Abstract
The use of technology, which is linked to active learning strategies, can contribute to better outcomes in Mathematics education. We analyse the conditions that are necessary for achieving an effective learning of Mathematics, aided by a robotic platform. Within this framework, the question raised was “What are the conditions that promote effective active math learning with robotic support?” Interventions at different educational scenarios were carried in order to explore three educational levels: elementary, secondary, and high school. Qualitative and quantitative analyses were performed, comparing the control and treatment groups for all scenarios through examinations, direct observations, and testimonials. The findings point to three key conditions: level, motivation, and teacher training. The obtained results show a very favourable impact on the attention and motivation of the students, and they allow for establishing the conditions that need to be met for an effective relationship between the teacher and the technological tool, so that better learning outcomes in Mathematics are more likely to be obtained.
1. Introduction
For a long time, human beings have endeavoured to develop new methods to perform tasks in an easier way, with the aim of doing those activities that benefit him in any area of his life faster and more efficiently. It is then that technology comes into play. Despite the fact that technology has several paths, it can be assured that each and every one of them has a common purpose: to help humanity solve some problem that is inherent in it. Information and communications technologies (ICTs) currently occupy an extremely important place in society and the economy. Their importance has been increasing enormously. The concept of ICT has emerged as a technological convergence of electronics, software, and telecommunications infrastructure. Robotics is one of the expressions of technology whose application has extended to various contexts of life. In the educational field, it becomes a valuable resource to facilitate learning and develop general skills, such as socialisation, creativity, and initiative in students today [1].
Speaking of education, the results in the latest PISA test showed that Mexico’s performance is below the OECD average in science (416 points), reading (423 points), and Mathematics (408 points) [2]. According to [3], one of the main causes of school failure in students is a lack of interest and boredom. This is mainly due to the fact that, in most cases, the current education is not interested in generating innovative activities that favour the participation of their students. For this reason, the use of ICTs has been promoted within the classrooms. The use of new technologies allows for an incentive towards learning in students of different educational levels, and the learning of Mathematics is a very specific area.
One of the most relevant challenges in Mexico is the attitude towards learning Mathematics. Currently, it is a necessity that Mathematics instructors find better ways of teaching; this would allow for students to be more empathic and make sense of this area of knowledge. Thus, in most classes nationwide, teachers do not improve the use of teaching materials, due to a lack of creativity, time, proper training, or planning. Hence, the importance of showing how technology allows for significant improvements in attention and motivation towards Mathematics, which, in turn, allows for an improvement in training programs and teaching practices; thus, achieving a positive impact on student learning. The principles of mathematical modelling include learning on our own; using technological devices and basic productivity tools to investigate and produce learning material in an ethical and efficient manner; and, applying numerical, algebraic, and geometric procedures for the understanding and analysis of real situations. The use of a technological platform would help to fulfil the expected objectives.
Although there are already ways to incorporate technology in the classroom, it is still not very common to use robots as a support tool for lesson delivery. Robotics in the classroom not only allows to study topics of automation and process the control in the area of technology and computer science, but it also serves as an aid in learning different areas of knowledge. The robots arouse interest in students, as they are concrete objects striking. An educational robotic proposal can be implemented under an approach that takes the learning environment, the planning of activities, resources, the time needed for the realisation of each of these, and the methodology to perform them into account. In this framework, active learning with strategies for doing, reviewing, learning and applying can be of support to contribute with the construction of mathematical knowledge. When joining these resources, one could ask oneself: What are the conditions that promote effective active Math learning with robotic support?
1.1. Learning Mathematics in Mexico
Mathematics is a universal language that contributes to the development of logical thinking, the ability to reason, and to face new challenges. Learning Mathematics is a subject that emphasises problem solving. If students think critically, they can solve problems effectively [4]. Mathematical competences, according to the Organisation for Economic Cooperation and Development [5] refer to students’ abilities to analyse, reason and communicate effectively when they identify, formulate, and solve mathematical problems in different situations [6]. Mathematical competence “implies the ability and willingness to use mathematical modes of thinking (logical and spatial thinking) and their representation (formulas, models, graphs, and diagrams)” [7] (p. 164). Mathematical competences must be placed as part of the key elements within learning for life.
The Government of Mexico states that the general purposes of learning Mathematics are: (a) to conceive Mathematics as a social construction in which mathematical facts and procedures are formulated and argued; (b) acquire positive and critical attitudes towards Mathematics; and, (c) to develop skills that allow them to pose and solve problems while using mathematical tools, make decisions, and face non-routine situations (Government of Mexico, n.d.). Thus, the profile of the preschool graduate in mathematical thinking is [8]: “he or she counts at least to 20, reasons to solve problems of quantity, builds structures with figures and geometric bodies, and organises information in simple ways” (p. 68). For the primary education profile: “he or she includes concepts and procedures for solving various mathematical problems, and for applying them in other contexts” (p. 74). Finally, for secondary education: “he or she expands his knowledge of mathematical concepts and techniques to pose and solve problems of varying degrees of complexity, as well as to model and analyse situations. He or she values the qualities of mathematical thinking favourable to Mathematics” (p. 80).
In Mexico, not all of the students have the same opportunities to learn. Those who cannot access mathematical content in school are at a lifelong social and economic disadvantage. According to [2], the lack of equal learning opportunities in the Mexican education system leads to the reinforcement of gaps and inequalities in society. Learning in Reading, Mathematics, and Science remains below the international average. According to the PISA report, only 1% of students performed at the highest levels of competence and 35% of students did not achieve a minimum level of competence. The obtained results continue to show a lack of competence in Mathematics [3].
Mexico seeks quality education that is innovative in its pedagogical practices, and that has the necessary means for the integral development and greater well-being of its society. In order to achieve this, socio-educational policies search for new opportunities in order to reduce inequalities between communities, promote training in values, minimise gaps, and promote equity [9]. In this regard, the Secretary of Public Education (SEP) and the National Institute for the Evaluation of Education (INEE), highlighted the importance of reviewing and redesigning existing educational programmes and modalities with the aim of: (a) facilitating access to all citizens, (b) encouraging the development and use of new technologies, and (c) promoting the skills of all students in order to ensure a full life. The integration of technologies and, in the case of educational robotics, helps to develop various skills and promote the construction and acquisition of knowledge in general, and Mathematics in particular. To this end, they designed the National Plan for the Evaluation of Learning (PLANEA), which classifies those evaluated into four levels of mastery: I (insufficient), II (basic), III (satisfactory), and IV (outstanding). This plan aimed to assess the teaching-learning processes and the learning achievements in Language-Communication and Mathematics [10].
Thus, the Secretary of Public Education [8] raises the need to ensure quality of learning in basic education, and educational inclusion and equity for the construction of a more just society. If we focus on the area of Mathematics, we seek to modify the actions with innovative practices, integrating the use of technologies in teaching methodologies for learning them, and promoting the development of mathematical skills.
1.2. Educational Robotics
Educational robotics (ER), which is also known as pedagogical robotics, is a discipline that aims at the conception, creation, and implementation of robotic prototypes and specialised programs for pedagogical purposes [11]. ER is not a new concept, but, rather, it has been growing exponentially in recent years. It has a major impact on learning [12], and it is associated with the STEAM disciplines (Science, Technology, Engineering, Art, and Mathematics) for the development, skills, and understanding of mathematical, physical, engineering, and related concepts [13,14,15]. Across the various faculties and universities, and in order to reduce the gender gap in STEAM careers, we have to train students in/with robotics related skills in all disciplines. Additionally, in this way, promote learning centred on the student, on his or her interests, and on the demands of society, using innovative methods; and, promoting critical training, in order to develop active and co-participating citizens in today’s society [16,17].
It could be defined as “an interdisciplinary discipline, which requires the construction of a technological object with a specific purpose (some authors call it an educational robot, others call it a robotic prototype, others refer to automatisms…); it aims at the pedagogical field; and it develops key competences and skills for the students of the 21st century” [18] (p. 4).
The integration and use of educational robotics in the teaching-learning process in pre-school, primary, and secondary levels can become visible, and be a turning point, as a resource to address the diversity of the classroom, as a means to help the inclusion of all students, as well as keep them active and motivated [15,19,20,21]. Additionally, it can be utilised as a tool to promote the construction of knowledge and the achievement of results. Therefore, when working with ER, apart from working on science and technology, the aim is to promote other cross-disciplinary skills, such as: creativity, communication, collaboration, critical thinking, teamwork, innovation, the development of solutions to problems, digital skills, and computational thinking [22,23]. In order to do this, teachers must have basic knowledge to be able to teach the contents with robots [24].
Introducing students to the areas of science and technology, in the case of Mathematics, through play and constructionist learning in order to generate new knowledge, is one of the goals of the usability of ER in the classroom. Learning with robots offers students intrinsic motivation, and invites them to investigate, foster their curiosity and imagination, to ask questions, to work in teams, to overcome challenges, to make decisions, and to be responsible of their own process [12,25].
There are many robots on sale, according to shape, size, function, working environment, and autonomy. Depending on the shape, we find: zoomorphic (imitation of a creature, e.g., bee), humanoid (reproduction of the shape of a human and its movements, in this case, the NAO robot), hybrid (combination of the above), and polymorphic (different shapes, adapting its structure according to the task). The size of the robots can be: robots, microrobots, nanorobots, or nanobots (the smallest, nanometric size). Function: domestic, medical, military, entertainment, space, educational, among others. In relation to the work environment: stationary robots (they are fixed and immovable, they are the majority of industrial robots), ground, underwater, air, and microgravity robots. Additionally, in terms of their autonomy: tele-operated (drones) and semi-aquatic [26].
The NAO robot, humanoid robot, was born in 2008 and developed by the company Softbank Robotics, we are currently facing the model evolution v5. The NAO robot measures 58 cm, weighs no more than 5 kilos, speaks, listens, sees, relates to the environment as programmed, and interacts naturally. It is capable of perceiving its environment from multiple sensors. It is composed of two cameras, four microphones, nine tactile sensors, two ultrasonic sensors, eight pressure sensors, an accelerometer, a gyroscope, a voice synthesiser, and two speakers [27]. The robot includes a graphic programming software, Choregraphe, which allows accessible communication with the NAO; this software is a graphic programming interface by means of blocks, which provide specific tasks for the NAO [28].
NAO has two key advantages: (1) its versatility (customising its functions and individualising its uses) and (2) its body language (freedom of movement, adapted to the environment, manageable and friendly, and it is designed for any age). In relation to Education, NAO is designed to be used from the age of five up to university. Its use in the classroom means that the students are more playful, motivated in the learning process, able to interact and communicate, and establish a link between theory and practice. On the part of the teaching staff, they have more engaged students, and more dynamic classes, promoting student interest, and obtaining results of the programming in real time. As far as researchers are concerned, NAO has been used in different universities, as it is considered to be ideal for practical experiments, as it is an intuitive software that offers endless possibilities with multi-language programming [27].
1.3. Active Learning and Robotics in Mathematics
Learning environments for Mathematics require the diversified use of methods, techniques, and strategies that support the acquisition of processes of analysis and construction. One technique that has proven to be effective in developing mathematical skills is active learning. In active learning, the teacher uses a methodology that seeks to promote the participation of the student as a prosumer of knowledge [29]. In this technique, the teacher must plan continuous stimulation activitie, so that the student individually or collectively performs procedures of higher order: analysis, synthesis, interpretation, inference, and evaluation [30]. According to [31], the family and community socio-productive activities in which students participate in on a daily basis constitute areas of experience that demand their incorporation into the didactics of Mathematics focused on problem solving.
It is important that the practical experience that students have had regarding mathematical reasoning be considered within the teaching of Mathematics in a formal school space, with the support of practical research. In the study [32], the impact of the use of an Adaptive Tutoring System (ATS) on the development of three mathematical competences was measured: the use of symbolic language, modelling of mathematical problems, and problem solving through mathematical reasoning. Research [33] suggested increasing the level of student mastery of mathematical concepts, while applying the concept of active learning that involves collaborative metacognitive activities among students during the learning process. Through this strategy, it was possible to improve the understanding and mastery of mathematical concepts.
The current educational practices postulate learning as a construction of knowledge, the attention has special relevance in the storage and integration only of the information that is relevant, becoming an element that the student must actively train. Thus, active, dynamic, participative learning, far from passivity, is done with the attention and concentration focused and directed towards the significant elements of it; only in this way, the acquired knowledge will be permanent and effective. In conclusion, attention and concentration are both basic elements of all learning. Project based learning has a key place in active learning. Project-based learning is an example of active learning and it is a current instructional strategy that is driven by students in an interdisciplinary, collaborative, and technology-based manner [34]. Students who implement project-based learning perform better after using this method in teaching and learning sessions [35].
The phases of active learning are differently defined, depending on the author who writes about them. Nonetheless, the main elements remain common among models. One version that is quite easy to understand is presented in [36,37], and described in detail in Table 1.

Table 1.
Stages of active learning.
Furthermore, in [38], it is explained how active learning is not a subject area competence (Table 2), but that there is a wide variety of ways in which it can be used in the life of the classroom: from an individual activity to the development of a group project. In all of them, the same processes and principles are applied: Do, Review, Learn, and Apply.
Table 2.
Examples of active learning in a range of subjects.
The examples that are shown in Table 2 follow a similar process, a process that can be described as a cycle. This cycle models the process of learning from experience with four phases: Do, Review, Learn, and Apply [37,38]. To this cycle, it is also important to add a previous stage in doing, Planning, as shown in Figure 1, below.
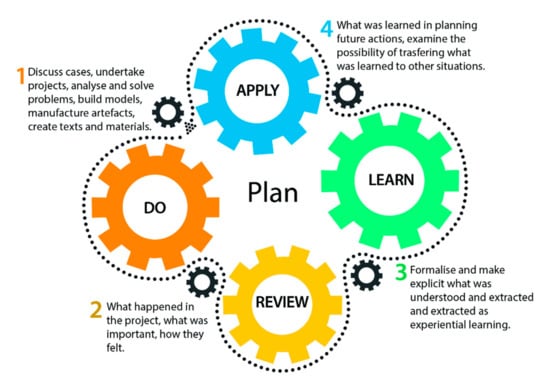
Figure 1.
The active learning process (adapted from [36]).
When planning the teaching-learning processes, teachers focus on the experience they want to show and carry out with the students. To this end, the model of the phases presented by [37] can help them to acquire the learning. Active learning has been integrated to support the construction of mathematical knowledge, both at the basic education level while using open educational resources and learning objects [39] and in higher education in virtual and remote laboratory environments [40]. Project-based learning enhances students’ academic performance.
When planning the teaching-learning processes, teachers focus on the experience that they want to show and carry out with the students. To this end, the model of the phases that are presented by [36] can help them to acquire the learning.
Math teaching can find great support in the use of technology. Math learning should be done while using instructional media [41], particularly visual learning media, with the support of technology-based ecosystem environments) [42]. Ref. [43] confirmed, through their research, that students who access a multimedia environment provided by their teacher on a blended learning basis can perform significantly better than those that are taught in the classroom. In [44], the design principles that underlie the development and delivery of a blended learning professional development program for high school mathematics teachers were analysed and theoretical frameworks where face-to-face and computer-mediated instruction, teacher identity formation, and structural and basic characteristics of effective teacher professional development are coordinated were identified: the form, duration, and coherence of activities; the nature of teacher participation; focus on content knowledge (mathematics); and, opportunities to engage in active learning. The implementation of visual and technological resources has had good results in the teaching-learning process of Mathematics.
Numerous studies have been conducted on technology applied to the teaching of Mathematics. Ref. [45] developed a research that allowed concluding that cognitive, affective, and metacognitive factors can be modelled and supported by intelligent tutoring systems. The system also helped to improve Math performance on standardised tests, as well as improve student engagement and affective outcomes. In [46], their study found that students who learned using Microsoft Mathematics performed higher on their assessments and a positive effect on student confidence in Mathematics was observed. The work [47] focuses on the description of the principles on which a hypermedia tool (Hipatia) is based and then analyses its impact in three key areas: the learning process of students in Mathematics, their self-management, and affective-motivational variables, such as perceived utility, perceived competence, intrinsic motivation, and anxiety towards Mathematics. The studies focus not only on the cognitive aspect, but they also analyse other elements, such as motivation and confidence.
2. Materials and Methods
In all scenarios, the robot was used as a support tool, which facilitated the teacher’s action in the execution of explanations, interactions with students, and review of results. The design and execution of the robot intervention was different for each scenario. It is important to point out that decisions by the administration of each school limited the participation of the protocol in each one of them; therefore, the number of visits, duration of interventions, and application of tests was different, in accordance with the guidelines that each school determined and approved for the execution of the protocol.
2.1. Plan
To develop this project, several aspects were considered, and a selection of topics was carried out for the planning of robot support for the different scenarios. The main aspects to consider are the number of visits, measurement tools, exams, and interviews, as described below.
Visits: in the case of the primary school, two visits were carried out on consecutive days, having almost one and a half hours to carry out the planned routines in mathematical reasoning, through activities to work with distance measurement and fractions. Our project team carried out the visits. For the secondary school case, the robot assisted in four full 50-min. classes, one for each visit. In each session, the teacher used the robot at certain times that were previously defined in the design of the sessions. Finally, in the case of high school, the robot visited the class on a daily basis for a week. Three visits were done at different times of the semester. The first visit was carried out in an introductory way, so that the robot had already been presented with the students for creating a first impression by them. The next two were to support the teacher in the topics established from the beginning. It was the teachers who manipulated the robot when they needed it.
Measurements: in each scenario, a control group and an experimental group were established. Same interventions or classes were carried out with the intervention of the instructor or with the instructor using the robot. The intention was to compare and be able to measure the impact that the robot had among the students. Therefore, tests with numerical results were applied, as well as observation scales in order to measure motivation [48]. Both of the tools were applied in two types of groups. Only in high school were the tests were given before and after starting the robot interventions. In addition, interviews were carried out on the experience carried out with the participating teachers and, in the case of high school, with the students.
Tests: the tests were different for each scenario. At elementary school, a questionnaire was applied, and the students had to solve a mathematical exercise based on the explanation of the topic made by the robot. This exercise was chosen from the Mathematics book that was used by the course teacher, and the number of correct answers, in this questionnaire, was accounted for. For secondary school, an exam was conducted on the topics chosen by the teacher, those where there was support from the robot. Almost all of the exercises were about Analytical Geometry. The design of these exams was done by the teachers in charge of the two groups. In the case of high school, the applied exams were designed and were considered in the planning of the course from the beginning. That is, they were the standard exams that are commonly applied in the subject of Trigonometry, coordinated by the Department of Mathematics of the institution in question.
Interviews: they were carried out in order to find out the opinion of the teachers involved, and the more formal implementation of the structure of the interview, as well as the testimonies of the students and teachers, was established in the high school. As can be appreciated, the protocol became more formal as experience was gained from the previous scenarios. In Section 3.1 of this document, more details of each scenario are given, and a more detailed quantitative analysis of the obtained results is carried out.
The planning for the project is summarised in the following three aspects:
(1) The robot: as mentioned above, a NAO robot was used to support the teacher. The robot delivered the explanation of the topic to be developed, provided that the appropriate environment was put in place. In addition, sometimes it guided the exercises that were established by the teacher. Furthermore, the robot confirmed to the students whether the exercises had correct results. Figure 2 shows the general way in which the robot interacted.
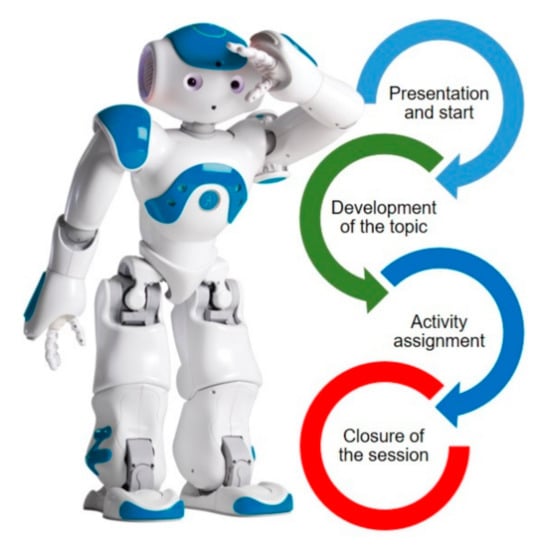
Figure 2.
Structure of the sessions.
(2) The scenarios: primary school, two groups of 3rd and 5th grades were visited, with the completion of mathematical reasoning exercises in two consecutive visits. The teacher did not directly use the robot, which carried out demonstrations of previously chosen topics, but was autonomous in carrying out the activities. Before and after, questionnaires were made to the students in order to compare the performance obtained.
For secondary school, four visits were made to the school, with a control group and a treatment group (using the robot), before and after exams were compared, in addition to the observation scales of motivation and attention for the students. The teachers selected and designed Math exercises for their execution.
In high school, performance and motivation were observed in five groups, two experimental and three control groups, during an academic semester with daily visits in full intervention weeks. The subject was trigonometry and the teachers designed and planned the exercises, with greater control over the way the robots intervened. Before and after, the results in the semester were compared as well as the measurement of the students’ attention.
(3) The measurements: for quantitative analysis, according to the scenario, teachers applied tests and/or exercises, aimed at measuring the students’ learning, and most of them were conventional exams.
In all of the scenarios, a qualitative analysis was carried out, based on previous works [47]. In these analyses, the applied scale was composed of the following indicators: concentration (precision and recall), habituation, withdrawal, distraction (neglect), and interest in the task (motivation and enthusiasm). Based on the definition of care and the indicators that compose it, operational definitions of these indicators were developed to be later translated into observable items of dimensions of care.
The analysis and taking of the scales were carried out by students of Psychology, taking care to observe the guidelines of the reference indicated in terms of human behaviour.
2.2. Methodology
We explored different approaches in three different scenarios in order to shed light on what constitutes a successful application of a robotic platform for enhancing active learning.
The scenarios were divided by educational level. That is, elementary, secondary, and high school settings. Each one of the interventions is described below.
Scenario 1: elementary school. There were two interventions undertaken to two sections of the third and fifth grades, with 28 students each. For these visits, activities were planned without teachers’ involvement. They limited their participation to allowing the research group to enter the room and coordinate the activities, manipulate the robotic platform, and perform a brief interview at the end of the session, both for students and teachers. Evaluation was done by applying quizzes to sections where the robot was used, and to others where it was not, so that a results comparison could be made.
Scenario 2: secondary school. For this scenario, visits were performed every Friday for an entire month. This time, two sections were provided use of the robotic platform, and another one was observed as a control with no treatment. Each section had 25 students enrolled. Another variation was that, this time, teachers were involved in planning the activities, including the topic to cover, and the way that the robotic platform was to be used. A group of psychology students was active making observations throughout the process, and capturing both qualitative and quantitative information for later interpretation. Interviews with students were also performed. The emphasis was on assessing the levels of attention and motivation gained by the students translated into measurement scales, as well as performance on the subject matter.
Scenario 3: high school. For this scenario, the actions became more complex. The robotic platform was applied to two treatment groups, and observations were also made to three control groups. The robot was used in every class during an entire week at the beginning of the course, then it was done again in the middle, and at the end of the course. The involvement of teachers in this case was intensive, being trained in the use of the robot, and deciding together the moments and themes where the robot would intervene. Pre- and post-tests were performed for all sections, in order to compare performance results. Additionally, as in the previous scenario, Psychology students undertook behavioural observations and made interviews and testimonials.
For all scenarios, an assessment on how well the process met the requirements of the four cited phases of active learning was made, assigning a rubric-like success categorisation for each. This assessment was made qualitatively, and was based on panel expert discussions, drawing from the experiences that were obtained at each scenario. A comparison was then derived in order to identify the appropriate success factors.
Figure 3 summarises the overall methodological process.
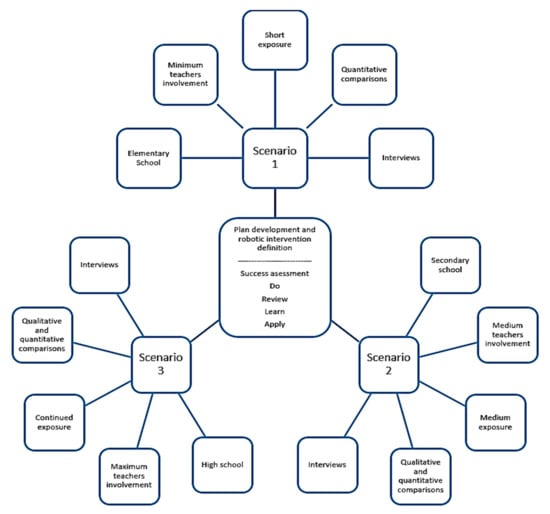
Figure 3.
The robotics & active learning exploratory methodological process.
3. Results
3.1. Quantitative Analysis
The use of the analysis instruments that are mentioned in Section 2.1, of the different scenarios grew gradually, starting in primary school, improving aspects of implementation in secondary school, until reaching a more developed scenario, with a longer participation time in high school.
3.1.1. Primary School Tests Performed
Two different sessions were scheduled, taking into account that they were students from third and fifth grades, for a total count of 65. In these sessions, it was evaluated how much attention the students paid to the class, if they retained more information with the help of the robot, and results were compared with a class without robotic help. The sessions were designed in order to address the following topics: propagation of sound, the metric system, and whole number fractions. These topics helped to develop mathematical reasoning and were approved as examples of application by the teachers. All the academic procedures designed by the team followed the following structure: a personal presentation, a presentation of the robot, a brief explanation of the topic, a learning activity, an exam, and a questions session by the students.
For the propagation of sound activity, it was observed how far the sound could be detected, having a “receiver” and a “transmitter”. In the session without the robot, the receivers would be the students and the transmitter would be the teacher. Instead, in the session with the robot, the transmitters would be the students and the receiver the robot. In both cases, the activity would consist of the transmitter speaking at an initial distance and going backwards until the receiver can no longer hear it, once this happens the transmitter will begin to speak through a foam cone, until the same happened, and later on by a paper one. In the case of the metric system topic, the activity consisted of the students having a piece of tape 2-m long having a different colour every 20 cm. An object would be placed at the beginning of this tape, either provided by the teacher or the Nao robot, and it would move forward or backward through each colour. The student should observe the distance from the beginning to the position of the object to attain a better perception of the measurements. Finally, the last activity was to explain the components of a fraction, particularly how to convert a fraction with whole numbers and equivalent fractions. To do this, some examples of fractions, equivalent fractions, and fractions with whole numbers would be seen visually to make the subject clearer. Once the topic was explained, an activity would be carried out reaffirming the knowledge acquired.
In the last session, Psychology students were present to observe the interaction of the teams. The session was applied in two groups, in order to observe differences, and it only occurred in one with the robot. In this session, the topic of fractions would be explained, and examples would be provided for the students to observe. Later, an exercise chosen by the teacher would be carried out, from the book of Mathematical Challenges for fifth grade students. To end the session, a test was applied in order to measure the knowledge acquired.
Some of the results obtained for two of the indicated activities are shown below. Figure 4 shows the percentages of students in a range of scores on the sound propagation test. It can be observed that there was a reduction of 17% in the number of students who obtained a grade that is smaller than seven, thus increasing the proportion of passing grades, which is six or higher.
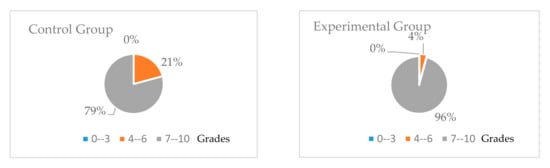
Figure 4.
Test result: sound propagation.
Figure 5 shows the results of the three parts of the session: initial prior knowledge test (three questions), final test for comparison with the initial test (three questions), and final question asked during the session.
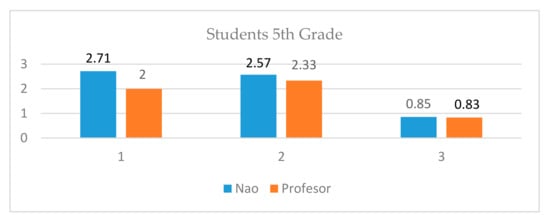
Figure 5.
Test result: fractions with whole numbers.
For the results of attention to the class with the robot, an observation scale made up of 34 questions was used, which are grouped and measured the effect in the following dimensions: (1) concentration (precision), (2) concentration (recall), (3) habituation, (4) de-habit, (5) distraction, (6) interest in the task (enthusiasm), and (7) interest in the task (motivation) [28].
In Figure 6, the results obtained on the observation scale are shown.
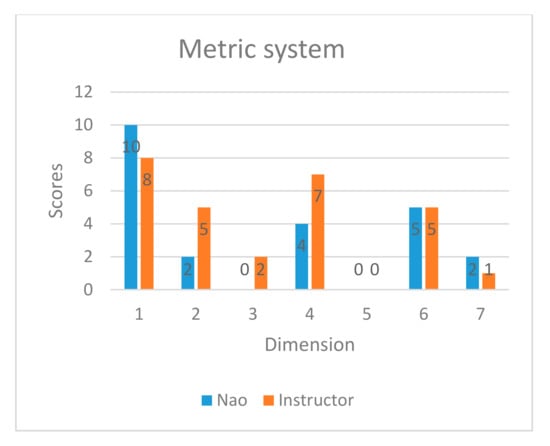
Figure 6.
Results of the observation of the activity of the metric system.
When observing the set of all the graphs, it was determined that the favourable points for the NAO robot are: greater concentration, less habituation and dishabituation, and greater interest in the task (motivation). It has to be noted that lesser habituation and dishabituation are desirable, since they indicate that the students will not become bored with the robot with time, and they will not create a dependency on the robot either. There are no apparent differences for distraction and enthusiasm. This can be the result of the influence of observers in the classroom, so it should be more deeply looked into in future studies.
3.1.2. Secondary School Tests Performed
In collaboration with the psychology group, the directors of the institution and the teachers, it was decided that the robot would interact with the students during four sessions of the Mathematics class, on Friday at 7:35 p.m. The group that did not interact with the robot was observed during their Math class on Friday at 2:30 p.m. Before each session, both of the teachers explained the objective of the class and the robot would be prepared for its interaction (analytical geometry). Among the forms of interaction were mainly the dictation of exercises, the response to those same exercises, answers to questions that may have arisen during the class, and even participating as a student during the class. Finally, during the sessions, the psychologists were in charge of observing the students and filling in an observation scale.
Through the tests carried out before and after the sessions, the results of the tests that were applied to the students were averaged, and that both of the observed groups obtained during the investigation.
The observation scales that were performed by the Psychology students turned out to be a more influential tool for hypothesis verification. Thanks to these questionnaires, significant differences could be found in the behaviour of both groups, as shown in Figure 7. This graph shows how behaviours were present and how they varied through the different sessions. It is indicated in the “yes” part of each session, and the frequency in which the behaviour was observed. Similarly, the “no” section indicates the absence of each behaviour at certain point in time for each session. Thus, it is important to note the increase in the “no” part for habituation (from 7 to 11) and distraction (from 4 to 5), from session 1 to session 4, with this being favourable since they are unwanted behaviours.
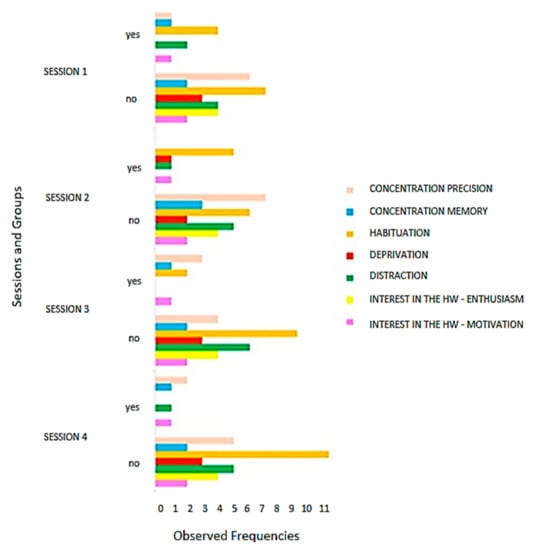
Figure 7.
Comparison of the observed behaviour dimensions.
3.1.3. High School Tests Performed
The robot was a support tool for the teacher in the teaching of a hybrid teacher-robot class where two topics of the subject were addressed. During the first visit, the topic would be the statistical analysis of graphs. The disciplinary competencies to be developed are graphical representation of statistical data and the generic competence was collaborative work. For the second visit, the collaborative activity would be dealing with the right triangle solution in the measurement of inaccessible distances within the campus facilities. The disciplinary competencies to be developed were right triangle solution and generic collaborative work.
At this educational level, the teachers were co-designers of the entire research strategy, even controlling the robot to a much greater extent than in the other scenarios. For this, experimental tasks were carried out, divided by periods of six months each. The first was the design and planning of the sessions to begin preparing the programming of the robots, following a structured script by the teachers in charge of the groups. This task focused on the detection of errors in the programming of the robot and dynamics of class teaching and their respective evaluation. The second was the teaching of class by a NAO robot and a Math teacher, following a script that was similarly structured by the high school teaching team. It was expected that the explanations and topics given by the robotic platform would follow the same thematic guide that was used in the high school session plan.
Together, the behaviour of the students was analysed, through the application of a behaviour observation protocol more appropriate for this scenario. The project was carried out in three control and two experimental groups, with the intention of observing more aspects in a population of around 140 students in total.
Figure 8 shows the results of the exams applied as pre-test and post-test at the end of the semester. In all cases, it is clear that the bar for the experimental groups is higher than the one for the control groups. This means that students scored higher with the use of the NAO. This is more evident in the case of the second teacher, where the grades vary in a range of three to four points between exams.
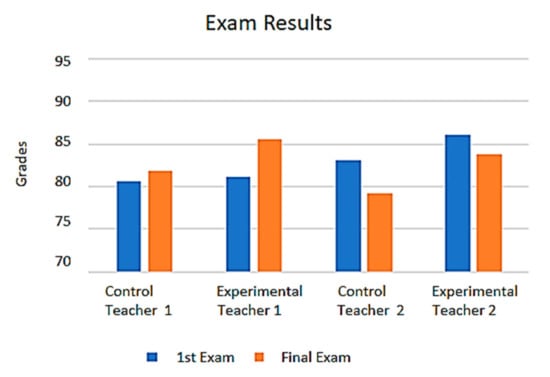
Figure 8.
Ratings obtained by the groups.
Figure 9 shows the relative percentage of occurrence of the different behaviours that were organised by the dimensions of the observation scale during a class session (concentration, habituation, withdrawal, distraction, and motivation). The percentage is used since the groups are not equivalent in number of students and in the total frequency of the behaviours, then it is weighted on a percentage, so that all are comparable.
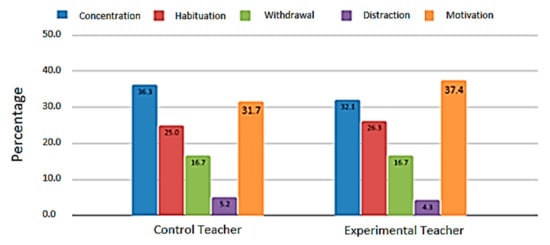
Figure 9.
Behavioural observations by dimensions and group.
It is observed that the most concurrent dimensions are concentration and motivation among all groups. However, there is also a certain tendency for increase in these dimensions from the control group to the experimental group in the respective groups of each teacher.
3.2. Qualitative Analysis
Based on the observations made, it was clear that attention and motivation were boosted for the students at all levels. Nonetheless, the differences in the planned activities played an important role in the level of success achieved for each one of the four phases of active learning amongst scenarios. Now, we will discuss all three scenarios for each phase at a time.
Phase 1: Do
At this stage, it is expected that some stimulating activities will trigger motivation and interest by the students. It is expected that students themselves will decide on their learning strategy, and they will reflect on the results along the way, while they are still performing the task.
For the elementary level case, the activities posed and the presence of the robot did, in fact, stimulate the interest of the students. Nonetheless, they had almost no saying in the learning strategy. Their autonomy was limited to trying to solve the problems in the best way possible, once the instructions were given and understood. At the end of the class, they were to reflect a little on how they felt during the activity, and an example was analysed for application in the real world. Hence, a medium level of success was obtained in strategy decisions and in reflecting on one’s own learning process.
The secondary level case was equally motivating in terms of the presence of the robot. For this scenario, the teachers solved problems, which then needed to be addressed by the students with the aid of the robot. During the process, partial results were analysed with the teacher, and corrections were made accordingly. This represented an increase in learning awareness by the students. However, it can still be considered to be a medium level of success.
Finally, when considering the high level case, challenges and exercises were presented for the students to solve, which were designed by the teachers, and they used the robot as an aid for their solution. Most exercises were trigonometric problems with examples. In this occasion, students were responsible for establishing the route to solve the problem, using the robot as well as the information that were provided in the class. The robot served as a tool for verifying results. Students received feedback during the task, not only about results, but about the theme’s objective, thus restating the results. This process was quite satisfactory for the independence of the students in deciding their own learning strategy, and medium success was achieved for reflecting on their knowledge while doing the task.
Phase 2: Review.
In this phase, it is expected that students will take breaks during the task to become aware of what has just happened, what was important, and how they felt. Subsequently, they monitor their own progress and review their plan. Finally, they document their observations and learning outcomes.
For the elementary school scenario, students commented on the routine that was shown to them and explained, in their own words, what the session consisted of, and how well they believed they understood the lesson. In the second session, they only mentioned how the robotic platform had helped. On the first visit, the students discussed the experience, and commented about what was about to happen in the second visit, but had no say in deciding what that would be, or relating it to their learning process. No documentation was made by the students. The general success score was medium for stopping to evaluate progress, and for monitoring it. Furthermore, it is low for documenting their knowledge acquisition process.
For the second scenario, there were time stops to review and share solutions to the rest of the class, discuss their efficacy, and reflect on the problems and results. They discussed their progress and their experience with the robot. These results were within the desired range. However, documentation focused more on their experience with the robot than in assessing their own learning process.
For the last scenario, the high school students discussed questions that are triggered by the robot or the teacher. The class planning included review and adjustment times, and the students received new exercises that were applied to alternative contexts in order to improve their comprehension of the themes. Constant documentation was included in the process, making this stage considered to be successful.
Phase 3. Learn
For this phase, it is expected that the new ideas that are generated by the activity be made explicit. Students are responsible for identifying on their own their learning outcomes. Additionally, they identify barriers for their progress and propose new strategies.
In the elementary case, the objectives of the exercise were made explicit by students with the authorisation of their teacher. Additionally, there was a conversation space provided for them to verbalise what the experiment consisted of, but suggestions were only given as commentaries by the students. These elements drive to give a score of medium, in terms of the first two elements, but deficient in the proposition of new strategies.
The secondary school scenario, on the other hand, counted with a planned strategy to develop via the robot and the teacher together to make the learning outcomes explicit. Even though it was positive overall, it was not as effective as expected, since it resulted in being somehow confusing for the students. Some exercises were assigned to externalise what was being learned, and students were interviewed at the end. The comments gathered had no influence in the planning of the next sessions. This phase was considered to be positive in making learning explicit, but medium for identifying barriers and deciding strategies.
For the high school level, a space was given to analyse the learning process with the students, and together define strategies for the next sessions. The identification of barriers fell, in turn, a little short.
Phase 4. Apply
This stage is certainly the most complex, and it requires the greatest maturity of the students in the use of active learning. Therefore, it is the most difficult to achieve. First, future actions are planned based on new discoveries and learnings, and the possibility of transferring the knowledge gained to other situations is examined. Students are in charge of reviewing their plans, building on their recent learning experiences, and they move forward to plan future observations and experimentation of their learning strategies.
For the elementary school scenario, this was not covered, since only some documentation of the experience was made by the research team and considered for application in other similar contexts. Nonetheless, this activity did not include teachers or students, making it deficient.
The results improved marginally for the secondary level students, where the experience lived allowed for preparing and improving the process for future situations. However, no significant participation by the students was observed for experimenting learning strategies, beyond some reflections on the effectiveness of the robotic platform as an aid for their learning process.
Finally, the outcomes are far better for the high school scenario, where time was given to reflect on lessons learned to assess the applicability of the process to other contexts and define pertinent improvements. This was explicit also as an activity requested to the students where they had to describe how to apply the knowledge obtained to other domains. The weak point, considered to be a medium success, is that related to the relatively low impact of students’ recommendations to redefine the course strategies in future scenarios.
Table 3 presents the summary of the success scores assigned in each case. The first score is the predominant one, and the one after the hyphen indicates there is a small component in a higher or lower category.
Table 3.
Success scores.
In summary, Table 4 shows the most relevant aspects regarding the tests carried out in the three scenarios, not only qualitative and quantitative, but also a comment that we highlight about each experience obtained.
Table 4.
Summary of observations and test results.
4. Discussion
These results lead to think that there are many factors at play that need to be considered. The robotic solution will never result in significant learning improvement unless accompanied by the right strategy. However, it is a great tool for attracting interest and motivating students to participate, regardless of level. The active learning process, on the other hand, needs to be carefully planned according to level, since the cognitive capabilities and styles of the students vary greatly depending on it. Invariably, the robotic platform and the active learning strategy have a great potential to generate synergy and be more effective when well harmonised.
Another issue that is worth mentioning is the level of involvement of the teachers. The more prepared and comfortable to use the robot, the better they can plan and adapt their strategy, based on the feedback and outcomes that were provided by the students. This allows for the flexibility needed to customise learning strategies to each student and makes them responsible for their own learning. In the long run, they may develop the right level of maturity to be real active learners. It is also important to note that digital skills acquisition has greatly increased its relevance, not only for students, but for teachers. Today’s digital agendas introduce two essential axes to work: on one hand, the trend towards a digital education, and on the other, the acquisition of digital competences and skills for digital transformation [49]. Studies, such as [50,51], highlight the shortage of digital competences in initial training and the lack of knowledge and skills on educational technologies for teaching practice in pre-school, primary, and secondary classrooms.
The time of exposure also seems to be an important issue. Those who were exposed longer to the robot, and to well planned activities, obtained more significant results. One or two sessions might even be counterproductive, as they raise expectations that will no longer be met, causing discouragement of the students.
Finally, capturing behavioural data and observations may be greatly enriched when combining techniques, even including the students themselves as self-documenters. Quantitative and qualitative techniques and assessments will provide a better panorama of the situation. The documents obtained always need be shared and discussed, to gain collective intelligence, and provide more robust changes.
5. Conclusions
In previous years, different scenarios have been developed, in which a humanoid robotic platform has been used in order to increase motivation and interest in students towards Mathematics. The presented case studies show that the proper use of a robotic platform, together with an appropriate teacher participation, can mean giving high-quality hybrid classes, enhancing the student’s attention to the topics that are exposed by changing the stimulus, and obtaining effective learning. The results presented above show a numerical improvement in the scales that are used to assess the presence of specific behaviours, and performance in all scenarios. Even though these results should be looked at with caution, they provide a good perspective of the potential usefulness of Robotics in Mathematics teaching. The ultimate goal is to make learning more meaningful, which should translate into better grades and better abilities for students overall.
The study highlights the motivation of teachers to learn more about the use of robots. Beyond the motivation that can be considered on the part of the students, it was the teachers themselves who expressed an attitude of learning in order to integrate them into the educational experiences. The robot is a mediating tool, but the teacher is the one who has the capacity of inventiveness to integrate it in the classes. This integration helps to promote hybrid systems in learning environments, with the teacher-robot binomial (this was observed, to a greater extent, in the upper-middle level).
This study was guided by the question: what are the conditions that promote effective active Math learning with robotic support? The findings point to three key conditions: level, motivation, and teacher training: (a) Encouraging active learning with emerging technologies (in this case, with robotics), involves considering the educational level where the learning environments are targeted, with the profile of students (levels of construction of learning) as a central focus. (b) The motivation, according to the profile of the students of the formative experience, where robotics helps personalised learning. The introduction of robotics supports presenting the contents in a different way in order to change how they are taught in an ordinary situation. (c) The formation of teachers as a relevant aspect, where the pedagogical foundation goes beyond “programming the robot”, the teachers are the ones who “should be programmed” for the didactic use that starts from the planning, the articulation of strategies, the strategic arrangement of the moments in which the use of the robots is integrated, and the evaluation of the effects.
Thus, robotics is one of many technologies that can support the processes for increasing mathematical learning, where strategies cannot be left aside, regardless of the technology that is being integrated. Critical thinking skills, digital skills, and teamwork skills are reinforced with the introduction of these technologies, linked to the stages of doing, reviewing, learning, and applying that are encouraged through active learning. Future studies could be geared towards deepening the exploration of the effects of the use of robotics on the stages of active learning, and their contribution to concrete mathematical knowledge acquisition. Similarly, it is worth analysing the teaching processes in order to demonstrate the results of theoretical and practical knowledge when applying emerging technologies, such as robots in their classrooms. It is required, in itself, to expand the studies of management, psycho-pedagogical, and socio-cultural issues, in the application of technologies in innovative learning environments.
Author Contributions
Conceptualisation, E.L.-C. and M.S.R.-M.; Formal analysis, G.R.-A., S.M.-P. and E.L.-C.; Funding acquisition, E.L.-C. and M.S.R.-M.; Investigation, E.L.-C., G.R.-A., S.M.-P. and M.S.R.-M.; Methodology, G.R.-A. and E.L.-C.; Project administration, E.L.-C., M.S.R.-M., G.R.-A. and S.M.-P.; Writing—original draft, E.L.-C., G.R.-A., S.M.-P. and M.S.R.-M.; Writing—review & editing, G.R.-A. All authors have read and agreed to the published version of the manuscript.
Funding
The authors would like to acknowledge the financial support of Novus and Writing Lab, TecLabs, Tecnologico de Monterrey, Mexico, in the production of this work.
Acknowledgments
To the teachers, students and institutions involved. To Itzel Hernández at UNAM for her original illustration of the active learning process.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Pachidis, T.; Vrochidou, E.; Kaburlasos, V.G.; Kostova, S.; Bonković, M.; Papić, V. Social robotics in education: State-of-the-art and directions. In International Conference on Robotics in Alpe-Adria Danube Region; Aspragathos, N., Koustoumpardis, P., Moulianitis, V., Eds.; Springer: Cham, Germany, 2018; Volume 67, pp. 689–700. [Google Scholar]
- OECD. PISA 2018 Results (Volume I): What Students Know and Can Do; PISA, OECD Publishing: Paris, France, 2019. [Google Scholar] [CrossRef]
- OECD. PISA 2018 Results (Volume II): Where All Students Can Succeed; PISA, OECD Publishing: Paris, France, 2019. [Google Scholar] [CrossRef]
- Peter, E. Critical thinking: Essence for teaching Mathematics and Mathematics problem solving skills African. J. Math. Comput. Sci. Res. 2012, 5, 39–43. [Google Scholar] [CrossRef]
- OCDE. Informe PISA 2003. Aprender Para el Mundo de Mañana; Santillana: Madrid, Spain, 2005. [Google Scholar]
- Rico, L. Evaluación de competencias matemáticas. Proyecto PISA/OCDE 2003. In Investigación en Educación Matemática: Octavo Simposio de la Sociedad Española de Investigación en Educación Matemática (SEIEM); Castro, E., De la Torre, E., Eds.; Universidad da Coruña: Galicia, Spain, 2004; pp. 89–102. [Google Scholar]
- Rico, L.; Lupiáñez, J.L. Competencias Matemáticas Desde una Perspectiva Curricular; Alianza Editorial: Madrid, Spain, 2008. [Google Scholar]
- SEP. Matemáticas. Educación Secundaria PLAN y Programas de Estudio, Orientaciones Didácticas y Sugerencias de Evaluación; SEP: Ciudad de México, México, 2017. [Google Scholar]
- Martínez, X.; Camarena, P. (Eds.) La educación Matemática en el Siglo XXI; Instituto Politécnico Nacional: Distrito Federal, Mexico, 2015. [Google Scholar]
- INEE. La Educación Obligatoria en México. Informe 2019; INEE: Ciudad de México, Mexico, 2019. [Google Scholar]
- Ruiz-Velasco-Sánchez, E. Educatrónica: Innovación en el Aprendizaje de las Ciencias y la Tecnología; Ediciones Díaz Santos: Mexico City, Mexico, 2007. [Google Scholar]
- Chiara, D.L.M.; Inguaggiato, M.; Castro, E.; Cecchi, F.; Cioni, G.; Dell’Omo, M.; Laschi, C.; Pecini, C.; Santerini, G.; Sgandurra, G.; et al. Educational Robotics intervention on Executive Functions in preschool children: A pilot study. Comput. Human Behav. 2017, 71, 16–23. [Google Scholar]
- Williams, D.C.; Yuxin, M.; Prejean, L.; Ford, M.J.; Lai, G. Acquisition of physics content knowledge and scientific inquiry skills in a robotics summer camp. J. Res. Technol. Educ. 2012, 40, 201–216. [Google Scholar] [CrossRef]
- Ariza, D.V.; Palacio, A.M.; Aragón, I.P.; Pulido, C.M.; Logreira, E.A.; McKinley, J.R. Application of color sensor programming with LEGO-Mindstorms NXT 2.0 to recreate a simplistic plague detection scenario. Sci. Tech. 2017, 22, 268–272. [Google Scholar]
- Daniela, L.; Lytras, M.D. Educational Robotics for Inclusive Education. Technol. Knowl. Learn. 2019, 24, 219–225. [Google Scholar] [CrossRef]
- Günbatar, M.S.; Bakırcı, H. STEM teaching intention and computational thinking skills of pre-service teachers. Educ. Inf. Technol. 2019, 24, 1615–1629. [Google Scholar] [CrossRef]
- Román-Graván, P.; Hervás-Gómez, C.; Martín Padilla, A.H.; Fernández Márquez, E. Perceptions about the Use of Educational Robotics in the Initial Training of Future Teachers: A Study on STEAM Sustainability among Female Teachers. Sustainability 2020, 12, 4154. [Google Scholar] [CrossRef]
- Román-Graván, P.; Hervás-Gómez, C.; Guisado-Lizar, J.L. Experiencia de innovación educativa con robótica en la Facultad de Ciencias de la Educación de la Universidad de Sevilla (España). In Innovación Docente y uso de las TIC en Educación; Ruiz-Palmero, J., Sánchez-Rodríguez, J., Sánchez-Rivas, E., Eds.; UMA Editorial: Málaga, Spain, 2017; pp. 1–16. [Google Scholar]
- Martínez-Pérez, S.; Gutiérrez-Castillo, J.J.; Fernández-Robles, B. Percepciones y uso de las TIC en las aulas inclusivas. Un estudio de caso. EDMETIC 2018, 7, 87–106. [Google Scholar] [CrossRef]
- Karkazis, P.; Balourdos, P.; Pitsiakos, G.; Asimakopoulos, K.; Saranteas, I.; Spiliou, T. To water or not to water: The Arduino approach for the irrigation of a field. Int. J. Smart Educ. Urban Soc. 2018, 9, 25–36. [Google Scholar] [CrossRef]
- Khanlari, A. The Use of Robotics for STEM Education in Primary Schools: Teachers’ Perceptions. In Smart Learning with Educational Robotics; Daniela, L., Ed.; Springer: Cham, Germany, 2019. [Google Scholar] [CrossRef]
- Park, I.W.; Han, J. Teachers’ views on the use of robots and cloud services in education for sustainable development. Clust. Comput. 2016, 19, 987–999. [Google Scholar] [CrossRef]
- Negrini, L.; Giang, C. How do pupils perceive educational robotics as a tool to improve their 21st century skills? J. e-Learn. Knowl. Soc. 2019, 15, 77–87. [Google Scholar] [CrossRef]
- Gorman, N. Teachers Want More Training before Introducing Robots into the Classroom; Education World: Colchester, CT, USA, 2016; Available online: http://www.educationworld.com/a_news/teachers-want-more-training-introducing-robots-classroom-1642632440 (accessed on 14 October 2020).
- Nugent, G.; Barker, B.; Grandgenett, N.; Welcha, G. Robotics camps, clubs, and competitions: Results from a US robotics project. Robot. Auton. Syst. 2016, 75, 686–691. [Google Scholar] [CrossRef]
- Barrientos, A.; Peñín, L.F.; Balaguer, C. Fundamentos de Robótica; McGraw-Hill: London, UK, 2017. [Google Scholar]
- AliveRobots. Nao los Robots del Futuro Son una Realidad. Available online: https://aliverobots.com/nao/ (accessed on 2 October 2020).
- Lopez-Caudana, E.; Ponce, P.; Cervera, L.; Iza, S.; Mazon, N. Robotic platform for teaching maths in junior high school. Int. J. Interact. Des. Manuf. IJIDeM 2018, 12, 1349–1360. [Google Scholar] [CrossRef]
- Labrador, M.; Andreu, M. Metodologías Activas; Universidad Politécnica de Valencia: Valencia, Spain, 2008; Available online: http://www.upv.es/diaal/publicaciones/Andreu-Labrador12008_Libro%20Metodologias_Activas.pdf (accessed on 29 September 2020).
- Universidad ICESI. PEI Aprendizaje Activo; Editorial Universidad ICESI: Cali, Colombia, 2017; Available online: https://www.icesi.edu.co/contenido/pdfs/pei/PEI-Aprendizaje-Activo.pdf (accessed on 4 October 2020).
- Godino, J.D.; Giacomone, B.; Batanero, C.; Font, V. Enfoque ontosemiótico de los conocimientos y competencias del profesor de matemáticas. Bol. Educ. Matemática 2017, 31, 90–113. [Google Scholar] [CrossRef]
- Rocha, G.; Juárez, J.A.; Fuchs, O.L.; Rebolledo-Méndez, G. El rendimiento académico y las actitudes hacia las matemáticas con un Sistema Tutor Adaptativo. PNA. Rev. Investig. Didáctica Matemática 2020, 14, 271–294. [Google Scholar]
- Abu Bakar, M.A.; Ismail, N. Mathematical instructional: A conceptual of redesign of active learning with metacognitive regulation strategy. Int. J. Instr. 2020, 13, 633–648. [Google Scholar] [CrossRef]
- Wurdinger, S.; Newell, R.; Kim, E.S. Measuring life skills, hope, and academic growth. Improv. Sch. 2020, 23, 264–276. [Google Scholar] [CrossRef]
- Razali, N.; Zainuri, N.A.; Othman, H.; Nopiah, Z.M.; Bakar, N.A.A. Engineering Students’ Performances in Mathematics through Project-based Learning. Univers. J. Educ. Res. 2020, 8, 1899–1906. [Google Scholar] [CrossRef]
- Dennison, W.F.; Kirk, R. Do, Review, Learn and Apply: A Simple Guide to Experiential Learning; Blackwell: Oxford, UK, 1990. [Google Scholar]
- Watkins, C. Learning: A Sense-Maker’s Guide; Association of Teachers and Lecturers: London, UK, 2003. [Google Scholar]
- Watkins, C.; Lodge, C.; Carnell, E. Effective Learning in Classrooms; Sage: London, UK, 2007. [Google Scholar]
- Glasserman, L.D.; Ramírez-Montoya, M.S. Uso de recursos educativos abiertos (REA) y objetos de aprendizaje (OA) en educación básica. Educ. Knowl. Soc. EKS 2014, 15, 86–107. [Google Scholar]
- Marrero, T.; Ramírez-Montoya, M.S.; Ramírez-Hernández, D.C. Novel Use of a Remote Laboratory for Active Learning in Class. Chem. Eng. Educ. 2016, 50, 141–148. [Google Scholar]
- Özerem, A. Misconceptions in geometry and suggested solutions for seventh grade students. Procedia Soc. Behav. Sci. 2012, 55, 720–729. [Google Scholar]
- Pérez-González, M.E.; Ramírez-Montoya, M.S. Techno-andragogic Ecosystem Model for Active Learning: Digital age learners. In Proceedings of the 7th International Conference on Technological Ecosystems for Enhancing Multiculturality (TEEM 2019), Leon, Spain, 16–18 October 2019. [Google Scholar]
- Smith, J.G.; Suzuki, S. Embedded blended learning within an algebra classroom: A multimedia capture experiment. J. Comput. Assist. Learn. 2015, 31, 133–147. [Google Scholar] [CrossRef]
- Goos, M.; O’Donoghue, J.; Ríordáin, M.N.; Faulkner, F.; Hall, T.; O’Meara, N. Designing a national blended learning program for “out-of-field” mathematics teacher professional development. ZDM Math. Educ. 2020, 52, 1–13. [Google Scholar] [CrossRef]
- Arroyo, I.; Woolf, B.P.; Burelson, W.; Muldner, K.; Rai, D.; Tai, M. A multimedia adaptive tutoring system for Mathematics that addresses cognition, metacognition and affect. Int. J. Artif. Intell. Educ. 2014, 24, 387–426. [Google Scholar] [CrossRef]
- Oktaviyanthi, R.; Supriani, Y. Utilizing Microsoft Mathematics in Teaching and Learning Calculus. Indones. Math. Soc. J. Math. Educ. 2015, 6, 63–76. [Google Scholar] [CrossRef]
- Cueli, M.; González-Castro, P.; Krawec, J.; Núñez, J.C.; González-Pienda, J.A. Hipatia: A hypermedia learning environment in Mathematics. An. Psicol. 2016, 32, 98–105. [Google Scholar] [CrossRef]
- Sternberg, R.J. Psicologia Cognitiva, 7th ed.; Artmed: Porto Alegre, Brasil, 2017. [Google Scholar]
- European Commission. Digital Education Plan 2021–2027; European Union: Luxemburg, 2020. [Google Scholar]
- Sales, D.; Cuevas-Cerveró, A.; Gómez-Hernández, J.A. Perspectivas sobre la competencia informacional y digital de estudiantes y docentes de Ciencias Sociales antes y durante el confinamiento por la Covid-19. Prof. Inf. 2020, 29. Available online: https://recyt.fecyt.es/index.php/EPI/article/view/79360 (accessed on 6 October 2020).
- Villén, C. El Profesorado y las Tecnologías en Tiempos de Confinamiento por la Pandemia Covid-19. Creencias Sobre Actitudes, Formación, Competencia Digital e Importancia de las TIC en Educación. Master’s Thesis, Universidad de Salamanca, Salamanca, España, 2020. Available online: https://gredos.usal.es/handle/10366/143691 (accessed on 8 October 2020).
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).