.0531754 | −0.1949358 |
| … | … | … | … | … | … | … | … | … |
| 0.999 | 0.9980010 | 0.1320345 | 0.015188142 | −0.0041287 | −0.0101456 | −0.0182462 | −0.0547594 | −0.1998999 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hristova, S.; Stefanova, K.; Golev, A. Computer Simulation and Iterative Algorithm for Approximate Solving of Initial Value Problem for Riemann-Liouville Fractional Delay Differential Equations. Mathematics 2020, 8, 477. https://doi.org/10.3390/math8040477
Hristova S, Stefanova K, Golev A. Computer Simulation and Iterative Algorithm for Approximate Solving of Initial Value Problem for Riemann-Liouville Fractional Delay Differential Equations. Mathematics. 2020; 8(4):477. https://doi.org/10.3390/math8040477
Chicago/Turabian StyleHristova, Snezhana, Kremena Stefanova, and Angel Golev. 2020. "Computer Simulation and Iterative Algorithm for Approximate Solving of Initial Value Problem for Riemann-Liouville Fractional Delay Differential Equations" Mathematics 8, no. 4: 477. https://doi.org/10.3390/math8040477
APA StyleHristova, S., Stefanova, K., & Golev, A. (2020). Computer Simulation and Iterative Algorithm for Approximate Solving of Initial Value Problem for Riemann-Liouville Fractional Delay Differential Equations. Mathematics, 8(4), 477. https://doi.org/10.3390/math8040477